 |
 |
||||||||||||||||||
–Ý–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª–µ–Ω–∏e –Ω–∞ –º–æ–¥—É–ª—è—Ö ZETA
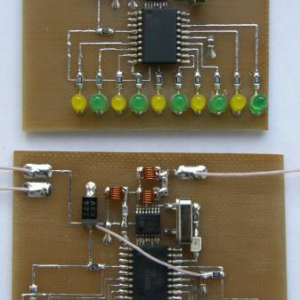
–ê–≤—Ç–æ—Ä: –°–µ—Ä–≥–µ–π –ë–µ–∑—Ä—É–∫–æ–≤ (aka Ser60) –∏ Jennifer Vang, sergeilb60@mail.ru –°—É–¥—è –ø–æ —Ñ–æ—Ä—É–º—É –Ω–∞ –Ω–∞—à–µ–º —Å–∞–π—Ç–µ, –Ω–∞ –ø—Ä–æ—Ç—è–∂–µ–Ω–∏–∏ —Ä—è–¥–∞ –ª–µ—Ç —Ç–µ–º–∞ —Ä–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –≤—ã–∑—ã–≤–∞–µ—Ç –Ω–µ—É–≥–∞—Å–∏–º—ã–π –∏–Ω—Ç–µ—Ä–µ—Å —É —Å–æ–æ–±—â–µ—Å—Ç–≤–∞. –Ø —Ä–∞—Å—Å–∫–∞–∑–∞–ª –æ–± —ç—Ç–æ–º –º–æ–µ–π —Å—Ç—É–¥–µ–Ω—Ç–∫–µ Jenni, –≤ —Ä–µ–∑—É–ª—å—Ç–∞—Ç–µ —á–µ–≥–æ –∏ –±—ã–ª–æ –ø—Ä–∏–Ω—è—Ç–æ —Ä–µ—à–µ–Ω–∏–µ –æ–ø—É–±–ª–∏–∫–æ–≤–∞—Ç—å –∑–¥–µ—Å—å –µ—ë –ø—Ä–æ–µ–∫—Ç. –¶–µ–ª—å—é –ø—Ä–æ–µ–∫—Ç–∞ –±—ã–ª–æ –∏–∑–≥–æ—Ç–æ–≤–ª–µ–Ω–∏–µ —Ä–∞–¥–∏–æ-—É–ø—Ä–∞–≤–ª—è–µ–º–æ–π –∫–æ–ª—ë—Å–Ω–æ–π –º–æ–¥–µ–ª–∏. Jenni –≤—ã–±—Ä–∞–ª–∞ 2-–º–æ—Ç–æ—Ä–Ω—É—é 3-–∫–æ–ª—ë—Å–Ω—É—é –ø–ª–∞—Ç—Ñ–æ—Ä–º—É [1], –ø–æ–∑–≤–æ–ª—è—é—â—É—é –ª–µ–≥–∫–æ, –≤ –ø–ª–∞–Ω–µ –º–µ—Ö–∞–Ω–∏–∫–∏, –æ–≥—Ä–∞–Ω–∏–∑–æ–≤–∞—Ç—å –µ—ë –¥–≤–∏–∂–µ–Ω–∏–µ –≤ –æ–±–æ–∏—Ö –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏—è—Ö –∏ –ø–æ–≤–æ—Ä–æ—Ç—ã –ø—É—Ç—ë–º –≤—Ä–∞—â–µ–Ω–∏—è –ø—Ä–∏–≤–æ–¥–æ–≤ –∫–æ–ª—ë—Å –≤ —Ä–∞–∑–Ω—ã–µ —Å—Ç–æ—Ä–æ–Ω—ã. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –º—ã –æ–ø—Ä–µ–¥–µ–ª–∏–ª–∏—Å—å –≤ —Å–ø–∏—Å–∫–µ —Å–ª–µ–¥—É—é—â–∏—Ö –ø—è—Ç–∏ –∫–æ–º–∞–Ω–¥ —Ä–∞–¥–∏–æ-—É–ø—Ä–∞–≤–ª–µ–Ω–∏—è: –≤–ø–µ—Ä—ë–¥, –Ω–∞–∑–∞–¥, –≤–ø—Ä–∞–≤–æ, –≤–ª–µ–≤–æ, –∏ —Å—Ç–æ–ø. Jenni —Ö–æ—Ç–µ–ª–∞ –µ—â—ë –ø—Ä–µ–¥—É—Å–º–æ—Ç—Ä–µ—Ç—å —Ä–µ–∂–∏–º –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–æ–≥–æ –æ–±—Ö–æ–¥–∞ –ø—Ä–µ–ø—è—Ç—Å—Ç–≤–∏–π –º–æ–¥–µ–ª—å—é, –¥–ª—è —á–µ–≥–æ –Ω–∞ —à–∞—Å—Å–∏ –±—ã–ª–∏ —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω—ã –∏–Ω—Ñ—Ä–∞–∫—Ä–∞—Å–Ω—ã–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥—ã –∏ –ø—Ä–∏—ë–º–Ω–∏–∫–∏. –û–¥–Ω–∞–∫–æ, –∏–∑-–∑–∞ –Ω–µ–¥–æ—Å—Ç–∞—Ç–∫–∞ –≤—Ä–µ–º–µ–Ω–∏ –≤–æ –≤—Ä–µ–º—è —Å–µ–º–µ—Å—Ç—Ä–∞ —ç—Ç–∞ –æ–ø—Ü–∏—è –æ—Å—Ç–∞–ª–∞—Å—å –Ω–µ—Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω–Ω–æ–π. –°–æ–±—Ä–∞–Ω–Ω–∞—è –º–æ–¥–µ–ª—å –ø–æ–∫–∞–∑–∞–Ω–∞ —Å–ø—Ä–∞–≤–∞.
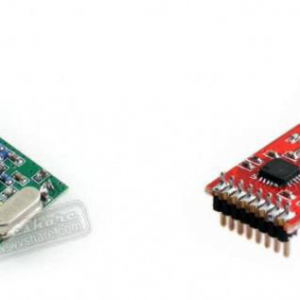
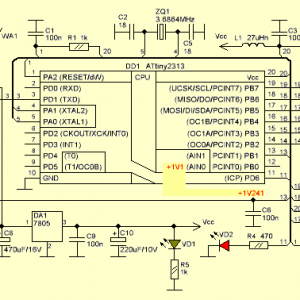
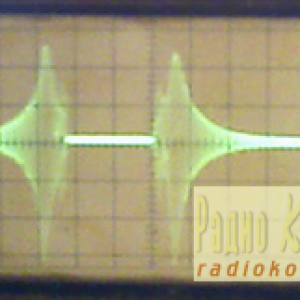
–ü–µ—Ä–≤–æ–µ, —Å —á–µ–≥–æ –Ω–∞—á–∏–Ω–∞—é—Ç –≤ –ø–æ–¥–æ–±–Ω—ã—Ö –ø—Ä–æ–µ–∫—Ç–∞—Ö – —ç—Ç–æ –≤—ã–±–æ—Ä —Ä–∞–¥–∏–æ—Ç—Ä–∞–∫—Ç–∞. –ü—Ä–∏—á—ë–º –≤ —Ü–µ–ª—è—Ö —É–ø—Ä–æ—â–µ–Ω–∏—è –¥–∏–∑–∞–π–Ω–∞ –∏ —Å–æ–∫—Ä–∞—â–µ–Ω–∏—è —Å—Ä–æ–∫–æ–≤ —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ –º–Ω–æ–≥–∏–µ —Å–µ–≥–æ–¥–Ω—è –∏—Å–ø–æ–ª—å–∑—É—é—Ç –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω—ã–µ —Ä–∞–¥–∏–æ-–º–æ–¥—É–ª–∏. –û–¥–Ω–∏ –∏–∑ –ª—É—á—à–∏—Ö –∏–∑–≤–µ—Å—Ç–Ω—ã—Ö –º–Ω–µ —Ä–∞–¥–∏–æ-–º–æ–¥—É–ª–µ–π –¥–ª—è —Å—É–±-–≥–∏–≥–∞–≥–µ—Ä—Ü–æ–≤–æ–≥–æ –¥–∏–∞–ø–∞–∑–æ–Ω–∞ –æ—Å–Ω–æ–≤–∞–Ω—ã –Ω–∞ —á–∏–ø–∞—Ö –ø—Ä–æ–∏–∑–≤–æ–¥—Å—Ç–≤–∞ Silicon Labs –∏ Texas Instruments. –£ –º–µ–Ω—è –∑–¥–µ—Å—å –∏–º–µ—é—Ç—Å—è —Å—Ç–∞—Ç—å–∏ –ø–æ —Ä–∞–±–æ—Ç–µ —Å —ç—Ç–∏–º–∏ —á–∏–ø–∞–º–∏ [2]. –ö —Å–æ–∂–∞–ª–µ–Ω–∏—é, –º–æ–¥—É–ª–∏ –Ω–∞ –æ—Å–Ω–æ–≤–µ —á–∏–ø–æ–≤ —ç—Ç–∏—Ö —Ñ–∏—Ä–º –≤—ã–ø—É—Å–∫–∞—é—Ç—Å—è —Ç–æ–ª—å–∫–æ —Å—Ç–æ—Ä–æ–Ω–Ω–∏–º–∏ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç–µ–ª—è–º–∏, –≤ —á–∏—Å–ª–æ –∫–æ—Ç–æ—Ä—ã—Ö –≤—Ö–æ–¥–∏—Ç –∏–∑–≤–µ—Å—Ç–Ω–∞—è –∫–∏—Ç–∞–π—Å–∫–∞—è —Ñ–∏—Ä–º–∞ HopeRF. –ö–∞–∫–æ–≤–æ-–∂–µ –±—ã–ª–æ –Ω–∞—à–µ —É–¥–∏–≤–ª–µ–Ω–∏–µ, –∫–æ–≥–¥–∞ –º—ã –æ–±–Ω–∞—Ä—É–∂–∏–ª–∏ –º–æ–¥—É–ª–∏ —Å–µ–º–µ–π—Å—Ç–≤–∞ ZETA –∞–Ω–≥–ª–∏–π—Å–∫–æ–π —Ñ–∏—Ä–º—ã RF Solutions, –æ—Å–Ω–æ–≤–∞–Ω–Ω—ã–µ –Ω–∞ —á–∏–ø–∞—Ö —Ç—Ä–∞–Ω—Å–∏–≤–µ—Ä–æ–≤ Si4455 —Å–µ–º–µ–π—Å—Ç–≤–∞ EZRadio® –∫–æ–º–ø–∞–Ω–∏–∏ Silicon Labs. –ß—Ç–æ –µ—â—ë –±–æ–ª–µ–µ —É–¥–∏–≤–∏—Ç–µ–ª—å–Ω–æ – –æ–∫–∞–∑–∞–ª–æ—Å—å, —á—Ç–æ –æ–± —ç—Ç–∏—Ö –º–æ–¥—É–ª—è—Ö –Ω–µ –∑–Ω–∞–ª –¥–∞–∂–µ –º–æ–π –∫–æ–Ω—Ç–∞–∫—Ç —Å —Ñ–∏—Ä–º—ã. –ü–æ—Å–∫–æ–ª—å–∫—É –Ω–∞–º —ç—Ç–∏ –º–æ–¥—É–ª–∏ –±—ã–ª–∏ –ø—Ä–æ—â–µ –∏ –±—ã—Å—Ç—Ä–µ–µ –¥–æ—Å—Ç—É–ø–Ω—ã —á–µ—Ä–µ–∑ DigiKey —á–µ–º –∫–∏—Ç–∞–π—Å–∫–∏–µ, –º—ã –æ—Å—Ç–∞–Ω–æ–≤–∏–ª–∏—Å—å –Ω–∞ –Ω–∏—Ö. –ü–µ—Ä–µ–¥–∞—Ç—á–∏–∫ –î–ª—è –æ—Ç—Å—ã–ª–∫–∏ –¥–∞–Ω–Ω—ã—Ö —Å–ª–µ–¥—É–µ—Ç —Å—Ñ–æ—Ä–º–∏—Ä–æ–≤–∞—Ç—å –ø–∞–∫–µ—Ç, –∑–∞–≥—Ä—É–∑–∏—Ç—å –µ–≥–æ –≤ FIFO —Ç—Ä–∞–Ω—Å–∏–≤–µ—Ä–∞ –∏ –ø–æ–¥–∞—Ç—å –≤ —á–∏–ø –∫–æ–º–∞–Ω–¥—É –ø–µ—Ä–µ–¥–∞—á–∏. –ü—Ä–∏ —ç—Ç–æ–º –æ–±—Ä–∞–±–æ—Ç—á–∏–∫ –ø–∞–∫–µ—Ç–æ–≤ –≤–Ω—É—Ç—Ä–∏ —á–∏–ø–∞ –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –¥–æ–±–∞–≤–∏—Ç –∫ –¥–∞–Ω–Ω—ã–º –ø—Ä–µ–∞–º–±—É–ª—É, —Å–∏–Ω—Ö—Ä–æ—Å–ª–æ–≤–æ, –∞ —Ç–∞–∫–∂–µ –≤—ã—á–∏—Å–ª–∏—Ç –∏ –¥–æ–±–∞–≤–∏—Ç –±–∞–π—Ç—ã CRC –¥–ª—è –ø—Ä–æ–≤–µ—Ä–∫–∏ –Ω–∞ –æ—à–∏–±–∫–∏ –ø–µ—Ä–µ–¥–∞—á–∏ –Ω–∞ –ø—Ä–∏—ë–º–Ω–æ–º –∫–æ–Ω—Ü–µ. –ü–æ –æ–∫–æ–Ω—á–∞–Ω–∏–∏ –ø–µ—Ä–µ–¥–∞—á–∏ –ø–∞–∫–µ—Ç–∞ —Ç—Ä–∞–Ω—Å–∏–≤–µ—Ä, —Å–æ–≥–ª–∞—Å–Ω–æ –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏–∏, –ø–µ—Ä–µ–π–¥—ë—Ç –≤ —Ä–µ–∂–∏–º —Å–Ω–∞ —Å —Å—É–±-–º–∏–∫—Ä–æ–∞–º–ø–µ—Ä–Ω—ã–º –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ–º. –ü—Ä–æ—â–µ –Ω–µ –±—ã–≤–∞–µ—Ç, —Å–º. –ø–æ–¥—Ä–æ–±–Ω–µ–µ –≤ [2]. –î–ª–∏–Ω–∞ –ø–µ—Ä–µ–¥–∞–≤–∞–µ–º–æ–≥–æ –ø–∞–∫–µ—Ç–∞ –¥–∞–Ω–Ω—ã—Ö 4 –±–∞–π—Ç–∞. –ü–µ—Ä–≤—ã–π –±–∞–π—Ç – —ç—Ç–æ –¥–ª–∏–Ω–∞ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–æ–Ω–Ω–æ–π —á–∞—Å—Ç–∏ –ø–∞–∫–µ—Ç–∞, –≤—Ç–æ—Ä–æ–π –∏ —Ç—Ä–µ—Ç–∏–π –±–∞–π—Ç—ã – ID –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ –∏ –ø—Ä–∏—ë–º–Ω–∏–∫–∞ (—É –Ω–∞—Å 0xAA –∏ 0xBB, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ). –ù–∞–∫–æ–Ω–µ—Ü, –ø–æ—Å–ª–µ–¥–Ω–∏–π –±–∞–π—Ç – —ç—Ç–æ –∫–æ–¥ –∫–æ–º–∞–Ω–¥—ã –º–æ–¥–µ–ª–∏: 1=–≤–ø–µ—Ä—ë–¥, 2=–≤–ª–µ–≤–æ, 3=–Ω–∞–∑–∞–¥, 4=–≤–ø—Ä–∞–≤–æ, 5=—Å—Ç–æ–ø. –ö–Ω–æ–ø–∫–∏ –¥–ª—è –ø–æ–¥–∞—á–∏ —ç—Ç–∏—Ö –∫–æ–º–∞–Ω–¥ –ø–æ–¥–∫–ª—é—á–µ–Ω—ã, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ, –∫ –≤—ã–≤–æ–¥–∞–º 12, 11, 13, 4, –∏ 3 –ú–ö. –î–ª—è –Ω–∞—à–∏—Ö —Ü–µ–ª–µ–π –ø–æ –Ω–∞–∂–∞—Ç–∏–∏ –ª—é–±–æ–π –∏–∑ –∫–Ω–æ–ø–æ–∫ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∞—è –∫–æ–º–∞–Ω–¥–∞ –ø–µ—Ä–µ–¥–∞—ë—Ç—Å—è —Ç–æ–ª—å–∫–æ –æ–¥–∏–Ω —Ä–∞–∑. –î–ª—è –ø–æ–≤—Ç–æ—Ä–Ω–æ–π –ø–µ—Ä–µ–¥–∞—á–∏ –∫–æ–º–∞–Ω–¥—ã –∫–Ω–æ–ø–∫—É —Å–ª–µ–¥—É–µ—Ç –æ—Ç–ø—É—Å—Ç–∏—Ç—å –∏ –∑–∞–Ω–æ–≤–æ –Ω–∞–∂–∞—Ç—å. –ü—Ä–∏ –æ–¥–Ω–æ–≤—Ä–µ–º–µ–Ω–Ω–æ–º –Ω–∞–∂–∞—Ç–∏–∏ –Ω–µ—Å–∫–æ–ª—å–∫–∏—Ö –∫–Ω–æ–ø–æ–∫ –ø–µ—Ä–µ–¥–∞—ë—Ç—Å—è –ª–∏—à—å –æ–¥–Ω–∞ –∫–æ–º–∞–Ω–¥–∞, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∞—è –ø–æ—Å–ª–µ–¥–Ω–µ–π –Ω–∞–∂–∞—Ç–æ–π –∫–Ω–æ–ø–∫–µ –≤ –ø–æ—Ä—è–¥–∫–µ —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è, —É–∫–∞–∑–∞–Ω–Ω–æ–º –≤—ã—à–µ. –§–∞–∫—Ç –Ω–∞–∂–∞—Ç–∏—è –æ—Å—Ç–∞–ª—å–Ω—ã—Ö –∫–Ω–æ–ø–æ–∫ –ø—Ä–∏ —ç—Ç–æ–º –∏–≥–Ω–æ—Ä–∏—Ä—É–µ—Ç—Å—è. –î–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ —ç—Ç–æ–≥–æ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª–∞ –ú–ö –ø—Ä–æ–±—É–∂–¥–∞–µ—Ç—Å—è –∫–∞–∂–¥—ã–µ 30 –º—Å –∏ –≤—ã–ø–æ–ª–Ω—è–µ—Ç –∞–ª–≥–æ—Ä–∏—Ç–º –ø–æ–¥–∞–≤–ª–µ–Ω–∏—è –¥—Ä–µ–±–µ–∑–≥–∞ –∫–Ω–æ–ø–æ–∫. –ö–Ω–æ–ø–∫–∞ —Å—á–∏—Ç–∞–µ—Ç—Å—è —Ç–æ–ª—å–∫–æ —á—Ç–æ –Ω–∞–∂–∞—Ç–æ–π, –µ—Å–ª–∏ —ç—Ç–æ –µ—ë –Ω–æ–≤–æ–µ —Å–æ—Å—Ç–æ—è–Ω–∏–µ –ø–æ–¥—Ç–≤–µ—Ä–¥–∏–ª–æ—Å—å –Ω–∞ –ø—Ä–æ—Ç—è–∂–µ–Ω–∏–∏ –¥–≤—É—Ö –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω—ã—Ö –ø–µ—Ä–∏–æ–¥–æ–≤ —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –ø—Ä–∏ –≤—ã–±—Ä–∞–Ω–Ω—ã—Ö –ø–∞—Ä–∞–º–µ—Ç—Ä–∞—Ö —Ç—Ä–∞–∫—Ç–∞, –º–∏–Ω–∏–º–∞–ª—å–Ω—ã–π –ø–µ—Ä–∏–æ–¥ –ø–µ—Ä–µ–¥–∞—á–∏ –ø–∞–∫–µ—Ç–æ–≤ —Å–æ—Å—Ç–∞–≤–ª—è–µ—Ç 60 –º—Å, –≤ —Ç–æ –≤—Ä–µ–º—è –∫–∞–∫ —Å–∞–º–∞ –ø–µ—Ä–µ–¥–∞—á–∞ –ø–∞–∫–µ—Ç–∞ –º–æ–¥—É–ª–µ–º –∑–∞–Ω–∏–º–∞–µ—Ç –æ–∫–æ–ª–æ 46 –º—Å. –ù–∞ –ø—Ä–æ—Ç—è–∂–µ–Ω–∏–∏ —ç—Ç–æ–≥–æ –≤—Ä–µ–º–µ–Ω–∏ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ –º–æ–¥—É–ª—è —Å–æ—Å—Ç–∞–≤–ª—è–µ—Ç –ø–æ—Ä—è–¥–∫–∞ 22 –º–ê –ø—Ä–∏ –º–æ—â–Ω–æ—Å—Ç–∏ +13 dBm (20 mW). –ú–ö —Ç–∞–∫—Ç–∏—Ä—É–µ—Ç—Å—è –æ—Ç –≤–Ω—É—Ç—Ä–µ–Ω–Ω–µ–≥–æ –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–∞ —á–∞—Å—Ç–æ—Ç–æ–π 8 MHz –∏ —Ä–∞–±–æ—Ç–∞–µ—Ç –≤ —Ä–µ–∂–∏–º–µ VLPR (Very Low-Power Run) —Å –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ–º –æ–∫–æ–ª–æ 300 –º–∫–ê. –í —Ä–µ–∂–∏–º–µ —Å–Ω–∞ —Å —Ä–∞–±–æ—Ç–∞—é—à–∏–º –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–æ–º, —á—Ç–æ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –¥–ª—è –∞–≤—Ç–æ–Ω–æ–º–Ω–æ–π —Ä–∞–±–æ—Ç—ã –º–æ–¥—É–ª—è SPI, –º–µ–∂–¥—É –æ–±—Ä–∞–±–æ—Ç–∫–æ–π –Ω–∞–∂–∞—Ç–∏—è –∫–Ω–æ–ø–æ–∫ –µ–≥–æ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ —Å–Ω–∏–∂–∞–µ—Ç—Å—è –¥–æ 200 –º–∫–ê. –í —Ü–µ–ª–æ–º, –ø—Ä–∏ –ø–æ–¥–∞—á–µ –∫–æ–º–∞–Ω–¥ —Å –ø–µ—Ä–∏–æ–¥–æ–º 1 —Å–µ–∫ —Å—Ä–µ–¥–Ω–µ–µ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –≤—Å–µ–≥–æ –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ –Ω–µ –ø—Ä–µ–≤—ã—à–∞–µ—Ç 2 –º–ê. –ü–µ—Ä–µ–¥–∞—Ç—á–∏–∫ —Å–º–æ–Ω—Ç–∏—Ä–æ–≤–∞–Ω –Ω–∞ –æ–¥–Ω–æ—Å—Ç–æ—Ä–æ–Ω–Ω–µ–π –ø–ª–∞—Ç–µ —Ä–∞–∑–º–µ—Ä–æ–º 74×43 –º–º, —Ñ–∞–π–ª –¥–ª—è Eagle –∫–æ—Ç–æ—Ä–æ–π –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–∏. –í –∫–∞—á–µ—Å—Ç–≤–µ –∞–Ω—Ç–µ–Ω–Ω—ã –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω –æ—Ç—Ä–µ–∑–æ–∫ –æ–¥–Ω–æ–∂–∏–ª—å–Ω–æ–≥–æ –ø—Ä–æ–≤–æ–¥–∞ –¥–∏–∞–º–µ—Ç—Ä–æ–º 1–º–º –∏ –¥–ª–∏–Ω–æ–π 82 –º–º, —á—Ç–æ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç 1/4 –¥–ª–∏–Ω—ã –≤–æ–ª–Ω—ã –¥–ª—è —á–∞—Å—Ç–æ—Ç—ã 915 MHz. –ü–∏—Ç–∞–Ω–∏–µ –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –æ—Ç –¥–≤—É—Ö –±–∞—Ç–∞—Ä–µ–π —Ç–∏–ø–æ—Ä–∞–∑–º–µ—Ä–∞ –ê–êA. –Ý–∞–∑–º–µ—Ä—ã –ø–ª–∞—Ç—ã —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç –∏–º–µ—é—â–µ–º—É—Å—è –≤ —Ä–∞—Å–ø–æ—Ä—è–∂–µ–Ω–∏–∏ –ø–ª–∞—Å—Ç–∏–∫–æ–≤–æ–º—É –∫–æ—Ä–ø—É—Å—É. –í –ø—Ä–∞–≤–æ–π —á–∞—Å—Ç–∏ –ø–ª–∞—Ç—ã —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω –≤—ã–∫–ª—é—á–∞—Ç–µ–ª—å –ø–∏—Ç–∞–Ω–∏—è –ø–æ–ª–∑—É–Ω–∫–æ–≤–æ–≥–æ —Ç–∏–ø–∞ (–Ω–∞ —Å—Ö–µ–º–µ –Ω–µ –ø–æ–∫–∞–∑–∞–Ω).
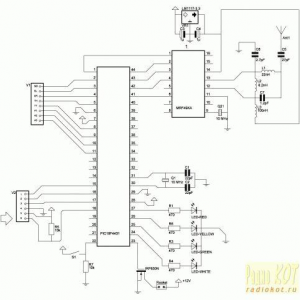
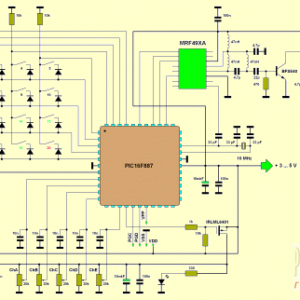
–ü—Ä–∏—ë–º–Ω–∏–∫ –°—Ö–µ–º–∞ –ø—Ä–∏—ë–º–Ω–∏–∫–∞ –≤—ã–ø–æ–ª–Ω–µ–Ω–∞ –Ω–∞ —Ç–∞–∫–æ–º-–∂–µ –º–æ–¥—É–ª–µ, –∫–∞–∫ –∏ –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫. –ö–∞–∫ —è —É–∂–µ —É–ø–æ–º–∏–Ω–∞–ª, –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å—Ö–µ–º—ã —Ç–æ–ª—å–∫–æ –≤ —Ä–µ–∂–∏–º–µ —Ä–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –∏–∑ –Ω–µ—ë –º–æ–∂–Ω–æ –∏—Å–∫–ª—é—á–∏—Ç—å IR-–ø—Ä–∏—ë–º–Ω–∏–∫–∏ IR1 –∏ IR2 —Å —Å–æ–ø—É—Ç—Å—Ç–≤—É—é—â–∏–º–∏ —ç–ª–µ–º–µ–Ω—Ç–∞–º–∏, –∞ —Ç–∞–∫–∂–µ —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä Q1 —Å –ø–æ–¥–∫–ª—é—á—ë–Ω–Ω—ã–º–∏ –∫ –Ω–µ–º—É —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞–º–∏. –≠—Ç–∏ —ç–ª–µ–º–µ–Ω—Ç—ã –æ—Å—Ç–∞–ª–∏—Å—å –≤ –ø—Ä–æ–µ–∫—Ç–µ –Ω–µ–∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω–Ω—ã–º–∏. –û–¥–Ω–∞–∫–æ –∑–∞—Ç–≤–æ—Ä —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä–∞ Q1 –ø–æ–¥–∫–ª—é—á—ë–Ω –∫ –≤—ã–≤–æ–¥—É –æ–¥–Ω–æ–≥–æ –∏–∑ —Ñ–æ—Ä–º–∏—Ä–æ–≤–∞—Ç–µ–ª–µ–π –®–ò–ú –≤ –ú–ö, –±–ª–∞–≥–æ–¥–∞—Ä—è —á–µ–º—É –ª–µ–≥–∫–æ –º–æ–∂–µ—Ç –±—ã—Ç—å —Å—Ñ–æ—Ä–º–∏—Ä–æ–≤–∞–Ω —Å–∏–≥–Ω–∞–ª —á–∞—Å—Ç–æ—Ç–æ–π, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–µ–π —Ä–∞–±–æ—á–µ–π —á–∞—Å—Ç–æ—Ç–µ IR-–ø—Ä–∏—ë–º–Ω–∏–∫–æ–≤. –í –æ—Ç–ª–∏—á–∏–∏ –æ—Ç –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞, —Å–æ–µ–¥–∏–Ω–µ–Ω–∏–µ –ø–∏–Ω–∞ 5 –º–æ–¥—É–ª—è —Å –ú–ö –≤ –¥–∞–Ω–Ω–æ–º —Å–ª—É—á–∞–µ —Å—É—â–µ—Å—Ç–≤–µ–Ω–Ω–æ. –ü—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ –ø–æ –ø–∞–¥–∞—é—â–µ–º—É —É—Ä–æ–≤–Ω—é —Å–∏–≥–Ω–∞–ª–∞ –Ω–∞ —ç—Ç–æ–º –ø–∏–Ω–µ, –∫–æ—Ç–æ—Ä–æ–µ, —Å–æ–≥–ª–∞—Å–Ω–æ –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏–∏ –ø—Ä–∏—ë–º–Ω–∏–∫–∞, –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –ø–æ—Å–ª–µ –ø—Ä–∏–Ω—è—Ç–∏—è –∏–º –ø–∞–∫–µ—Ç–∞ –¥–∞–Ω–Ω—ã—Ö, –ø—Ä–æ–±—É–∂–¥–∞–µ—Ç –ú–ö –∏–∑ —Å–Ω–∞ –¥–ª—è –ø—Ä–æ–≤–µ—Ä–∫–∏ –ø–∞–∫–µ—Ç–∞ –∏ –≤—ã–ø–æ–ª–Ω–µ–Ω–∏—è –ø—Ä–∏–Ω—è—Ç–æ–π –∫–æ–º–∞–Ω–¥—ã. –ü—Ä–æ–≤–µ—Ä–∫–∞ –ø—Ä–∏–Ω—è—Ç–æ–≥–æ –ø–∞–∫–µ—Ç–∞ –≤ –ø—Ä–æ–≥—Ä–∞–º–º–µ —Å–≤–æ–¥–∏—Ç—Å—è –∫ –ø—Ä–æ–≤–µ—Ä–∫–µ —Å–æ–≤–ø–∞–¥–µ–Ω–∏—è ID –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ –∏ –ø—Ä–∏—ë–º–Ω–∏–∫–∞ —Å 0xAA –∏ 0xBB, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ. –ü—Ä–æ–≤–µ—Ä–∫–∞ CRC –ø–∞–∫–µ—Ç–∞ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è —Ä–∞–¥–∏–æ-–º–æ–¥—É–ª–µ–º –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏. –£–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –º–æ—Ç–æ—Ä–∞–º–∏ –º–æ–¥–µ–ª–∏ –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è —Å –ø–æ–º–æ—â—å—é –¥—Ä–∞–π–≤–µ—Ä–∞ IC3. –ù–∞ –µ–≥–æ –≤—ã–≤–æ–¥—ã 9 –∏ 16 –ø–æ–¥–∞—ë—Ç—Å—è —Å–∏–≥–Ω–∞–ª –®–ò–ú, –≥–µ–Ω–µ—Ä–∏—Ä—É–µ–º—ã–π –ú–ö –Ω–∞ –∫–∞–Ω–∞–ª–∞—Ö 0 –∏ 1 —Ç–∞–π–º–µ—Ä–∞ TPM0. –ß–∞—Å—Ç–æ—Ç–∞ –®–ò–ú –æ–∫–æ–ª–æ 976 Hz –ø—Ä–∏ 12-–±–∏—Ç–Ω–æ–º —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–∏. –°–∫–≤–∞–∂–Ω–æ—Å—Ç—å –æ–±–æ–∏—Ö –∫–∞–Ω–∞–ª–æ–≤ –®–ò–ú —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–∞ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ–π –∏ —Ä–∞–≤–Ω–æ–π 50%. –û–¥–Ω–∞–∫–æ, –≤ –ø—Ä–æ–≥—Ä–∞–º–º–µ –∏–º–µ–µ—Ç—Å—è –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –Ω–µ–∑–∞–≤–∏—Å–∏–º–æ–π —É—Å—Ç–∞–Ω–æ–≤–∫–∏ —Å–∫–≤–∞–∂–Ω–æ—Å—Ç–∏ –∏ —Ç–µ–º —Å–∞–º—ã–º –∫–æ–º–ø–µ–Ω—Å–∞—Ü–∏–∏ —Ä–∞–∑–±—Ä–æ—Å–∞ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫ –º–æ—Ç–æ—Ä–æ–≤ –ø—Ä–∏ –¥–≤–∏–∂–µ–Ω–∏–∏ –º–æ–¥–µ–ª–∏ –ø–æ –ø—Ä—è–º–æ–π. –ü—Ä–∏ –ø–æ–ª—É—á–µ–Ω–∏–∏ –∫–æ–º–∞–Ω–¥—ã –°–¢–û–ü, –∞ —Ç–∞–∫–∂–µ —Å—Ä–∞–∑—É –ø–æ –≤–∫–ª—é—á–µ–Ω–∏–∏ –ø—Ä–∏—ë–º–Ω–∏–∫–∞, –≥–µ–Ω–µ—Ä–∞—Ü–∏—è –®–ò–ú –Ω–µ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è. –£–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º –≤—Ä–∞—â–µ–Ω–∏—è –º–æ—Ç–æ—Ä–æ–≤ –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è –ª–æ–≥–∏—á–µ—Å–∫–∏–º–∏ —É—Ä–æ–≤–Ω—è–º–∏ —Å–∏–≥–Ω–∞–ª–æ–≤ –Ω–∞ –≤—ã–≤–æ–¥–∞—Ö 10 –∏ 15 –¥—Ä–∞–π–≤–µ—Ä–∞ IC3. –ü—Ä–∏–º–µ–Ω–µ–Ω–∏–µ –¥—Ä–∞–π–≤–µ—Ä–∞ —Å –≤—ã—Ö–æ–¥–Ω—ã–º –∫–∞—Å–∫–∞–¥–æ–º –Ω–∞ –ö–ú–û–ü —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä–∞—Ö –ø—Ä–µ–¥–æ—Ç–≤—Ä–∞—â–∞–µ—Ç –µ–≥–æ –Ω–∞–≥—Ä–µ–≤. –î–µ—Ç–∞–ª–∏ –ø—Ä–∏—ë–º–Ω–∏–∫–∞ —Å–º–æ–Ω—Ç–∏—Ä–æ–≤–∞–Ω—ã –Ω–∞ –æ–¥–Ω–æ—Å—Ç–æ—Ä–æ–Ω–Ω–µ–π –ø–µ—á–∞—Ç–Ω–æ–π –ø–ª–∞—Ç–µ —Ä–∞–∑–º–µ—Ä–æ–º 61×39 –º–º. –í –∫–∞—á–µ—Å—Ç–≤–µ –∞–Ω—Ç–µ–Ω–Ω—ã —Ç–∞–∫–∂–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω –æ—Ç—Ä–µ–∑–æ–∫ –æ–¥–Ω–æ–∂–∏–ª—å–Ω–æ–≥–æ –ø—Ä–æ–≤–æ–¥–∞ –¥–ª–∏–Ω–æ–π 82 –º–º. –ü–∏—Ç–∞–Ω–∏–µ —Å—Ö–µ–º—ã –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –æ—Ç —á–µ—Ç—ã—Ä—ë—Ö —ç–ª–µ–º–µ–Ω—Ç–æ–≤ —Ç–∏–ø–æ—Ä–∞–∑–º–µ—Ä–∞ –ê–ê, –∫–æ–º–º—É—Ç–∏—Ä—É–µ–º—ã—Ö –ø–æ–ª–∑—É–Ω–∫–æ–≤—ã–º –≤—ã–∫–ª—é—á–∞—Ç–µ–ª–µ–º –≤ –ª–µ–≤–æ–º –Ω–∏–∂–Ω–µ–º —É–≥–ª—É –ø–ª–∞—Ç—ã. –ü–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ —Å—Ö–µ–º—ã –≤ —Ä–µ–∂–∏–º–µ –°–¢–û–ü –æ–∫–æ–ª–æ 12 –º–ê –ø—Ä–∏ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ —Ä–∞–±–æ—Ç–∞—é—â–∏–º –Ω–∞ –ø—Ä–∏—ë–º –º–æ–¥—É–ª–µ. –ë–∞—Ç–∞—Ä–µ—è –∏ –º–æ—Ç–æ—Ä—ã –ø–æ–¥–∫–ª—é—á–µ–Ω—ã –∫ –ø–ª–∞—Ç–µ —á–µ—Ä–µ–∑ –∫–ª–µ–º–Ω–∏–∫–∏ —Å –≤–∏–Ω—Ç–∞–º–∏ –Ω–∞ –µ—ë –æ–±—Ä–∞—Ç–Ω–æ–π —Å—Ç–æ—Ä–æ–Ω–µ. –≠—Ç–∏–º –¥–æ—Å—Ç–∏–≥–∞–µ—Ç—Å—è —É–¥–æ–±—Å—Ç–≤–æ –ø–µ—Ä–µ—É—Å—Ç–∞–Ω–æ–≤–∫–∏ –ø–ª–∞—Ç—ã –≤ —Å–ª—É—á–∞–µ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏ –Ω–∞ –¥—Ä—É–≥–æ–µ —à–∞—Å—Å–∏ –±–µ–∑ –ø–∞—è–ª—å–Ω–∏–∫–∞. –ö–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏—è —Ä–∞–¥–∏–æ-–º–æ–¥—É–ª–µ–π –ø—Ä–æ–∏–∑–≤–µ–¥–µ–Ω–∞ –≤ —Å–∏—Å—Ç–µ–º–µ WDS, –¥–æ—Å—Ç—É–ø–Ω–æ–π —Å –≤–µ–±—Å–∞–π—Ç–∞ —Ñ–∏—Ä–º—ã Silicon Labs. –ó–∞–≥—Ä—É–∑–∫–∞ –∫–æ–¥–∞ –≤ –ú–ö –≤ –ø—Ä–∏—ë–º–Ω–∏–∫–µ –∏ –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–µ –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è —á–µ—Ä–µ–∑ —Ä–∞–∑—ä—ë–º—ã SV1 –Ω–∞ —Å—Ö–µ–º–µ. –ü—Ä–æ–≥—Ä–∞–º–º—ã –æ—Ç–ª–∞–∂–µ–Ω—ã –≤ —Å—Ä–µ–¥–µ Keil µVision, –∏—Ö –∏—Å—Ö–æ–¥–Ω—ã–µ –∫–æ–¥—ã –ø—Ä–∏–ª–∞–≥–∞—é—Ç—Å—è. –¢–µ—Å—Ç –Ω–∞ –º–∞–∫—Å–∏–º–∞–ª—å–Ω—É—é –¥–∞–ª—å–Ω–æ—Å—Ç—å —Ä–∞–±–æ—Ç—ã —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –Ω–µ –ø—Ä–æ–∏–∑–≤–æ–¥–∏–ª—Å—è –ø–æ—Ç–æ–º—É, —á—Ç–æ –ø–æ—Å–ª–µ –≥–¥–µ-—Ç–æ 100–º –º–æ–¥–µ–ª—å —É–∂–µ –ø–ª–æ—Ö–æ —Ä–∞–∑–ª–∏—á–∏–º–∞ –Ω–∞ –º–µ—Å—Ç–Ω–æ—Å—Ç–∏ –Ω–µ–≤–æ–æ—Ä—É–∂—ë–Ω–Ω—ã–º –≥–ª–∞–∑–æ–º. –ü—Ä–∏ —Ç–∞–∫–æ–º —É–¥–∞–ª–µ–Ω–∏–∏ –æ—Ç –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ —Å–∏—Å—Ç–µ–º–∞ —Ä–∞–±–æ—Ç–∞–ª–∞ —É—Å—Ç–æ–π—á–∏–≤–æ, –ª–æ–∂–Ω—ã—Ö –∫–æ–º–∞–Ω–¥ –Ω–µ –Ω–∞–±–ª—é–¥–∞–ª–æ—Å—å. –ü—Ä–∏–Ω–∏–º–∞—è –≤–æ –≤–Ω–∏–º–∞–Ω–∏–µ –¥–∞–Ω–Ω—ã–µ —Ç–µ—Å—Ç–æ–≤ –≤ [2], —Å–ª–µ–¥—É–µ—Ç –æ–∂–∏–¥–∞—Ç—å –Ω–∞–¥—ë–∂–Ω—É—é —Ä–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∏—Å—Ç–µ–º—ã –Ω–∞ —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–∏ –≤ –Ω–µ—Å–∫–æ–ª—å–∫–æ —Å–æ—Ç–µ–Ω –º–µ—Ç—Ä–æ–≤. –õ–∏—Ç–µ—Ä–∞—Ç—É—Ä–∞ 1. 152984 DIY 2 Gear Motor Smart Car Chassis Kit
–§–∞–π–ª—ã: –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
–≠—Ç–∏ —Å—Ç–∞—Ç—å–∏ –≤–∞–º —Ç–æ–∂–µ –º–æ–≥—É—Ç –ø—Ä–∏–≥–æ–¥–∏—Ç—å—Å—è: |
|
||||||||||||||||||
 |
 |


 |
||||

|
||||


 –Ý–∞–±–æ—Ç–∞—Ç—å —Å –º–æ–¥—É–ª–µ–º ZETA –≤ —Ä–µ–∂–∏–º–µ –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ –æ—á–µ–Ω—å –ø—Ä–æ—Å—Ç–æ. –ü–æ –ø–æ–¥–∞—á–µ –ø–∏—Ç–∞–Ω–∏—è –≤ –Ω–µ–≥–æ —Å–ª–µ–¥—É–µ—Ç –∑–∞–≥—Ä—É–∑–∏—Ç—å –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏—é —á–∏–ø–∞. –ú—ã –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª–∏ —Å–ª–µ–¥—É—é—â–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –º–æ–¥–µ–º–∞: —á–∞—Å—Ç–æ—Ç–∞ 915 MHz, –º–æ–¥—É–ª—è—Ü–∏—è 2-FSK —Å –¥–µ–≤–∏–∞—Ü–∏–µ–π 30 KHz, —Å–∫–æ—Ä–æ—Å—Ç—å –ø–µ—Ä–µ–¥–∞—á–∏ 2.4 Kbps, –¥–ª–∏–Ω—ã –ø—Ä–µ–∞–º–±—É–ª—ã –∏ —Å–∏–Ω—Ö—Ä–æ—Å–ª–æ–≤–∞ –ø–æ 4 –±–∞–π—Ç–∞, –¥–ª–∏–Ω–∞ CRC - 2 –±–∞–π—Ç–∞. –û—Ç–º–µ—á—É, —á—Ç–æ –ø–æ–¥–æ–±–Ω—ã–µ –º–æ–¥—É–ª–∏ –≤—ã–ø—É—Å–∫–∞—é—Ç—Å—è —Ñ–∏—Ä–º–æ–π –∏ –¥–ª—è –¥–∏–∞–ø–∞–∑–æ–Ω–æ–≤ 433 –∏ 868 MHz. –ú–æ–¥—É–ª—å –æ–±—â–∞–µ—Ç—Å—è —Å –ú–ö –ø–æ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å—É SPI. –í –∫–∞—á–µ—Å—Ç–≤–µ –ú–ö –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª–∞—Å—å NXP –º–æ–¥–µ–ª—å —Å–µ–º–µ–π—Å—Ç–≤–∞ Kinetis –∞—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä—ã ARM Cortex-M0+. –ù–∞ –≤—ã–≤–æ–¥–∞—Ö PTA3, PTA4, –∏ PTB1 – PTB5 –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω—ã –≤–Ω—É—Ç—Ä–µ–Ω–Ω–∏–µ –ø–æ–¥—Ç—è–≥–∏–≤–∞—é—â–∏–µ —Ä–µ–∑–∏—Å—Ç–æ—Ä—ã.
–Ý–∞–±–æ—Ç–∞—Ç—å —Å –º–æ–¥—É–ª–µ–º ZETA –≤ —Ä–µ–∂–∏–º–µ –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ –æ—á–µ–Ω—å –ø—Ä–æ—Å—Ç–æ. –ü–æ –ø–æ–¥–∞—á–µ –ø–∏—Ç–∞–Ω–∏—è –≤ –Ω–µ–≥–æ —Å–ª–µ–¥—É–µ—Ç –∑–∞–≥—Ä—É–∑–∏—Ç—å –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏—é —á–∏–ø–∞. –ú—ã –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª–∏ —Å–ª–µ–¥—É—é—â–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –º–æ–¥–µ–º–∞: —á–∞—Å—Ç–æ—Ç–∞ 915 MHz, –º–æ–¥—É–ª—è—Ü–∏—è 2-FSK —Å –¥–µ–≤–∏–∞—Ü–∏–µ–π 30 KHz, —Å–∫–æ—Ä–æ—Å—Ç—å –ø–µ—Ä–µ–¥–∞—á–∏ 2.4 Kbps, –¥–ª–∏–Ω—ã –ø—Ä–µ–∞–º–±—É–ª—ã –∏ —Å–∏–Ω—Ö—Ä–æ—Å–ª–æ–≤–∞ –ø–æ 4 –±–∞–π—Ç–∞, –¥–ª–∏–Ω–∞ CRC - 2 –±–∞–π—Ç–∞. –û—Ç–º–µ—á—É, —á—Ç–æ –ø–æ–¥–æ–±–Ω—ã–µ –º–æ–¥—É–ª–∏ –≤—ã–ø—É—Å–∫–∞—é—Ç—Å—è —Ñ–∏—Ä–º–æ–π –∏ –¥–ª—è –¥–∏–∞–ø–∞–∑–æ–Ω–æ–≤ 433 –∏ 868 MHz. –ú–æ–¥—É–ª—å –æ–±—â–∞–µ—Ç—Å—è —Å –ú–ö –ø–æ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å—É SPI. –í –∫–∞—á–µ—Å—Ç–≤–µ –ú–ö –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª–∞—Å—å NXP –º–æ–¥–µ–ª—å —Å–µ–º–µ–π—Å—Ç–≤–∞ Kinetis –∞—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä—ã ARM Cortex-M0+. –ù–∞ –≤—ã–≤–æ–¥–∞—Ö PTA3, PTA4, –∏ PTB1 – PTB5 –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω—ã –≤–Ω—É—Ç—Ä–µ–Ω–Ω–∏–µ –ø–æ–¥—Ç—è–≥–∏–≤–∞—é—â–∏–µ —Ä–µ–∑–∏—Å—Ç–æ—Ä—ã.






–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026