 |
 |
|||||||||||||||
–Ý–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –°–∞–º–æ–ª–µ—Ç–æ–º –Ω–∞ MRF49XA
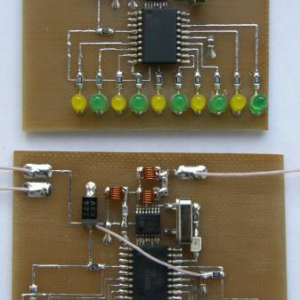
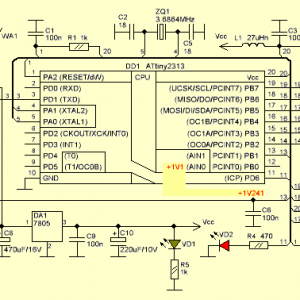
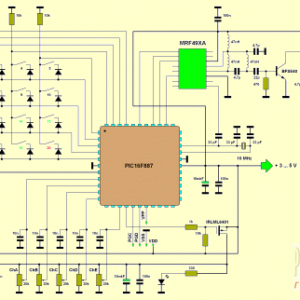
–ê–≤—Ç–æ—Ä: Ubermann, ubermann@yandex.ru –•–æ—á—É –ø–æ–¥–µ–ª–∏—Ç—å—Å—è —Å –≤–∞–º–∏ —Å–≤–æ–∏–º –æ–ø—ã—Ç–æ–º –≤ —Å–æ–∑–¥–∞–Ω–∏–∏ —Å–∞–º–æ–¥–µ–ª—å–Ω–æ–≥–æ —Ü–∏—Ñ—Ä–æ–≤–æ–≥–æ —Ä–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Å–∞–º–æ–¥–µ–ª—å–Ω—ã–º —Å–∞–º–æ–ª–µ—Ç–æ–º. –î–∞–Ω–Ω–∞—è —Å—Ç–∞—Ç—å—è –æ—Ä–∏–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω–∞ –ø—Ä–µ–∂–¥–µ –≤—Å–µ–≥–æ –Ω–∞ —Ç–µ—Ö, –∫—Ç–æ –Ω–µ–¥–∞–≤–Ω–æ –Ω–∞—á–∞–ª –∏–∑—É—á–∞—Ç—å –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã –∏ –∂–∞–∂–¥–µ—Ç —Å–∞–º–æ—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ —Å–æ–∑–¥–∞—Ç—å –ª–µ—Ç–∞—é—â—É—é –∏–≥—Ä—É—à–∫—É —Å –∏–Ω–¥–∏–≤–∏–¥—É–∞–ª—å–Ω—ã–º–∏ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—è–º–∏. –ö–∞–∫ –Ω–∞—á–∏–Ω–∞—é—â–µ–º—É —Ä–∞–¥–∏–æ–ª—é–±–∏—Ç–µ–ª—é –º–Ω–µ –µ—â–µ —Å–æ —à–∫–æ–ª—ã —Ö–æ—Ç–µ–ª–æ—Å—å –Ω–∞—É—á–∏—Ç—å—Å—è —Å–æ–∑–¥–∞–≤–∞—Ç—å —Ä–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ. –î–∞–Ω–Ω–∞—è –æ–±–ª–∞—Å—Ç—å –ø—Ä–∏–≤–ª–µ–∫–∞–ª–∞ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å—é —Å–≤–æ–∏–º–∏ —Ä—É–∫–∞–º–∏ —Å–æ–∑–¥–∞–≤–∞—Ç—å –∏–Ω—Ç–µ—Ä–µ—Å–Ω—ã–µ –∏–≥—Ä—É—à–∫–∏ —Å —Ä–µ–¥–∫–∏–º–∏ —Ñ—É–Ω–∫—Ü–∏—è–º–∏, –≤—Ä–æ–¥–µ –∑–∞–ø—É—Å–∫–∞ —Ä–∞–∫–µ—Ç—ã —Å –ª–æ–¥–∫–∏ –Ω–∞ –æ–∑–µ—Ä–µ, —ç–ª–µ–∫—Ç—Ä–æ–º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–æ–π —Ä—É–∫–∏ —É –º–∞—à–∏–Ω–∫–∏ –¥–ª—è –ø–µ—Ä–µ—Ç–∞—Å–∫–∏–≤–∞–Ω–∏—è –≥—Ä—É–∑–æ–≤, –∏–ª–∏ –µ—â–µ —á–µ–≥–æ. –ò—Ç–∞–∫, —á—Ç–æ –∂–µ –¥–æ–ª–∂–Ω–æ –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è—Ç—å –∏–∑ —Å–µ–±—è —Ä–∞–¥–∏–æ—É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ. –í–æ-–≤—Ç–æ—Ä—ã—Ö, –ø—É–ª—å—Ç —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –¥–æ–ª–∂–µ–Ω —É–º–µ—Ç—å –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤—ã–≤–∞—Ç—å –¥–≤–∏–∂–µ–Ω–∏—è —Ä—É–∫ –ø–∏–ª–æ—Ç–∞ –≤ —Ä–∞–¥–∏–æ–∫–æ–º–∞–Ω–¥—ã, (—Ç.–µ. –∫–æ–¥–∏—Ä–æ–≤–∞—Ç—å —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –ø–∏–ª–æ—Ç–∞) –∞ –±–æ—Ä—Ç–æ–≤–æ–π –ø—Ä–∏–µ–º–Ω–∏–∫ –ø–æ–Ω–∏–º–∞—Ç—å —ç—Ç–∏ –∫–æ–º–∞–Ω–¥—ã –∏ –Ω–∞ –∏—Ö –æ—Å–Ω–æ–≤–µ —É–ø—Ä–∞–≤–ª—è—Ç—å –º–æ—Ç–æ—Ä–∞–º–∏ (—Ç.–µ. –¥–µ–∫–æ–¥–∏—Ä–æ–≤–∞—Ç—å), –ª–∞–º–ø–æ—á–∫–∞–º–∏, –∏–ª–∏ –µ—â–µ —á–µ–º. <b>–í-—Ç—Ä–µ—Ç—å–∏—Ö</b>, –ø–æ–Ω–∏–º–∞—Ç—å –¥–≤–∏–∂–µ–Ω–∏—è —Ä—É–∫ —Ä—É–∫ –ø–∏–ª–æ—Ç–∞ –ø—É–ª—å—Ç –¥–æ–ª–∂–µ–Ω —á–µ—Ä–µ–∑ –¥–∂–æ–π—Å—Ç–∏–∫–∏ –∏ —Ä–µ–≥—É–ª—è—Ç–æ—Ä—ã (–≤—Ä–æ–¥–µ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö –ø—Ä–æ—Å—Ç—ã—Ö —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–≤). –î–∂–æ–π—Å—Ç–∏–∫–∏ –Ω—É–∂–Ω—ã –Ω–µ–ø–æ—Å—Ä–µ–¥—Å—Ç–≤–µ–Ω–Ω–æ –¥–ª—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –ø–æ–ª–æ–∂–µ–Ω–∏–µ–º —Ä—É–ª–µ–π —Å–∞–º–æ–ª–µ—Ç–∞, –∞ —Ä–µ–≥—É–ª—è—Ç–æ—Ä—ã –¥–ª—è –ø–æ–¥—Å—Ç—Ä–æ–π–∫–∏ —Å—Ä–µ–¥–Ω–∏—Ö –ø–æ–ª–æ–∂–µ–Ω–∏–π —ç—Ç–∏—Ö —Ä—É–ª–µ–π, —Ç.–µ. –ø–æ–ª–æ–∂–µ–Ω–∏–π, –≤ –∫–æ—Ç–æ—Ä—ã–µ –æ–Ω–∏ –≤—Å—Ç–∞—é—Ç, –∫–æ–≥–¥–∞ –ø–∏–ª–æ—Ç –æ—Ç–ø—É—Å–∫–∞–µ—Ç –¥–∂–æ–π—Å—Ç–∏–∫–∏. –ò–Ω–æ–≥–¥–∞ –≤–µ–¥—å –±—ã–≤–∞–µ—Ç, —á—Ç–æ —Ä—É–ª—å –ø—Ä–∏ –∏–∑–≥–æ—Ç–æ–≤–ª–µ–Ω–∏–∏ –Ω–∞—Å—Ç—Ä–æ–µ–Ω –Ω–µ –∏–¥–µ–∞–ª—å–Ω–æ, –∏ –Ω–µ–º–Ω–ær–æ –ø—Ä–∏–ø–æ–¥–Ω—è—Ç –∏–ª–∏ –æ–ø—É—â–µ–Ω, –ª–∏–±–æ –≤ –ø–æ–ª–µ—Ç–µ –≤—ã—è—Å–Ω—è–µ—Ç—Å—è, —á—Ç–æ —Å–∞–º–æ–ª–µ—Ç –Ω–µ–º–Ω–æ–≥–æ –∫—Ä–µ–Ω–∏—Ç –≤ –∫–∞–∫—É—é-–Ω–∏–±—É–¥—å —Å—Ç–æ—Ä–æ–Ω—É, –∏ —á—Ç–æ–±—ã –∫–æ–º–ø–µ–Ω—Å–∏—Ä–æ–≤–∞—Ç—å, –Ω–∞–¥–æ —á—É—Ç—å-—á—É—Ç—å –ø–æ–¥—Å—Ç—Ä–æ–∏—Ç—å —Ä—É–ª–∏. –í –∫–∞—á–µ—Å—Ç–≤–µ —É–Ω–∏–∫–∞–ª—å–Ω–æ–π —Ñ—É–Ω–∫—Ü–∏–∏, –∫–æ—Ç–æ—Ä—ã—Ö –Ω–µ –Ω–∞–π–¥–µ—à—å –≤ –º–∞–≥–∞–∑–∏–Ω–Ω—ã—Ö —Å–∞–º–æ–ª–µ—Ç–∞—Ö, —è —Ä–µ—à–∏–ª —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å —Ñ—É–Ω–∫—Ü–∏—é –ø—É—Å–∫–∞ —Ä–∞–∫–µ—Ç—ã —Å —Å–∞–º–æ–ª–µ—Ç–∞. –î–ª—è —ç—Ç–æ–≥–æ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –Ω–∞ —Å–µ–∫—É–Ω–¥—É –æ—Ç–∫—Ä—ã—Ç—å –º–æ—â–Ω—ã–π —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä, –∏ –ø—É—Å—Ç–∏—Ç—å –±–æ–ª—å—à–æ–π —Ç–æ–∫ —Å –±–æ—Ä—Ç–æ–≤–æ–≥–æ –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–∞ –Ω–∞ –≤–æ—Å–ø–ª–∞–º–µ–Ω–∏—Ç–µ–ª—å. –í –∫–∞—á–µ—Å—Ç–≤–µ –≤–æ—Å–ø–ª–∞–º–µ–Ω–∏—Ç–µ–ª—è –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –∫—É—Å–æ—á–µ–∫ —Ç–æ–Ω–∫–æ–π –Ω–∏—Ö—Ä–æ–º–æ–≤–æ–π –Ω–∏—Ç–∏ (0.1-0.2 –º–º –∫–≤–∞–¥—Ä) –¥–ª–∏–Ω–æ–π –ø–∞—Ä—É —Å–∞–Ω—Ç–∏–º–µ—Ç—Ä–æ–≤, –∏ –∑–∞–∫—Ä—É—á–µ–Ω–Ω–æ–π –≤ –ø—Ä—É–∂–∏–Ω–∫—É –Ω–∞ —à–≤–µ–π–Ω–æ–π –∏–≥–æ–ª–∫–µ (–≤ —Ñ–æ—Ä–º–µ –ø—Ä—É–∂–∏–Ω–∫–∏ –Ω–∞–º–Ω–æ–≥–æ –ª—É—á—à–µ –Ω–∞–≥—Ä–µ–≤–∞–µ—Ç—Å—è). –ö–æ–≥–¥–∞ –Ω–∞–∂–∏–º–∞—é –∫–Ω–æ–ø–∫—É, —Ä–∞—Å–∫–∞–ª—è–µ—Ç—Å—è –¥–æ–∫—Ä–∞—Å–Ω–∞ –∏ –≤—ã–≥–æ—Ä–∞–µ—Ç. –§–∏—Ç–∏–ª—å –æ—Ç –∫–∏—Ç–∞–π—Å–∫–æ–π –ø–∏—Ä–æ—Ç–µ—Ö–Ω–∏—á–µ—Å–∫–æ–π —Ä–∞–∫–µ—Ç—ã –ø–æ–¥–∂–∏–≥–∞–µ—Ç –ª–µ–≥–∫–æ. –í –∫–∞—á–µ—Å—Ç–≤–µ —Ä–∞–∫–µ—Ç—ã –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –∫–∞–∫ —Ä–∞–∑ –∫–∏—Ç–∞–π—Å–∫—É—é –ø–∏—Ä–æ—Ç–µ—Ö–Ω–∏—á–µ—Å–∫—É—é. –¢—É—Ç —è, –ø—Ä–∞–≤–¥–∞, –µ—â–µ –Ω–µ –∏—Å–ø—ã—Ç—ã–≤–∞–ª —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª—å–Ω–æ—Å—Ç—å, –∏ –Ω–∏—á–µ–≥–æ –∏–∑ –æ–ø—ã—Ç–∞ —Å–∫–∞–∑–∞—Ç—å –Ω–µ –º–æ–≥—É. –û–¥–Ω–æ —Å–∫–∞–∂—É —Ç–æ—á–Ω–æ: –Ω–∞–¥–æ –±—ã—Ç—å –∫—Ä–∞–π–Ω–µ –æ—Å—Ç–æ—Ä–æ–∂–Ω—ã–º, —Ç.–∫. —Ä–∞–∫–µ—Ç–∞ —Å–æ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä–æ–º –ø–æ–ª–µ—Ç–∏—Ç —Ç–æ–ª—å–∫–æ –≤–≤–µ—Ä—Ö (–Ω–æ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä - —Ç—è–∂–µ–ª—ã–π –∏ –Ω–µ—É–¥–æ–±–Ω—ã–π –≥—Ä—É–∑ –¥–ª—è —Å–∞–º–æ–ª–µ—Ç–∞), –∞ –±–µ–∑ –Ω–µ–≥–æ –ø–æ–ª–µ—Ç–∏—Ç –ø–æ –Ω–µ–ø—Ä–µ–¥—Å–∫–∞–∑—É–µ–º–æ–π —Ç—Ä–∞–µ–∫—Ç–æ—Ä–∏–∏ (—ç—Ç–∏ —Ä–∞–∫–µ—Ç—ã –¥–µ–ª–∞—é—Ç –Ω–∞ –∫–æ–ª–µ–Ω–∫–µ –≤ –ö–∏—Ç–∞–µ, –∏ –Ω–∏–∫—Ç–æ –Ω–µ –≥–∞—Ä–∞–Ω—Ç–∏—Ä—É–µ—Ç, —á—Ç–æ —Å—Ç—Ä—É—è –≥–∞–∑–∞ –±—É–¥–µ—Ç —Ç–æ–ª–∫–∞—Ç—å —Ä–∞–∫–µ—Ç—É —Å—Ç—Ä–æ–≥–æ –ø—Ä—è–º–æ) –∏ –º–æ–∂–µ—Ç –ø—Ä–∏–≤–µ—Å—Ç–∏ –∫ —Å–∞–º—ã–º –Ω–µ–≥–∞—Ç–∏–≤–Ω—ã–º –ø–æ—Å–ª–µ–¥—Å—Ç–≤–∏—è–º. –ü–æ—ç—Ç–æ–º—É –Ω–µ —Å–æ–≤–µ—Ç—É—é —Å —ç—Ç–∏–º —Å–≤—è–∑—ã–≤–∞—Ç—å—Å—è. –û–¥–Ω–∞–∫–æ, –¥–∞–Ω–Ω—É—é —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª—å–Ω–æ—Å—Ç—å –º–æ–∂–Ω–æ –∑–∞–ø—Ä–æ—Å—Ç–æ –ø–µ—Ä–µ–¥–µ–ª–∞—Ç—å –ø–æ–¥ –º–µ—Ç–∞–Ω–∏–µ –º–∞–∫–µ—Ç–∞ –±–æ–º–±—ã –∏–ª–∏ –µ—â–µ —á–µ–≥–æ, –≥–¥–µ –≤ –∫–∞—á–µ—Å—Ç–≤–µ –Ω–∞–≥—Ä—É–∑–∫–∏ –±—É–¥–µ—Ç –∫–∞–∫–æ–π-–Ω–∏–±—É–¥—å –º–µ—Ö–∞–Ω–∏–∑–º –≤—Ä–æ–¥–µ, –Ω–∞–ø—Ä–∏–º–µ—Ä, —ç–ª–µ–∫—Ç—Ä–æ–º–∞–≥–Ω–∏—Ç–∞, –¥–µ—Ä–∂–∞—â–µ–≥–æ/–æ—Ç–ø—É—Å–∫–∞—é—â–µ–≥–æ –º–∞–∫–µ—Ç –±–æ–º–±—ã. –ü—Ä–∞–≤–¥–∞, –∏ —Ç—É—Ç –Ω–∞–¥–æ –±—ã—Ç—å –æ—Å—Ç–æ—Ä–æ–∂–Ω—ã–º, —Ç.–∫. –ø—Ä–∏ –æ—Ç–ø–∏—Ä–∞–Ω–∏–∏ —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä–∞ –ø—Ä–æ–∏–∑–æ–π–¥–µ—Ç –∫–æ—Ä–æ—Ç–∫–æ–µ –∑–∞–º—ã–∫–∞–Ω–∏–µ –±–æ—Ä—Ç–æ–≤–æ–≥–æ –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–∞. –ù–∞ –º–≥–Ω–æ–≤–µ–Ω–∏–µ —Ç–æ–∫ –±—É–¥–µ—Ç –æ–≥—Ä–∞–Ω–∏—á–µ–Ω –∑–∞ —Å—á–µ—Ç —Å–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏—è –º–∞–≥–Ω–∏—Ç–Ω–æ–≥–æ –ø–æ–ª—è —ç–ª–µ–∫—Ç—Ä–æ–º–∞–≥–Ω–∏—Ç–∞, –∞ –∑–∞—Ç–µ–º —Ç–æ–∫ —Ä–µ–∑–∫–æ –≤—ã—Ä–∞—Å—Ç–µ—Ç, –∏ –∑–∞–∫–æ–Ω—á–∏—Ç—Å—è –≤—Å–µ –ø–ª–æ—Ö–æ. –õ–∏–±–æ —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä —Å–≥–æ—Ä–∏—Ç –Ω–∞–ø—Ä–æ—á—å, –ª–∏–±–æ –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä –∏—Å–ø–æ—Ä—Ç–∏—Ç—Å—è, –∞ —Ç–æ –∏ —á–µ–≥–æ —Ö—É–∂–µ –≤–æ—Å–ø–ª–∞–º–µ–Ω–∏—Ç—Å—è –∏–ª–∏ –≤–∑–æ—Ä–≤–µ—Ç—Å—è (–∏–Ω–æ–≥–¥–∞ —Å–ª—É—á–∞–µ—Ç—Å—è —Å –ª–∏—Ç–∏–µ–≤–æ-–ø–æ–ª–∏–º–µ—Ä–Ω—ã–º–∏). –¢–∞–∫ —á—Ç–æ —Ç—É—Ç –Ω–∞–¥–æ –±—ã—Ç—å –∫—Ä–∞–π–Ω–µ –æ—Å—Ç–æ—Ä–æ–∂–Ω—ã–º... –°–•–ï–ú–´ –ê–ü–ü–ê–Ý–ê–¢–£–Ý–´: –ü—Ä–∏–µ–º–Ω–∏–∫: –ü—É–ª—å—Ç-–ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫: –ü—Ä–æ –æ–±–æ–∑–Ω–∞—á–µ–Ω–∏—è –Ω–∞ —Å—Ö–µ–º–µ: –î–∂–æ–π—Å—Ç–∏–∫ J1 —É–ø—Ä–∞–≤–ª—è–µ—Ç —ç–ª–µ—Ä–æ–Ω–∞–º–∏ –ø–æ –æ—Å–∏ X –∏ —Ä—É–ª–µ–º –≤—ã—Å–æ—Ç—ã –ø–æ –æ—Å–∏ Y. –î–∂–æ–π—Å—Ç–∏–∫ J2 —É–ø—Ä–∞–≤–ª—è–µ—Ç —Ä—É–ª–µ–º –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏—è –ø–æ –æ—Å–∏ X, –∞ –æ—Å—å Y –æ—Å—Ç–∞–ª–∞—Å—å –Ω–µ–∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–Ω–æ–π. –ö—Å—Ç–∞—Ç–∏, –∏–∑–Ω–∞—á–∞–ª—å–Ω–æ —è –ø—ã—Ç–∞–ª—Å—è —ç–∫–æ–Ω–æ–º–∏—Ç—å –Ω–∞ —Ä–∞–¥–∏–æ–ø–µ—Ä–µ–¥–∞—á–µ. –ò —Å–ª–∞–ª –ø–∞–∫–µ—Ç—ã —Ç–æ–ª—å–∫–æ –∫–æ–≥–¥–∞ –≤–µ–ª–∏—á–∏–Ω—ã –º–µ–Ω—è–ª–∏ —Å–≤–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ –Ω–∞ –∫–∞–∫–æ–µ-—Ç–æ –¥–µ–ª—å—Ç–∞ –æ—Ç –ø—Ä–µ–∂–Ω–µ–≥–æ. –ù–æ –ø–æ—Å–∫–æ–ª—å–∫—É –∏–Ω–æ–≥–¥–∞ –ø–∞–∫–µ—Ç—ã —Ç–µ—Ä—è—é—Ç—Å—è, —Ç–æ —Å–º–µ–Ω–∞ –ø–æ–ª–æ–∂–µ–Ω–∏—è –¥–∂–æ–π—Å—Ç–∏–∫–∞ –∏–ª–∏ —Ä—É—á–∫–∏ –º–æ–∂–µ—Ç –Ω–µ –¥–æ–π—Ç–∏ –¥–æ –ø—Ä–∏–µ–º–Ω–∏–∫–∞, –æ—Å–æ–±–µ–Ω–Ω–æ –Ω–∞ –±–æ–ª—å—à–æ–π –¥–∏—Å—Ç–∞–Ω—Ü–∏–∏ –æ—Ç –ø—É–ª—å—Ç–∞. –ü–æ—ç—Ç–æ–º—É —è —Ä–µ—à–∏–ª —Å–¥–µ–ª–∞—Ç—å –ø–æ-–ø—Ä–æ—Å—Ç–æ–º—É, –Ω–æ –±–æ–ª–µ–µ –Ω–∞–¥–µ–∂–Ω–æ. –ò –Ω–∞ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ —Ü–∏–∫–ª–∏—á–Ω–æ –∏–∑–º–µ—Ä—è—é—Ç—Å—è –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –Ω–∞ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞—Ö –∏ –¥–∂–æ–π—Å—Ç–∏–∫–∞—Ö –∏ —Å—Ä–∞–∑—É –∂–µ —à–ª—é—Ç—Å—è –Ω–∞ –ø—Ä–∏–µ–º–Ω–∏–∫, –Ω–µ –∑–∞–≤–∏—Å–∏–º–æ –æ—Ç —Ç–æ–≥–æ, –ø–æ–º–µ–Ω—è–ª–∏—Å—å –æ–Ω–∏ –∏–ª–∏ –Ω–µ—Ç. –≠—Ç–æ –ø–æ–≤—ã—à–∞–µ—Ç —Ç–æ—á–Ω–æ—Å—Ç—å –ø–æ–≤–æ—Ä–æ—Ç–∞ –º–æ—Ç–æ—Ä–æ–≤, —Å–∫–æ—Ä–æ—Å—Ç—å –∏—Ö —Ä–µ–∞–∫—Ü–∏–∏, –∏ –Ω–∞–¥–µ–∂–Ω–æ—Å—Ç—å –¥–æ—Å—Ç–∞–≤–∫–∏ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–∏ –¥–æ –ø—Ä–∏–µ–º–Ω–∏–∫–∞. –ü–∏—Ç–∞–Ω–∏–µ —Å—Ö–µ–º—ã –æ—Ç 9V Duracell –±–∞—Ç–∞—Ä–µ–π–∫–∏ —Ç–∏–ø–∞ "–ö—Ä–æ–Ω–∞". –ù–∞ –≤—Ö–æ–¥–µ —É –ø—É–ª—å—Ç–∞ —Å—Ç–æ–∏—Ç —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä LM78M05 –¥–ª—è –ø–∏—Ç–∞–Ω–∏—è —Å—Ö–µ–º—ã –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ–º –≤ 5 –≤–æ–ª—å—Ç. –ò —Ç–∞–∫–∂–µ LM1117-3.3 –¥–ª—è –ø–∏—Ç–∞–Ω–∏—è MRF49XA –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ–º –≤ 3.3 –≤–æ–ª—å—Ç–∞. –ö—Å—Ç–∞—Ç–∏, MRF49XA –¥–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ –≤–ø–æ–ª–Ω–µ –Ω–æ—Ä–º–∞–ª—å–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç –æ—Ç 5 –≤–æ–ª—å—Ç. –í –ø–µ—Ä–≤–æ–π –≤–µ—Ä—Å–∏–∏ –º–æ–µ–≥–æ –ø—Ä–∏–µ–º–Ω–∏–∫–∞ –æ–Ω –ø–∏—Ç–∞–ª—Å—è —Ç–∞–∫. –ò –¥–æ —Å–∏—Ö –ø–æ—Ä —Ä–∞–±–æ—Ç–∞–µ—Ç, —Å–∫–æ–ª—å–∫–æ —è –µ–≥–æ –Ω–µ –≥–æ–Ω—è–ª –ø–æ—Å–ª–µ–¥–Ω–∏–µ –ø–æ–ª–≥–æ–¥–∞. –ü–æ-—É–º–æ–ª—á–∞–Ω–∏—é —É MRF49XA –¥–≤—É—Ö–ø—Ä–æ–≤–æ–¥–Ω–∞—è –ª–∏–Ω–∏—è –ø–∏—Ç–∞–Ω–∏—è. –Ø –∂–µ –ø—Ä–æ—á–∏—Ç–∞–ª —Å—Ç–∞—Ç—å—é —Ç–æ–≤–∞—Ä–∏—â–∞ Blaze –∏ –µ—â–µ –≤–æ—Ç —ç—Ç—É , –∏ —Ä–µ—à–∏–ª –≤ –∫–∞—á–µ—Å—Ç–≤–µ –∞–Ω—Ç–µ–Ω–Ω—ã –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —à—Ç—ã—Ä—å. –í datasheet –æ–ø–∏—Å–∞–Ω –ø–µ—Ä–µ—Ö–æ–¥–Ω–∏–∫, —Ç–∞–∫ –Ω–∞–∑—ã–≤–∞–µ–º—ã–π Balun (–û—Ç —Å–ª–æ–≤ Balanced-Unbalanced), –æ—Ç –¥–≤—É—Ö–ø—Ä–æ–≤–æ–¥–Ω–æ–π –ª–∏–Ω–∏–∏ –ø–∏—Ç–∞–Ω–∏—è –∞–Ω—Ç–µ–Ω–Ω—ã –∫ –æ–¥–Ω–æ–ø—Ä–æ–≤–æ–¥–Ω–æ–π. –ü—Ä–∏ —ç—Ç–æ–º –Ω–∞–∏–ª—É—á—à–∏–µ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ –ø—Ä–∏–µ–º–∞-–ø–µ—Ä–µ–¥–∞—á–∏ –±—É–¥—É—Ç, –µ—Å–ª–∏ –∞–Ω—Ç–µ–Ω–Ω—ã –±—É–¥—É—Ç —Å –≤–æ–ª–Ω–æ–≤—ã–º —Å–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏–µ–º –≤ 50 –û–º. –ù–∞–∏–±–æ–ª–µ–µ –ø–æ–¥—Ö–æ–¥—è—â–µ–µ –∏ –ø—Ä–æ—Å—Ç–æ–µ —Ç—É—Ç, –Ω–∞ –º–æ–π –≤–∑–≥–ª—è–¥, —ç—Ç–æ —á–µ—Ç–≤–µ—Ä—Ç—å–≤–æ–ª–Ω–æ–≤–æ–π —à—Ç—ã—Ä—å. –ì–æ–≤–æ—Ä—è—Ç, —É –Ω–µ–≥–æ —Å–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏–µ –≥–¥–µ-—Ç–æ –æ–∫–æ–ª–æ 40 –û–º, –≤—Ä–æ–¥–µ. –î–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –±–ª–∏–∑–∫–æ.–∞ –Ω–µ—Å—É—â—É—é —á–∞—Å—Ç–æ—Ç—É –≤—ã–±—Ä–∞–ª –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω—É—é –¥–ª—è –¥–∞–Ω–Ω–æ–≥–æ —Ä–∞–¥–∏–æ—Ç—Ä–∞–Ω—Å–∏–≤–µ—Ä–∞, —Ç.–µ. 915 –ú–ì—Ü, —á—Ç–æ–±—ã –ø–æ –ø—Ä—è–º–æ–π –≤–∏–¥–∏–º–æ—Å—Ç–∏ –±–∏–ª–æ –¥–∞–ª—å—à–µ. –í–µ–¥—å, –∫–∞–∫ –∏–∑–≤–µ—Å—Ç–Ω–æ, —á–µ–º –≤—ã—à–µ —á–∞—Å—Ç–æ—Ç–∞, —Ç–µ–º –¥–∞–ª—å—à–µ –ª–æ–≤–∏—Ç—Å—è —Å–∏–≥–Ω–∞–ª –Ω–∞ –ø—Ä—è–º–æ–π –≤–∏–¥–∏–º–æ—Å—Ç–∏, –Ω–æ —Ö—É–∂–µ –ø—Ä–µ–æ–¥–æ–ª–µ–≤–∞–µ—Ç –ø—Ä–µ–ø—è—Ç—Å—Ç–≤–∏—è. –£–∫–∞–∑–∞–Ω–Ω—ã–µ –Ω–∞ —Å—Ö–µ–º–µ –∑–Ω–∞—á–µ–Ω–∏—è –¥–ª—è Balun –≤–∑—è—Ç—ã –∏–∑ datasheet. –í –∫–∞—á–µ—Å—Ç–≤–µ –∞–Ω—Ç–µ–Ω–Ω—ã –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª –∫—É—Å–æ–∫ –ø—Ä–æ–≤–æ–¥–∞ –¥–ª–∏–Ω–æ–π —á–µ—Ç–≤–µ—Ä—Ç—å –¥–ª–∏–Ω—ã –≤–æ–ª–Ω—ã. –î–ª—è 915 –ú–ì—Ü —ç—Ç–æ –æ–∫–æ–ª–æ 82 –º–º. –î–∞–ª–µ–µ... –ì–ª–∞–≤–Ω—ã–π –Ω–µ–¥–æ—Å—Ç–∞—Ç–æ–∫ MRF49XA, –Ω–∞ –º–æ–π –≤–∑–≥–ª—è–¥, —ç—Ç–æ –µ–≥–æ –º–∞–ª–µ–Ω—å–∫–∏–π –±—É—Ñ–µ—Ä –ø—Ä–∏–µ–º–∞ - –≤—Å–µ–≥–æ 2 –±–∞–π—Ç–∞. –î—É–º–∞—é, –∞–≤—Ç–æ—Ä—ã —á–∏–ø–∞ —Å—á–∏—Ç–∞–ª–∏, —á—Ç–æ –ø—Ä–∏ –ø—Ä–∏–µ–º–µ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –¥–æ–ª–∂–µ–Ω —Å—á–∏—Ç—ã–≤–∞—Ç—å –ø—Ä–∏—Ö–æ–¥—è—â–∏–π –ø–∞–∫–µ—Ç –ø–æ –±–∞–π—Ç—É-–¥–≤—É–º –∑–∞ —Ü–∏–∫–ª. –ù–æ –≤ –º–æ–µ–º —Å–ª—É—á–∞–µ —Å–∏—Ç—É–∞—Ü–∏—è —Å–ª–æ–∂–Ω–µ–µ. –®–ò–ú —è —Ä–µ–∞–ª–∏–∑–æ–≤–∞–ª –ª–æ–≥–∏—á–µ—Å–∫–∏ –ø—Ä–æ—Å—Ç—ã–º —Å–ø–æ—Å–æ–±–æ–º: —Å—Ç–∞–≤–∏–º –µ–¥–∏–Ω–∏—Ü—É –Ω–∞ –æ–¥–Ω—É –®–ò–ú-–Ω–æ–∂–∫—É, –∂–¥–µ–º –Ω—É–∂–Ω–æ–µ –≤—Ä–µ–º—è –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ —Å–∏–≥–Ω–∞–ª–∞, –∏ –ø–µ—Ä–µ–≤–æ–¥–∏–º –≤ –Ω–æ–ª—å, –∞ –∑–∞—Ç–µ–º —Å–ª–µ–¥—É—é—â—É—é –Ω–æ–∂–∫—É –∞–Ω–∞–ª–æ–≥–∏—á–Ω–æ, –∏ —Ç–∞–∫ –ø–æ —Ü–∏–∫–ª—É. –£–ø—Ä–∞–≤–ª—è—é—â–∏–π –®–ò–ú –¥–ª—è –º–æ—Ç–æ—Ä–æ–≤ –≤ –∫–ª–∞—Å—Å–∏—á–µ—Å–∫–æ–º –ø–æ–Ω–∏–º–∞–Ω–∏–∏ –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è–µ—Ç –∏–∑ —Å–µ–±—è —Ü–∏—Ñ—Ä–æ–≤–æ–π –∏–º–ø—É–ª—å—Å –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å—é –æ—Ç 1 –¥–æ 2 –º–∏–ª–ª–∏—Å–µ–∫—É–Ω–¥, –ø–æ–≤—Ç–æ—Ä—è—é—â–∏–π—Å—è —Å –ø–µ—Ä–∏–æ–¥–æ–º –≤ 20 –º–∏–ª–ª–∏—Å–µ–∫—É–Ω–¥. –ü–µ—Ä–∏–æ–¥ –º–æ–∂–µ—Ç –±—ã—Ç—å –¥—Ä—É–≥–∏–º. –ï—Å–ª–∏ –≤–∑—è—Ç—å –º–µ–Ω—å—à–∏–π, —Ç–æ –º–æ—Ç–æ—Ä—ã —á—É—Ç—å –±—ã—Å—Ç—Ä–µ–µ —Ä–µ–∞–≥–∏—Ä–æ–≤–∞—Ç—å –±—É–¥—É—Ç, –µ—Å–ª–∏ –ø–æ–±–æ–ª—å—à–µ, —Ç–æ –º–µ–¥–ª–µ–Ω–Ω–µ–µ. –ê –≤–æ—Ç –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å –∏–º–ø—É–ª—å—Å–∞ - —Ç–∞ —Å–∞–º–∞—è —É–ø—Ä–∞–≤–ª—è—é—â–∞—è –≤–µ–ª–∏—á–∏–Ω–∞. –¢–∞–∫ –≤–æ—Ç –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å –æ–¥–Ω–æ–≥–æ –≥–ª–∞–≤–Ω–æ–≥–æ —Ü–∏–∫–ª–∞ –º–µ–Ω—è–µ—Ç—Å—è –≤ –ø—Ä–µ–¥–µ–ª–∞—Ö –æ—Ç 5 –º–∏–ª–ª–∏—Å–µ–∫—É–Ω–¥ –¥–æ 10 –º–∏–ª–ª–∏—Å–µ–∫—É–Ω–¥ (5 –®–ò–ú-–Ω–æ–∂–µ–∫, –ø–æ 1-2 –º—Å–µ–∫ –Ω–∞ –∫–∞–∂–¥—É—é). –¢.–µ. –µ—Å–ª–∏ –ø—É–ª—å—Ç –±—É–¥–µ—Ç –ø–æ—Å—ã–ª–∞—Ç—å –±–∞–π—Ç—ã —á–∞—â–µ, —á–µ–º –ø–æ 2 –≤ 10 –º—Å–µ–∫, —Ç–æ —Å–∫–æ—Ä–µ–µ –≤—Å–µ–≥–æ –æ–Ω–∏ –±—É–¥—É—Ç —Ç–µ—Ä—è—Ç—å—Å—è. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –∑–∞ –æ–¥–∏–Ω —Ü–∏–∫–ª –º—ã –º–æ–∂–µ–º –ø–æ—Å—ã–ª–∞—Ç—å –Ω–µ –±–æ–ª–µ–µ 2-—Ö –±–∞–π—Ç. –°–Ω–∞—á–∞–ª–∞ —è —Ö–æ—Ç–µ–ª –ø–æ—Å—ã–ª–∞—Ç—å –ø–∞–∫–µ—Ç—ã –ø–æ 4 –±–∞–π—Ç–∞: –±–∞–π—Ç –Ω–æ–º–µ—Ä–∞ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ - —É–ø—Ä–æ—â–µ–Ω–Ω—ã–π –∞–Ω–∞–ª–æ–≥ IP –∞–¥—Ä–µ—Å–∞, –±–∞–π—Ç –Ω–æ–º–µ—Ä–∞ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª—å–Ω–æ—Å—Ç–∏ (–∫–æ—Ç–æ—Ä–æ–π –≤—ã—Å—Ç–∞–≤–ª—è–µ–º –∑–Ω–∞—á–µ–Ω–∏–µ), –±–∞–π—Ç —Å–∞–º–æ–≥–æ –∑–Ω–∞—á–µ–Ω–∏—è, –∏ –±–∞–π—Ç —á–µ–∫—Å—É–º–º—ã - —á–∏—Å–ª–æ –±–∏—Ç–æ–≤ –≤ –ø–µ—Ä–≤—ã—Ö —Ç—Ä–µ—Ö –±–∞–π—Ç–∞—Ö. –ù–æ –±–µ–∑—É—Å–ø–µ—à–Ω–æ –ø–æ–≤–æ–∑–∏–≤—à–∏—Å—å —Å —ç—Ç–æ–π –∑–∞—Ç–µ–µ–π, –∑–∞–±–∏–ª –∏ —Å–¥–µ–ª–∞–ª –ø—Ä–æ—Å—Ç–æ –ø–æ 2 –±–∞–π—Ç–∞: –±–∞–π—Ç –Ω–æ–º–µ—Ä–∞ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª—å–Ω–æ—Å—Ç–∏, –∏ –±–∞–π—Ç –∑–Ω–∞—á–µ–Ω–∏—è. –ö–∞—Å–∞—Ç–µ–ª—å–Ω–æ —Ç–µ–ª–µ–º–µ—Ç—Ä–∏–∏, –≤ —Å–ª—É—á–∞–µ –º–æ–µ–π –∞–ø–ø–∞—Ä–∞—Ç—É—Ä—ã –æ–∫–∞–∑–∞–ª–∞—Å—å –∫–∞–∫–∞—è-—Ç–æ –ø—Ä–æ–±–ª–µ–º–∞, –∫–æ—Ç–æ—Ä—É—é —è —Ç–∞–∫ –∏ –Ω–µ —Å–º–æ–≥ —Ä–∞–∑—Ä–µ—à–∏—Ç—å. –ü–∞–∫–µ—Ç—ã —Å –ø—Ä–∏–µ–º–Ω–∏–∫–∞ –Ω–∞ –ø—É–ª—å—Ç –ø—Ä–∏—Ö–æ–¥—è—Ç –∫—Ä–∏–≤—ã–µ. –ü—Ä–∏—á–µ–º, —è —Å–¥–µ–ª–∞–ª –¥–≤–∞ –ø—Ä–∏–µ–º–Ω–∏–∫–∞ –ø–æ —Ö–æ–¥—É —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏. –û–±–∞ –º–µ–∂–¥—É —Å–æ–±–æ–π —É—Å–ø–µ—à–Ω–æ –ø–µ—Ä–µ–¥–∞—é—Ç –ø–∞–∫–µ—Ç—ã –≤ –æ–±–µ —Å—Ç–æ—Ä–æ–Ω—ã. –ù–æ –Ω–∏ –æ–¥–∏–Ω –ø—É–ª—å—Ç—É –ø–∞–∫–µ—Ç –ø–µ—Ä–µ–¥–∞—Ç—å –Ω–µ –º–æ–∂–µ—Ç, —Ö–æ—Ç—è —Ñ—É–Ω–∫—Ü–∏–∏ –∏ –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ –∏—Å–ø–æ–ª—å–∑—É—é –≤ –ø—Ä–æ—à–∏–≤–∫–∞—Ö –æ–¥–∏–Ω–∞–∫–æ–≤—ã–µ. –ü–æ—Ä—Ç—ã –Ω–∞ –≤–≤–æ–¥-–≤—ã–≤–æ–¥ –≤—ã—Å—Ç–∞–≤–ª–µ–Ω—ã –ø—Ä–∞–≤–∏–ª—å–Ω–æ. –ê –≤–º–µ—Å—Ç–æ –ø–µ—Ä–≤–æ–≥–æ –±–∞–π—Ç–∞ –ø—Ä–∏—Ö–æ–¥–∏—Ç –≤—Å–µ–≥–¥–∞ –∫–∞–∫–æ–µ-—Ç–æ —á–∏—Å–ª–æ –±–æ–ª—å—à–µ 100, –Ω–æ –º–µ–Ω—å—à–µ 250. –ù–µ –∑–Ω–∞—é, —Å —á–µ–º —ç—Ç–æ —Å–≤—è–∑–∞–Ω–æ. –ù–æ –º–æ–¥—É–ª—å –ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫–∞ (–æ–Ω —É –º–µ–Ω—è –æ—Ç—Å–æ–µ–¥–∏–Ω—è–µ–º—ã–π) –¥–ª—è –ø—É–ª—å—Ç–∞ —è –º–µ–Ω—è–ª –æ–¥–Ω–∞–∂–¥—ã (—Å—Ç–∞—Ä—ã–π –≥–ª—é—á–∏—Ç—å —Å—Ç–∞–ª) –∏ –ø—Ä–æ–±–ª–µ–º–∞ –æ—Å—Ç–∞–ª–∞—Å—å. –í –æ–±—â–µ–º, –∑–∞–≥–∞–¥–∫–∞... –ü–µ—Ä–µ–¥–∞—á–∞ –ø–æ USB —Ç–∞–∫ –∂–µ –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è –∫–æ–º–∞–Ω–¥–∞–º–∏ –ø–æ 2 –±–∞–π—Ç–∞ –∞–Ω–∞–ª–æ–≥–∏—á–Ω–æ. –ó–Ω–∞—á–µ–Ω–∏—è —Ç–∞–∫–∂–µ –º–µ–Ω—è—é—Ç—Å—è –æ—Ç 0 –¥–æ 100, –∞ –Ω–æ–º–µ—Ä–∞ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª—å–Ω–æ—Å—Ç–µ–π –æ—Ç 0x60 –¥–æ 0x71. –ü—Ä–∞–≤–¥–∞, –∫–æ–¥–∏—Ä–æ–≤–∞–Ω–∏–µ –Ω—É–ª—è —Ç—É—Ç –æ—Ç—Å—É—Ç—Å—Ç–≤—É–µ—Ç - USB –∏ —Ç–∞–∫ –ø–µ—Ä–µ–¥–∞–µ—Ç –Ω–∞–¥–µ–∂–Ω–æ. –ü—Ä–æ—Ç–æ–∫–æ–ª –ø–µ—Ä–µ–¥–∞—á–∏ —è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª CDC. –ú–Ω–µ –ø–æ–Ω—Ä–∞–≤–∏–ª–∞—Å—å –∏–¥–µ—è –æ–±—â–∞—Ç—å—Å—è —Å —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ–º —á–µ—Ä–µ–∑ COM –ø–æ—Ä—Ç –Ω–∞ –∫–æ–º–ø–µ. –≠—Ç–æ —É–¥–æ–±–Ω–µ–µ, —á–µ–º —Å HID, –Ω–∞ –º–æ–π –≤–∑–≥–ª—è–¥. –û—Å–æ–±–µ–Ω–Ω–æ –∏–∑-–∑–∞ –Ω–µ—Å–ª–æ–∂–Ω–æ–π –ø—Ä–∏–≤—è–∑–∫–∏ –º–µ—Ç–æ–¥–æ–≤ –∫ event-–∞–º –ø—Ä–∏—Ö–æ–¥–∞ –Ω–∞ –∫–æ–º–ø –ø–∞–∫–µ—Ç–∞. –ü—Ä–æ–≥—É –¥–ª—è –∫–æ–º–ø–∞ –ø–∏—Å–∞–ª –Ω–∞ .NET —Å Windows Forms. –ì–ª–∞–≤–Ω—ã–π –Ω–µ–¥–æ—Å—Ç–∞—Ç–æ–∫ CDC —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ —ç—Ç–æ –Ω–∞–π—Ç–∏ –¥–ª—è –Ω–µ–≥–æ –¥—Ä–∞–π–≤–µ—Ä. –°–µ–±–µ –Ω–∞ –∫–æ–º–ø —è –∫–æ–≥–¥–∞-—Ç–æ –ø–æ—Å—Ç–∞–≤–∏–ª, –Ω–æ –≥–¥–µ –≤–∑—è–ª –∏ –∫–∞–∫ –¥–µ–ª–∞–ª, –Ω–µ –ø–æ–º–Ω—é. –°–µ–π—á–∞—Å –Ω–∞–π—Ç–∏ –Ω–µ –º–æ–≥—É... –í–æ—Ç —Ñ–æ—Ç–æ –ø–æ–ª—É—á–∏–≤—à–∏—Ö—Å—è —É—Å—Ç—Ä–æ–π—Å—Ç–≤. –ü—Ä–∏–µ–º–Ω–∏–∫: –ü—É–ª—å—Ç —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è: –ü—Ä–∞–≤–¥–∞, –ø—Ä–∏–µ–º–Ω–∏–∫ –Ω–∞ —Ñ–æ—Ç–æ –ø–µ—Ä–≤–æ–π –≤–µ—Ä—Å–∏–∏ - –Ω–∞ –Ω–µ–º –æ—Ç—Å—É—Ç—Å—Ç–≤—É–µ—Ç LM1117-3.3. –í—Ç–æ—Ä–æ–π –≤–µ—Ä—Å–∏–∏ —É–∂–µ —Å—Ç–æ–∏—Ç –Ω–∞ —Å–∞–º–æ–ª–µ—Ç–µ.:) –ü—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–ª –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã —è —á–µ—Ä–µ–∑ —Å–≤–æ–π Pickit3. –®—Ç—ã—Ä—å –Ω–∞ –¥–∂–æ–π—Å—Ç–∏–∫–µ —Å–¥–µ–ª–∞–Ω –¥–ª—è –±–æ–ª–µ–µ —Ç–æ—á–Ω–æ–≥–æ –∏ –ø–ª–∞–≤–Ω–æ–≥–æ –ø–æ–≤–æ—Ä–æ—Ç–∞. –°–ê–ú–û–õ–ï–¢: –°–æ—Å—Ç–∞–≤–Ω–∞—è —ç–ª–µ–∫—Ç—Ä–æ–Ω–Ω–∞—è —á–∞—Å—Ç—å —Å–∞–º–æ–ª–µ—Ç–∞: –°–∞–º–æ–ª–µ—Ç –ø–æ–ª—É—á–∏–ª—Å—è —Ç—è–∂–µ–ª–æ–≤–∞—Ç - 533 –≥—Ä–∞–º–º–∞. –ù–æ –º–æ—Ç–æ—Ä –Ω–∞ –º–∞–∫—Å–∏–º–∞–ª—å–Ω—ã—Ö –æ–±–æ—Ä–æ—Ç–∞—Ö –≤–ø–æ–ª–Ω–µ —Ç—è–Ω–µ—Ç –µ–≥–æ –≤–µ—Ä—Ç–∏–∫–∞–ª—å–Ω–æ –≤–≤–µ—Ä—Ö. –û–∫–æ—à–∫–æ –ø–µ—Ä–µ–¥ –ø—Ä–æ–ø–µ–ª–ª–µ—Ä–æ–º —Å–¥–µ–ª–∞–Ω–æ —Å–ø–µ—Ü–∏–∞–ª—å–Ω–æ –¥–ª—è –æ–±–¥—É–≤–∞ —Ä–∞–¥–∏–∞—Ç–æ—Ä–∞ –ø—Ä–∏–µ–º–Ω–∏–∫–∞ (–≥–¥–µ PIC18F4431 –≥—Ä–µ–µ—Ç—Å—è). –ó–ê–ú–ï–ß–ê–ù–ò–Ø –û–¢ –ê–í–¢–û–Ý–ê: 2) –ù–∞—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ —Ä–µ–∫–æ–º–µ–Ω–¥—É—é –Ω–µ –≤–æ–∑–∏—Ç—å—Å—è —Å —Ç–µ–º–∏ –¥–∂–æ–π—Å—Ç–∏–∫–∞–º–∏ –¥–ª—è Arduino, –∫–æ—Ç–æ—Ä—ã–µ —è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª. –û–Ω–∏ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –≥—Ä—É–±—ã –¥–ª—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Å–∞–º–æ–ª–µ—Ç–æ–º. –°–ª–æ–∂–Ω–æ —Å –Ω–∏–º–∏ —É–ø—Ä–∞–≤–ª—è—Ç—å. –õ—É—á—à–µ –∫—É–ø–∏—Ç–µ —Å–∞–º—ã–π –¥–µ—à–µ–≤—ã–π –ø—É–ª—å—Ç —Ä–∞–¥–∏–æ–∞–ø–ø–∞—Ä–∞—Ç—É—Ä—ã, –≤—ã—Ç–∞—â–∏—Ç–µ –æ—Ç—Ç—É–¥–∞ –Ω–∞—á–∏–Ω–∫—É, –∏ –∏—Å–ø–æ–ª—å–∑—É–π—Ç–µ –µ–≥–æ –∑–∞–º–µ—á–∞—Ç–µ–ª—å–Ω—ã–µ –¥–∂–æ–π—Å—Ç–∏–∫–∏. –¢–∞–º —Ç–æ—Ç –∂–µ —Å–∞–º—ã–π –ø—Ä–∏–Ω—Ü–∏–ø - –Ω–∞ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö —Ä–µ–∑–∏—Å—Ç–æ—Ä–∞—Ö. –ù–æ –∏–∑-–∑–∞ —Å–≤–æ–µ–π –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏ —ç—Ç–∏ –¥–∂–æ–π—Å—Ç–∏–∫–∏ –Ω–∞–º–Ω–æ–≥–æ —Ç–æ—á–Ω–µ–µ –∏ —É–¥–æ–±–Ω–µ–µ. –ö —Ç–æ–º—É –∂–µ, –∫–æ—Ä–æ–±–∫–∞ –ø—É–ª—å—Ç–∞ –±—É–¥–µ—Ç –Ω–µ–ø–ª–æ—Ö–∏–º –∫–æ—Ä–ø—É—Å–æ–º –¥–ª—è —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞. 3) –£–ø—Ä–∞–≤–ª—è—Ç—å —Å–∞–º–æ–ª–µ—Ç–æ–º —Å–ª–æ–∂–Ω–æ. –í –Ω–∞—à–µ –≤—Ä–µ–º—è —á–∞—Å—Ç–æ —Å—Ç–∞–≤—è—Ç –≥–∏—Ä–æ—Å–∫–æ–ø–∏—á–µ—Å–∫–∏–µ —Å—Ç–∞–±–∏–ª–∏–∑–∏—Ä—É—é—â–∏–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞. –ù–µ –ø—Ä–æ–±–æ–≤–∞–ª —Ç–∞–∫–æ–µ, –Ω–æ –¥—É–º–∞—é, –ø–æ–º–æ–∂–µ—Ç –≤ —Å—Ç–∞–±–∏–ª–∏–∑–∏—Ä–æ–≤–∞–Ω–∏–∏ —Å–∞–º–æ–ª–µ—Ç–∞ –≤ –≤–æ–∑–¥—É—Ö–µ. –°–æ–≤–µ—Ç—É—é –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å. 4) –£ –º–∞–≥–∞–∑–∏–Ω–Ω—ã—Ö —Å–∞–º–æ–ª–µ—Ç–æ–≤ –Ω–∞ –ø—É–ª—å—Ç–∞—Ö —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è, –∫–∞–∫ –ø—Ä–∞–≤–∏–ª–æ, –µ—Å—Ç—å —Å–ø–µ—Ü–∏–∞–ª—å–Ω—ã–π —Ä–∞–∑—ä–µ–º –¥–ª—è –ø–æ–¥–∫–ª—é—á–µ–Ω–∏—è –∫ –∫–æ–º–ø—É. –ß–µ—Ä–µ–∑ –ø—Ä–æ–≥—Ä–∞–º–º—É-—Å–∏–º—É–ª—è—Ç–æ—Ä –º–æ–∂–Ω–æ –ø–æ—Ç—Ä–µ–Ω–∏—Ä–æ–≤–∞—Ç—å—Å—è –Ω–∞ –≤–∏—Ä—Ç—É–∞–ª—å–Ω–æ–º —Å–∞–º–æ–ª–µ—Ç–µ –ø—Ä–µ–∂–¥–µ, —á–µ–º –∑–∞–ø—É—Å–∫–∞—Ç—å —Ä–µ–∞–ª—å–Ω—ã–π. –û—á–µ–Ω—å —É–¥–æ–±–Ω–æ –¥–ª—è –Ω–æ–≤–∏—á–∫–æ–≤. –û–¥–Ω–∞–∫–æ, –≤ —Å–∞–º–æ–¥–µ–ª—å–Ω–æ–π –∞–ø–ø–∞—Ä–∞—Ç—É—Ä–µ —è —Ç–∞–∫–æ–π —Ä–∞–∑—ä–µ–º –Ω–µ –ø—Ä–µ–¥—É—Å–º–æ—Ç—Ä–µ–ª. –í —ç—Ç–æ–º –±–æ–ª—å—à–æ–π –º–∏–Ω—É—Å —Å–≤–æ–µ–π –∞–ø–ø–∞—Ä–∞—Ç—É—Ä—ã - —Ç—Ä–µ–Ω–∏—Ä–æ–≤–∞—Ç—å—Å—è –ø—Ä–∏–¥–µ—Ç—Å—è –Ω–∞ —Ä–µ–∞–ª—å–Ω–æ–º —Å–∞–º–æ–ª–µ—Ç–µ –∏–∑–Ω–∞—á–∞–ª—å–Ω–æ. –ü–æ—ç—Ç–æ–º—É —Å–æ–≤–µ—Ç—É—é —Å–¥–µ–ª–∞—Ç—å —Å–∞–º–æ–ª–µ—Ç –ø–æ–ø—Ä–æ—â–µ, —á–µ–º –ø—Ä–µ–¥–ª–∞–≥–∞–µ—Ç –°–µ—Ä–≥–µ–π –®–µ–≤—ã—Ä–∏–Ω –∏ –ø–æ–º–µ–Ω—å—à–µ —Ä–∞–∑–º–µ—Ä–æ–º. –Ø —Å–¥–µ–ª–∞–ª —Å–∞–º–æ–ª–µ—Ç —Å —Ä–∞–∑–º–∞—Ö–æ–º –∫—Ä—ã–ª–∞ 110 —Å–∞–Ω—Ç–∏–º–µ—Ç—Ä–æ–≤, –∏ —Ç–µ–ø–µ—Ä—å –º—É—á–∞—é—Å—å –µ–≥–æ —á–∏–Ω–∏—Ç—å –ø–æ—Å–ª–µ –∫–∞–∂–¥–æ–≥–æ –Ω–µ–æ–ø—ã—Ç–Ω–æ–≥–æ –ø–æ–ª–µ—Ç–∞. 5) 28 –Ω–æ–∂–µ–∫ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ PIC18F2550 –º–∞–ª–æ–≤–∞—Ç–æ –¥–ª—è —Ç–æ–ª–∫–æ–≤–æ–≥–æ –ø—É–ª—å—Ç–∞. –Ý–µ–∫–æ–º–µ–Ω–¥—É—é –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –µ–≥–æ —Ä–∞—Å—à–∏—Ä–µ–Ω–Ω—ã–π –∞–Ω–∞–ª–æ–≥ PIC18F4550 —Å 44 –Ω–æ–∂–∫–∞–º–∏. –¢–æ–≥–¥–∞ –≤–º–µ—Å—Ç–æ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ –º–æ–∂–Ω–æ –±—É–¥–µ—Ç –ø—Ä–∏–∫—Ä—É—Ç–∏—Ç—å –ñ–ö –¥–∏—Å–ø–ª–µ–π, —Å–æ –≤—Å–µ–º–∏ –µ–≥–æ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—è–º–∏. –û—Ç–¥–µ–ª—å–Ω–æ —Ö–æ—á—É –∑–∞–º–µ—Ç–∏—Ç—å –ø—Ä–æ –Ω–µ–¥–æ—Å—Ç–∞—Ç–æ–∫ PIC18F2550. –£ –Ω–∏—Ö –æ—Ç—Å—É—Ç—Å—Ç–≤—É—é—Ç ANSEL-—Ä–µ–≥–∏—Å—Ç—Ä—ã. –ê –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏—è –∞–Ω–∞–ª–æ–≥–æ–≤—ã–π/—Ü–∏—Ñ—Ä–æ–≤–æ–π –¥–ª—è –ø–æ—Ä—Ç–æ–≤ –≤—ã—Å—Ç–∞–≤–ª—è–µ—Ç—Å—è —Å–ø–µ—Ü–∏—Ñ–∏—á–µ—Å–∫–∏–º —Å–ø–æ—Å–æ–±–æ–º, –∫–æ—Ç–æ—Ä—ã–π —Å–∏–ª—å–Ω–æ –æ–≥—Ä–∞–Ω–∏—á–∏–≤–∞–µ—Ç –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–∏ –ø–æ —Ä–∞–∑–º–µ—Ç–∫–µ –Ω–∞ –ø–ª–∞—Ç–µ. –ò–∑-–∑–∞ —ç—Ç–æ–≥–æ, –∫–∞–∫ –≤–∏–¥–Ω–æ –≤—ã—à–µ –Ω–∞ —Ñ–æ—Ç–æ, –ø—É–ª—å—Ç –ø—Ä–µ–≤—Ä–∞—â–∞–µ—Ç—Å—è –≤ "–≤–æ—Ä–æ–Ω—å–µ –≥–Ω–µ–∑–¥–æ" —Å –Ω–µ—É–¥–æ–±–Ω—ã–º –ø–µ—Ä–µ–ø–ª–µ—Ç–µ–Ω–∏–µ–º –ø—Ä–æ–≤–æ–¥–æ–≤. 6) –Ý–µ–≥—É–ª—è—Ç–æ—Ä—ã –ª—É—á—à–µ –¥–µ–ª–∞—Ç—å –∏–∑ –ª–∏–Ω–µ–π–Ω—ã—Ö –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–≤. –ù–µ —Å–æ–≤–µ—Ç—É—é –±—Ä–∞—Ç—å –∫–∏—Ç–∞–π—Å–∫–∏–µ, —É –∫–æ—Ç–æ—Ä—ã—Ö –µ—Å—Ç—å –≤—Å—Ç—Ä–æ–µ–Ω–Ω—ã–π –∑–∞–º–µ–¥–ª–∏—Ç–µ–ª—å –ø–æ–≤–æ—Ä–æ—Ç–∞ —Ä—É—á–∫–∏. –ë—ã—Å—Ç—Ä–æ –∏–∑–º–µ–Ω–∏—Ç—å –ø–æ–ª–æ–∂–µ–Ω–∏–µ –≤–æ –≤—Ä–µ–º—è –ø–æ–ª–µ—Ç–∞ –Ω–µ –ø–æ–ª—É—á–∏—Ç—Å—è. –ê –±—ã–≤–∞–µ—Ç –Ω—É–∂–Ω–æ –∏–Ω–æ–≥–¥–∞... 7) –ò–∑ –∑–∞–¥–∞—á –Ω–∞ –±—É–¥—É—â–µ–µ: –ù–∞–¥–µ—é—Å—å, –º–æ—è —Å—Ç–∞—Ç—å—è –æ–∫–∞–∑–∞–ª–∞—Å—å –∫–æ–º—É-–Ω–∏–±—É–¥—å –ø–æ–ª–µ–∑–Ω–æ–π. –í –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–∏ –¥–æ–±–∞–≤–ª—è—é –∫–æ–¥—ã –ø—Ä–æ—à–∏–≤–æ–∫ –ø—Ä–∏–µ–º–Ω–∏–∫–∞ –∏ –ø—É–ª—å—Ç–∞, –∫–æ–¥ –ø—Ä–æ–≥—Ä–∞–º–º—ã –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ –¥–ª—è –≤–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤–∏—è –∫ –ø—É–ª—å—Ç–æ–º –ø–æ—Å—Ä–µ–¥—Å—Ç–≤–æ–º USB, –∞ —Ç–∞–∫ –∂–µ —Ä–∞–∑–º–µ—Ç–∫—É –ø–ª–∞—Ç—ã –ø—Ä–∏–µ–º–Ω–∏–∫–∞. –ü–ª–∞—Ç–∞ –ø—É–ª—å—Ç–∞ –ø–æ–ª—É—á–∏–ª–∞—Å—å –Ω–µ –æ—á–µ–Ω—å —É–¥–∞—á–Ω–æ–π, –ø–æ—ç—Ç–æ–º—É —Ä–∞–∑–º–µ—Ç–∫—É –≤—ã–∫–ª–∞–¥—ã–≤–∞—Ç—å –Ω–µ –±—É–¥—É.
–§–∞–π–ª—ã: –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
–≠—Ç–∏ —Å—Ç–∞—Ç—å–∏ –≤–∞–º —Ç–æ–∂–µ –º–æ–≥—É—Ç –ø—Ä–∏–≥–æ–¥–∏—Ç—å—Å—è: |
|
|||||||||||||||
 |
 |


 |
||||

|
||||













–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026