Код: Выделить всё
// Accelerometer and gyroscope self test; check calibration wrt factory settings
bool self_test_impl() // Should return percent deviation from factory trim values, +/- 14 or less deviation is a pass
{
uint8_t raw_data[6] = {0, 0, 0, 0, 0, 0};
int32_t gAvg[3] = {0}, aAvg[3] = {0}, aSTAvg[3] = {0}, gSTAvg[3] = {0};
float factoryTrim[6];
uint8_t FS = 0;
writeByte(MPU6500_ADDRESS, SMPLRT_DIV, 0x00); // Set gyro sample rate to 1 kHz
writeByte(MPU6500_ADDRESS, CONFIG, 0x02); // Set gyro sample rate to 1 kHz and DLPF to 92 Hz
writeByte(MPU6500_ADDRESS, GYRO_CONFIG, FS << 3); // Set full scale range for the gyro to 250 dps
writeByte(MPU6500_ADDRESS, ACCEL_CONFIG2, 0x02); // Set accelerometer rate to 1 kHz and bandwidth to 92 Hz
writeByte(MPU6500_ADDRESS, ACCEL_CONFIG, FS << 3); // Set full scale range for the accelerometer to 2 g
for (int ii = 0; ii < 200; ii++) { // get average current values of gyro and acclerometer
readBytes(MPU6500_ADDRESS, ACCEL_XOUT_H, 6, &raw_data[0]); // Read the six raw data registers into data array
aAvg[0] += (int16_t)(((int16_t)raw_data[0] << 8) | raw_data[1]); // Turn the MSB and LSB into a signed 16-bit value
aAvg[1] += (int16_t)(((int16_t)raw_data[2] << 8) | raw_data[3]);
aAvg[2] += (int16_t)(((int16_t)raw_data[4] << 8) | raw_data[5]);
readBytes(MPU6500_ADDRESS, GYRO_XOUT_H, 6, &raw_data[0]); // Read the six raw data registers sequentially into data array
gAvg[0] += (int16_t)(((int16_t)raw_data[0] << 8) | raw_data[1]); // Turn the MSB and LSB into a signed 16-bit value
gAvg[1] += (int16_t)(((int16_t)raw_data[2] << 8) | raw_data[3]);
gAvg[2] += (int16_t)(((int16_t)raw_data[4] << 8) | raw_data[5]);
}
for (int ii = 0; ii < 3; ii++) { // Get average of 200 values and store as average current readings
aAvg[ii] /= 200;
gAvg[ii] /= 200;
}
// Configure the accelerometer for self-test
writeByte(MPU6500_ADDRESS, ACCEL_CONFIG, 0xE0); // Enable self test on all three axes and set accelerometer range to +/- 2 g
writeByte(MPU6500_ADDRESS, GYRO_CONFIG, 0xE0); // Enable self test on all three axes and set gyro range to +/- 250 degrees/s
delay(25); // Delay a while to let the device stabilize
for (int ii = 0; ii < 200; ii++) { // get average self-test values of gyro and acclerometer
readBytes(MPU6500_ADDRESS, ACCEL_XOUT_H, 6, &raw_data[0]); // Read the six raw data registers into data array
aSTAvg[0] += (int16_t)(((int16_t)raw_data[0] << 8) | raw_data[1]); // Turn the MSB and LSB into a signed 16-bit value
aSTAvg[1] += (int16_t)(((int16_t)raw_data[2] << 8) | raw_data[3]);
aSTAvg[2] += (int16_t)(((int16_t)raw_data[4] << 8) | raw_data[5]);
readBytes(MPU6500_ADDRESS, GYRO_XOUT_H, 6, &raw_data[0]); // Read the six raw data registers sequentially into data array
gSTAvg[0] += (int16_t)(((int16_t)raw_data[0] << 8) | raw_data[1]); // Turn the MSB and LSB into a signed 16-bit value
gSTAvg[1] += (int16_t)(((int16_t)raw_data[2] << 8) | raw_data[3]);
gSTAvg[2] += (int16_t)(((int16_t)raw_data[4] << 8) | raw_data[5]);
}
for (int ii = 0; ii < 3; ii++) { // Get average of 200 values and store as average self-test readings
aSTAvg[ii] /= 200;
gSTAvg[ii] /= 200;
}
// Configure the gyro and accelerometer for normal operation
writeByte(MPU6500_ADDRESS, ACCEL_CONFIG, 0x00);
writeByte(MPU6500_ADDRESS, GYRO_CONFIG, 0x00);
delay(25); // Delay a while to let the device stabilize
// Retrieve accelerometer and gyro factory Self-Test Code from USR_Reg
uint8_t self_test_data[6];
self_test_data[0] = readByte(MPU6500_ADDRESS, SELF_TEST_X_ACCEL); // X-axis accel self-test results
self_test_data[1] = readByte(MPU6500_ADDRESS, SELF_TEST_Y_ACCEL); // Y-axis accel self-test results
self_test_data[2] = readByte(MPU6500_ADDRESS, SELF_TEST_Z_ACCEL); // Z-axis accel self-test results
self_test_data[3] = readByte(MPU6500_ADDRESS, SELF_TEST_X_GYRO); // X-axis gyro self-test results
self_test_data[4] = readByte(MPU6500_ADDRESS, SELF_TEST_Y_GYRO); // Y-axis gyro self-test results
self_test_data[5] = readByte(MPU6500_ADDRESS, SELF_TEST_Z_GYRO); // Z-axis gyro self-test results
// Retrieve factory self-test value from self-test code reads
factoryTrim[0] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[0] - 1.0))); // FT[Xa] factory trim calculation
factoryTrim[1] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[1] - 1.0))); // FT[Ya] factory trim calculation
factoryTrim[2] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[2] - 1.0))); // FT[Za] factory trim calculation
factoryTrim[3] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[3] - 1.0))); // FT[Xg] factory trim calculation
factoryTrim[4] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[4] - 1.0))); // FT[Yg] factory trim calculation
factoryTrim[5] = (float)(2620 / 1 << FS) * (pow(1.01, ((float)self_test_data[5] - 1.0))); // FT[Zg] factory trim calculation
// Report results as a ratio of (STR - FT)/FT; the change from Factory Trim of the Self-Test Response
// To get percent, must multiply by 100
for (int i = 0; i < 3; i++) {
self_test_result[i] = 100.0 * ((float)(aSTAvg[i] - aAvg[i])) / factoryTrim[i] - 100.; // Report percent differences
self_test_result[i + 3] = 100.0 * ((float)(gSTAvg[i] - gAvg[i])) / factoryTrim[i + 3] - 100.; // Report percent differences
}
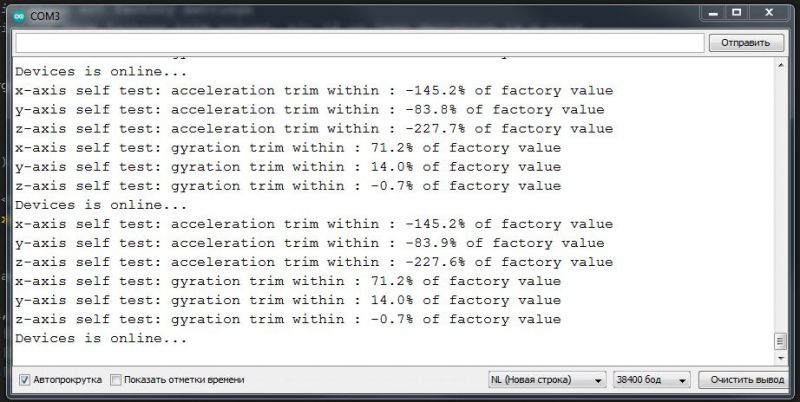
// Serial.print("x-axis self test: acceleration trim within : ");
// Serial.print(self_test_result[0], 1);
// Serial.println("% of factory value");
// Serial.print("y-axis self test: acceleration trim within : ");
// Serial.print(self_test_result[1], 1);
// Serial.println("% of factory value");
// Serial.print("z-axis self test: acceleration trim within : ");
// Serial.print(self_test_result[2], 1);
// Serial.println("% of factory value");
// Serial.print("x-axis self test: gyration trim within : ");
// Serial.print(self_test_result[3], 1);
// Serial.println("% of factory value");
// Serial.print("y-axis self test: gyration trim within : ");
// Serial.print(self_test_result[4], 1);
// Serial.println("% of factory value");
// Serial.print("z-axis self test: gyration trim within : ");
// Serial.print(self_test_result[5], 1);
// Serial.println("% of factory value");
bool b = true;
for (uint8_t i = 0; i < 6; ++i) {
b &= fabs(self_test_result[i]) <= 14.f;
}
return b;
}