|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 3 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 61 ] |
, , , |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
jcxz

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 23, 2024 18:10:25 |
|
| ąĪą▓ąĄčĆą╗ąĖčé č鹥ą║čüč鹊ą╗ąĖčé ą║ąŠą│čéčÅą╝ąĖ |
ąÜą░čĆą╝ą░: -10
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą▓ą│ 15, 2017 10:51:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1156
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą×ą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮą░ ą╗ąĖąĮąĖąĖ 菹Įą║ąŠą┤ąĄčĆą░ ąĮą░ą┤ąŠ ą▓ąĄčłą░čéčī rc-čåąĄą┐ąŠčćą║ąĖ. ąÉ RC-čåąĄą┐ąŠčćą║ąĖ č鹊 ąĘą░č湥ą╝? ąÉ č鹊 ą┐ąŠą╗čīąĘčāčÄčüčī ą▒ąĄąĘ ąĮąĖčģ ąĖ ą▓čĆąŠą┤ąĄ ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé. ąØąŠ ą╝ą░ą╗ąŠ ą╗ąĖ - ą╝ąŠąČąĄčé ą▒ąĄąĘ ąĮąĖčģ čéą░čĆą░ą║ą░ąĮčŗ ą▓ čģą░č鹥 ąĘą░ą▓ąŠą┤čÅčéčüčÅ? ą¤čĆąŠčüą▓ąĄčéąĖč鹥, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠąĘą┤ąĮąŠ! 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SfS
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 04:29:34 |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 12, 2007 11:21:39
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13333
ą×čéą║čāą┤ą░: ąóąŠą╝čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą×ą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮą░ ą╗ąĖąĮąĖąĖ 菹Įą║ąŠą┤ąĄčĆą░ ąĮą░ą┤ąŠ ą▓ąĄčłą░čéčī rc-čåąĄą┐ąŠčćą║ąĖ. ąÉ RC-čåąĄą┐ąŠčćą║ąĖ č鹊 ąĘą░č湥ą╝? ąÉ č鹊 ą┐ąŠą╗čīąĘčāčÄčüčī ą▒ąĄąĘ ąĮąĖčģ ąĖ ą▓čĆąŠą┤ąĄ ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé. ąØąŠ ą╝ą░ą╗ąŠ ą╗ąĖ - ą╝ąŠąČąĄčé ą▒ąĄąĘ ąĮąĖčģ čéą░čĆą░ą║ą░ąĮčŗ ą▓ čģą░č鹥 ąĘą░ą▓ąŠą┤čÅčéčüčÅ? ą¤čĆąŠčüą▓ąĄčéąĖč鹥, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠąĘą┤ąĮąŠ! ąöą╗čÅ ąĘą░čēąĖčéčŗ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░. ąØą░ą▓ąĄčĆąĮąŠąĄ ą▓čŗ ą│ąŠč鹊ą▓čŗą╝ ą╝ąŠą┤čāą╗ąĄą╝ 菹Įą║ąŠą┤ąĄčĆą░ ą┐ąŠą╗čīąĘčāąĄč鹥čüčī ą▓čĆąŠą┤ąĄ čéą░ą║ąŠą│ąŠ ąĪą┐ąŠą╣ą╗ąĄčĆ
 ąóą░ą╝ čāąČąĄ čüč鹊čÅčé ąŠąĮąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
jcxz
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 14:22:08 |
|
| ąĪą▓ąĄčĆą╗ąĖčé č鹥ą║čüč鹊ą╗ąĖčé ą║ąŠą│čéčÅą╝ąĖ |
ąÜą░čĆą╝ą░: -10
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą▓ą│ 15, 2017 10:51:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1156
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąöą╗čÅ ąĘą░čēąĖčéčŗ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░.
ąØą░ą▓ąĄčĆąĮąŠąĄ ą▓čŗ ą│ąŠč鹊ą▓čŗą╝ ą╝ąŠą┤čāą╗ąĄą╝ 菹Įą║ąŠą┤ąĄčĆą░ ą┐ąŠą╗čīąĘčāąĄč鹥čüčī ą▓čĆąŠą┤ąĄ čéą░ą║ąŠą│ąŠ ąØą░ą▓ąĄčĆąĮąŠąĄ čÅ ą┐čĆąŠčüč鹊 ą┐čĆąĖą┐ą░čÅą╗ 菹Įą║ąŠą┤ąĄčĆ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā. ąōąŠą╗čŗą╣ 菹Įą║ąŠą┤ąĄčĆ ą║ ą│ąŠą╗ąŠą╣ ąĮąŠą│ąĄ ą£ąÜ. ąØąĖą║ą░ą║ąĖčģ ą╝ąŠą┤čāą╗ąĄą╣ čā ą╝ąĄąĮčÅ ąĮąĄčé. RC-čåąĄą┐ąŠčćą║ąĖ ą▒ąĄčüą┐ąŠą╗ąĄąĘąĮčŗ ą┤ą╗čÅ ą▒ąŠčĆčīą▒čŗ čü ą┤čĆąĄą▒ąĄąĘą│ąŠą╝. ą¤ąŠą╗ąĄąĘąĄąĮ č鹊ą╗čīą║ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ąŠą┐čĆąŠčüą░ ąĮąŠą│ 菹Įą║ąŠą┤ąĄčĆą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąÉą╗ąĄą║čüą░ąĮą┤čĆąø
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 14:44:30 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 187
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 8268
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąĮąŠčÅ 30, 2009 03:00:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 39643
ą×čéą║čāą┤ą░: ąØąĄčĆąĄąĘąĖąĮąŠą▓ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÉ ą▓ąŠčé čĆąĄąĘąĖčüč鹊čĆ ą┐ąŠą┤čéčÅąČą║ąĖ ą┤ą░ą╗ąĄą║ąŠ ąĮąĄ ą▒ąĄčüą┐ąŠą╗ąĄąĘąĄąĮ..
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
jcxz
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 14:57:08 |
|
| ąĪą▓ąĄčĆą╗ąĖčé č鹥ą║čüč鹊ą╗ąĖčé ą║ąŠą│čéčÅą╝ąĖ |
ąÜą░čĆą╝ą░: -10
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą▓ą│ 15, 2017 10:51:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1156
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÉ ą▓ąŠčé čĆąĄąĘąĖčüč鹊čĆ ą┐ąŠą┤čéčÅąČą║ąĖ ą┤ą░ą╗ąĄą║ąŠ ąĮąĄ ą▒ąĄčüą┐ąŠą╗ąĄąĘąĄąĮ.. ąæąĄčüą┐ąŠą╗ąĄąĘąĄąĮ. ąśą▒ąŠ - ąĖą╝ąĄąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ ą£ąÜ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
ąÉą╗ąĄą║čüą░ąĮą┤čĆąø
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 15:31:00 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 187
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 8268
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąĮąŠčÅ 30, 2009 03:00:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 39643
ą×čéą║čāą┤ą░: ąØąĄčĆąĄąĘąĖąĮąŠą▓ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
jcxz ą┐ąĖčüą░ą╗(ą░): ąĖą╝ąĄąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ ą£ąÜ. ąŻą│čā.. ąśą╝ąĄąĄčéčüčÅ.. ą¤ąŠčĆčÅą┤ą║ą░ 100 ą║ą×ą╝. ą¦č鹊 ąŠąĮ ąĄčüčéčī, čćč鹊 ąĮąĄčé- ąŠčüąŠą▒ąŠą╣ čĆąŠą╗ąĖ ąĮąĄ ąĖą│čĆą░ąĄčé ąÆ ą┤čāčĆą░ąĖąĮąŠą▓čüą║ąĖčģ čĆą░čüčłąĖčĆąĖč鹥ą╗čīąĮčŗčģ ą┐ą╗ą░čéą║ą░čģ, ąŠą┤ąĮą░ą║ąŠ, ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ ą▓čüąĄą│ą┤ą░ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé. ąÆą┐čĆąŠč湥ą╝- "čģąŠąĘčÅąĖąĮ-ą▒ą░čĆąĖąĮ", ą╝ąŠąČąĮąŠ ąĖ ąĮąĄ čüčéą░ą▓ąĖčéčī.. ąÜąĖčéą░ą╣čåčŗ čāąČąĄ ą┤ą░ą▓ąĮąŠ, ą╝ąĮąŠą│ąĖąĄ "ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗąĄ ą┤ąĄčéą░ą╗ąĖ", ą╗ąĖą▒ąŠ ąĮąĄ čüčéą░ą▓čÅčé, ą╗ąĖą▒ąŠ ąĘą░ą╝ąĄąĮčÅčÄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ąŠą▒čāč湥ąĮąĮčŗą╝ąĖ ą┐ąĄčĆąĄą╝čŗčćą║ą░ą╝ąĖ..
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SfS
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 16:09:31 |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 12, 2007 11:21:39
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13333
ą×čéą║čāą┤ą░: ąóąŠą╝čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
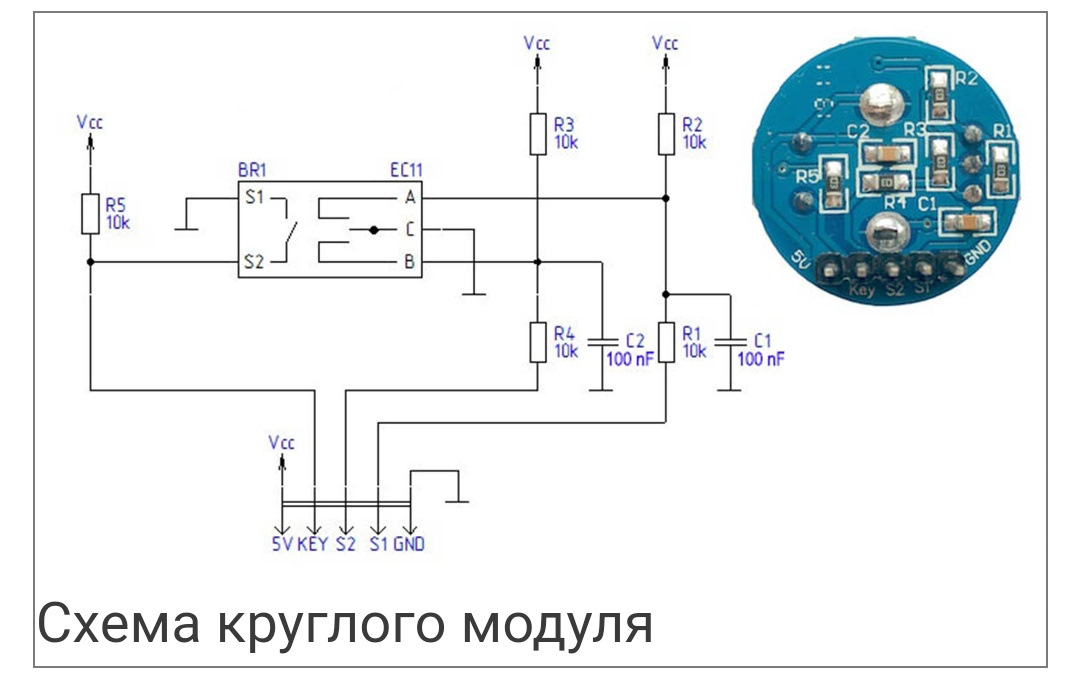
RC-čåąĄą┐ąŠčćą║ąĖ ą▒ąĄčüą┐ąŠą╗ąĄąĘąĮčŗ ą┤ą╗čÅ ą▒ąŠčĆčīą▒čŗ čü ą┤čĆąĄą▒ąĄąĘą│ąŠą╝. ą¤ąŠą╗ąĄąĘąĄąĮ č鹊ą╗čīą║ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ąŠą┐čĆąŠčüą░ ąĮąŠą│ 菹Įą║ąŠą┤ąĄčĆą░. RC čåąĄą┐ąŠčćą║ąĖ ą│ą░čüčÅčé ą║ąŠčĆąŠčéą║ąĖąĄ ąĖą╝ą┐čāą╗čīčüčŗ, ą┤ąŠčüčéą░č鹊čćąĮčŗąĄ ą┤ą╗čÅ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ. ąÉ ą▒ąŠą╗ąĄąĄ ą┐čĆąŠą┤ąŠą╗ąČąĖč鹥ą╗čīąĮčŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ ąŠčéčüąĄą║ą░čÄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą╗ą│ąŠčĆąĖčéą╝ą░, ą▓čĆąŠą┤ąĄ ąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ ą╝ąĮąŠą╣. ąÆ ą╝ąŠą┤čāą╗čÅčģ 菹Įą║ąŠą┤ąĄčĆąŠą▓ ąĮąĄ ą┐čĆąŠčüč鹊 čéą░ą║ čüčéą░ą▓čÅčéčüčÅ rc-čåąĄą┐ąŠčćą║ąĖ. ąØąĄ ą┐ąŠą┤čéčÅąČą║ą░, ą░ ąĖą╝ąĄąĮąĮąŠ rc. ąś ą▓ čüčģąĄą╝ąĄ čŹč鹊 ą▓ąĖą┤ąĮąŠ. ąÆą┐čĆąŠč湥ą╝, ąĮąĄ čģąŠčéąĖč鹥 - ąĮąĄ čüčéą░ą▓čīč鹥:) ąöąĄą╗ąŠ ą▓ą░čłąĄ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 3 minutes 53 seconds:.
ąÆą┐čĆąŠč湥ą╝- "čģąŠąĘčÅąĖąĮ-ą▒ą░čĆąĖąĮ", ą╝ąŠąČąĮąŠ ąĖ ąĮąĄ čüčéą░ą▓ąĖčéčī.. ąÜąĖčéą░ą╣čåčŗ čāąČąĄ ą┤ą░ą▓ąĮąŠ, ą╝ąĮąŠą│ąĖąĄ "ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗąĄ ą┤ąĄčéą░ą╗ąĖ", ą╗ąĖą▒ąŠ ąĮąĄ čüčéą░ą▓čÅčé, ą╗ąĖą▒ąŠ ąĘą░ą╝ąĄąĮčÅčÄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ąŠą▒čāč湥ąĮąĮčŗą╝ąĖ ą┐ąĄčĆąĄą╝čŗčćą║ą░ą╝ąĖ.. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ ą▓ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮąŠą╣ ą╝ąĮąŠą╣ čüčģąĄą╝ąĄ čüč鹊ąĖčé rc čåąĄą┐ąŠčćą║ą░ čü ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą║ąŠą╗ąŠ 1ą╝ąĖą╗ą╗čüąĄą║čāąĮą┤čŗ. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ ą┐čĆąĖ ą▓čĆą░čēąĄąĮąĖąĖ čĆčāą║ą░ą╝ąĖ ą▒ąŠą╗ąĄąĄ č湥ą╝ ą┤ąŠčüčéą░č鹊čćąĮąŠ) ąÜčüčéą░čéąĖ, ąĮą░ ąŠą┤ąĖąĮ čłą░ą│ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓čüąĄ čĆą░ą▓ąĮąŠ 3-4 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ) čÅ ą┐čĆąŠą▓ąĄčĆčÅą╗. ą×čé ąĮąĖčģ ąĖąĘą▒ą░ą▓ą╗čÅąĄą╝čüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą╗ą│ąŠčĆąĖčéą╝ą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
jcxz
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 16:50:04 |
|
| ąĪą▓ąĄčĆą╗ąĖčé č鹥ą║čüč鹊ą╗ąĖčé ą║ąŠą│čéčÅą╝ąĖ |
ąÜą░čĆą╝ą░: -10
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą▓ą│ 15, 2017 10:51:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1156
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
jcxz ą┐ąĖčüą░ą╗(ą░): ąĖą╝ąĄąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ ą£ąÜ. ąŻą│čā.. ąśą╝ąĄąĄčéčüčÅ.. ą¤ąŠčĆčÅą┤ą║ą░ 100 ą║ą×ą╝. ą¦č鹊 ąŠąĮ ąĄčüčéčī, čćč鹊 ąĮąĄčé- ąŠčüąŠą▒ąŠą╣ čĆąŠą╗ąĖ ąĮąĄ ąĖą│čĆą░ąĄčé ąĪ č湥ą│ąŠ ą▒čŗ čŹč鹊 "ąĮąĄ ąĖą│čĆą░ąĄčé"? ą¤ąĖčüą░ą╗ čāąČąĄ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠ: čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄą║čĆą░čüąĮąŠ. ąś čüą║ąŠą╗čīą║ąŠ ą┐ąŠ ą▓ą░čłąĄą╝čā čüčéą░ą▓ąĖčéčī? 100 ąŠą╝? ąÆ ą▒ą░čéą░čĆąĄą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĖčéą░ąĄą╝ąŠąĄ ąŠčé ą┐ą░čĆčŗ AA??? ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 5 minutes 19 seconds:RC čåąĄą┐ąŠčćą║ąĖ ą│ą░čüčÅčé ą║ąŠčĆąŠčéą║ąĖąĄ ąĖą╝ą┐čāą╗čīčüčŗ, ą┤ąŠčüčéą░č鹊čćąĮčŗąĄ ą┤ą╗čÅ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ. ąóą░ą║ ą┐čāčüą║ą░ą╣ ą▓ąŠąĘąĮąĖą║ą░čÄčé. ą£ąĮąĄ ąĮąĄ ąČą░ą╗ą║ąŠ. ą×ąĮąĖ ą▓čüčæ čĆą░ą▓ąĮąŠ ą▒čāą┤čāčé ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮčŗ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą╝ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ąöą░ ąĖ ąĮąĄ ąĘą░ą│ą░čüčÅčé ąŠąĮąĖ ąĖčģ ą┐ąŠą╗ąĮąŠčüčéčīčÄ. ą¤ąŠč鹊ą╝čā čćč鹊, čćč鹊ą▒čŗ ąĖčģ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą│ą░čüąĖčéčī, ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠčüčéą░ą▓ąĖčéčī čéą░ą║ąĖąĄ ąĮąŠą╝ąĖąĮą░ą╗čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╝ąĄčłą░čÄčé čĆą░ą▒ąŠč鹥 菹Įą║ąŠą┤ąĄčĆą░. ą¤ąŠčŹč鹊ą╝čā č鹊ą╗ą║čā ąŠčé RC-čåąĄą┐ąĄą╣ == 0. ą×ą┤ąĖąĮ ą▓čĆąĄą┤. ąÜčüčéą░čéąĖ, ąĮą░ ąŠą┤ąĖąĮ čłą░ą│ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓čüąĄ čĆą░ą▓ąĮąŠ 3-4 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ) čÅ ą┐čĆąŠą▓ąĄčĆčÅą╗. ą×čé ąĮąĖčģ ąĖąĘą▒ą░ą▓ą╗čÅąĄą╝čüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąóą░ą║ ąĖ čā ą╝ąĄąĮčÅ - č鹊ąČąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓čüąĄą│ąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąöą░ąČąĄ ą▒ąĄąĘ RC-čåąĄą┐ąĄą╣. ąĪ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ą▓ąĮąĄčłąĮąĖąĄ ą║ąŠčüčéčŗą╗ąĖ ąĮąĄ ąĮčāąČąĮčŗ. ąÉ čü ą▓ą░čłąĖą╝ąĖ RC-čåąĄą┐čÅą╝ąĖ, ą▒ą░čéą░čĆąĄą╣ą║ąĖ čüą┤ąŠčģąĮčāčé č湥čĆąĄąĘ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĮąĄą┤ąĄą╗čī. ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čā ą╝ąĄąĮčÅ čĆą░ą▒ąŠčéą░čÄčé čāąČąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╗ąĄčé.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SfS
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 17:06:40 |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 12, 2007 11:21:39
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13333
ą×čéą║čāą┤ą░: ąóąŠą╝čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÉ čü ą▓ą░čłąĖą╝ąĖ RC-čåąĄą┐čÅą╝ąĖ, ą▒ą░čéą░čĆąĄą╣ą║ąĖ čüą┤ąŠčģąĮčāčé č湥čĆąĄąĘ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĮąĄą┤ąĄą╗čī. ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čā ą╝ąĄąĮčÅ čĆą░ą▒ąŠčéą░čÄčé čāąČąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╗ąĄčé. ąÜą░ą║ą░čÅ čüą▓čÅąĘčī čéčāčé čü ą▒ą░čéą░čĆąĄą╣ą║ą░ą╝ąĖ? ą¦ąĄčĆąĄąĘ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╣ čĆą░ąĘčĆčÅą┤ąĖčéčüčÅ čćč鹊-ą╗ąĖ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
jcxz
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 17:23:51 |
|
| ąĪą▓ąĄčĆą╗ąĖčé č鹥ą║čüč鹊ą╗ąĖčé ą║ąŠą│čéčÅą╝ąĖ |
ąÜą░čĆą╝ą░: -10
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą▓ą│ 15, 2017 10:51:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1156
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜą░ą║ą░čÅ čüą▓čÅąĘčī čéčāčé čü ą▒ą░čéą░čĆąĄą╣ą║ą░ą╝ąĖ?
ą¦ąĄčĆąĄąĘ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╣ čĆą░ąĘčĆčÅą┤ąĖčéčüčÅ čćč鹊-ą╗ąĖ? ąØą░čĆąĖčüčāą╣č鹥 ą▓ą░čłčā RC-čåąĄą┐čī. ąóąŠą│ą┤ą░ ą┐ąŠą╣ą╝čæč鹥.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Starichok51
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 20:43:23 |
|
| ą£ąŠą┤ąĄčĆą░č鹊čĆ |
 |
ąÜą░čĆą╝ą░: 153
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2808
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą▓ą│ 14, 2010 15:05:51
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 18103
ą×čéą║čāą┤ą░: ą│. ą×ąĘąĄčĆčüą║, ą¦ąĄą╗čÅą▒ąĖąĮčüą║ą░čÅ ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
|
jcxz, ą░ čéčŗ ąĮą░čĆąĖčüčāą╣ čüą▓ąŠčÄ RC-čåąĄą┐čī, ą║ąŠč鹊čĆą░čÅ čā č鹥ą▒čÅ čāą╝čāą┤čĆčÅąĄčéčüčÅ čĆą░ąĘčĆčÅąČą░čéčī ą▒ą░čéą░čĆąĄą╣ą║ąĖ.
_________________
ą£čāą┤čĆąŠčüčéčī ą┐čĆąĖčģąŠą┤ąĖčé ą▓ą╝ąĄčüč鹥 čü ąĖą╝ą┐ąŠč鹥ąĮčåąĖąĄą╣...
ąÜąŠą│ą┤ą░ ąĮą░ čĆčāčüčüą║ąŠą╝ č乊čĆčāą╝ąĄ ą┐ąĄčĆąĄčģąŠą┤čÅčé ąĮą░ ąÆčŗ, ą▓ čĆąĄą░ą╗čīąĮąŠą╣ ąČąĖąĘąĮąĖ ąĮą░čćąĖąĮą░čÄčé ą▒ąĖčéčī ą╝ąŠčĆą┤čā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SfS
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 24, 2024 23:47:55 |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 12, 2007 11:21:39
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13333
ą×čéą║čāą┤ą░: ąóąŠą╝čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜą░ą║ą░čÅ čüą▓čÅąĘčī čéčāčé čü ą▒ą░čéą░čĆąĄą╣ą║ą░ą╝ąĖ?
ą¦ąĄčĆąĄąĘ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╣ čĆą░ąĘčĆčÅą┤ąĖčéčüčÅ čćč鹊-ą╗ąĖ? ąØą░čĆąĖčüčāą╣č鹥 ą▓ą░čłčā RC-čåąĄą┐čī. ąóąŠą│ą┤ą░ ą┐ąŠą╣ą╝čæč鹥. ąĪčģąĄą╝ą░ ąĄčüčéčī ą▓ čüą┐ą╗ąŠąĄčĆąĄ, čćč鹊 čÅ ą▓ą░ą╝ ą┐čĆąĖą▓ąĄą╗. ąÜą░ą║ čéą░ą╝ ą▒ą░čéą░čĆąĄą╣ą║ą░ čĆą░ąĘčĆčÅą┤ąĖčéčüčÅ? ą£ąĄąČą┤čā čłą░ą│ą░ą╝ąĖ ą║ąŠąĮčéą░ą║čéčŗ 菹Įą║ąŠą┤ąĄčĆą░ čĆą░ąĘąŠą╝ą║ąĮčāčéčŗ ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ čĆą░ąĘčĆčÅąČą░ąĄčéčüčÅ
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
jcxz
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░čĆ 25, 2024 14:16:22 |
|
| ąĪą▓ąĄčĆą╗ąĖčé č鹥ą║čüč鹊ą╗ąĖčé ą║ąŠą│čéčÅą╝ąĖ |
ąÜą░čĆą╝ą░: -10
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą▓ą│ 15, 2017 10:51:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1156
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
jcxz, ą░ čéčŗ ąĮą░čĆąĖčüčāą╣ čüą▓ąŠčÄ RC-čåąĄą┐čī, ą║ąŠč鹊čĆą░čÅ čā č鹥ą▒čÅ čāą╝čāą┤čĆčÅąĄčéčüčÅ čĆą░ąĘčĆčÅąČą░čéčī ą▒ą░čéą░čĆąĄą╣ą║ąĖ. ąÜą░ą║čāčÄ "čüą▓ąŠčÄ"? ą» ą▓čĆąŠą┤ąĄ ą▓čŗčłąĄ čāąČąĄ ą┐ąĖčüą░ą╗, čćč鹊 čā ą╝ąĄąĮčÅ ąĮąĄčé ąĮąĖą║ą░ą║ąŠą╣ RC-čåąĄą┐ąĖ. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ą┐ąŠą╗čīąĘčŗ ąŠčé ąĮąĄčæ ąĮąĖą║ą░ą║ąŠą╣, ąŠą┤ąĖąĮ ą▓čĆąĄą┤. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 8 minutes 14 seconds:ąĪčģąĄą╝ą░ ąĄčüčéčī ą▓ čüą┐ą╗ąŠąĄčĆąĄ, čćč鹊 čÅ ą▓ą░ą╝ ą┐čĆąĖą▓ąĄą╗. ąĪ 10ąÜ-ąŠą╝ąĮčŗą╝ąĖ ą┐ąŠą┤čéčÅąČą║ą░ą╝ąĖ? ąĪąĄčĆčīčæąĘąĮąŠ??? ąĪ 300ą╝ą║ąÉ č鹊ą║ąŠą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ąĮą░ ąŠą┤ąĮčā ą┐ąŠą┤čéčÅąČą║čā? ąś ąĘą░ ą║ą░ą║ąŠąĄ ą▓čĆąĄą╝čÅ ąŠąĮą░ ą▓čŗčüąŠčüąĄčé AA-ą▒ą░čéą░čĆąĄą╣ą║čā?  ąÜą░ą║ čéą░ą╝ ą▒ą░čéą░čĆąĄą╣ą║ą░ čĆą░ąĘčĆčÅą┤ąĖčéčüčÅ?
ą£ąĄąČą┤čā čłą░ą│ą░ą╝ąĖ ą║ąŠąĮčéą░ą║čéčŗ 菹Įą║ąŠą┤ąĄčĆą░ čĆą░ąĘąŠą╝ą║ąĮčāčéčŗ ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ čĆą░ąĘčĆčÅąČą░ąĄčéčüčÅ ąÆčŗ ą▓ąĖą┤ąĖą╝ąŠ č鹥ąŠčĆąĄčéąĖą║. ąś ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąĄčƹȹ░ą╗ąĖ ą▓ čĆčāą║ą░čģ čĆąĄą░ą╗čīąĮčŗčģ ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖčģ 菹Įą║ąŠą┤ąĄčĆąŠą▓ čü ą░ą╗ąĖ. ąśąĮą░č湥 ąĮąĄ ą┐ąĖčüą░ą╗ąĖ ą▒čŗ čéą░ą║ąŠąĄ. ąÉ čā čĆąĄą░ą╗čīąĮąŠą│ąŠ ą░ą╗ąĖčłąĮąŠą│ąŠ 菹Įą║ąŠą┤ąĄčĆą░ ąĘą░ą┐čĆąŠčüč鹊 ą╝ąŠąČąĄčé ąŠčüčéą░čéčīčüčÅ ąĘą░ą╝ą║ąĮčāčéčŗą╝ ąŠą┤ąĖąĮ ąĖąĘ ą║ąŠąĮčéą░ą║č鹊ą▓ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ čüčéą░ą▒ąĖą╗čīąĮčŗčģ ą┐ąŠą╗ąŠąČąĄąĮąĖą╣. ąś č鹊ą│ą┤ą░ ą▓ą░čłą░ čüčģąĄą╝ą░ ą▒čŗčüčéčĆąŠ ą▓čŗčüąŠčüąĄčé ą▒ą░čéą░čĆąĄą╣ą║čā ą┐čĆąŠčüč鹊 ą╗čæąČą░ ąĮą░ ą┐ąŠą╗ą║ąĄ. ąÉąĮą░ą╗ąŠą│ąĖčćąĮąŠ ą║ą░ą║ ąĖ čüčģąĄą╝ą░ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ ą┐ąŠą┤čéčÅąČą║ą░ą╝ąĖ, ąĘą░ ą║ąŠč鹊čĆčāčÄ čéčāčé č鹊ą┐ąĖą╗ąĖ ą┤čĆčāą│ąĖąĄ č鹥ąŠčĆąĄčéąĖą║ąĖ. PS: ą¤ąĖčłčā ąĮą░ ąŠčüąĮąŠą▓ąĄ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą┐čĆą░ą║čéąĖč湥čüą║ąŠą│ąŠ ąŠą┐čŗčéą░ čü ą░ą╗ąĖčłąĮčŗą╝ąĖ ą╝ąĄčģ.菹Įą║ąŠą┤ąĄčĆą░ą╝ąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SfS
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░čĆ 25, 2024 18:32:05 |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 12, 2007 11:21:39
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13333
ą×čéą║čāą┤ą░: ąóąŠą╝čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĢčüą╗ąĖ ą║ąŠąĮčéą░ą║čé čĆą░ąĘąŠą╝ą║ąĮčāčé, č鹊 ąĮąĖč湥ą│ąŠ ą┐ąŠą┤čéčÅąČą║ą░ ąĮąĄ ą▓čŗčüąŠčüąĄčé.
ąÉ ą║ą░č湥čüčéą▓ąŠ ą░ą╗ąĖčłąĮčŗčģ 菹Įą║ąŠą┤ąĄčĆąŠą▓ čĆą░ąĘąĮąŠąĄ, ą┤ą░. ąØąŠ čŹč鹊 ą┤čĆčāą│ąŠą╣ ą▓ąŠą┐čĆąŠčü.
ąĢčüą╗ąĖ ąŠą┤ąĖąĮ ąĖąĘ ą║ąŠąĮčéą░ą║č鹊ą▓ ą▒čāą┤ąĄčé ą║ą╗ąĖąĮąĖčéčī ą▓ ąĮčāą╗ąĄ čŹč鹊 čäąĖą│ąĮčÅ ą┐ąŠą╗ąĮą░čÅ.
ąÆą┐čĆąŠč湥ą╝, čā ą╝ąĄąĮčÅ ąĘą░ą┤ą░čćąĖ ąĮąĄ ą▒čŗą╗ąŠ ąŠčé ą▒ą░čéą░čĆąĄąĄą║ ą┐ąĖčéą░čéčī. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéą░ąĄčé ąĖ čģąŠčĆąŠčłąŠ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
jcxz
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░čĆ 25, 2024 20:01:38 |
|
| ąĪą▓ąĄčĆą╗ąĖčé č鹥ą║čüč鹊ą╗ąĖčé ą║ąŠą│čéčÅą╝ąĖ |
ąÜą░čĆą╝ą░: -10
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą▓ą│ 15, 2017 10:51:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1156
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĢčüą╗ąĖ ąŠą┤ąĖąĮ ąĖąĘ ą║ąŠąĮčéą░ą║č鹊ą▓ ą▒čāą┤ąĄčé ą║ą╗ąĖąĮąĖčéčī ą▓ ąĮčāą╗ąĄ čŹč鹊 čäąĖą│ąĮčÅ ą┐ąŠą╗ąĮą░čÅ. ążąĖą│ąĮčÅ ąĮąĄ čäąĖą│ąĮčÅ, ąĮąŠ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐čĆąŠą┤ą░ą▓ą░ąĄą╝čŗčģ ąĮą░ ą░ą╗ąĖ 菹Įą║ąŠą┤ąĄčĆąŠą▓ čéą░ą║ąĖąĄ. ąÉ ąĘąĮą░čćąĖčé ąĮčāąČąĮąŠ čŹč鹊 čāčćąĖčéčŗą▓ą░čéčī. ąóąĄą╝ ą▒ąŠą╗ąĄąĄ čćč鹊 čŹč鹊 ąĮąĄčüą╗ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī. ą£ąŠą╣ ą┤ąĄą▓ą░ą╣čü čĆą░ą▒ąŠčéą░ąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąĖ čü čéą░ą║ąĖą╝ąĖ 菹Įą║ąŠą┤ąĄčĆą░ą╝ąĖ. ąæą░čéą░čĆąĄą╣ą║čā ąĮąĄ čüą░ą┤ąĖčé.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SfS
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░čĆ 29, 2024 14:03:01 |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 12, 2007 11:21:39
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13333
ą×čéą║čāą┤ą░: ąóąŠą╝čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
akl
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 30, 2024 05:01:53 |
|
ąÜą░čĆą╝ą░: 64
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 966
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą╝ą░čĆ 07, 2008 06:54:43
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4222
ą×čéą║čāą┤ą░: ąśąČąĄą▓čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĪą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ ą┤ą╗čÅ čŹąĮą║ąŠą┤ąĄčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ą╝ąĄąČą┤čā čēąĄą╗čćą║ą░ą╝ąĖ č乊čĆą╝ąĖčĆčāčÄčéčüčÅ 4 ą┐ąĄčĆąĄą┐ą░ą┤ą░ ą┐ąŠ ąŠą▒ąŠąĖą╝ ą║ą░ąĮą░ą╗ą░ą╝. ą¤čĆąĖą╝ąĄąĮąĖč鹥ą╗čīąĮąŠ ą║ 菹Įą║ąŠą┤ąĄčĆą░ą╝, ą║ą░ąČą┤ąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą║ąŠč鹊čĆčŗčģ ąŠąĘąĮą░čćą░ąĄčé ą┤ąĄą╣čüčéą▓ąĖąĄ ( ą┐ąŠą▓ąŠčĆąŠčé ąĮą░ ą┤ąĖčüą║čĆąĄčé čāą│ą╗ą░ ąĖą╗ąĖ ą┤ą▓ąĖąČąĄąĮąĖąĄ ąĮą░ ąŠą┤ąĖąĮ ą┤ąĖčüą║čĆąĄčé), ą░ą╗ą│ąŠčĆąĖčéą╝ ą▒čāą┤ąĄčé ą┤čĆčāą│ąŠą╣.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SfS
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 30, 2024 05:50:14 |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 12, 2007 11:21:39
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13333
ą×čéą║čāą┤ą░: ąóąŠą╝čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĢčüą╗ąĖ čÅ ą┐ąŠąĮčÅą╗, čéą░ą╝ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą┐ąĄčĆąĄą┐ą░ą┤.
ą¤ąŠ čüčāčéąĖ ą▓čüąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ 菹Įą║ąŠą┤ąĄčĆąŠą▓ čüą▓ąŠą┤čÅčéčüčÅ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÄ ą┐ąĄčĆąĄčģąŠą┤ą░ ąĖąĘ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ ąŠą┤ąĮąŠ ąĖąĘ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čü ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ ąŠąČąĖą┤ą░ąĮąĖąĄą╝ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ.
ąØąŠ, ą┤ą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆą░ąĘąĮčŗčģ ąĮčÄą░ąĮčüąŠą▓, ą▒čāą┤čāčé ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ.
ąĪą╗ąĄą┤čāąĄčé čāč湥čüčéčī, čćč鹊 ą┤ą╗čÅ ą║čĆčāčéąĖą╗ąŠą║ čĆčāą║ąŠą╣ ą┐čĆąŠą┐čāčüą║ ąĖą╝ą┐čāą╗čīčüą░ ąĖąĘčĆąĄą┤ą║ąŠ ąĮąĄ ą║čĆąĖčéąĖč湥ąĮ.
ąŁč鹊 ąČ ąĮąĄ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čī. ąØčā ą┐ąŠą▓ąĄčĆąĮąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĮą░ ą╗ąĖčłąĮąĖą╣ čłą░ą│ ą▓ą┐ąĄčĆčæą┤. ąØąĄ čüčéčĆą░čłąĮąŠ.
ąźąŠčéčÅ, čÅ čéą░ą║ąŠą│ąŠ ąĮąĄ ąĮą░ą▒ą╗čÄą┤ą░ą╗. ąÆčĆąŠą┤ąĄ ą▓čüąĄ č湥čéą║ąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčéčüčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Starichok51
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 30, 2024 08:51:44 |
|
| ą£ąŠą┤ąĄčĆą░č鹊čĆ |
|
ąÜą░čĆą╝ą░: 153
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2808
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą▓ą│ 14, 2010 15:05:51
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 18103
ą×čéą║čāą┤ą░: ą│. ą×ąĘąĄčĆčüą║, ą¦ąĄą╗čÅą▒ąĖąĮčüą║ą░čÅ ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
čā ą╝ąĄąĮčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, čüč湥čéčćąĖą║ 菹Įą║ąŠą┤ąĄčĆą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ 3 čĆą░ąĘą░ ąĘą░ čüąĄą║čāąĮą┤čā. ąĖ ą╝ąĮąĄ ąĮąĄ ą▓ą░ąČąĮąŠ, ąĮą░ ą║ą░ą║ąŠą╣ čāą│ąŠą╗ čÅ ąĄą│ąŠ ą┐ąŠą▓ąĄčĆąĮčāą╗ ąĖ čüą║ąŠą╗čīą║ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░čüčćąĖčéą░ą╗ 菹Įą║ąŠą┤ąĄčĆ.
čÅ ą┐čĆąĖ ąŠą┐čĆąŠčüąĄ čüč湥čéčćąĖą║ą░ ą┐čĆąŠą▓ąĄčĆčÅčÄ č鹊ą╗čīą║ąŠ ąĘąĮą░ą║ čćąĖčüą╗ą░ ą▓ čüč湥čéčćąĖą║ąĄ. ąĄčüą╗ąĖ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ, č鹊 +1, ą░ ąĄčüą╗ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠ, č鹊 -1.
_________________
ą£čāą┤čĆąŠčüčéčī ą┐čĆąĖčģąŠą┤ąĖčé ą▓ą╝ąĄčüč鹥 čü ąĖą╝ą┐ąŠč鹥ąĮčåąĖąĄą╣...
ąÜąŠą│ą┤ą░ ąĮą░ čĆčāčüčüą║ąŠą╝ č乊čĆčāą╝ąĄ ą┐ąĄčĆąĄčģąŠą┤čÅčé ąĮą░ ąÆčŗ, ą▓ čĆąĄą░ą╗čīąĮąŠą╣ ąČąĖąĘąĮąĖ ąĮą░čćąĖąĮą░čÄčé ą▒ąĖčéčī ą╝ąŠčĆą┤čā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SfS
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ 12 ąĖ 24 čēąĄą╗čćą║ą░ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 30, 2024 09:56:22 |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 12, 2007 11:21:39
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13333
ą×čéą║čāą┤ą░: ąóąŠą╝čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
čā ą╝ąĄąĮčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, čüč湥čéčćąĖą║ 菹Įą║ąŠą┤ąĄčĆą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ 3 čĆą░ąĘą░ ąĘą░ čüąĄą║čāąĮą┤čā. ąĖ ą╝ąĮąĄ ąĮąĄ ą▓ą░ąČąĮąŠ, ąĮą░ ą║ą░ą║ąŠą╣ čāą│ąŠą╗ čÅ ąĄą│ąŠ ą┐ąŠą▓ąĄčĆąĮčāą╗ ąĖ čüą║ąŠą╗čīą║ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░čüčćąĖčéą░ą╗ 菹Įą║ąŠą┤ąĄčĆ.
čÅ ą┐čĆąĖ ąŠą┐čĆąŠčüąĄ čüč湥čéčćąĖą║ą░ ą┐čĆąŠą▓ąĄčĆčÅčÄ č鹊ą╗čīą║ąŠ ąĘąĮą░ą║ čćąĖčüą╗ą░ ą▓ čüč湥čéčćąĖą║ąĄ. ąĄčüą╗ąĖ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ, č鹊 +1, ą░ ąĄčüą╗ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠ, č鹊 -1. ąś čéą░ą║ ą╝ąŠąČąĮąŠ. ąÆčüąĄ ąČ ąŠčé ąĘą░ą┤ą░čćąĖ ąĘą░ą▓ąĖčüąĖčé. ąĢčüą╗ąĖ čĆčāą║ąŠą╣ ą▓ąĄčĆč鹥čéčī - čŹč鹊 ą┐čĆąĄą║čĆą░čüąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé. ąÉ ą▓ąŠčé ąĖąĘą╝ąĄčĆąĖčéčī ą▒ąŠą╗ąĄąĄ-ą╝ąĄąĮąĄąĄ č鹊čćąĮąŠ čüą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ ą▓ą░ą╗ą░ čéą░ą║ ąĮąĄ ą▓čŗą╣ą┤ąĄčé čāąČąĄ. ąóą░ą╝ ąĮą░ą┤ąŠ čüčćąĖčéą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ ąĘą░ ą▓čĆąĄą╝čÅ ąĖ ą┐čĆąŠčć.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 3 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 61 ] |
, , , |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 13 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|










