 |
 |
|||||||||||||||
ą”ąĖčäčĆąŠą▓ąŠą╣ č鹥čĆą╝ąŠą╝ąĄčéčĆ ąĮą░ ą£ąÜ.
ąÉą▓č鹊čĆ: Mamonth
ą» ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠ ąĮąĄ ą╗čāčćčłąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé,
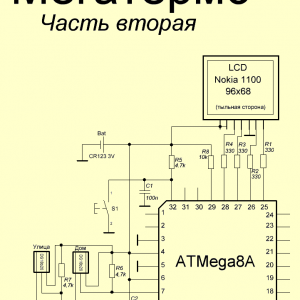
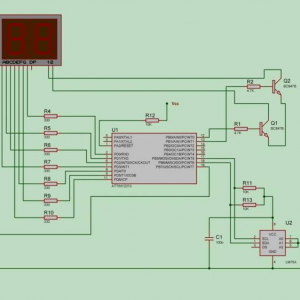
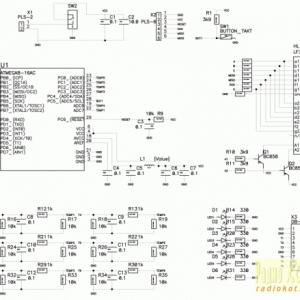
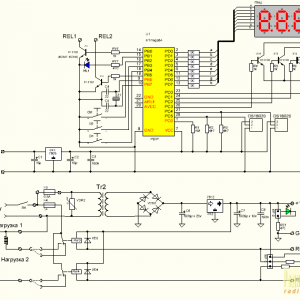
ąÜą░ą║ ą▓čüąĄą│ą┤ą░, ą╝ąĄąĮčÅ ą▓ ąŠč湥čĆąĄą┤ąĮąŠą╣ čĆą░ąĘ ą┐ąŠčüąĄčéąĖą╗ą░ ąĖą┤ąĄčÅ-čäąĖą║čü - čåąĖčäčĆąŠą▓ąŠą╣ č鹥čĆą╝ąŠą╝ąĄčéčĆ. ąöąŠą╗ą│ąŠ čģąŠą┤ąĖą▓ ąĖ ą┤čāą╝ą░ą▓, čćč鹊 ąČąĄ čÅ čģąŠčćčā ą║ąŠąĮą║čĆąĄčéąĮąŠ, čüč乊čĆą╝ąĖčĆąŠą▓ą░ą╗ąĖčüčī čüą╗ąĄą┤čāčÄčēąĖąĄ čāčüą╗ąŠą▓ąĖčÅ ąĘą░ą┤ą░čćąĖ: a.DS18B20 - č鹊čćąĮąŠčüčéčī ą┤ąŠ 0,0625 ą│čĆą░ą┤. (ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝ą░čÅ). b.DS18S20/DS1820 - č鹊čćąĮąŠčüčéčī ą┤ąŠ 0,5 ą│čĆą░ą┤. c.DS1821 - č鹊čćąĮąŠčüčéčī ą┤ąŠ 1 ą│čĆą░ą┤. ąóčāčé čāąČ ą▓čŗą▒ąĖčĆą░ą╣č鹥 ąĮą░ čüą▓ąŠą╣ ą▓ą║čāčü ąĖ čåą▓ąĄčé, ąĖ ąĖčüčģąŠą┤čÅ ąĖąĘ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ąĘą░ą┤ą░čćąĖ. ą» ąĮąĄ ąĘą░ą┤ą░ą▓ą░ą╗čüčÅ čåąĄą╗čīčÄ ą▓čŗą▓ąŠą┤ąĖčéčī ą┤ąĄčüčÅčéčŗąĄ ą┤ąŠą╗ąĖ ą│čĆą░ą┤čāčüą░. ąĀą░ąĘąĮąĖčåą░ ą▓ čåąĄąĮąĄ ąĮąĄą▒ąŠą╗čīčłą░čÅ.
ąöą╗čÅ ąĮą░čćą░ą╗ą░, čüą┤ąĄą╗ą░ąĄą╝ ąĖąĮą┤ąĖą║ą░čåąĖčÄ ą▓čŗą▓ąŠą┤ąĖą╝čŗčģ ąĘąĮą░č湥ąĮąĖą╣. ąóčāčé ą▒čāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ąĖąĮą░ą╝ąĖą║čā 菹╗ąĄą║čéčĆąĖč湥čüčéą▓ą░ ąĖ ąĖąĮąĄčĆčéąĮąŠčüčéčī ą▓ąŠčüą┐čĆąĖčÅčéąĖčÅ ą║ą░čĆčéąĖąĮą║ąĖ ą│ą╗ą░ąĘąŠą╝ (čüą╝ąŠčéčĆąĖ ąŠą▒čāčćą░ą╗ą║čā),. ąó.ąĄ. ą┐ąŠą┐čĆąŠčüčéčā ą▒čāą┤ąĄą╝ ą▒čŗčüčéčĆąĄąĮčīą║ąŠ ąŠą▒ąĮąŠą▓ą╗čÅčéčī ą┤ą░ąĮąĮčŗąĄ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆąĄ, čéą░ą║ ą▒čŗčüčéčĆąŠ, čćč鹊 ą│ą╗ą░ąĘ ąĮąĄ ąĘą░ą╝ąĄčéąĖčé. ą¦č鹊ą▒čŗ ąĮąĄ ąĘą░ą╝ąŠčĆą░čćąĖą▓ą░čéčīčüčÅ čü č鹥ą╝, ą║ąŠą│ą┤ą░ ąĖ ąĮą░ čüą║ąŠą╗čīą║ąŠ ąĘą░čüą▓ąĄčćąĖą▓ą░čéčī čĆą░ąĘčĆčÅą┤čŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝ čĆąĄą│ąĖčüčéčĆ TCCR0.
// Timer/Counter 0 initialization ąŚą┤ąĄčüčī: TCCR0 - čĆąĄą│ąĖčüčéčĆ ąĘą░ą┤ą░čÄčēąĖą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą╝ą║ (čüą╝. ą┤ą░čéą░čłąĖčé) 
ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÅ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖč鹊ą▓ 0...2, ą╝čŗ ą╝ąŠąČąĄą╝ ąĘą░ą┤ą░ą▓ą░čéčī ą║ąŠčŹčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ. ą×ąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ: 
ąÜą░ą║ ą▓ąĖą┤ąĖą╝ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ čćą░čüč鹊čéčā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤čā ą▒čŗą▓ą░ąĄčé ąŠč湥ąĮčī čāą┤ąŠą▒ąĮčŗą╝ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ.
//ąōą╗ąŠą▒ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüčéčĆąŠą║ąĖ ą▓čŗą▓ąŠą┤ą░ ąóą░ą║ąČąĄ čüąŠąĘą┤ą░ą┤ąĖą╝ 2 ą╝ą░čüčüąĖą▓ą░, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą║ą░ą║ąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą▓ą║ą╗čÄčćą░čéčī:
//ą”ąĖčäčĆčŗ ąöą░ą╗ąĄąĄ ąŠą┐ąĖčüčŗą▓ą░ąĄą╝ ą┐čĆąŠčåąĄą┤čāčĆčā ą▓čŗą▓ąŠą┤ą░ čĆą░ąĘčĆčÅą┤ą░ (ąŠąĮą░ ąČąĄ čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠčåąĄą┤čāčĆąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ):
//Timer 0 interrupt
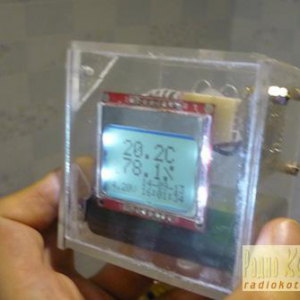
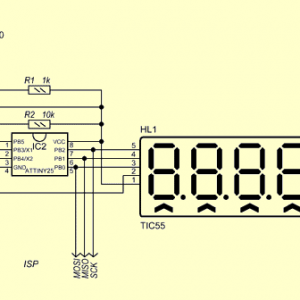
ąöą░ą╗ąĄąĄ, ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ ą▓čüąĄ ą┐ąŠ čüčģąĄą╝ąĄ. ąóčāčé čüč鹊ąĖčé ąŠčéą╝ąĄčéąĖčéčī čćč鹊 čÅ ą╝ą░ą╗ąŠčüčéčī ąĮąĄą▓ąĄčĆąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ ą▓čŗą▓ąŠą┤čŗ ąĖąĮą┤ąĖą║ą░č鹊čĆą░. ąøčāčćčłąĄ čüą║ą░ąĘą░čéčī ąĮąĄ ą║ą░ą║ ą▓čüąĄ. ąĢčüą╗ąĖ ąÆčŗ ą▒čāą┤ąĄč鹥 ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą┐ąŠ-čüą▓ąŠąĄą╝čā ąĖąĮą┤ąĖą║ą░č鹊čĆ, ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé ąĖąĘą╝ąĄąĮąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ digit_ar[]. ąśą╝ąĄą╣č鹥 ą▓ą▓ąĖą┤čā. ąÜąŠą╝ą┐ąĖą╗ąĖčĆčāąĄą╝. ą¤čĆąŠčłąĖą▓ą░ąĄą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąöąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī čéą░ą║ąŠą╣ ą▓ąŠčé čĆąĄąĘčāą╗čīčéą░čé: 
ąĢčüą╗ąĖ čāą▓ąĖą┤ąĄą╗ąĖ, č鹊 ą▓čüąĄ čģąŠčĆąŠčłąŠ. ąĢčüą╗ąĖ ąĮąĄčé, ąĖčēąĄą╝ ą║ąŠčüčÅą║. 
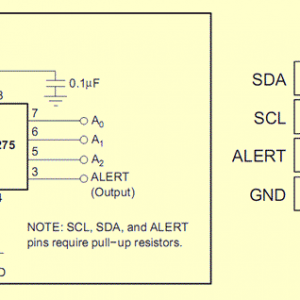
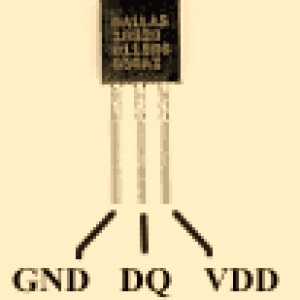
ąŻ ą┤ą░ąĮąĮčŗčģ ą┤ą░čéčćąĖą║ąŠą▓ ąĄčüčéčī 2 čĆąĄąČąĖą╝ą░ ą┐ąĖčéą░ąĮąĖčÅ: ąŠčüąĮąŠą▓ąĮąŠąĄ ąĖ ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ. ą¤čĆąĖ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┐ąĖčéą░ąĮąĖąĖ ąĮą░ ąĮąŠąČą║čā Vdd ąŠčéą┤ąĄą╗čīąĮąŠ ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ +3..+5 ąÆ. ą¤čĆąĖ ą┐ą░čĆą░ąĘąĖčéąĮąŠą╝, ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 čāą▒čĆą░čéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čü ą▓čŗą▓ąŠą┤ą░ Vdd ąĖ ą▓čüąĄ ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčī čĆą░ą▒ąŠčéą░čéčī! ą¤ąŠ ą┤ą░čéą░čłąĖčéčā ą╝ąĄąČą┤čā Vdd ąĖ DQ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī čĆąĄąĘąĖčüč鹊čĆ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ 4.7 ąÜ. ąÜčüčéą░čéąĖ, ą┐ąŠ čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā ąĮą░ 1-wire, čĆąĄąĘąĖčüč鹊čĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ 220 ą×ą╝. ąóą░ą║ąŠą╣ ą▓ąŠčé "ą┐ą░čĆą░ą┤ąŠą║čü". ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤ą░čéčćąĖą║ąŠą▓ DS18XXX ąĮčāąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ. ąöą╗čÅ DS18S20/DS1820, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ čÅ, čŹč鹊 ds1820.h. ąØąŠ! ą¤čĆąĄąČą┤ąĄ č湥ą╝ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī čŹčéčā ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąŠą╣ ą┐ąŠčĆčé čā ąÆą░čü ą▒čāą┤ąĄčé ą┐ąŠčĆč鹊ą╝ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ 1-WIRE.
#asm ąś č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓ą║ą╗čÄčćą░čéčī ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗:
#include
ąĢčüą╗ąĖ ą▓ą║ą╗čÄčćąĖčéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čĆą░ąĮčīčłąĄ č湥ą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠčĆčé, ą┐čĆąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ CVAVR ą┤ą░čüčé ąŠčłąĖą▒ą║čā.
#define MAX_DEVICES 8 ą×ą┐čĆąĄą┤ąĄą╗čÅąĄą╝ ą╝ą░čüčüąĖą▓ ą┤ą░ąĮąĮčŗčģ-ą║ąŠą┤ąŠą▓ ą┤ą░čéčćąĖą║ąŠą▓ - 8 ąĘą░ą┐ąĖčüąĄą╣ ą┐ąŠ 9 čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ ą║ą░ąČą┤ąŠą╣. unsigned char rom_codes[MAX_DEVICES][9]; ąöą╗čÅ ą┐ąŠąĖčüą║ą░ čāčüčéčĆąŠą╣čüčéą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ čüą╗ąĄą┤. ąÜąŠą╝ą░ąĮą┤čā:
#asm("cli");
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ! ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠą╝ą░ąĮą┤ čĆą░ą▒ąŠčéčŗ čü 1-wire ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠčéą║ą╗čÄčćą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ!!! ą¦č鹊 čüą░ą╝ąŠ ą┐ąŠ čüąĄą▒ąĄ ą╗ąŠą│ąĖčćąĮąŠ, ąĖą▒ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāą┤ąĄčƹȹĖą▓ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ 0 ąĖ 1 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĖ ąČą┤ą░čéčī ąŠčéą▓ąĄčéą░. ąÉ čéą░ą║ ą║ą░ą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ąŠčüąĮąŠą▓ąĮčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā, č鹊 ąĘą░ą┤ąĄčƹȹ║ąĖ ą▒čāą┤čāčé ą╝ąĮąŠą│ąŠ ą▒ąŠą╗čīčłąĄ čāą║ą░ąĘą░ąĮąĮčŗčģ. ą¤ąŠą╗ąĄąĘčāčé ąŠčłąĖą▒ą║ąĖ.
#asm("cli");
ąÆąŠčé, čüąŠą▒čüčéą▓ąĄąĮąĮąŠ ąĖ ą▓čüčæ. 
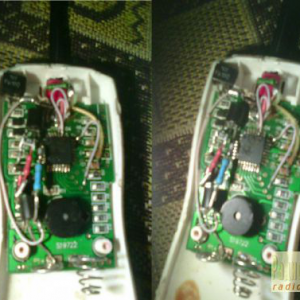
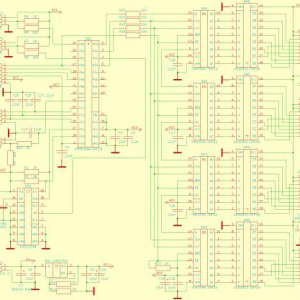
ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ ą║ą░čĆčéąĖąĮą║ą░ ąĮčāąČąĮą░, čćč鹊ą▒čŗ čāą▓ąĖą┤ąĄčéčī, ą║ą░ą║ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ą▓ąĄčüčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖ ą║ą░ą║ąĖąĄ ą▒čŗą▓ą░čÄčé ąĖčüč鹊čćąĮąĖą║ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÜą░čĆčéąĖąĮą║ą░ čüčĆąĖčüąŠą▓ą░ąĮą░ čü ąŠčäąĖčåąĖą░ą╗čīąĮąŠą│ąŠ ą┤ą░čéą░čłąĖčéą░ ąĖ ąĖą╝ąĄąĄčé ąĮą░ą┤ą┐ąĖčüąĖ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĮą░ čĆčāčüčüą║ąŠą╝ čÅąĘčŗą║ąĄ. ąÆąĖą┤ąĖą╝ 5 ą▓ąĖą┤ąŠą▓ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÆąŠ-ą┐ąĄčĆą▓čŗčģ, ą┤ą╗čÅ č湥ą│ąŠ ąĮčāąČąĮąŠ čüč鹊ą╗čīą║ąŠ čäčāąĘąŠą▓ ąĖ ą┐ąŠč湥ą╝čā ą▓čüąĄ čéą░ą║ čüą╗ąŠąČąĮąŠ? ąóčāčé ąŠčéą▓ąĄčé ą┐čĆąŠčüčé, čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą▓ąĖą┤čŗ čéą░ą║č鹊ą▓čŗčģ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ ąĖą╝ąĄčÄčé čĆą░ąĘą╗ąĖčćąĮčāčÄ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ąĖ ą▓čĆąĄą╝čÅ ą▓čŗčģąŠą┤ą░ ąĮą░ ąĮąŠą╝ąĖąĮą░ą╗čīąĮčāčÄ (čĆą░ą▒ąŠčćčāčÄ) čćą░čüč鹊čéčā. ą£ąÜ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐čĆąŠą┐čāčüą║ą░ąĄčé ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓, ą┤ąŠąČąĖą┤ą░čÅčüčī, ą║ąŠą│ą┤ą░ ąČąĄ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░čćąĮąĄčé čĆą░ą▒ąŠčéą░čéčī, ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čüą▒čĆąŠčü ą£ąÜ ąĖ č鹊ą╗čīą║ąŠ ąĘą░č鹥ą╝ ą▓čŗčģąŠą┤ąĖčé ąĮą░ čĆą░ą▒ąŠčćąĖą╣ čåąĖą║ą╗. ąÆąŠ-ą▓č鹊čĆčŗčģ, ą┤ą╗čÅ čāą┤ąŠą▒čüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ (ąĮąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░čģ, ą░ ąĖą╝ąĄąĮąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ - čāčüčéčĆąŠą╣čüčéą▓ą░čģ) ą▓ą▓ąĄą╗ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ. ąóą░ą╝ ą│ą┤ąĄ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗčüąŠą║ą░čÅ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī, ą╝ąŠąČąĮąŠ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖą╝ąĄąĮąĮąŠ ąĖą╝. ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čüąĄą╝ č鹥ą╝, ąŠ č湥ą╝ čÅ ą┐ąĖčüą░ą╗ ą▓čŗčłąĄ ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čäčāąĘčŗ.

ąØąĄ ąĘą░ą▒čŗą▓ą░ą╣č鹥 ą┐čĆąŠ č鹊 čćč鹊 0 - čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ čäčāąĘ, 1 - čüąĮčÅčéčŗą╣. ąÆ PonyProg, ą│ą░ą╗ąŠčćą║ą░ - čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ čäčāąĘ, ąŠą┤ąĮą░ą║ąŠ ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą▒čāą┤ąĄčé čüč鹊čÅčéčī - 0!!!
ąĢčüčéčī ąĄčēčæ ąŠą┤ąĖąĮ čäčāąĘ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ąĖčüč鹊čćąĮąĖą║ąŠą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. CKOPT (ClocKin OPTion - ąŠą┐čåąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ). ąÜąŠą╝ą▒ąĖąĮą░čåąĖčÅą╝ čäčāąĘąŠą▓ CKSEL, SUT ąĖ CKOPT ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčé ą▓čüąĄą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą£ąÜ.

ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ ą£ąÜ čéą░ą║ąČąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ "ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī" čäčāąĘą░ą╝ąĖ ą┤ą╗čÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ. 
ą×ą┐čÅčéčī ąČąĄ čéą░ą▒ą╗ąĖčćą║ą░ ąĮą░ą│ą╗ąŠ čüąŠą┤čĆą░ąĮą░ čü ą┤ą░čéą░čłąĖčéą░.

1ąŁčéčā ąŠą┐čåąĖčÄ čüč鹊ąĖčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą│ą┤ą░ čćą░čüč鹊čéą░ ąĮąĄ ą▒ą╗ąĖąĘą║ą░ ą║ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣, čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéąĖ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ąĮąĄą▓čŗčüąŠą║ąĖ.
ą¦čāčéčī ąĮąĄ ąĘą░ą▒čŗą╗ ą┐čĆąŠ ąĄčēčæ ąŠą┤ąĮąĖ ą│čĆą░ą▒ą╗ąĖ. DSXXX ą▒ąŠčÅčéčüčÅ ą┐ąĄčĆąĄą┐ąŠą╗čÄčüąŠą▓ą║ąĖ ąĖ ą┐ąĄčĆąĄąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¤ą░čĆąŠčćą║čā čüą┐ą░ą╗ąĖą╗, ąĘą░ ą▓čĆąĄą╝čÅ ąŠą┐čŗč鹊ą▓.
ążą░ą╣ą╗čŗ: ąÆčüąĄ ą▓ąŠą┐čĆąŠčüčŗ - ą▓ č乊čĆčāą╝.
ąŁčéąĖ čüčéą░čéčīąĖ ą▓ą░ą╝ č鹊ąČąĄ ą╝ąŠą│čāčé ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ: |
|
|||||||||||||||
 |
 |


 |
||||

|
||||












{kind=link}
ąĀą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüą░ą╣čéą░ ą┐čĆąŠą▓ąĄčĆąĄąĮą░ ą▓ ą▒čĆą░čāąĘąĄčĆą░čģ:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
ąÉą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ 菹║čĆą░ąĮą░ ąŠčé 1280čģ1024 ąĖ ą▓čŗčłąĄ.
ą¤čĆąĖ ą╝ąĄąĮčīčłąĖčģ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ ą┐čĆąŠą║čĆčāčéą║ąĖ.
ą¤ąŠ ą▓čüąĄą╝ ą▓ąŠą┐čĆąŠčüą░ą╝ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ąÜąŠčéčā: kot@radiokot.ru
©2005-2026