–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 79 –∏–∑ 182
[ –°–æ–æ–±—â–µ–Ω–∏–π: 3623 ]
... , , , , , , ...
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Å–µ–Ω 12, 2017 16:52:50
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
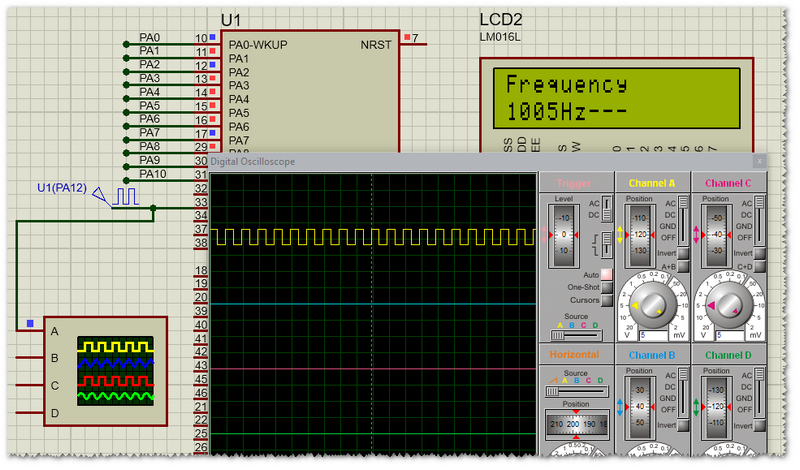
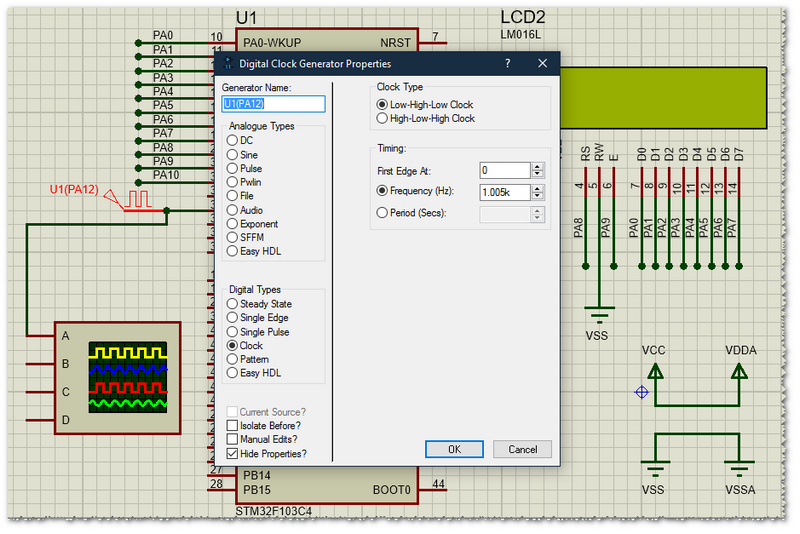
TIM3 —Ç–∞–∫ –∏–∑–Ω–∞—á–∞–ª—å–Ω–æ –∏ –ø–ª–∞–Ω–∏—Ä–æ–≤–∞–ª. –í—Å–µ –∂ –∏–∑ –¥–≤—É—Ö –æ—Å—Ç–∞–≤—à–∏—Ö—Å—è 16 –±–∏—Ç–Ω—ã—Ö —Ç–∞–π–º–µ—Ä–æ–≤ —Å–¥–µ–ª–∞–ª 32 –±–∏—Ç–Ω—ã–π - —Ä–∞–∑ –µ—Å—Ç—å —Ç–∞–∫–∞—è –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å - –Ω–∞–¥–æ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å, —É–ø—Ä–æ—â–∞–µ—Ç –∂ –≤—Å–µ. –ß–∞—Å—Ç–æ—Ç–æ–º–µ—Ä —É–¥–∞–ª—Å—è, —Ç–æ–ª—å–∫–æ –ø—Ä–æ—Ç–µ—É—Å –≤ –∫–æ–Ω—Ü–µ –ø–æ–¥–∫–∞—á–∞–ª - –Ω–∞ –≤—ã—Å–æ–∫–∏—Ö —á–∞—Å—Ç–æ—Ç–∞—Ö —Ç–æ—Ä–º–æ–∑–∏—Ç, –Ω–µ –∏–∑–º–µ—Ä—è–µ—Ç, –Ω–∞ –Ω–∏–∑–∫–∏—Ö –∏–∑–º–µ—Ä—è–µ—Ç. –í –ø—Ä–∏–Ω—Ü–∏–ø–µ –ø—Ä–æ—Ç–µ—É—Å–æ–º —á—Ç–æ-—Ç–æ –º–æ–∂–Ω–æ –ø–æ—Å–∏–º—É–ª–∏—Ä–æ–≤–∞—Ç—å, –≤—Å–µ –æ—Å—Ç–∞–ª—å–Ω–æ–µ –Ω–∞–¥–æ –≤ –∂–µ–ª–µ–∑–µ (–ª—É—á—à–µ —Å—Ä–∞–∑—É, –∫–∞–∫ –ø–æ–¥—Å–∫–∞–∑–∞–ª–∏).
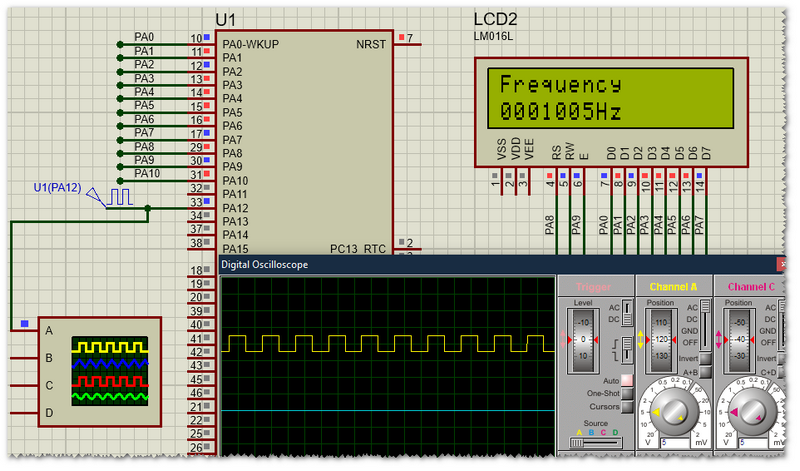
–ó–∞–¥–∞–µ–º —á–∞—Å—Ç–æ—Ç—É –≤—Ö–æ–¥–Ω—É—é 1005–ì—Ü:
–ò–∑–º–µ—Ä—è–µ–º –Ω–∞—à–∏–º —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–æ–º:
—Å–æ—Ñ—Ç–∏–∫:
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
#include "stm32f103x6.h"
–∑–∞–Ω—è–ª–æ: Program Size: Code=928 RO-data=268 RW-data=12 ZI-data=1044
–∑.—ã. "–≤–µ–ª–æ—Å–∏–ø–µ–¥" –∑–∞–Ω–æ–≤–æ –∏–∑–æ–±—Ä–µ—Ç–µ–Ω, —Ç–µ–ø–µ—Ä—å –º–µ–Ω—è –≤–æ–∑—å–º—É—Ç –Ω–∞ —Ä–∞–±–æ—Ç—É –Ω–∞ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–æ–ø—Ä–æ–∏–∑–≤–æ–¥—è—â—É—é —Ñ–∞–±—Ä–∏–∫—É
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Å–µ–Ω 12, 2017 17:43:32
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 2
–∑–∞–Ω—è–ª–æ: Program Size: Code=928 RO-data=268 RW-data=12 ZI-data=1044
–°—Ç—Ä–∞–Ω–Ω–∞—è —É —Ç–µ–±—è
itoa1 , –æ–±—ã—á–Ω–æ –¥–µ–ª–∞—é—Ç –ø–æ-–¥—Ä—É–≥–æ–º—É, —Ç–∞–∫, –Ω–∞–ø—Ä–∏–º–µ—Ä:
–ö–æ–¥:
const char* u32ToStr(uint32_t val)
–ù–∞ 120 –±–∞–π—Ç –º–µ–Ω—å—à–µ –ø–æ —Ä–∞–∑–º–µ—Ä—É –∏ –ø–µ—Ä–µ–∫—Ä—ã–≤–∞–µ—Ç –≤–µ—Å—å –¥–∏–∞–ø–∞–∑–æ–Ω —á–∏—Å–µ–ª.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Å–µ–Ω 12, 2017 18:03:56
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2135
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18454–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 2
Reflector –ø–∏—Å–∞–ª(–∞):
–ù–∞ 120 –±–∞–π—Ç –º–µ–Ω—å—à–µ –ø–æ —Ä–∞–∑–º–µ—Ä—É –∏ –ø–µ—Ä–µ–∫—Ä—ã–≤–∞–µ—Ç –≤–µ—Å—å –¥–∏–∞–ø–∞–∑–æ–Ω —á–∏—Å–µ–ª
–∏ —Ä–∞–±–æ—Ç–∞—Ç—å –Ω–µ –±—É–¥–µ—Ç. —Ç–æ–∂–µ –º–Ω–µ, –ø—Ä–æ–≥—Ä–∞–º–º–∏—Å—Ç...
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Å–µ–Ω 12, 2017 18:13:07
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
Reflector –ø–∏—Å–∞–ª(–∞):
–ù–∞ 120 –±–∞–π—Ç –º–µ–Ω—å—à–µ –ø–æ —Ä–∞–∑–º–µ—Ä—É –∏ –ø–µ—Ä–µ–∫—Ä—ã–≤–∞–µ—Ç –≤–µ—Å—å –¥–∏–∞–ø–∞–∑–æ–Ω —á–∏—Å–µ–ª
–∏ —Ä–∞–±–æ—Ç–∞—Ç—å –Ω–µ –±—É–¥–µ—Ç. —Ç–æ–∂–µ –º–Ω–µ, –ø—Ä–æ–≥—Ä–∞–º–º–∏—Å—Ç...
–¢—ã —Å–Ω–∞—á–∞–ª–∞ –ø—Ä–æ–≤–µ—Ä—å, —Ç–æ–∂–µ –º–Ω–µ, –∫—Ä–∏—Ç–∏–∫
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Å–µ–Ω 12, 2017 18:24:43
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—Ä–∞–±–æ—Ç–∞–µ—Ç
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
#include "stm32f103x6.h"
Program Size: Code=832 RO-data=268 RW-data=12 ZI-data=1036
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Å–µ–Ω 12, 2017 19:05:54
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2135
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18454–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
–ú–µ–¥–∞–ª–∏: 2
Reflector –ø–∏—Å–∞–ª(–∞):
–¢—ã —Å–Ω–∞—á–∞–ª–∞ –ø—Ä–æ–≤–µ—Ä—å, —Ç–æ–∂–µ –º–Ω–µ, –∫—Ä–∏—Ç–∏–∫
–º–æ–π –∫–æ—Å—è–∫, –ø—Ä–∏–∑–Ω–∞—é
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Å–µ–Ω 13, 2017 08:40:18
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ø–æ–∫–∞ –æ—Ç–≤–ª–µ—á–µ–º—Å—è –æ—Ç —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–æ–≤
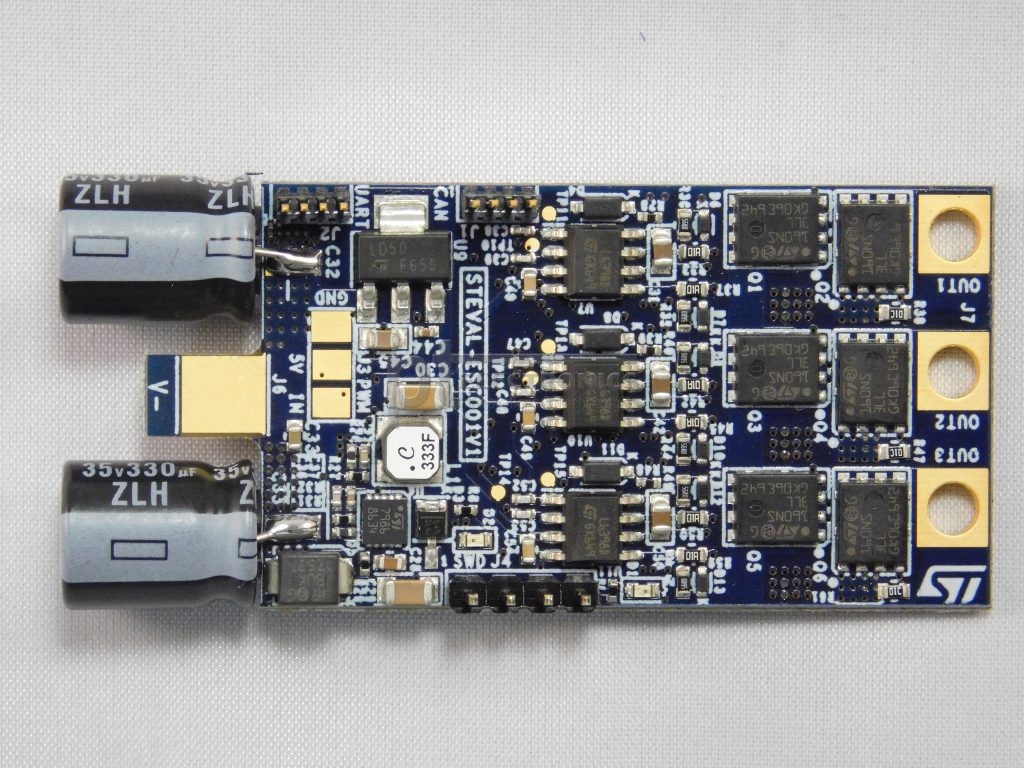
–ù–æ–≤—ã–π –æ–ø–æ—Ä–Ω—ã–π –¥–∏–∑–∞–π–Ω —ç–ª–µ–∫—Ç—Ä–æ–Ω–Ω–æ–≥–æ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ —Å–∫–æ—Ä–æ—Å—Ç–∏ –¥–ª—è —ç–ª–µ–∫—Ç—Ä–æ–¥–≤–∏–≥–∞—Ç–µ–ª–µ–π –¥—Ä–æ–Ω–æ–≤ –æ—Ç STMicroelectronics. –ù–æ–≤—ã–π –æ–ø–æ—Ä–Ω—ã–π –¥–∏–∑–∞–π–Ω STEVAL-ESC001V1 —ç–ª–µ–∫—Ç—Ä–æ–Ω–Ω–æ–≥–æ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ —Å–∫–æ—Ä–æ—Å—Ç–∏ –¥–ª—è –¥—Ä–æ–Ω–æ–≤ –ø—Ä–µ–¥–Ω–∞–∑–Ω–∞—á–µ–Ω –¥–ª—è –∫–æ–º–º–µ—Ä—á–µ—Å–∫–∏—Ö —Ä–∞–∑—Ä–∞–±–æ—Ç–æ–∫ –¥—Ä–æ–Ω–æ–≤ –Ω–∞—á–∞–ª—å–Ω–æ–≥–æ —É—Ä–æ–≤–Ω—è –∏ –º–æ–∂–µ—Ç —É–ø—Ä–∞–≤–ª—è—Ç—å –ª—é–±—ã–º —Ç—Ä–µ—Ö-—Ñ–∞–∑–Ω—ã–º –±–µ—Å–∫–æ–ª–ª–µ–∫—Ç–æ—Ä–Ω—ã–º(–≤–µ–Ω—Ç–∏–ª—å–Ω—ã–º) –¥–≤–∏–≥–∞—Ç–µ–ª–µ–º –ø—Ä–∏ –ø–∏—Ç–∞–Ω–∏–∏ –æ—Ç 6-—ç–ª–µ–º–µ–Ω—Ç–Ω–æ–≥–æ (22.2–í) LiPo –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–∞ –∏–ª–∏ –ª—é–±–æ–≥–æ —ç–∫–≤–∏–≤–∞–ª–µ–Ω—Ç–Ω–æ–≥–æ –∏—Å—Ç–æ—á–Ω–∏–∫–∞ –ø–∏—Ç–∞–Ω–∏—è —Å –ø–∏–∫–æ–≤—ã–º —Ç–æ–∫–æ–º –¥–æ 30 –ê.
Спойлер Дизайн STEVAL-ESC001V1 базируется на высокоэффективных MOSFET транзисторах STL160NS3LLH7 с низким сопротивлением канала, высокопроизводительном микроконтроллере ARM® Cortex®-M4 STM32F303CBT7 и высоковольтных драйверах L6398.
–ù–æ–≤—ã–π –æ–ø–æ—Ä–Ω—ã–π –¥–∏–∑–∞–π–Ω –ø–æ–∑–≤–æ–ª—è–µ—Ç –±—ã—Å—Ç—Ä–æ –Ω–∞—á–∞—Ç—å —Ä–∞–∑—Ä–∞–±–æ—Ç–∫—É –∏ –∑–∞–ø—É—Å—Ç–∏—Ç—å —ç–ª–µ–∫—Ç—Ä–æ–¥–≤–∏–≥–∞—Ç–µ–ª—å –±–ª–∞–≥–æ–¥–∞—Ä—è –º–∏–∫—Ä–æ–ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ–º—É –ø–∞–∫–µ—Ç—É STSW-ESC001V1, —Ä–µ–∞–ª–∏–∑—É—é—â–µ–º—É –±–µ–∑–¥–∞—Ç—á–∏–∫–æ–≤—ã–π –≤–µ–∫—Ç–æ—Ä–Ω—ã–π (FOC) –∞–ª–≥–æ—Ä–∏—Ç–º —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Å –∏–∑–º–µ—Ä–µ–Ω–∏–µ–º —Ñ–∞–∑–Ω—ã—Ö —Ç–æ–∫–æ–≤, —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º —Å–∫–æ—Ä–æ—Å—Ç—å—é –∏ –ø–æ–ª–Ω—ã–º –∞–∫—Ç–∏–≤–Ω—ã–º —Ç–æ—Ä–º–æ–∂–µ–Ω–∏–µ–º.
Опорный дизайн может принимать команды от блока управления полетом через ШИМ сигналы, UART, CAN или I²C.
–°—Ö–µ–º–∞ –æ–ø–æ—Ä–Ω–æ–≥–æ –¥–∏–∑–∞–π–Ω–∞ –∏–º–µ–µ—Ç —Ü–µ–ø–∏ –∑–∞—â–∏—Ç—ã (–¥–∞—Ç—á–∏–∫ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã, –∑–∞—â–∏—Ç–∞ –æ—Ç –ø–µ—Ä–µ–≥—Ä—É–∑–∫–∏ –ø–æ —Ç–æ–∫—É –∏ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—é) –∏ –º–æ–∂–µ—Ç –ø–∏—Ç–∞—Ç—å –æ—Ç –æ—Å–Ω–æ–≤–Ω–æ–π –±–∞—Ç–∞—Ä–µ–∏ –¥—Ä—É–≥–∏–µ —ç–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–µ —Å–∏—Å—Ç–µ–º—ã –¥—Ä–æ–Ω–∞ (5 –í, 0.5 –ê).
–ú–∏–∫—Ä–æ–ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–π –ø–∞–∫–µ—Ç STSW-ESC001V1 –º–æ–∂–µ—Ç –±—ã—Ç—å –¥–æ–ø–æ–ª–Ω–µ–Ω –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–º –ø–∞–∫–µ—Ç–æ–º —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ STSW-STM32100 –¥–ª—è –∫–∞—á–µ—Å—Ç–≤–µ–Ω–Ω–æ–π –∏ –±—ã—Å—Ç—Ä–æ–π –æ–ø—Ç–∏–º–∏–∑–∞—Ü–∏–∏ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —ç–ª–µ–∫—Ç—Ä–æ–¥–≤–∏–≥–∞—Ç–µ–ª–µ–º. –í–µ–∫—Ç–æ—Ä–Ω—ã–π –∞–ª–≥–æ—Ä–∏—Ç–º ST –±–µ–∑–¥–∞—Ç—á–∏–∫–æ–≤–æ–≥–æ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –≥–∞—Ä–∞–Ω—Ç–∏—Ä—É–µ—Ç –¥–ª–∏—Ç–µ–ª—å–Ω–æ–µ –≤—Ä–µ–º—è –ø–æ–ª–µ—Ç–∞ –∏ –æ–ø—Ç–∏–º–∞–ª—å–Ω—ã–π –¥–∏–Ω–∞–º–∏—á–µ—Å–∫–∏–µ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏.
STEVAL-ESC001V1 –¥–æ—Å—Ç—É–ø–µ–Ω –¥–ª—è –∑–∞–∫–∞–∑–∞. –î–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω—É—é –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é –º–æ–∂–Ω–æ –ø–æ–ª—É—á–∏—Ç—å –Ω–∞ —Å—Ç—Ä–∞–Ω–∏—á–∫–µ –ø—Ä–æ–¥—É–∫—Ç–∞.
http://www.st.com/content/st_com/en/pro ... 001v1.html
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Å–µ–Ω 15, 2017 15:54:08
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
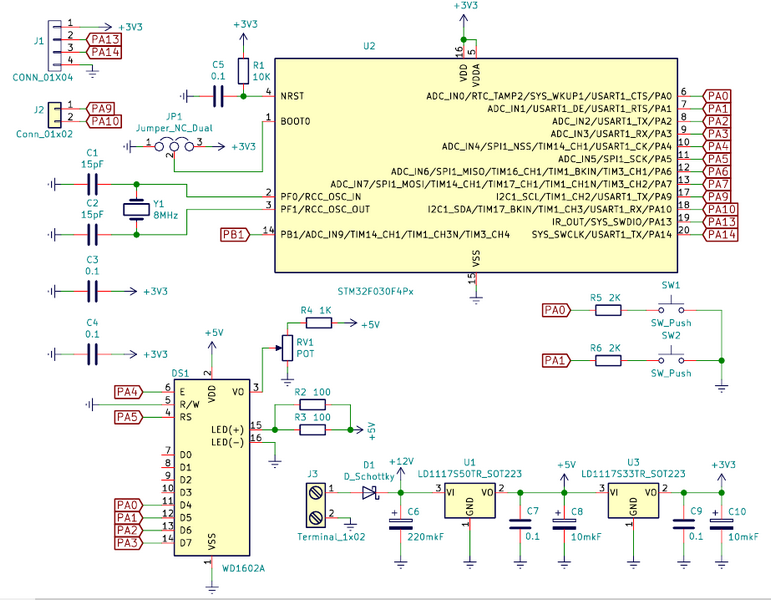
–Ω–∞—á–∞–ª —Å—Ö–µ–º–∫—É –±—É–¥—É—â–µ–≥–æ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–∞ –Ω–∞–±—Ä–∞—Å—ã–≤–∞—Ç—å, —É STM32F030F4P6 –ø–æ—Ö–æ–∂–µ –Ω–∏ –æ–¥–∏–Ω ETR –≤—ã–≤–æ–¥ —Å —Ç–∞–π–º–µ—Ä–æ–≤ –Ω–µ –≤—ã–≤–µ–¥–µ–Ω, –∑–∞—Å–∞–¥–∞...
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Å–µ–Ω 15, 2017 16:08:00
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
–Ω–∞—á–∞–ª —Å—Ö–µ–º–∫—É –±—É–¥—É—â–µ–≥–æ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–∞ –Ω–∞–±—Ä–∞—Å—ã–≤–∞—Ç—å, —É STM32F030F4P6 –ø–æ—Ö–æ–∂–µ –Ω–∏ –æ–¥–∏–Ω ETR –≤—ã–≤–æ–¥ —Å —Ç–∞–π–º–µ—Ä–æ–≤ –Ω–µ –≤—ã–≤–µ–¥–µ–Ω, –∑–∞—Å–∞–¥–∞...
F030F4 - —ç—Ç–æ –Ω–∞ —Å–∞–º–æ–º –¥–µ–ª–µ F031F6, —É –Ω–µ–≥–æ –µ—Å—Ç—å 32-–±–∏—Ç —Ç–∞–π–º–µ—Ä —Å ETR.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Å–µ–Ω 15, 2017 16:54:38
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
F030F4 - —ç—Ç–æ –Ω–∞ —Å–∞–º–æ–º –¥–µ–ª–µ F031F6
–¥–æ–∫—É–º–µ–Ω—Ç—ã —Ä–∞–∑–Ω—ã–µ –∏ f031 –¥–æ—Ä–æ–∂–µ
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Å–µ–Ω 15, 2017 17:26:58
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
–¥–æ–∫—É–º–µ–Ω—Ç—ã —Ä–∞–∑–Ω—ã–µ –∏ f031 –¥–æ—Ä–æ–∂–µ
–ò —á—Ç–æ? –ß–∏–ø—ã –æ—Ç–ª–∏—á–∞—é—Ç—Å—è —Ç–æ–ª—å–∫–æ –º–∞—Ä–∫–∏—Ä–æ–≤–∫–æ–π –∏ —Ç–µ–º —Ñ–∞–∫—Ç–æ–º, —á—Ç–æ –¥–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω–∞—è –ø–µ—Ä–∏—Ñ–µ—Ä–∏—è —Å–∫–æ—Ä–µ–µ –≤—Å–µ–≥–æ –Ω–µ —Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–ª–∞—Å—å, –Ω–æ –≤–µ—Ä–æ—è—Ç–Ω–æ—Å—Ç—å –Ω–∞—Ç–∫–Ω—É—Ç—å—Å—è –Ω–∞ –Ω–µ—Ä–∞–±–æ—á–∏–π —Ç–∞–π–º–µ—Ä –∫—Ä–∞–π–Ω–µ–π –º–∞–ª–∞, —Ç–∞–∫ —á—Ç–æ –º–æ–∂–Ω–æ —Å—á–∏—Ç–∞—Ç—å, —á—Ç–æ —ç—Ç–æ –ø–æ–ª–Ω–æ—Ü–µ–Ω–Ω—ã–π F031.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Å–µ–Ω 15, 2017 17:42:10
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∑–∞–≤—Ç—Ä–∞ –≤ –∂–∏–≤—É—é –ø–æ—â—É–ø–∞—é —Ç–∞–π–º–µ—Ä 32 –±–∏—Ç–Ω—ã–π F030F4 - –ø–ª–∞—Ç–∫—É –Ω–∞ –ø–æ—á—Ç–µ –ø–æ–ª—É—á—É —Ç–æ–ª—å–∫–æ...
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Å–µ–Ω 15, 2017 18:08:57
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∑–∞–≤—Ç—Ä–∞ –≤ –∂–∏–≤—É—é –ø–æ—â—É–ø–∞—é —Ç–∞–π–º–µ—Ä 32 –±–∏—Ç–Ω—ã–π F030F4 - –ø–ª–∞—Ç–∫—É –Ω–∞ –ø–æ—á—Ç–µ –ø–æ–ª—É—á—É —Ç–æ–ª—å–∫–æ...
–ò–º–µ–π –≤ –≤–∏–¥—É, —á—Ç–æ latency —Ç–∞–º —Ç–æ–∂–µ –º–æ–∂–Ω–æ –≤—ã—Å—Ç–∞–≤–ª—è—Ç—å –±–æ–ª—å—à–µ –¥–æ–∫—É–º–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö, –∏–Ω–∞—á–µ —Å–∏–ª—å–Ω–æ –Ω–µ —Ä–∞–∑–≥–æ–Ω–∏—à—å. –£ –º–µ–Ω—è —Ä–∞–±–æ—Ç–∞–ª–æ –Ω–∞ 96MHz –ø—Ä–∏ 2WS.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–ú—É—Ä–∏–∫
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Å–µ–Ω 15, 2017 19:44:40
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 179
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω –æ–∫—Ç 11, 2010 19:00:08–°–æ–æ–±—â–µ–Ω–∏–π: 3382
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
Reflector –ø–∏—Å–∞–ª(–∞):
–£ –º–µ–Ω—è —Ä–∞–±–æ—Ç–∞–ª–æ –Ω–∞ 96MHz –ø—Ä–∏ 2WS.
–°–æ–≥–ª–∞—Å–Ω–æ RM –º–æ–∂–µ—Ç –±—ã—Ç—å —Ç–æ–ª—å–∫–æ 001 - One wait state.
–°–ø–æ–π–ª–µ—Ä –í–ª–æ–∂–µ–Ω–∏–µ:
FLASH_ACR.png [69.71 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 140
–¢. –µ. 002 —Ç–æ–∂–µ –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ—Ç—Å—è?
–£ –º–µ–Ω—è F030F4 —Å—Ç–∞–±–∏–ª—å–Ω–æ —Ä–∞–±–æ—Ç–∞–ª –Ω–∞ 96 –ú–ì—Ü –∏ –ø—Ä–∏ 1WS.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Å–µ–Ω 15, 2017 20:31:39
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–°–æ–≥–ª–∞—Å–Ω–æ RM –º–æ–∂–µ—Ç –±—ã—Ç—å —Ç–æ–ª—å–∫–æ 001 - One wait state.
–¢. –µ. 002 —Ç–æ–∂–µ –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ—Ç—Å—è?
–£ –º–µ–Ω—è F030F4 —Å—Ç–∞–±–∏–ª—å–Ω–æ —Ä–∞–±–æ—Ç–∞–ª –Ω–∞ 96 –ú–ì—Ü –∏ –ø—Ä–∏ 1WS.
–£ –º–µ–Ω—è –≤ –∫–æ–¥–µ —Ç–æ—á–Ω–æ 2WS, –Ω–æ —Å–Ω–∞—á–∞–ª–∞ —è —Ç–æ–∂–µ –¥—É–º–∞–ª, —á—Ç–æ –º–æ–∂–Ω–æ –º–∞–∫—Å–∏–º—É–º 1WS –∏, –Ω–∞—Å–∫–æ–ª—å–∫–æ –ø–æ–º–Ω—é, –ø—Ä–∏ —Ä–∞–∑–≥–æ–Ω–µ –±—ã–ª–∏ –ø—Ä–æ–±–ª–µ–º—ã. –°–µ–π—á–∞—Å –∑–∞–ø—É—Å—Ç–∏–ª —Å 1WS, —Å–≤–µ—Ç–æ–¥–∏–æ–¥ –Ω–∞ 96MHz –º–æ—Ä–≥–∞–µ—Ç, –Ω–æ —ç—Ç–æ –¥—Ä—É–≥–æ–π –∫–∞–º–µ–Ω—å, –¥—Ä—É–≥–æ–µ –ø–∏—Ç–∞–Ω–∏–µ –∏ —Å–æ–≤—Å–µ–º –ø—Ä–æ—Å—Ç–∞—è –ø—Ä–æ–≥—Ä–∞–º–º–∞... –ê –≤—ã—Å—Ç–∞–≤–∏—Ç—å –º–æ–∂–Ω–æ –∏ 7WS, –ø—Ä–∏—á–µ–º –∏–º–µ–Ω–Ω–æ —Å—Ç–æ–ª—å–∫–æ –∏ –±—É–¥–µ—Ç, –ø—Ä–æ–≤–µ—Ä–∏—Ç—å –º–æ–∂–Ω–æ –∏–∑–º–µ—Ä—è—è —Ç–∞–π–º–µ—Ä–æ–º –≤—Ä–µ–º—è –≤—ã–ø–æ–ª–Ω–µ–Ω–∏—è –∫–∞–∫–æ–≥–æ-—Ç–æ –∫–æ–¥–∞ —Å —Ä–∞–∑–Ω—ã–º–∏ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞–º–∏ –ª–∞—Ç–µ–Ω—Ç–Ω–æ—Å—Ç–∏.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
a5021
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± —Å–µ–Ω 16, 2017 00:39:36
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 230
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç —Å–µ–Ω 13, 2013 13:11:31–°–æ–æ–±—â–µ–Ω–∏–π: 6452
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—Ç–∞–∫ —á—Ç–æ –º–æ–∂–Ω–æ —Å—á–∏—Ç–∞—Ç—å, —á—Ç–æ —ç—Ç–æ –ø–æ–ª–Ω–æ—Ü–µ–Ω–Ω—ã–π F031.
–í —Ç–æ–º, —á—Ç–æ —ç—Ç–æ —Ç–∞–∫, —Å–æ–≤—Å–µ–º –Ω–µ —Å–ª–æ–∂–Ω–æ —É–±–µ–¥–∏—Ç—å—Å—è –ª—é–±–æ–º—É –∂–µ–ª–∞—é—â–µ–º—É. –ù–∞–¥–æ –ø—Ä–æ—Å—Ç–æ –≤–∑—è—Ç—å F030F4P6, —Å–æ–∑–¥–∞—Ç—å –≤ –∫—É–±–µ –ø—Ä–æ–µ–∫—Ç –¥–ª—è F031F6P6, –∑–∞—é–∑–∞—Ç—å –ø–µ—Ä–∏—Ñ–µ—Ä–∏—é —Ç–æ—á–Ω–æ –æ—Ç—Å—É—Ç—Å—Ç–≤—É—é—â—É—é –≤ F030 –∏ –Ω–∞–±–ª—é–¥–∞—Ç—å, –∫–∞–∫ –æ–Ω–∞ —Ä–∞–±–æ—Ç–∞–µ—Ç, —Ö–æ—Ç—å –≤ –æ—Ç–ª–∞–¥—á–∏–∫–µ, —Ö–æ—Ç—å –≤ —Ä–µ–∞–ª—å–Ω–æ–º –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–∏. –ò —Ç–æ–≥–æ, —á–µ–º —è —Ä–µ–∞–ª—å–Ω–æ –ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è, —Ä–∞–±–æ—Ç–∞—é—Ç 32-–±–∏—Ç–Ω—ã–π —Ç–∞–π–º–µ—Ä, PVD, –±–µ–∫–∞–ø-—Ä–µ–≥–∏—Å—Ç—Ä—ã –∏ 32–∫ —Ñ–ª–µ—à–∞.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± —Å–µ–Ω 16, 2017 15:52:23
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¢–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ –¥–µ—à–µ–≤–æ–π –∫–∏—Ç–∞–π—Å–∫–æ–π –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç—ã –¥–ª—è STM32. –ù–∞ –ø–ª–∞—Ç–µ –ø—Ä–∏–ø–∞—è–Ω STM32F030F4P6 20 –Ω–æ–≥, —Ü–µ–Ω–æ–π 0.50$ —É –∫–∏—Ç–∞–π—Ü–µ–≤ –µ—Å–ª–∏ –æ–ø—Ç 50 —à—Ç., —É –Ω–∞—Å –≤ –±–∞–∑–∞—Ä–Ω–æ–º –ª–æ—Ç–∫–µ, –Ω–µ –æ—á–µ–Ω—å —Ç–æ –≤ —Ä–æ–∑–Ω–∏—Ü—É –∏ –¥–æ—Ä–æ–∂–µ. –í STM32F030F4P6 –ø–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –æ—Ç—Å—É—Ç—Å—Ç–≤—É–µ—Ç 32 –±–∏—Ç —Ç–∞–π–º–µ—Ä. –ù–æ –Ω–∞—à –Ω–∞—Ä–æ–¥ —É—Ç–≤–µ—Ä–∂–¥–∞–µ—Ç, —á—Ç–æ –≤–Ω—É—Ç—Ä–∏ —Ç–∞–∫–æ–π –∂–µ –∫—Ä–∏—Å—Ç–∞–ª–ª –∫–∞–∫ –∏ —É STM32F031F6, –∞ –≤ –Ω–µ–º –µ—Å—Ç—å 32 –±–∏—Ç —Ç–∞–π–º–µ—Ä, –∞ –µ—â–µ —Ñ–ª—ç—à–∞ 32–ö–±, –∞ –Ω–µ 16–ö–± –∏ —Ç.–¥.. –¢–∞–∫–æ–π —Ç–∞–π–º–µ—Ä–æ–∫ –Ω–∞–º –¥–ª—è —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–∞ –ø—Ä–∏–≥–æ–¥–∏—Ç—Å—è - –Ω—É –¥–ª—è –ª—é–±–∏—Ç–µ–ª—å—Å–∫–æ–≥–æ –∏–º—Ö–æ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –Ω–µ–¥–æ–∫—É–º–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω–Ω—ã–µ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–∏, –∞ –¥–ª—è –ø—Ä–æ—Ñ–∏ –Ω–µ –ø—Ä–æ–±–ª–µ–º–∞ - –≤–æ–∑—å–º–µ–º –ø—Ä–∞–≤–∏–ª—å–Ω—ã–π –∫—Ä–∏—Å—Ç–∞–ª–ª.
–Ý–∞–∑–Ω–∏—Ü—É –º–µ–∂–¥—É –∫—Ä–∏—Å—Ç–∞–ª–ª–∞–º–∏ —Å–º–æ—Ç—Ä–∏–º –Ω–∞ —Å—Ç—Ä–∞–Ω–∏—Ü–µ –ø—Ä–æ–¥—É–∫—Ç–∞ —É —Å–∞–º–æ–≥–æ ST (–∫–æ—Ä—è–≤—ã–π –ø–µ—Ä–µ–≤–æ–¥):
–¶–∏—Ç–∞—Ç–∞:
STM32F0x0 Value line –∏–º–µ–µ—Ç –≤—ã—Å–æ–∫—É—é –∫–æ–Ω–∫—É—Ä–µ–Ω—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å –Ω–∞ —Ç—Ä–∞–¥–∏—Ü–∏–æ–Ω–Ω—ã—Ö 8-–±–∏—Ç–Ω—ã—Ö –∏ 16-—Ä–∞–∑—Ä—è–¥–Ω—ã—Ö —Ä—ã–Ω–∫–∞—Ö –∏ —É—Å—Ç—Ä–∞–Ω—è–µ—Ç –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Ä–∞–∑–ª–∏—á–Ω—ã–º–∏ –∞—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞–º–∏ –∏ —Å–≤—è–∑–∞–Ω–Ω—ã–º–∏ —Å –Ω–∏–º–∏ —Ä–∞—Å—Ö–æ–¥–∞–º–∏ –Ω–∞ —Ä–∞–∑—Ä–∞–±–æ—Ç–∫—É. –ï—Å–ª–∏ –≤–∞—à–µ–º—É —É—Å—Ç—Ä–æ–π—Å—Ç–≤—É —Ç—Ä–µ–±—É–µ—Ç—Å—è –ø–µ—Ä–∏—Ñ–µ—Ä–∏–π–Ω–æ–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ USB, —Ç–µ–ø–µ—Ä—å –º–æ–∂–Ω–æ –∑–∞–∫–∞–∑–∞—Ç—å MCU –ª–∏–Ω–∏–∏ –ª–∏–Ω–∏–∏ STM32F070.
–ë—É–¥–µ–º, –∫–∞–∫ –≤—Å–µ–≥–¥–∞, —Å–æ–≥–ª–∞—Å–Ω–æ –ø–µ—Ä–µ–∏–º–µ–Ω–æ–≤–∞–Ω–Ω–æ–π —Ç–µ–º—ã –º–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º —Å –ø–æ–º–æ—â—å—é –Ω–µ–¥–æ–∫—É–º–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω–Ω–æ–≥–æ —Ç–∞–π–º–µ—Ä–∞.
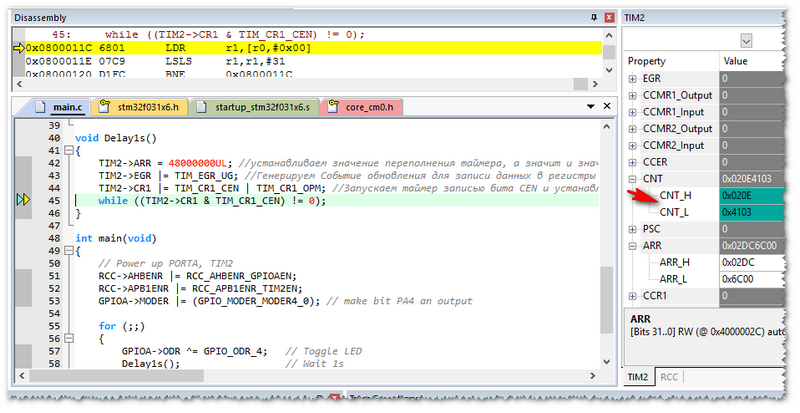
–ù–∞–ø–∏—à–µ–º —Å–æ—Ñ—Ç–∏–∫, –≥–¥–µ —Ñ—É–Ω–∫—Ü–∏—è –∑–∞–¥–µ—Ä–∂–∫–∏ —Å–¥–µ–ª–∞–Ω–∞ –Ω–∞ —Ç–∞–π–º–µ—Ä–µ TIM2 (–Ω–∞–ø–æ–º–Ω—é –¥–ª—è –∏—Å–ø—ã—Ç—É–µ–º–æ–≥–æ STM32F030F4P6 –ø–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –æ–Ω 16 –±–∏—Ç). –ü—Ä–æ–µ–∫—Ç –∫–æ–Ω–µ—á–Ω–æ –∂–µ –¥–ª—è STM32F031F6, –Ω–æ –ø–æ–¥—Å–æ–≤—ã–≤–∞–µ–º –≤ –æ—Ç–ª–∞–¥–∫—É STM32F030F4P6. –ù–∞ –ø–ª–∞—Ç–µ –ø—Ä–∏—Å—É—Ç—Å—Ç–≤—É–µ—Ç —Å–≤–µ—Ç–æ–¥–∏–æ–¥ –Ω–∞ PA4 –Ω–µ –Ω–∞ –∑–µ–º–ª—é, –∞ –Ω–∞ –ø–∏—Ç–∞–Ω–∏–µ, –ø–æ—ç—Ç–æ–º—É –≤—ã–≤–æ–¥ —Å–¥–µ–ª–∞–µ–º open-drain. –¢–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞–µ–º –æ—Ç —à—Ç–∞—Ç–Ω–æ–≥–æ –∫–≤–∞—Ä—Ü–∞ 8–ú–ì—Ü, PLL —É–º–Ω–æ–∂–∞–µ–º –Ω–∞ 6 - –ø–æ–∫–∞ —Ä–æ–¥–Ω—ã–µ 48–ú–ì—Ü, latency = 1. –¢–∞–π–º–µ—Ä –¥–æ–ª–∂–µ–Ω –ø–æ—Å—á–∏—Ç–∞—Ç—å 48000000 —Ç–∞–∫—Ç–æ–≤ - —ç—Ç–æ –∏–º—Ö–æ –Ω–µ 16-—Ç–∏ –±–∏—Ç–Ω–æ–µ —á–∏—Å–ª–æ.
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
#include "stm32f0xx.h"
–û—Ç–ª–∞–¥–∫—É –ø—Ä–æ–∏–∑–≤–æ–¥–∏–º —Å –ø–æ–º–æ—â—å—é –∫–∏—Ç–∞–π—Å–∫–æ–≥–æ ST-link –∑–∞ 2.5$ —ç—Ç–æ –≤–∞–º –Ω–µ –ü—Ä–æ—Ç–µ—É—Å (—Ç—Ä—É–¥–Ω–æ –ø–æ–Ω—è—Ç—å, –∫—Ç–æ –Ω–µ –ø—Ä–æ–±–æ–≤–∞–ª) - –Ω–∞ –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç–µ –ø—Ä–∏—Å—É—Ç—Å—Ç–≤—É–µ—Ç —É–¥–æ–±–Ω—ã–π —Ä–∞–∑—ä–µ–º –¥–ª—è –ø–æ–¥–∫–ª—é—á–µ–Ω–∏—è –æ—Ç–ª–∞–¥—á–∏–∫–∞.
–°–≤–µ—Ç–æ–¥–∏–æ–¥ –ø—Ä–∞–≤–∏–ª—å–Ω–æ (–Ω–∞ –≥–ª–∞–∑) –º–∏–≥–∞–µ—Ç.
–û —á—É–¥–æ - 16 –±–∏—Ç —Ç–∞–π–º–µ—Ä –Ω–∞ —Å–∞–º–æ–º –¥–µ–ª–µ 32 –±–∏—Ç:
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–ú—É—Ä–∏–∫
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± —Å–µ–Ω 16, 2017 16:53:13
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 179
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω –æ–∫—Ç 11, 2010 19:00:08–°–æ–æ–±—â–µ–Ω–∏–π: 3382
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
oleg110592 –ø–∏—Å–∞–ª(–∞):
–ù–∞–ø–∏—à–µ–º —Å–æ—Ñ—Ç–∏–∫, –≥–¥–µ —Ñ—É–Ω–∫—Ü–∏—è –∑–∞–¥–µ—Ä–∂–∫–∏ —Å–¥–µ–ª–∞–Ω–∞ –Ω–∞ —Ç–∞–π–º–µ—Ä–µ TIM2 (–Ω–∞–ø–æ–º–Ω—é –¥–ª—è –∏—Å–ø—ã—Ç—É–µ–º–æ–≥–æ STM32F030F4P6 –ø–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –æ–Ω 16 –±–∏—Ç).
–ü–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –µ–≥–æ –≤–æ–æ–±—â–µ –Ω–µ—Ç. –ö–∞–∫ –∏ –Ω–µ—Ç "–ª–∏—à–Ω–∏—Ö" 16 –ö–ë Flash (–ø–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ 16 –ö–ë, –∞ –≤ —Ä–µ–∞–ª—å–Ω–æ—Å—Ç–∏ 32 –ö–ë).
oleg110592 –ø–∏—Å–∞–ª(–∞):
–û —á—É–¥–æ - 16 –±–∏—Ç —Ç–∞–π–º–µ—Ä –Ω–∞ —Å–∞–º–æ–º –¥–µ–ª–µ 32 –±–∏—Ç
–ö–∞–∫ –ø–∏—Å–∞–ª –≤—ã—à–µ, –ø–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ TIM2 –≤ F030 –æ—Ç—Å—É—Ç—Å—Ç–≤—É–µ—Ç. –í –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –Ω–∞ –¥—Ä—É–≥–∏–µ –º–æ–¥–µ–ª–∏ –ú–ö (–Ω–∞–ø—Ä–∏–º–µ—Ä F031) –æ–Ω 32-—É—Ö –±–∏—Ç–Ω—ã–π.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± —Å–µ–Ω 16, 2017 17:35:13
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¶–∏—Ç–∞—Ç–∞:
–µ–≥–æ –≤–æ–æ–±—â–µ –Ω–µ—Ç
–¢–æ—á–Ω–æ - —Å–ø—É—Ç–∞–ª –Ω–∞ —Ä–∞–¥–æ—Å—Ç—è—Ö —Å TIM3 - –≤ –¥–æ–∫–µ –Ω–∞ F031 TIM2 –∏ TIM3 –≤ –æ–¥–Ω–æ–º —Ä–∞–∑–¥–µ–ª–µ. –¢–µ–º –±–æ–ª–µ–µ –ø—Ä–∏—è—Ç–Ω–æ –æ–±–Ω–∞—Ä—É–∂–∏—Ç—å —Ç–∞–π–º–µ—Ä, –∫–æ—Ç–æ—Ä–æ–≥–æ –Ω–µ—Ç.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
zöner
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Å–µ–Ω 17, 2017 12:27:57
–í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 30
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Ñ–µ–≤ 16, 2012 19:00:11–°–æ–æ–±—â–µ–Ω–∏–π: 502
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¶–∏—Ç–∞—Ç–∞:
oleg110592 –∞ –µ—â–µ —Ñ–ª—ç—à–∞ 32–ö–±, –∞ –Ω–µ 16–ö–± –∏ —Ç.–¥.
—É STM32F030F4P6 –ø–æ —Ñ–∞–∫—Ç—É —Ç–æ–∂–µ 32–ö —Ñ–ª–µ—à–∞, —Ç.–µ. —É –≤—Å–µ–π –ª–∏–Ω–µ–π–∫–∏ 32F030 - –æ–¥–∏–Ω –∫—Ä–∏—Å—Ç–∞–ª–ª
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 79 –∏–∑ 182
[ –°–æ–æ–±—â–µ–Ω–∏–π: 3623 ]
... , , , , , , ...
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 66
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è









")