–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1
[ –°–æ–æ–±—â–µ–Ω–∏–π: 17 ]
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 28, 2022 13:32:51
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 209
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 941–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–•–æ—á—É —Å–ø—Ä–æ—Å–∏—Ç—å —É —Å–æ–æ–±—â–µ—Å—Ç–≤–∞, –∫—Ç–æ –∏–º–µ–ª –¥–µ–ª–æ —Å —Ä–µ–≥—É–ª—è—Ç–æ—Ä–æ–º –Ω–∞ –Ω–µ—á—ë—Ç–∫–æ–π –ª–æ–≥–∏–∫–µ (Fuzzy logic regulator)?
–ö–∞–∫–∏–µ –≤–ø–µ—á–∞—Ç–ª–µ–Ω–∏—è?
–Ø –Ω–µ–¥–∞–≤–Ω–æ –∑–∞–Ω—è–ª—Å—è —ç—Ç–∏–º –≤–æ–ø—Ä–æ—Å–æ–º –∏ –ø—Ä–æ—Å—Ç–æ –≤ –≤–æ—Å—Ç–æ—Ä–≥–µ. –í –¥–≤—É—Ö –º–æ–∏—Ö –ø—Ä–æ–µ–∫—Ç–∞—Ö —Ä–µ–≥—É–ª—è—Ç–æ—Ä –Ω–∞ Fuzzy logic –ø–æ–ª–æ–∂–∏–ª –Ω–∞ –æ–±–µ –ª–æ–ø–∞—Ç–∫–∏ –ü–ò–î —Ä–µ–≥—É–ª—è—Ç–æ—Ä. –ü—Ä–∏—á—ë–º –Ω–∞—Å—Ç—Ä–æ–π–∫–∞ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ –Ω–∞ –Ω–µ—á—ë—Ç–∫–æ–π –ª–æ–≥–∏–∫–µ –æ–∫–∞–∑–∞–ª–∞—Å—å –Ω–∞ –ø–æ—Ä—è–¥–æ–∫ –ø—Ä–æ—â–µ –∏ –ø–æ–Ω—è—Ç–Ω–µ–µ.
–í
–º–æ—ë–º –±–ª–æ–≥–µ —è –æ–±—Ä–∏—Å–æ–≤–∞–ª —Å—Ä–∞–≤–Ω–µ–Ω–∏–µ –±–æ–ª–µ–µ –ø–æ–¥—Ä–æ–±–Ω–µ–µ, –Ω–æ —Ö–æ—á—É —Å–ø—Ä–æ—Å–∏—Ç—å, –µ—Å—Ç—å –ª–∏ –µ—â—ë –∫—Ç–æ-–Ω–∏–±—É–¥—å, –∫—Ç–æ –∑–∞–Ω–∏–º–∞–ª—Å—è –Ω–µ—á—ë—Ç–∫–æ–π –ª–æ–≥–∏–∫–æ–π?
–ò –ø–æ—á–µ–º—É –ø—Ä–∏ —Ç–∞–∫–∏—Ö –ø—Ä–µ–∏–º—É—â–µ—Å—Ç–≤–∞—Ö (–±—ã—Å—Ç—Ä–æ–µ —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞–Ω–∏–µ, –æ—Ç—Å—É—Ç—Å—Ç–≤–∏–µ –≤—ã–Ω—É–∂–¥–µ–Ω–Ω—ã—Ö –∫–æ–ª–µ–±–∞–Ω–∏–π, –ª—ë–≥–∫–æ—Å—Ç—å –Ω–∞—Å—Ç—Ä–æ–π–∫–∏) –Ω–µ—á—ë—Ç–∫–∞—è –ª–æ–≥–∏–∫–∞ –Ω–µ –∑–∞–º–µ–Ω–∏–ª–∞ –ü–ò–î –≤ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞—Ö —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞–Ω–∏—è?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
vlasovzloy
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 28, 2022 14:50:45
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 59
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2237
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —è–Ω–≤ 26, 2012 16:44:29–°–æ–æ–±—â–µ–Ω–∏–π: 19797–û—Ç–∫—É–¥–∞: –¢–∞–∫—Å–∏–º–æ
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü—Ä–æ–¥–æ–ª–∂–∞–π—Ç–µ –Ω–∞–±–ª—é–¥–µ–Ω–∏–µ. –ï—Å–ª–∏ –≤—Å–µ —Ç–∞–∫ –∫—Ä–∞—Å–∏–≤–æ —Ç–æ —ç—Ç–æ –ø–µ—Ä–µ–≤–æ—Ä–æ—Ç –ø—Ä–æ—Å—Ç–æ. –ö—Ä–æ–º–µ —à—É—Ç–æ–∫. –ê –ø–æ –∫–æ–¥—É, –±–æ–ª—å—à–µ –∏–ª–∏ –º–µ–Ω—å—à–µ —á–µ–º —É –ø–∏–¥ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
uldemir
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –º–∞—Ä 29, 2022 06:36:20
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 50
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1398
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∞–≤–≥ 28, 2009 21:34:30–°–æ–æ–±—â–µ–Ω–∏–π: 7328–û—Ç–∫—É–¥–∞: 845-–π –∫–º.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
Fuzzy –ª–æ–≥—Ç–∏–∫–æ–π –Ω–µ –∑–∞–Ω–∏–º–∞–ª—Å—è, –Ω–æ —á–∏—Ç–∞–ª –≤
–∫–Ω–∏–∂–∫–µ –í–∞–ª–≤–∞–Ω–æ (–∫–Ω–∏–∂–∫—É –Ω–µ —Ä–µ–∫–æ–º–µ–Ω–¥—É—é). –¢–∞–º –≤ 17-–π –≥–ª–∞–≤–µ –æ–±–∑–æ—Ä–Ω–æ —Ä–∞—Å—Å–º–æ—Ç—Ä–µ–Ω—ã —Ç–∏–ø—ã —Ä–µ–≥—É–ª—è—Ç–æ—Ä–æ–≤, –Ω–∞—á–∏–Ω–∞—è –æ—Ç —Ä–µ–ª–µ–π–Ω—ã—Ö –∏ –∑–∞–∫–∞–Ω—á–∏–≤–∞—è —ç—Ç–æ–π –Ω–µ—á–µ—Ç–∫–æ–π –ª–æ–≥–∏–∫–æ–π. –î–∞, —Ä–∞—Å–ø–∏—Å–∞–Ω–æ –∫—Ä–∞—Å–∏–≤–æ, –Ω–æ —è –≤—ã–Ω–µ—Å –∏–∑ —ç—Ç–æ–π –≥–ª–∞–≤—ã, —á—Ç–æ —á—Ç–æ–±—ã —ç—Ç–æ —Ä–µ–∞–ª—å–Ω–æ —Ä–∞–±–æ—Ç–∞–ª–æ, –Ω—É–∂–Ω–æ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ —Ö–æ—Ä–æ—à–æ –∑–Ω–∞—Ç—å –∫–æ–Ω—Ç—Ä–æ–ª–∏—Ä—É–µ–º—É—é —Å–∏—Å—Ç–µ–º—É. –ò–Ω–∞—á–µ –∑–∞–ø–æ–ª—É—á–∏—Ç—å –≤–æ–∑–±—É–∂–¥–µ–Ω–∏–µ –∏ –≤—Å–µ –æ—Å—Ç–∞–ª—å–Ω—ã–µ –ø—Ä–µ–ª–µ—Å—Ç–∏ - —Ä–∞–∑ –ø–ª—é–Ω—É—Ç—å. –ê –µ—Å–ª–∏ —Å–∏—Å—Ç–µ–º—É —Ö–æ—Ä–æ—à–æ –∑–Ω–∞–µ—à—å - —Ç–æ—Ç –∂–µ –ü–ò–î —Ä–∞–±–æ—Ç–∞–µ—Ç —Ö–æ—Ä–æ—à–æ.
–≠—Ç–æ —è –∫ —Ç–æ–º—É, —á—Ç–æ –ø—Ä–∏—Ä–æ–¥—É –Ω–µ –æ–±–º–∞–Ω–µ—à—å
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
electroget
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –º–∞—Ä 29, 2022 06:49:05
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 5
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 61
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —Å–µ–Ω 30, 2020 16:51:47–°–æ–æ–±—â–µ–Ω–∏–π: 4634–û—Ç–∫—É–¥–∞: –Ý–§
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ê –ø–æ –∫–æ–¥—É, –±–æ–ª—å—à–µ –∏–ª–∏ –º–µ–Ω—å—à–µ —á–µ–º —É –ø–∏–¥ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞?
–í–æ–ø—Ä–æ—Å —Å–∫–æ—Ä–µ–µ –≤ –¥—Ä—É–≥–æ–º. –Ø–≤–ª—è–µ—Ç—Å—è –∫–æ–¥ –æ–±—â–µ–¥–æ—Å—Ç—É–ø–Ω—ã–º –∏–∑ –æ—Ç–∫—Ä—ã—Ç—ã—Ö –∏—Å—Ç–æ—á–Ω–∏–∫–æ–≤ –∏–ª–∏ –Ω–µ—Ç. –ï—Å–ª–∏ –∫–æ–¥ –æ–±—â–µ–¥–æ—Å—Ç—É–ø–µ–Ω, —Ç–æ —Ç–æ–≥–¥–∞ –≤–æ–∑–º–æ–∂–Ω–æ —Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Ç–∞–∫–∏—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤ –Ω–µ–∑–∞–≤–∏—Å–∏–º—ã–º–∏ —Å–ø–µ—Ü–∏–∞–ª–∏—Å—Ç–∞–º–∏. –ê –µ—Å–ª–∏ –Ω–µ—Ç, —Ç–æ —Ç–æ–≥–¥–∞ —ç—Ç–æ –æ—á–µ—Ä–µ–¥–Ω–æ–π "—Å–∏–º–µ–Ω—Å".
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –º–∞—Ä 29, 2022 11:02:25
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 209
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 941–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–æ–±—Ä—ã–π –¥–µ–Ω—å. –ü–æ —Ä–∞–∑–º–µ—Ä—É –∫–æ–¥–∞ –≤–ø–æ–ª–Ω–µ —Å–æ–ø–æ—Å—Ç–∞–≤–∏–º–æ —Å –ü–ò–î —Ä–µ–≥—É–ª—è—Ç–æ—Ä–æ–º.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
electroget
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –º–∞—Ä 29, 2022 11:07:39
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 5
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 61
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —Å–µ–Ω 30, 2020 16:51:47–°–æ–æ–±—â–µ–Ω–∏–π: 4634–û—Ç–∫—É–¥–∞: –Ý–§
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—Ä–µ–≥—É–ª—è—Ç–æ—Ä —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–Ω –≤ —Ä–∞–º–∫–∞—Ö –∫–æ–Ω—Ç—Ä–∞–∫—Ç–Ω—ã—Ö –æ–±—è–∑–∞—Ç–µ–ª—å—Å—Ç–≤
–¢–æ–≥–¥–∞ —ç—Ç–æ –æ—á–µ—Ä–µ–¥–Ω–æ–π "—Å–∏–º–µ–Ω—Å". –¢–æ –µ—Å—Ç—å —Ä–µ—à–µ–Ω–∏–µ –º–æ–∂–µ—Ç –∏ –Ω–µ–ø–ª–æ—Ö–æ–µ, –Ω–æ –æ—Ü–µ–Ω–∏—Ç—å –µ–≥–æ —Ä–µ–∞–ª—å–Ω—É—é —ç—Ñ—Ñ–µ–∫—Ç–∏–≤–Ω–æ—Å—Ç—å –Ω–µ–≤–æ–∑–º–æ–∂–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∞–ø—Ä 20, 2022 22:07:32
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 209
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 941–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü–µ—Ä–µ–≤—ë–ª –±–∏–±–ª–∏–æ—Ç–µ–∫—É –Ω–∞ —Ü–µ–ª–æ—á–∏—Å–ª–µ–Ω–Ω—É—é –ª–æ–≥–∏–∫—É.
–¢–µ–ø–µ—Ä—å –µ—ë –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –Ω–∞ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞—Ö –±–µ–∑ –ø–æ–¥–¥–µ—Ä–∂–∫–∏ float.
–≠—Ç–æ –∑–∞–Ω—è–ª–æ –Ω–µ–∫–æ—Ç–æ—Ä–æ–µ –≤—Ä–µ–º—è, —Ç–∞–∫ –∫–∞–∫ –Ω—É–∂–Ω–æ –±—ã–ª–æ –ø—Ä–∏–≤–æ–¥–∏—Ç—å –≤–µ–ª–∏—á–∏–Ω—ã –∫ –º–∞—Å—à—Ç–∞–±–Ω—ã–º –µ–¥–∏–Ω–∏—Ü–∞–º +-127 –∏ 0..255.
–¢–∞–∫–∂–µ –Ω—É–∂–Ω–æ –±—ã–ª–æ –ø—Ä–æ—Ç–µ—Å—Ç–∏—Ä–æ–≤–∞—Ç—å –≤—Å–µ –Ω–æ–≤—ã–µ —Ñ—É–Ω–∫—Ü–∏–∏ –∏ –Ω–∞–ø–∏—Å–∞—Ç—å —à–ø–∞—Ä–≥–∞–ª–∫—É –≤ —Ö–µ–¥–µ—Ä–µ.
–ù–æ —Ç–µ–ø–µ—Ä—å –≤—Å—ë –æ—Ñ–æ—Ä–º–∏–ª —Ç–∞–∫, –∫–∞–∫ —Å–∞–º –ø–æ–Ω–∏–º–∞—é.
–ü–æ—Å–∫–æ–ª—å–∫—É —ç—Ç–∞ –≤–µ—Ä—Å–∏—è –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ –Ω–µ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –Ω–∞ —Ä–∞–±–æ—Ç–µ, —è –µ—ë –≤—ã–ª–æ–∂–∏–ª –≤ –æ—Ç–∫—Ä—ã—Ç—ã–π –¥–æ—Å—Ç—É–ø –Ω–∞ –≥–∏—Ç:
https://github.com/Garmin59/Fuzzy_logic_integer –ü–æ–¥—Ä–æ–±–Ω–µ–µ –æ–ø–∏—Å–∞–Ω–∏–µ –±—É–¥–µ—Ç —É –º–µ–Ω—è –≤ –±–ª–æ–≥–µ –Ω–µ—Å–∫–æ–ª—å–∫–æ –ø–æ–∑–∂–µ, —Å—é–¥–∞ —Ç–∞–∫–∂–µ –≤—ã–ª–æ–∂—É –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é.
–ï—Å–ª–∏ –∫–æ–º—É –±—É–¥–µ—Ç –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ –ø–æ—Å–º–æ—Ç—Ä–µ—Ç—å –∏ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å, –ø–∏—à–∏—Ç–µ –º–Ω–µ–Ω–∏—è –∏ –≤–æ–ø—Ä–æ—Å—ã –≤ —ç—Ç—É –≤–µ—Ç–∫—É, –±—É–¥—É –æ—Ç–≤–µ—á–∞—Ç—å.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
igorka
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∞–ø—Ä 21, 2022 08:54:39
–ì—Ä—ã–∑–µ—Ç –∫–∞–Ω–∏—Ñ–æ–ª—å
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –Ω–æ—è 13, 2011 11:21:23–°–æ–æ–±—â–µ–Ω–∏–π: 260–û—Ç–∫—É–¥–∞: –ì–æ—Ä–ª–æ–≤–∫–∞.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–°–æ–≤–ø–∞–¥–µ–Ω–∏–µ, –Ω–µ –∏–Ω–∞—á–µ... –ù–µ—Å–∫–æ–ª—å–∫–æ –¥–Ω–µ–π –∏—â—É –≤ –∏–Ω—Ç–µ—Ä–Ω–µ—Ç–µ –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–∏–µ –ø—Ä–∏–º–µ—Ä—ã —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ –¥–∞–Ω–Ω–æ–≥–æ –∞–ª–≥–æ—Ä–∏—Ç–º–∞, —á—Ç–æ –±—ã –º–æ–∂–Ω–æ –±—ã–ª–æ –ø–æ—Ä—É—á–∏—Ç—å –≤—ã–ø–æ–ª–Ω—è—Ç—å —ç—Ç–æ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—É.–ê–±—Å–æ–ª—é—Ç–Ω–æ —Å–ª—É—á–∞–π–Ω–æ –ø–æ–ø–∞–ª–∞—Å—å –Ω–∞ –≥–ª–∞–∑–∞ –≤–∞—à–∞ —Ç–µ–º–∞.–ü–æ–∑–≤–æ–ª—å—Ç–µ –≤—ã—Å–∫–∞–∑–∞—Ç—å —Å–≤–æ–µ –º–Ω–µ–Ω–∏–µ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∞–ø—Ä 21, 2022 12:04:35
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 209
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 941–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–∞–ø–∏—Å–∞–ª –ø—Ä–æ—Å—Ç–µ–π—à—É—é –ø—Ä–æ–≥—Ä–∞–º–º—É –ü —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞.
–ù–∞–≥—Ä–µ–≤–∞—Ç–µ–ª—å –Ω–∞—á–∏–Ω–∞–µ—Ç —É–º–µ–Ω—å—à–∞—Ç—å –Ω–∞–≥—Ä–µ–≤ –ø—Ä–∏ —Ä–∞–∑–Ω–∏—Ü–µ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä 10 –≥—Ä–∞–¥—É—Å–æ–≤. –ú–æ–∂–Ω–æ –ø–æ–¥–æ–±—Ä–∞—Ç—å –ø–æ–¥ —Å–≤–æ–π—Å—Ç–≤–∞ —Ä–µ–∞–ª—å–Ω–æ–≥–æ –Ω–∞–≥—Ä–µ–≤–∞—Ç–µ–ª—è
–í–Ω–∞—á–∞–ª–µ —Ñ–æ—Ä–º–∏—Ä—É–µ–º –ø—Ä–∞–≤–∏–ª–∞ –æ—Ü–µ–Ω–∫–∏ —Ä–∞–∑–Ω–∏—Ü—ã —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä.
–ó–∞—Ç–µ–º –ø—Ä–∞–≤–∏–ª–∞ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º –Ω–∞–≥—Ä–µ–≤–∞—Ç–µ–ª–µ–º. –ü–æ—Å–∫–æ–ª—å–∫—É –ø–∞—Ä–∞–º–µ—Ç—Ä –æ–¥–∏–Ω, —Ç–æ –∏ –ª–æ–≥–∏—á–µ—Å–∫–∏–µ —Ñ—É–Ω–∫—Ü–∏–∏ –ø–µ—Ä–µ–¥–∞—é—Ç –ø–µ—Ä–≤—ã–π –ø–∞—Ä–∞–º–µ—Ç—Ä –Ω–∞ –≤—ã—Ö–æ–¥ –±–µ–∑ –∏–∑–º–µ–Ω–µ–Ω–∏–π.
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
********************* P heating regulator sample code ***********************/
–ü—Ä–∞–≤–∏–ª–∞ –ø—Ä–æ—Å—Ç–µ–π—à–∏–µ: –µ—Å–ª–∏ —Ö–æ–ª–æ–¥–Ω–æ, —Ç–æ –≥—Ä–µ–µ–º, –µ—Å–ª–∏ —Ç–µ–ø–ª–æ, —Ç–æ –Ω–µ –≥—Ä–µ–µ–º.
–ü—Ä–∞–≤–∏–ª–∞ –∑–∞—Ü–∏–∫–ª–∏–≤–∞–µ–º.
–°–ø–µ—Ü–∏–∞–ª—å–Ω–æ —É—Å–ª–æ–∂–Ω–∏–ª –∫–æ–¥ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è–º–∏ –≤—Ö–æ–¥–Ω—ã—Ö –∏ –≤—ã—Ö–æ–¥–Ω—ã—Ö –≤–µ–ª–∏—á–∏–Ω.
–°–∞–º –∫–æ–¥ –≤ —Ç—Ä–∏ —Å—Ç—Ä–æ—á–∫–∏.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 01, 2022 12:57:02
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 209
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 941–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü—Ä–æ—à–ª–æ –¥–µ—Å—è—Ç—å –¥–Ω–µ–π, –∏ –Ω–∏ –æ–¥–Ω–æ–≥–æ –æ—Ç–∑—ã–≤–∞.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
astrahard
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 01, 2022 14:04:47
–≠—Ç–æ –Ω–µ —Ö–≤–æ—Å—Ç, —ç—Ç–æ –∞–Ω—Ç–µ–Ω–Ω–∞
–ö–∞—Ä–º–∞: -16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -136
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Ñ–µ–≤ 19, 2015 12:41:04–°–æ–æ–±—â–µ–Ω–∏–π: 1405
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–∏
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
pavel2000
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 01, 2022 17:20:02
–ö–∞—Ä–º–∞: -9
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 28
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç —è–Ω–≤ 27, 2012 20:07:54–°–æ–æ–±—â–µ–Ω–∏–π: 859–û—Ç–∫—É–¥–∞: –¢–æ–º—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù—É, —Ç–µ–º–∞ –Ω–∞–≤–µ—Ä–Ω–æ–µ —Å–ª–æ–∂–Ω–∞, –Ω–∞–¥–æ —á–∏—Ç–∞—Ç—å-–∏–∑—É—á–∞—Ç—å.
–°—Ö–æ–¥—É –∑–∞–º–µ—á—É, —á—Ç–æ –ø—Ä–∏–≤–µ–¥–µ–Ω–Ω—ã–π –ø—Ä–∏–º–µ—Ä "–ù–∞–ø–∏—Å–∞–ª –ø—Ä–æ—Å—Ç–µ–π—à—É—é –ø—Ä–æ–≥—Ä–∞–º–º—É –ü —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞." —É –º–µ–Ω—è —Ç–∞–∫ –∏ –Ω–µ –∑–∞—Ä–∞–±–æ—Ç–∞–ª.
–Ø –µ–≥–æ –ø—ã—Ç–∞–ª—Å—è –≤–∫–æ—Ä—è—á–∏—Ç—å –≤ 8051 –ø—Ä–æ—Ü.. –í–∫–æ—Ä—è—á–∏–ª. –ù–æ –Ω–µ —Ä–∞–±–æ—Ç–∞–µ—Ç.
–Ý–∞–¥–∏ –ø—Ä–æ–≤–µ—Ä–∫–∏ –≤–∫–æ—Ä—è—á–∏–ª –∑–∞ –¥–µ—Å—è—Ç—å –º–∏–Ω—É—Ç –≤ –∞—Ä–¥—É–∏–Ω—É. –¢–æ–∂–µ –≤—ã–¥–∞–µ—Ç –Ω—É–ª–∏.
fuzzy_logic.c/fuzzy_logic.h –≤–∑—è—Ç—ã —Å github-–∞
–°–ø–æ–π–ª–µ—Ä #include "fuzzy_logic.h"–Ý–µ–∑—É–ª—å—Ç–∞—Ç:
–ö–æ–¥:
Started.
–î–æ–±–∞–≤–ª–µ–Ω–æ after 22 minutes 38 seconds: –ë–ª–∏–Ω, –∞ –≤–µ–¥—å —ç—Ç–æ —Ä–∞–±–æ—Ç–∞–µ—Ç
–û–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è —Ç–∞–º –∑–Ω–∞–∫ –ø–µ—Ä–µ–ø—É—Ç–∞–Ω –≤ –ø—Ä–∏–º–µ—Ä–µ.
–ù–∞–¥–æ –Ω–∞–æ–±–æ—Ä–æ—Ç, delta16 = t_measure - t_setup;
–¢–µ–ø–µ—Ä—å —Ä–∞–±–æ—Ç–∞–µ—Ç:
–ï—Å–ª–∏ "–ø—Ä–∏–Ω—É–¥–∏—Ç–µ–ª—å–Ω–æ –æ—Ö–ª–∞–∂–¥–∞—Ç—å –æ–±—ä–µ–∫—Ç", —Ç–æ —Ä–µ–∑–∫–æ –ø—ã—Ç–∞–µ—Ç—Å—è –≥—Ä–µ—Ç—å –µ–≥–æ.
–ï—Å–ª–∏ –Ω–µ –æ—Ö–ª–∞–∂–¥–∞—Ç—å, —Ç–æ –¥–µ—Ä–∂–∏—Ç –Ω–∞ –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–Ω–æ–º —É—Ä–æ–≤–Ω–µ.
–¶–µ–ª–µ–≤–∞—è –¢ –≤—ã—Å—Ç–∞–≤–ª–µ–Ω–∞ –≤ 90C, —Ç.–µ. –¥–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç, –ø—Ä–∏–º–µ—Ä–Ω–æ –∫–∞–∫ –ü-—Ä–µ–≥—É–ª—è—Ç–æ—Ä —Å –ö–ø=10.
–î–æ–±–∞–≤–ª–µ–Ω–æ after 12 minutes 16 seconds: #define IN_COLD -10
#define IN_HOT 0
#define OUT_COLD 0
#define OUT_HOT 100
–£—á–∏—Ç—ã–≤–∞—è —á—Ç–æ —ç—Ç–∏ –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç—ã –∫–∞–∫ —Ä–∞–∑ –∏ –¥–∞—é—Ç –ö–ø = 10 –∫–∞–∫ (100-0) / (0 - (-10)) --, —Ç–æ –Ω–∞ —Ç–∞–∫–æ–º –ø—Ä–∏–º–µ—Ä–µ –ø—Ä–µ–∏–º—É—â–µ—Å—Ç–≤–æ –Ω–µ—á–µ—Ç–∫–æ–π –ª–æ–≥–∏–∫–∏ –Ω–µ –æ—á–µ–≤–∏–¥–Ω–æ.
–ö–∞–∫–∞—è —Ä–∞–∑–Ω–∏—Ü–∞, –¥–ª—è –∫–∞–∫–æ–≥–æ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ –ø–æ—Ç—Ä–µ–±—É–µ—Ç—Å—è –ø–æ–¥–æ–±—Ä–∞—Ç—å –ö–ø = 10 - –¥–ª—è –ü-—Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ –∏–ª–∏ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ –Ω–∞ –Ω–µ—á–µ—Ç–∫–æ–π –ª–æ–≥–∏–∫–µ?
–í–ª–æ–∂–µ–Ω–∏—è:
image.png [20.94 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 1306
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 01, 2022 18:04:22
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 209
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 941–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–û—Ç–ª–∏—á–Ω–æ, —á—Ç–æ —É –≤–∞—Å –∑–∞—Ä–∞–±–æ—Ç–∞–ª–æ –Ω–∞ 51 –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä–µ! –ë–∏–±–ª–∏–æ—Ç–µ–∫—É –ø—Ä–æ–≤–µ—Ä—è–ª –Ω–∞ –ø–∫ –≤ Vision Studio Code. –û–ø–µ—á–∞—Ç–∫—É –ø–æ–ø—Ä–∞–≤–ª—é.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
pavel2000
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 01, 2022 19:16:28
–ö–∞—Ä–º–∞: -9
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 28
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç —è–Ω–≤ 27, 2012 20:07:54–°–æ–æ–±—â–µ–Ω–∏–π: 859–û—Ç–∫—É–¥–∞: –¢–æ–º—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–∞, —è –±–µ–≥–ª–æ –ø—Ä–æ—á–∏—Ç–∞–ª —Å—Å—ã–ª–∫—É –Ω–∞ –±–ª–æ–≥.
–≤–æ–ø—Ä–æ—Å—ã
1) –ó–∞—á–µ–º –≤ —Ñ—É–Ω–∫—Ü–∏—è—Ö –µ—Å—Ç—å —Å—Ç—Ä–æ–∫–∞ "(void)p3;" ? –ü—Ä–æ—Å—Ç–æ —á—Ç–æ–±—ã –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä –Ω–µ —Ä—É–≥–∞–ª—Å—è?
2) –ì–¥–µ –±—ã –Ω–∞–∏—Å–∫–∞—Ç—å –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é –¥–ª—è –¥–∞–ª—å–Ω–µ–π—à–µ–≥–æ –∏–∑—É—á–µ–Ω–∏—è, —á—Ç–æ–±—ã —Å–¥–µ–ª–∞—Ç—å —Ä–µ–≥—É–ª—è—Ç–æ—Ä –ø–æ—Å–ª–æ–∂–Ω–µ–µ-–ø–æ—Ç–æ—á–Ω–µ–µ.
----
–¶–∏—Ç–∞—Ç–∞:
–û—Ç–ª–∏—á–Ω–æ, —á—Ç–æ —É –≤–∞—Å –∑–∞—Ä–∞–±–æ—Ç–∞–ª–æ –Ω–∞ 51 –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä–µ!
–ù—É —ç—Ç–æ –Ω–µ —Ç–∞–∫ —Ä–∞–¥–æ—Å—Ç–Ω–æ, –Ω–∞ —Å–∞–º–æ–º –¥–µ–ª–µ. –Ø –ø—Ä–∞–≤–∏–ª –∫–æ–¥ –≤ Keil, –∏ –æ–≥—Ä–∞–Ω–∏—á–µ–Ω–∏–π —ç—Ç–æ–≥–æ –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä–∞ —ç—Ç–æ —Å–ø–µ—Ü–∏—Ñ–∏—á–µ—Å–∫–æ–µ —Ä–∞–∑–≤–ª–µ—á–µ–Ω–∏–µ.
–ö–æ–¥ –∑–∞—Ä–∞–±–æ—Ç–∞–ª –≤ —Ç–æ–º —á–∏—Å–ª–µ [–≤–µ—Ä–æ—è—Ç–Ω–æ] –±–ª–∞–≥–æ–¥–∞—Ä—è —É–¥–∞–ª–µ–Ω–∏—é p3 –∏–∑-–∑–∞ –æ—Å–æ–±–µ–Ω–Ω–æ—Å—Ç–µ–π –ø–µ—Ä–µ–¥–∞—á–∏ –∞—Ä–≥—É–º–µ–Ω—Ç–æ–≤ –≤ —Ñ—É–Ω–∫—Ü–∏—é.
–í –∞–ø–ø–Ω–æ—Ç–µ
https://www.keil.com/appnotes/files/apnt_129.pdf —Å—Ç—Ä–∞–Ω–∏—Ü–∞ 4 —É–∫–∞–∑–∞–Ω–æ, —á—Ç–æ –∞—Ä–≥—É–º–µ–Ω—Ç—ã —Ñ—É–Ω–∫—Ü–∏–∏, –≤—ã–∑—ã–≤–∞–µ–º–æ–π —á–µ—Ä–µ–∑ —É–∫–∞–∑–∞—Ç–µ–ª—å –Ω–∞ —Ñ—É–Ω–∫—Ü–∏—é,
–¥–æ–ª–∂–Ω—ã —Ä–∞–∑–º–µ—â–∞—Ç—å—Å—è –≤ —Ä–µ–≥–∏—Å—Ç—Ä–∞—Ö, –∞ —ç—Ç–æ –Ω–µ –±–æ–ª–µ–µ —Ç—Ä–µ—Ö –∞—Ä–≥—É–º–µ–Ω—Ç–æ–≤. –ü–æ—ç—Ç–æ–º—É –±–æ–ª–µ–µ —Å–ª–æ–∂–Ω—ã–µ –ø—Ä–∞–≤–∏–ª–∞, —á–µ–º low/high, –∫–æ—Ç–æ—Ä—ã–º –±—É–¥–µ—Ç –Ω—É–∂–µ–Ω p3, —Å—Ö–æ–¥—É –Ω–µ –ø–æ–π–¥—É—Ç.
–ö—Å—Ç–∞—Ç–∏, –≤–æ—Ç —Ç–∞–∫ –º–æ–∂–Ω–æ –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π start –∏ —á—É—Ç—å —Å–æ–∫—Ä–∞—Ç–∏—Ç—å –º–∞—à–∏–Ω–Ω—ã–π –∫–æ–¥.
–°–ø–æ–π–ª–µ—Ä f1 = f = fuzzy->start_ffunc;
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 01, 2022 21:55:20
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 209
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 941–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–≤–æ–ø—Ä–æ—Å—ã
–í –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö —Ñ—É–Ω–∫—Ü–∏—è—Ö –Ω—É–∂–Ω—ã —Ç—Ä–∏ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ, –Ω–∞–ø—Ä–∏–º–µ—Ä —Ç—Ä–∞–ø–µ—Ü–∏—è. –ï—Å–ª–∏ –æ–Ω–∏ –Ω–µ –Ω—É–∂–Ω—ã, —É–±–∏—Ä–∞–µ–º –ø—Ä–µ–¥—É–ø—Ä–µ–∂–¥–µ–Ω–∏–µ –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä–∞
–¶–∏—Ç–∞—Ç–∞:
2) –ì–¥–µ –±—ã –Ω–∞–∏—Å–∫–∞—Ç—å –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é –¥–ª—è –¥–∞–ª—å–Ω–µ–π—à–µ–≥–æ –∏–∑—É—á–µ–Ω–∏—è, —á—Ç–æ–±—ã —Å–¥–µ–ª–∞—Ç—å —Ä–µ–≥—É–ª—è—Ç–æ—Ä –ø–æ—Å–ª–æ–∂–Ω–µ–µ-–ø–æ—Ç–æ—á–Ω–µ–µ.
–Ø –∏—Å–∫–∞–ª –≤ –≥—É–≥–ª–µ, –ø–∞—Ä—É —Å—Å—ã–ª–æ–∫ –æ—Å—Ç–∞–≤–∏–ª –≤ –±–ª–æ–≥–µ, –æ—Å—Ç–∞–ª—å–Ω–æ–µ –Ω–µ —Å–æ—Ö—Ä–∞–Ω–∏–ª, –Ω–∞ –∞–Ω–≥–ª–∏–π—Å–∫–æ–º –Ω–∞—Ö–æ–¥–∏–ª —Ç–æ–ª–∫–æ–≤—ã–µ —Å—Ç–∞—Ç—å–∏.
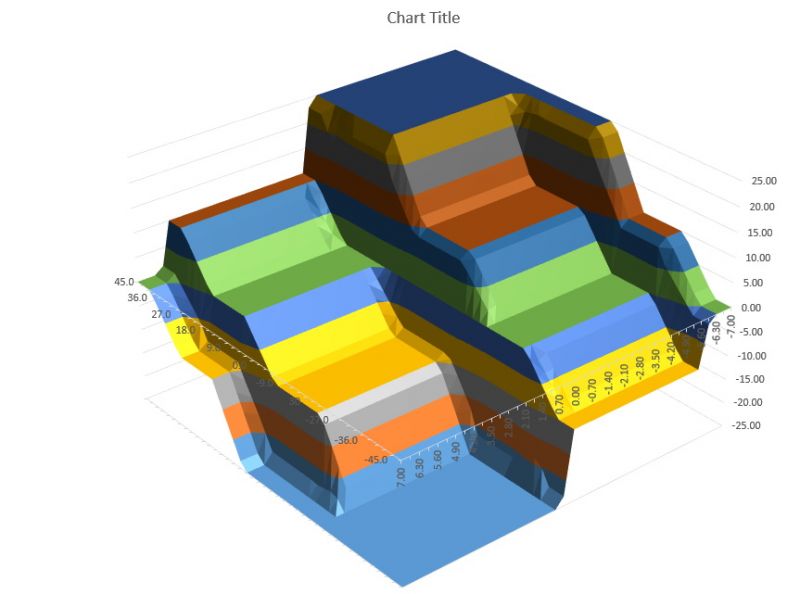
–î–ª—è –º–µ–Ω—è —Å–∞–º–æ–µ —Å–ª–æ–∂–Ω–æ–µ –±—ã–ª–æ –ø–æ–Ω—è—Ç—å, –∫–∞–∫ –∏–∑ –Ω–µ—á—ë—Ç–∫–∏—Ö —Ä–µ–∑—É–ª—å—Ç–∞—Ç–æ–≤ –ø–æ–ª—É—á–∞—Ç—å —á—ë—Ç–∫–æ–µ —Ä–µ—à–µ–Ω–∏–µ
–ü–æ—Ç–æ–º –ø–æ–Ω—è–ª –ø—Ä–æ –≤–µ—Å–æ–≤—ã–µ –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç—ã, –∏ –ø–∞–∑–∑–ª —Å–ª–æ–∂–∏–ª—Å—è.
–î–ª—è –æ—Ü–µ–Ω–∫–∏ –ø—Ä–∞–≤–∏–ª –æ—Ç–ª–∏—á–Ω–æ –ø–æ–¥–æ—à—ë–ª –≤–∞—Ä–∏–∞–Ω—Ç –ø–æ—Å—Ç—Ä–æ–µ–Ω–∏—è —Ç—Ä—ë—Ö–º–µ—Ä–Ω–æ–π –ø–æ–≤–µ—Ä—Ö–Ω–æ—Å—Ç–∏ –∏–∑ —Ä–µ–∑—É–ª—å—Ç–∞—Ç–æ–≤ –∏ –≤—Ö–æ–¥–Ω—ã—Ö –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö. –°—Ä–∞–∑—É –ø–æ–∫–∞–∑—ã–≤–∞–µ—Ç, –≥–¥–µ –æ—à–∏–±—Å—è –≤ –ø—Ä–∞–≤–∏–ª–∞—Ö:
–¶–∏—Ç–∞—Ç–∞:
–ö–æ–¥ –∑–∞—Ä–∞–±–æ—Ç–∞–ª –≤ —Ç–æ–º —á–∏—Å–ª–µ [–≤–µ—Ä–æ—è—Ç–Ω–æ] –±–ª–∞–≥–æ–¥–∞—Ä—è —É–¥–∞–ª–µ–Ω–∏—é p3 –∏–∑-–∑–∞ –æ—Å–æ–±–µ–Ω–Ω–æ—Å—Ç–µ–π –ø–µ—Ä–µ–¥–∞—á–∏ –∞—Ä–≥—É–º–µ–Ω—Ç–æ–≤ –≤ —Ñ—É–Ω–∫—Ü–∏—é.
–í –≤–∞—à–µ–º —Å–ª—É—á–∞–µ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ç–æ–ª—å–∫–æ –æ–¥–∏–Ω —É–∫–∞–∑–∞—Ç–µ–ª—å, –Ω–∞ —Å—Ç—Ä—É–∫—Ç—É—Ä—É –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤, –Ω–æ –Ω–∞–¥–æ –ø—Ä–∞–≤–∏—Ç—å –∫–æ–¥ –±–∏–±–ª–∏–æ—Ç–µ–∫–∏
–¶–∏—Ç–∞—Ç–∞:
–ö—Å—Ç–∞—Ç–∏, –≤–æ—Ç —Ç–∞–∫ –º–æ–∂–Ω–æ –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π start –∏ —á—É—Ç—å —Å–æ–∫—Ä–∞—Ç–∏—Ç—å –º–∞—à–∏–Ω–Ω—ã–π –∫–æ–¥.
–ö–æ–Ω–µ—á–Ω–æ –º–æ–∂–Ω–æ, —ç—Ç–æ –º–æ—è —Ñ–æ–±–∏—è - –∏–∑–±–µ–≥–∞—Ç—å break.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
pavel2000
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞–π 02, 2022 15:57:25
–ö–∞—Ä–º–∞: -9
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 28
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç —è–Ω–≤ 27, 2012 20:07:54–°–æ–æ–±—â–µ–Ω–∏–π: 859–û—Ç–∫—É–¥–∞: –¢–æ–º—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ê –∫–∞–∫ PI —Ä–µ–≥—É–ª—è—Ç–æ—Ä —Å–¥–µ–ª–∞—Ç—å? –î–ª—è –Ω–∞–≥—Ä–µ–≤–∞—Ç–µ–ª—è.
–í—Ö–æ–¥: –£—Å—Ç–∞–≤–∫–∞, —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä–∞. –í—ã—Ö–æ–¥: % –º–æ—â–Ω–æ—Å—Ç–∏ –Ω–∞–≥—Ä–µ–≤–∞—Ç–µ–ª—è, 0-1000 (—à–∞–≥ 0.1%).
–í —Å—Ç–∞—Ç—å–µ –Ω–∞ —Ö–∞–±—Ä–µ
https://habr.com/ru/post/500268/ –µ—Å—Ç—å –≤—Ä–æ–¥–µ –∫–∞–∫ –ø–æ–¥—Ö–æ–¥—è—â–∞—è "–±–∞–∑–∞ –ø—Ä–∞–≤–∏–ª –¥–ª—è —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞" (–µ—Å–ª–∏ –∑–∞–º–µ–Ω–∏—Ç—å "—Å–∫–æ—Ä–æ—Å—Ç—å" –Ω–∞ "–æ—Ç–∫–ª–æ–Ω–µ–Ω–∏–µ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã"):
–µ—Å–ª–∏ –æ—Ç–∫–ª–æ–Ω–µ–Ω–∏–µ –±–æ–ª—å—à–µ –∏–ª–∏ (–æ—Ç–∫–ª–æ–Ω–µ–Ω–∏–µ –Ω–æ—Ä–º–∞ (0) –∏ —Å–∫–æ—Ä–æ—Å—Ç—å —Ä–∞—Å—Ç–µ—Ç), —Ç–æ –≤–æ–∑–¥–µ–π—Å—Ç–≤–∏–µ –±–æ–ª—å—à–µ.
–µ—Å–ª–∏ –æ—Ç–∫–ª–æ–Ω–µ–Ω–∏–µ –≤ –Ω–æ—Ä–º–µ, —Ç–æ –≤–æ–∑–¥–µ–π—Å—Ç–≤–∏–µ 0.
–µ—Å–ª–∏ –æ—Ç–∫–ª–æ–Ω–µ–Ω–∏–µ –º–µ–Ω—å—à–µ –∏–ª–∏ (–æ—Ç–∫–ª–æ–Ω–µ–Ω–∏–µ –Ω–æ—Ä–º–∞ (0) –∏ —Å–∫–æ—Ä–æ—Å—Ç—å –ø–∞–¥–∞–µ—Ç), —Ç–æ –≤–æ–∑–¥–µ–π—Å—Ç–≤–∏–µ –º–µ–Ω—å—à–µ.
–ù–æ —Ç—É—Ç –Ω–µ–ø–æ–Ω—è—Ç–Ω—ã–π –º–æ–º–µ–Ω—Ç - "–≤–æ–∑–¥–µ–π—Å—Ç–≤–∏–µ –±–æ–ª—å—à–µ/–Ω–æ–ª—å/–º–µ–Ω—å—à–µ" - —Ç.–µ. –ø–æ–ª—É—á–∞–µ—Ç—Å—è, —á—Ç–æ –Ω–∞ –≤—ã—Ö–æ–¥–µ —Ç–∞–∫–æ–≥–æ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ –Ω–∞–¥–æ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä?
–í –ø—Ä–∏–Ω—Ü–∏–ø–µ —ç—Ç–æ –Ω–µ –ø—Ä–æ–±–ª–µ–º–∞.
–ù–æ –æ—Å–Ω–æ–≤–Ω–æ–π –≤–æ–ø—Ä–æ—Å - –∫–∞–∫ –≤ –ø—Ä–∏–Ω—Ü–∏–ø–µ –≤—Å—ë —ç—Ç–æ –æ–ø–∏—Å–∞—Ç—å –≤ —Ñ—É–Ω–∫—Ü–∏—è—Ö –∏ –ø—Ä–∞–≤–∏–ª–∞—Ö?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß—Ç–æ –ª—É—á—à–µ: PID —Ä–µ–≥—É–ª—è—Ç–æ—Ä, –∏–ª–∏ Fuzzy logic?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞–π 02, 2022 17:54:42
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 209
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 941–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¢—É—Ç –≤—Å—ë –ø—Ä–æ—Å—Ç–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1
[ –°–æ–æ–±—â–µ–Ω–∏–π: 17 ]
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 20
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è