


| –§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç https://radiokot.ru/forum/ |
|
| Stm32 (nucleo-h743zi2) SPI, CAN https://radiokot.ru/forum/viewtopic.php?f=59&t=180053 |
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1 |
| –ê–≤—Ç–æ—Ä: | anatoliydenisenko44 [ –ß—Ç –¥–µ–∫ 09, 2021 01:40:15 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Stm32 (nucleo-h743zi2) SPI, CAN |
–í—Å–µ–º –ø—Ä–∏–≤–µ—Ç. –í–æ–∑–º–æ–∂–Ω–æ —è –æ—á–µ—Ä–µ–¥–Ω–æ–π —Å–ø–∞–º–µ—Ä, –Ω–æ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–∏ –Ω—É–∂–Ω–æ–π –º–Ω–µ –Ω–µ –Ω–∞—à–µ–ª –Ω–∞ –ø—Ä–æ—Å—Ç–æ—Ä–∞—Ö –∏–Ω—Ç–µ—Ä–Ω–µ—Ç. –ò —Å–ø—É—Å—Ç—è 3 –¥–Ω—è –∫—Ä—É—á–µ–Ω–∏—è –∏ —Ç–∞–Ω—Ü–µ–≤ —Å –±—É–±–Ω–æ–º - –ø—Ä–æ—à—É –æ –ø–æ–º–æ—â–∏. –í –æ–±—â–µ–º –µ—Å—Ç—å –ø–ª–∞—Ç–∞ nucleo-144 h743zi2. –ò –≤ –Ω–µ–π –µ—Å—Ç—å CAN –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å, —á–µ—Ä–µ–∑ –∫–æ—Ç–æ—Ä—ã–π –º–Ω–µ –Ω—É–∂–Ω–æ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –ø—Ä–æ—Ç–æ–∫–æ–ª –ø–µ—Ä–µ–¥–∞—á–∏. –í —Å–≤—è–∑–∫–µ Uno + mcp2515 –ø—Ä–æ—Ç–æ–∫–æ–ª –±—ã–ª –æ—Ç—Ä–∞–±–æ—Ç–∞–Ω –∏ –≤—Å–µ —Ä–∞–±–æ—Ç–∞–µ—Ç –∫–∞–∫ —á–∞—Å—ã. –¢–µ–ø–µ—Ä—å –Ω–∞–¥–æ –≤—Å–µ –ø–µ—Ä–µ–Ω–µ—Å—Ç–∏ –Ω–∞ nucleo, –∏ —á—Ç–æ –Ω–µ –º–∞–ª–æ–≤–∞–∂–Ω–æ - —ç—Ç–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ Arduino IDE. –í –æ–±—â–µ–º —è —Ö–æ–¥–∏–ª —Å–º–æ—Ç—Ä–µ–ª –≤–∫–ª—é—á–∞–ª –≤—ã–∫–ª—é—á–∞–ª –ø–æ—Ä—Ç—ã –Ω–∞ –∫–æ—Ç–æ—Ä—ã—Ö –µ—Å—Ç—å can –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å, –Ω–æ –Ω–∏—á–µ–≥–æ –Ω–µ –ø–æ–ª—É—á–∏–ª–æ—Å—å. –ü–æ–¥—É–º–∞–ª —è —á—Ç–æ –Ω–∞–¥–æ –±—ã –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –ø–æ–¥–∫–ª—é—á–∏—Ç—å –º–æ–¥—É–ª—å mcp2515 —á–µ—Ä–µ–∑ SPI. –ò —Ç—É—Ç –≤—Å—Ç–∞–ª –≤–æ–ø—Ä–æ—Å –∞ –∫–∞–∫ –∂–µ —ç—Ç–∏ –ø–æ—Ä—Ç—ã SPI –º–Ω–µ –æ–±—å—è–≤–∏—Ç—å –≤ —Ç–æ–π –∂–µ Arduino IDE? –ú–æ–∂–µ—Ç —É –∫–æ–≥–æ —Ç–æ –µ—Å—Ç—å –ø—Ä–∏–º–µ—Ä—ã –¥–ª—è –¥—Ä—É–≥–∏—Ö –∫–∞–º–Ω–µ–π? –∏–ª–∏ –µ—Å—Ç—å –ø–æ–¥—Å–∫–∞–∑–∫–∞ –∫–∞–∫ –∏ —á—Ç–æ –∏–º–µ–Ω–Ω–æ —Å —ç—Ç–æ–π –ø–ª–∞—Ç–æ–π. –Ø –∑–Ω–∞—é —á—Ç–æ, –≤—ã —Å–∫–∞–∂–∏—Ç–µ - –ø–∏—à–∏ –Ω–∞ STM32CUBEIde ( —Ä–µ–±—è—Ç–∞, –ø–æ–∫–∞ —è –≤ –ø—Ä–æ—Ü–µ—Å—Å–µ –æ–±—É—á–µ–Ω–∏—è, —Å–ª–æ–∂–Ω—ã–π –æ–Ω, –º–µ–Ω–µ–µ –ø–æ–Ω—è—Ç–Ω—ã–π) –ö–æ–¥: #include <SPI.h>
#include <mcp2515.h> #define MOSI PB5 #define MISO PB4 #define SCLK PB3 #define ledPin PC13 #define buttonPin PA0 byte data; struct can_frame canMsg; struct can_frame canMsg1; struct can_frame canMsg2; MCP2515 mcp2515(PA4); void setup () { while (!Serial); Serial.begin(115200); mcp2515.reset(); mcp2515.setBitrate(CAN_1000KBPS, MCP_8MHZ); mcp2515.setNormalMode (); //mcp2515.setLoopbackMode(); //mcp2515.setListenOnlyMode(); Serial.println("Example: Write to CAN"); canMsg1.can_id = 0x142; canMsg1.can_dlc = 8; canMsg1.data[0] = 0x88; //—Å—Ç–∞—Ä—Ç –º–æ—Ç–æ—Ä canMsg1.data[1] = 0x00; canMsg1.data[2] = 0x00; canMsg1.data[3] = 0x00; canMsg1.data[4] = 0x00; canMsg1.data[5] = 0x00; canMsg1.data[6] = 0x00; canMsg1.data[7] = 0x00; canMsg2.can_id = 0x142; canMsg2.can_dlc = 8; canMsg2.data[0] = 0xA1; canMsg2.data[1] = 0x00; canMsg2.data[2] = 0x00; canMsg2.data[3] = 0x00; canMsg2.data[4] = 0x00; canMsg2.data[5] = 0x50; canMsg2.data[6] = 0x00; canMsg2.data[7] = 0x00; mcp2515.sendMessage(&canMsg1); } void loop(void) { mcp2515.sendMessage(&canMsg2); Serial.println("Messages sent"); if (mcp2515.readMessage(&canMsg1) == MCP2515::ERROR_OK) { Serial.print(canMsg.can_id, HEX); // print ID Serial.print(" "); for (int i = 0; i<10; i++) { // print the data Serial.print(canMsg.data[i],HEX); Serial.print(" "); } Serial.println(); } delay(1000); } |
|
| –ê–≤—Ç–æ—Ä: | Dimon456 [ –ß—Ç –¥–µ–∫ 09, 2021 08:25:47 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
–î–∞–≤–Ω–æ —Ö–æ—Ç–µ–ª –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –°–ø–æ–π–ª–µ—Ä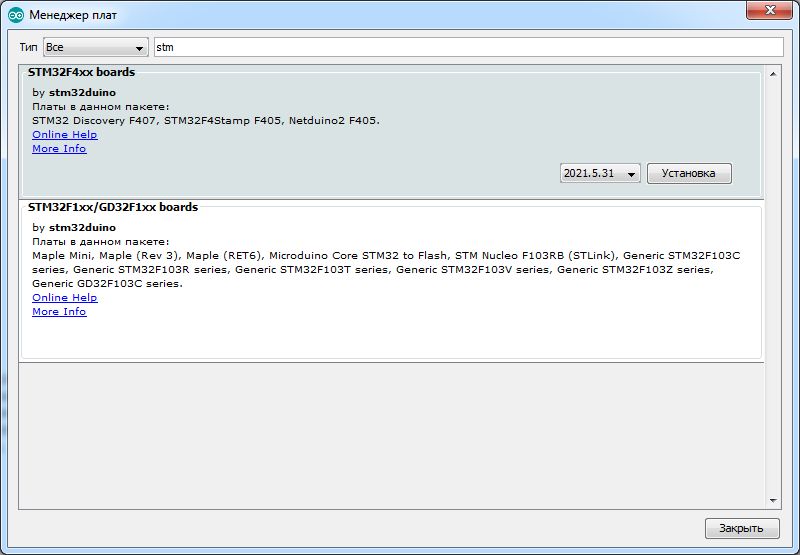 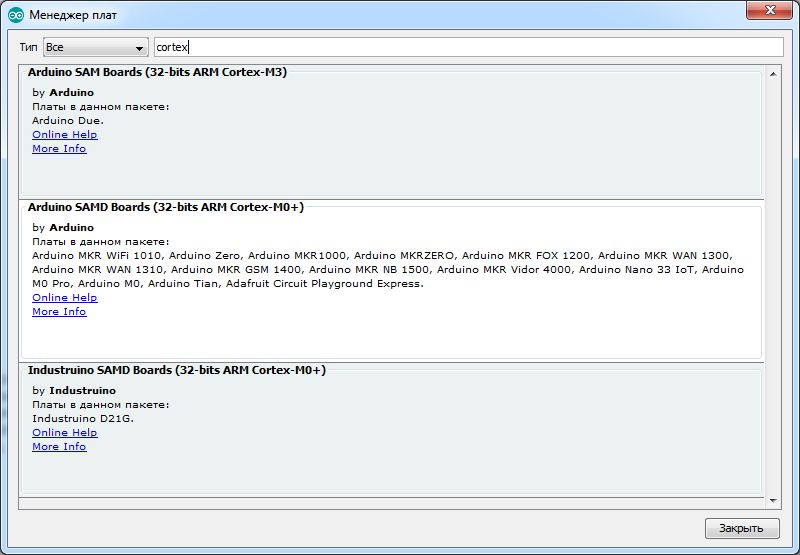 |
|
| –ê–≤—Ç–æ—Ä: | anatoliydenisenko44 [ –ß—Ç –¥–µ–∫ 09, 2021 08:35:49 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
–¢–∞, –∫–∞–∫ –ø–æ—Å—Ç–∞–≤–∏—Ç—å –ø–ª–∞—Ç—ã –≤ —Ä–µ–¥–∞–∫—Ç–æ—Ä —è –∑–Ω–∞—é. –£ –º–µ–Ω—è –±–æ–ª—å—à–µ –≤–æ–ø—Ä–æ—Å –∫–∞–∫ —Ä–∞–±–æ—Ç–∞—Ç—å —Å –ø–æ—Ä—Ç–∞–º–∏ –∞ —Ç–æ—á–Ω–µ–µ —Å –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞–º–∏ —Å–∞–º–æ–π –ø–ª–∞—Ç—ã, psi, can bus. |
|
| –ê–≤—Ç–æ—Ä: | Dimon456 [ –ß—Ç –¥–µ–∫ 09, 2021 08:52:18 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
–≠—Ç–æ –∂–µ –∞—Ä–¥—É–∏–Ω–æ, —Ç–∞–º –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å –≤—Å–µ –∑–∞—Ç–æ—á–µ–Ω–æ, –¥–æ–ª–∂–Ω—ã –±—ã—Ç—å —Ö–æ—Ç—å –∫–∞–∫–∏–µ-—Ç–æ –ø—Ä–∏–º–µ—Ä—ã. –ü–æ –∏–¥–µ–∏ –≤–∞—à, –≤—ã—à–µ –ø—Ä–∏–≤–µ–¥–µ–Ω–Ω—ã–π, –∫–æ–¥ –¥–æ–ª–∂–µ–Ω —Å–æ–±—Ä–∞—Ç—å—Å—è –ø–æ–¥ –ª—é–±—É—é –ø–ª–∞—Ç—É. –£ –º–Ω—É —Ç–∞–∫–∏—Ö –ø–ª–∞—Ç –Ω–µ—Ç—É, –µ—Å—Ç—å f030 –∏ f100, –≤ —Å–ø–∏—Å–∫–µ –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ–º—ã—Ö –∏—Ö –Ω–µ—Ç, –∏ –ø—ã—Ç–∞—Ç—å—Å—è –ø—Ä–æ–≤–µ—Ä—è—Ç—å –Ω–µ –±—É–¥—É. –£—Å—Ç–∞–Ω–æ–≤—â–∏–∫ –∞—Ä–¥—É–∏–Ω–æ –¥–æ–ª–∂–µ–Ω —Å–∫–∞—á–∞—Ç—å –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä gcc_arm, –æ–¥–Ω–∏–º —Å–ª–æ–≤–æ–º, –ø—Ä–æ–≤–µ—Ä—è–π—Ç–µ —Å–∞–º–∏. |
|
| –ê–≤—Ç–æ—Ä: | oleg110592 [ –ß—Ç –¥–µ–∫ 09, 2021 09:07:32 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
–ü–æ–¥—É–º–∞–ª —è —á—Ç–æ –Ω–∞–¥–æ –±—ã –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –ø–æ–¥–∫–ª—é—á–∏—Ç—å –º–æ–¥—É–ª—å mcp2515 —á–µ—Ä–µ–∑ SPI. –ò —Ç—É—Ç –≤—Å—Ç–∞–ª –≤–æ–ø—Ä–æ—Å –∞ –∫–∞–∫ –∂–µ —ç—Ç–∏ –ø–æ—Ä—Ç—ã SPI –º–Ω–µ –æ–±—å—è–≤–∏—Ç—å –≤ —Ç–æ–π –∂–µ Arduino IDE? –≤–∏–∫–∏ —Å—Ç—Ä–∞–Ω–∏—Ü–∞ –ê–ü–ò stm32duino: https://github.com/stm32duino/wiki/wiki/API#spi –ö–æ–¥: #include <SPI.h>
// MOSI MISO SCLK SPIClass SPI3(PC12, PC11, PC10); void setup() { SPI3.begin(2); //Enables the SPI3 instance with default settings and attaches the CS pin SPI3.beginTransaction(1, settings); //Attaches another CS pin and configure the SPI3 instance with other settings SPI3.transfer(2, 0x52); //Transfers data to the first device SPI3.transfer(1, 0xA4); //Transfers data to the second device. The SPI3 instance is configured with the right settings SPI3.end() //SPI3 instance is disabled } |
|
| –ê–≤—Ç–æ—Ä: | Dimon456 [ –ß—Ç –¥–µ–∫ 09, 2021 14:18:17 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
–°–ø–∏—Å–æ–∫ –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ–º—ã—Ö STM32 –¥–æ–≤–æ–ª—å–Ω–æ —à–∏—Ä–æ–∫ –°–ø–æ–π–ª–µ—Ä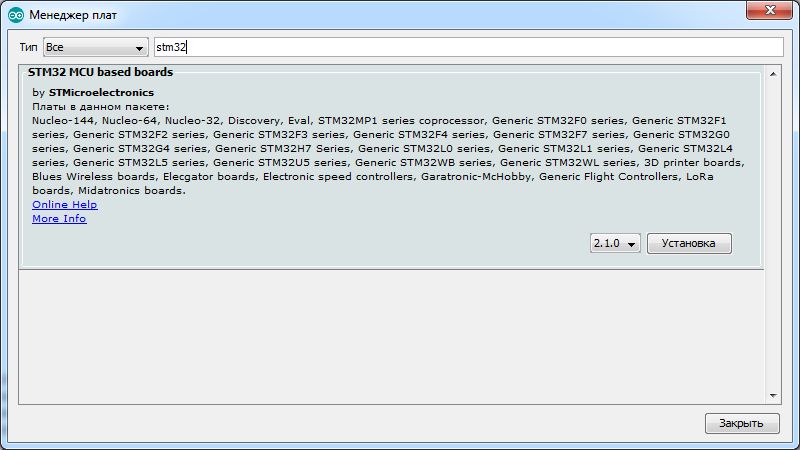 –û—á–µ–Ω—å –æ—á–µ–Ω—å –¥–æ–ª–≥–æ —Å–±–æ—Ä–∫–∞ –∏–¥–µ—Ç, –º–æ–∂–Ω–æ –¥–≤–∞ —Ä–∞–∑–∞ –ø–æ—Å–ø–∞—Ç—å. –ê—Ä–¥—É–∏–Ω–æ–≤—Å–∫–∏–π Blink –ø–æ–¥ STM32F100RB –≤ –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–π –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏–∏ –¶–∏—Ç–∞—Ç–∞: –°–∫–µ—Ç—á –∏—Å–ø–æ–ª—å–∑—É–µ—Ç 7544 –±–∞–π—Ç (5%) –ø–∞–º—è—Ç–∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞. –í—Å–µ–≥–æ –¥–æ—Å—Ç—É–ø–Ω–æ 131072 –±–∞–π—Ç. –ì–ª–æ–±–∞–ª—å–Ω—ã–µ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –∏—Å–ø–æ–ª—å–∑—É—é—Ç 868 –±–∞–π—Ç (10%) –¥–∏–Ω–∞–º–∏—á–µ—Å–∫–æ–π –ø–∞–º—è—Ç–∏, –æ—Å—Ç–∞–≤–ª—è—è 7324 –±–∞–π—Ç –¥–ª—è –ª–æ–∫–∞–ª—å–Ω—ã—Ö –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö. –ú–∞–∫—Å–∏–º—É–º: 8192 –±–∞–π—Ç. –°–ø–æ–π–ª–µ—Ä–ö–æ–¥: // the setup function runs once when you press reset or power the board void setup() { // initialize digital pin LED_BUILTIN as an output. pinMode(LED_BUILTIN, OUTPUT); } // the loop function runs over and over again forever void loop() { digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level) delay(1000); // wait for a second digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW delay(1000); // wait for a second } –¢–∞–∫–æ–π –∫–æ–¥ –°–ø–æ–π–ª–µ—Ä–ö–æ–¥: void setup () { Serial.begin (9600); // –ó–∞–¥–∞–µ–º —Å–∫–æ—Ä–æ—Å—Ç—å –æ–±–º–µ–Ω–∞ uart-–ø–æ—Ä—Ç–∞ 9600 Serial.println ("Hello World!"); // –ü–∏—à–µ–º –≤ –∫–æ–Ω—Å–æ–ª—å "Hello World!" } void loop () { } –¶–∏—Ç–∞—Ç–∞: –°–∫–µ—Ç—á –∏—Å–ø–æ–ª—å–∑—É–µ—Ç 7692 –±–∞–π—Ç (5%) –ø–∞–º—è—Ç–∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞. –í—Å–µ–≥–æ –¥–æ—Å—Ç—É–ø–Ω–æ 131072 –±–∞–π—Ç. –ì–ª–æ–±–∞–ª—å–Ω—ã–µ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –∏—Å–ø–æ–ª—å–∑—É—é—Ç 868 –±–∞–π—Ç (10%) –¥–∏–Ω–∞–º–∏—á–µ—Å–∫–æ–π –ø–∞–º—è—Ç–∏, –æ—Å—Ç–∞–≤–ª—è—è 7324 –±–∞–π—Ç –¥–ª—è –ª–æ–∫–∞–ª—å–Ω—ã—Ö –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö. –ú–∞–∫—Å–∏–º—É–º: 8192 –±–∞–π—Ç. –í —Ä–∞–±–æ—Ç–µ –Ω–∞ —Ä–µ–∞–ª—å–Ω–æ–º —É—Å—Ç—Ä–æ–π—Å—Ç–≤–µ –Ω–µ –ø—Ä–æ–≤–µ—Ä—è–ª–æ—Å—å, –Ω–∞ –Ω–∞ –≤—ã—Ö–æ–¥–µ —Å–æ–∑–¥–∞–µ—Ç—Å—è hex bin elf map –∫—É—á–∞ –æ–±—ä–µ–∫—Ç–Ω–∏–∫–æ–≤, —Ä–∞–∑–º–µ—Ä bin –ø–æ—Å–ª–µ–¥–Ω–µ–≥–æ –∫–æ–¥–∞ 8176 –±–∞–π—Ç–∞. –ü—Ä—è–º–∞—è –∑–∞–≥—Ä—É–∑–∫–∞ –∏–∑ –ê—Ä–¥—É–∏–Ω–æ –∏–¥–µ –Ω–µ –ø—Ä–æ–≤–µ—Ä—è–ª–∞—Å—å, —Ç–∞–∫ –∫–∞–∫ —Ç—Ä–µ–±—É–µ—Ç—Å—è –µ—â–µ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å stm32cubeprg. –í–æ—Ç –∫—É—Å–æ–∫ –∏–∑ map —Ñ–∞–π–ª–∞ –°–ø–æ–π–ª–µ—Ä–ö–æ–¥: 0x20002000 _estack = (ORIGIN (RAM) + LENGTH (RAM)) 0x00000200 _Min_Heap_Size = 0x200 0x00000400 _Min_Stack_Size = 0x400 .isr_vector 0x08000000 0x1d0 0x08000000 . = ALIGN (0x4) *(.isr_vector) .isr_vector 0x08000000 0x1d0 C:\Users\xxx\AppData\Local\Temp\arduino_cache_441161\core\core_cd72577ee8b54c7a4a749e3b95957d2b.a(startup_stm32yyxx.S.o) 0x08000000 g_pfnVectors 0x080001d0 . = ALIGN (0x4) .text 0x080001d0 0x1b84 0x080001d0 . = ALIGN (0x4) *(.text) .text 0x080001d0 0x1510 C:\Users\xxx\AppData\Local\Temp\sketch_dec09a.ino.elf.c7TRF4.ltrans0.ltrans.o 0x080013bc _sbrk 0x080013f8 _close 0x080013fe _fstat 0x08001408 _isatty 0x0800140c _lseek 0x08001410 _read 0x08001414 _exit 0x08001416 _kill 0x08001428 _getpid 0x0800142c SysTick_Handler 0x0800143c SystemInit 0x0800148c USART1_IRQHandler 0x080014a4 USART2_IRQHandler 0x080014c0 USART3_IRQHandler 0x080014dc EXTI0_IRQHandler 0x080014e0 EXTI1_IRQHandler 0x080014e4 EXTI2_IRQHandler 0x080014e8 EXTI3_IRQHandler 0x080014ec EXTI4_IRQHandler 0x080014f0 EXTI9_5_IRQHandler 0x08001506 EXTI15_10_IRQHandler 0x0800151e TIM1_UP_TIM16_IRQHandler 0x08001520 TIM1_CC_IRQHandler 0x08001522 TIM2_IRQHandler 0x08001524 TIM3_IRQHandler 0x08001526 TIM4_IRQHandler 0x08001528 TIM6_DAC_IRQHandler 0x0800152a TIM7_IRQHandler 0x0800152c TIM1_BRK_TIM15_IRQHandler 0x0800152e TIM1_TRG_COM_TIM17_IRQHandler 0x08001530 _write 0x080016d4 __cxa_pure_virtual 0x080016d6 operator delete(void*) 0x080016da operator delete(void*, unsigned int) *(.text*) .text.__do_global_dtors_aux 0x080016e0 0x24 c:/users/xxx/appdata/local/arduino15/packages/stmicroelectronics/tools/xpack-arm-none-eabi-gcc/10.2.1-1.1/bin/../lib/gcc/arm-none-eabi/10.2.1/thumb/v7-m/nofp/crtbegin.o .text.frame_dummy 0x08001704 0x1c c:/users/xxx/appdata/local/arduino15/packages/stmicroelectronics/tools/xpack-arm-none-eabi-gcc/10.2.1-1.1/bin/../lib/gcc/arm-none-eabi/10.2.1/thumb/v7-m/nofp/crtbegin.o .text.startup 0x08001720 0x3ec C:\Users\xxx\AppData\Local\Temp\sketch_dec09a.ino.elf.c7TRF4.ltrans0.ltrans.o 0x080019a0 main .text.exit 0x08001b0c 0x24 C:\Users\xxx\AppData\Local\Temp\sketch_dec09a.ino.elf.c7TRF4.ltrans0.ltrans.o .text.Reset_Handler 0x08001b30 0x48 C:\Users\xxx\AppData\Local\Temp\arduino_cache_441161\core\core_cd72577ee8b54c7a4a749e3b95957d2b.a(startup_stm32yyxx.S.o) 0x08001b30 Reset_Handler .text.Default_Handler 0x08001b78 0x2 C:\Users\xxx\AppData\Local\Temp\arduino_cache_441161\core\core_cd72577ee8b54c7a4a749e3b95957d2b.a(startup_stm32yyxx.S.o) 0x08001b78 RTC_Alarm_IRQHandler 0x08001b78 DebugMon_Handler 0x08001b78 HardFault_Handler 0x08001b78 PVD_IRQHandler 0x08001b78 PendSV_Handler 0x08001b78 NMI_Handler 0x08001b78 UsageFault_Handler 0x08001b78 SPI1_IRQHandler 0x08001b78 TAMPER_IRQHandler 0x08001b78 DMA1_Channel4_IRQHandler 0x08001b78 ADC1_IRQHandler 0x08001b78 RTC_IRQHandler 0x08001b78 DMA1_Channel7_IRQHandler 0x08001b78 I2C1_EV_IRQHandler 0x08001b78 DMA1_Channel6_IRQHandler 0x08001b78 RCC_IRQHandler 0x08001b78 DMA1_Channel1_IRQHandler 0x08001b78 Default_Handler 0x08001b78 CEC_IRQHandler 0x08001b78 MemManage_Handler 0x08001b78 SVC_Handler 0x08001b78 DMA1_Channel5_IRQHandler 0x08001b78 DMA1_Channel3_IRQHandler 0x08001b78 WWDG_IRQHandler 0x08001b78 DMA1_Channel2_IRQHandler 0x08001b78 FLASH_IRQHandler 0x08001b78 BusFault_Handler 0x08001b78 I2C1_ER_IRQHandler –ò –¥–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω–æ +1,3 –ì–∏–≥–∞–±–∞–π—Ç–∞ –º—É—Å–æ—Ä–∞ –Ω–∞ –∂–µ—Å—Ç–∫–æ–º –¥–∏—Å–∫–µ. |
|
| –ê–≤—Ç–æ—Ä: | –Ø—Ä–æ—Å–ª–∞–≤555 [ –ß—Ç –¥–µ–∫ 09, 2021 15:32:44 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
–∞ –¥–∞–ª—å—à–µ –ø–æ–ª–Ω—ã–π –±—Ä–µ–¥, –∫–∞–∫–∏–º –æ–Ω –±—ã–ª, —Ç–∞–∫–∏–º –∏ –æ—Å—Ç–∞–ª—Å—è. –û—á–µ–Ω—å –æ—á–µ–Ω—å –¥–æ–ª–≥–æ —Å–±–æ—Ä–∫–∞ –∏–¥–µ—Ç, –º–æ–∂–Ω–æ –¥–≤–∞ —Ä–∞–∑–∞ –ø–æ—Å–ø–∞—Ç—å. –ù–µ–¥–∞–≤–Ω–æ –º–Ω–µ –ø—Ä–∏—à–ª–æ—Å—å –¥–µ–ª–∞—Ç—å –ø—Ä–æ–µ–∫—Ç –ø–æ–¥ –Ω–æ—Ä–¥–∏–∫ —á–µ—Ä–µ–∑ –∞—Ä–¥—É–∏–Ω—É - –∑–∞—Ö–æ—Ç–µ–ª –∫–ª–∏–µ–Ω—Ç –∏ –≤—Å–µ —Ç—É—Ç. –Ø –ø—Ä–æ–∫–ª—è–ª –≤—Å–µ –Ω–∞ —Å–≤–µ—Ç–µ, –∑–∞ —Ç–æ —á—Ç–æ —Å–≤—è–∑–∞–ª—Å—è —Å —ç—Ç–∏–º –≥–æ–≤–Ω–æ–º. –í–æ –ø–µ—Ä–≤—ã—Ö –æ—Ç–ª–∞–¥–∫–∞ - –æ–Ω–∞ —Ç–∏–ø–∞ –µ—Å—Ç—å, –Ω–æ –µ—â–µ —Ç–∏–ø–∞ –Ω–µ—Ç. –ö–∞–∫-—Ç–æ —É–¥–∞–ª–æ—Å—å –ø–æ–¥—Ü–µ–ø–∏—Ç—å –¥–∂–∏–ª–∏–Ω–∫ –∏ –∑–∞–≤–µ—Å—Ç–∏ –≤–∏–∂—É–∞–ª —Å—Ç—É–¥–∏—é. –û—á–µ—Ä–µ–¥–Ω–æ–π —Å—é—Ä–ø—Ä–∏–∑ - –æ–ø—Ç–∏–º–∏–∑–∞—Ü–∏—è –∂—Ä–µ—Ç –∫–æ–¥, –Ω–µ–≤–æ–∑–º–æ–∂–Ω–æ —Ç–ª–∞–∂–∏–≤–∞—Ç—å. –ò–¥—É –±–µ–∑ –∑–∞–¥–Ω–µ–π –º—ã—Å–ª–∏ –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∏, –æ—Ç—Ä—É–±–∞—é –æ–ø–∏—Ç–∏–º–∏–∑–∞—Ü–∏—é –∏ –ø—Ä–∏–µ—Ö–∞–ª–∏! –≠—Ç–∏ –¥–µ–±–∏–ª—ã —Ç–∞–∫ –Ω–∞–ø–∏—Å–∞–ª–∏ —Å–≤–æ–∏ –≥–æ–≤–Ω–æ–∏–Ω–æ –±–∏–±–ª–∏–æ—Ç–µ–∫–∏, —á—Ç–æ –æ–Ω–∏ –±–µ–∑ –æ–ø—Ç–∏–º–∏–∑–∞—Ü–∏–∏ –Ω–µ —Å–æ–±–∏—Ä–∞—é—Ç—Å—è! –ü–æ—Ç–æ–º—É —á—Ç–æ –µ—Å—Ç—å –Ω–µ—Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω–Ω—ã–µ –≤–∏—Ä—Ç—É–∞–ª—å–Ω—ã–µ –º–µ—Ç–æ–¥—ã –≤ –∫–ª–∞—Å–∞—Ö. –ö–æ–≥–¥–∞ —Ä–∞–±–æ—Ç–∞–µ—Ç –æ–ø—Ç–∏–º–∏–∑–∞—Ü–º—è - –æ–Ω–∏ —Ä–µ–∂—É—Ç—Å—è –∏ –≤—Å–µ –≤—Ä–æ–¥–µ –æ–∫. –ù–æ —Å—Ç–æ–∏—Ç –æ—Ç—Ä—É–±–∏—Ç—å —ç—Ç–æ –≤—Å–µ - –∏ –ø—Ä–∏–µ—Ö–∞–ª–∏. –ü–æ—á–µ–º—É –¥–æ–ª–≥–æ —Å–æ–±–∏—Ä–∞–µ—Ç? –ü–æ—Ç–æ–º—É —á—Ç–æ —ç—Ç–æ –≥–æ–≤–Ω–æ (–≤–∏–∂—É–∞–ª —Å—Ç—É–¥–∏—è) —Å–∫–∞–Ω–∏—Ä—É–µ—Ç –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ –∫–∞–∂–¥—ã–π —Ä–∞–∑ –ø—Ä–∏ —Å–±–æ—Ä–∫–µ. –¢–µ–ø–µ—Ä—å –ø—Ä–æ –∫–∞–Ω –∏ H743. –ß–µ–ª, —Ç—ã –≤–æ–æ–±—â–µ –¥–∞—Ç–∞—à–∏—Ç –æ—Ç–∫—Ä—ã–≤–∞–ª? –¢—ã –≤–∏–¥–µ–ª —Å—Ç—Ä—É–∫—Ç—É—Ä—É —á–∏–ø–∞, —Å–∫–æ–ª—å–∫–æ —Ç–∞–º —Ä–∞–∑–Ω—ã—Ö –±–∞–Ω–æ–∫ –ø–∞–º—è—Ç–∏, —Å–∫–æ–ª—å–∫–æ —Ç–∞–º —à–∏–Ω, —á—Ç–æ —Ç–∞–º –µ—Å—Ç—å –∫–µ—à, –∫–∞–∫–æ–µ —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–ª–æ–∂–Ω–æ–µ? –ß—Ç–æ —Ç–∞–º –≤–æ–æ–±—â–µ-—Ç–æ –Ω–µ CAN, –∞ FDCAN? –£ –º–µ–Ω—è –µ—Å—Ç—å –ø—Ä–æ–µ–∫—Ç –Ω–∞ H743 —Å –∫–∞–Ω–æ–º. –ò –æ–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç. –ù–µ –≤—ã–¥–µ–ª—ã–≤–∞–π—Å—è - —Å—Ç–∞–≤—å CubeIde. –î–µ–ª–∞–π –ø—Ä–æ–µ–∫—Ç —á–µ—Ä–µ–∑ –≤–∏–∑–∞—Ä–¥ - —Å—Ä–µ–¥–∞ —Å–∫–∞—á–∞–µ—Ç –Ý–ï–ü–û–ó–ò–¢–û–Ý–ò–ô. –ò —Ç–∞–º –≤ —Ä–µ–ø–æ–∑–∏—Ç–æ—Ä–∏–∏ –∫—Ä–æ–º–µ –±–∏–±–ª–∏–æ—Ç–µ–∫ –±—É–¥—É—Ç —Ä–∞–±–æ—á–∏–µ –ü–Ý–ò–ú–ï–Ý–´. –ï—Å–ª–∏ —É —Ç–µ–±—è –∑–∞–¥–∞—á–∞ –Ω–µ —Å–ª–æ–∂–Ω–∞—è, –º–æ–∂–Ω–æ –ø—Ä—è–º–æ –≤–∑—è—Ç—å –≥–æ—Ç–æ–≤—ã–π –ø—Ä–∏–º–µ—Ä –∑–∞ –æ—Å–Ω–æ–≤—É –∏ —Å–ª–µ–≥–∫–∞ –ø–µ—Ä–µ–¥–µ–ª–∞—Ç—å. –ë–æ–ª–µ–µ —Ç–æ–≥–æ, –¥–ª—è —Ç–∞–∫–∏—Ö —á—É–≤–∞–∫–æ–≤ –¥–∞–∂–µ —Å–¥–µ–ª–∞–ª–∏ —Å–ø–µ—Ü–∏–∞–ª—å–Ω—ã–π –ò–ú–ü–û–Ý–¢ –ø—Ä–∏–º–µ—Ä–æ–≤ –∏–∑ —Ä–µ–ø–æ–∑–∏—Ç–æ—Ä–∏—è –∫—É–¥–∞ –Ω–∞–¥–æ. –§–∞–π–ª-–ò–º–ø–æ—Ä—Ç-–î–∂–µ–Ω–µ—Ä–∞–ª-–ò–º–ø–æ—Ä—Ç —Å—Ç–º32–∫—É–± —ç–∫–∑–∞–º–ø–ª. |
|
| –ê–≤—Ç–æ—Ä: | anatoliydenisenko44 [ –ß—Ç –¥–µ–∫ 09, 2021 18:31:03 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
–Ø –ø–ª–∞—Ç—ã —É—Å—Ç–∞–Ω–æ–≤–∏–ª, –ø–æ–¥–¥–µ—Ä–∂–∫—É –Ω—É–∂–Ω–æ–π –º–Ω–µ stm32 –≤—Å–µ –µ—Å—Ç—å. –ù–∞ –ø–ª–∞—Ç–µ Uno + mcp2515 —è –ø—Ä–æ—Ç–æ–∫–æ–ª –¥–ª—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Ä–µ–∞–ª–∏–∑–æ–≤–∞–ª, –Ω–æ —Ç–∞–º –ø—Ä–æ—Å—Ç–æ —É –∞—Ä–¥—É–∏–Ω—ã –æ–¥–∏–Ω SPI –∏ —è –≤ –Ω–µ–≥–æ. –ò –≤–æ—Ç –≤—Å—Ç–∞–ª –≤–æ–ø—Ä–æ—Å —á—Ç–æ –±—ã —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å —ç—Ç–æ –≤—Å–µ –¥–ª—è stm32 –∏ arduino ide. –ò —è –ø–æ–¥–∫–ª—é—á–∞—é –º–æ–¥—É–ª—å mcp2515 –≤ —Ä–∞–∑–º–µ—Ç–∫—É –ø–æ –ø–∏–Ω–∞–º SPI1  –ò —á—Ç–æ –º–Ω–µ –¥–µ–ª–∞—Ç—å –¥–∞–ª—å—à–µ —á—Ç–æ –±—ã —ç—Ç–æ —á—É–¥–æ –Ω–∞—á–∞–ª–æ —Ä–∞–±–æ—Ç–∞—Ç—å? –ö–æ–¥: #include <SPI.h>
#include <mcp2515.h> #include <ros2arduino.h> #include <user_config.h> //#define VSPI_CLOCK_PIN 39 //4 //#define VSPI_MOSI_PIN 36 // 15 //#define VSPI_MISO_PIN 38//32 #define VSPI_CS_MCP2515_PIN 5//34//25 #define RMD_X6_READ_PID_DATA (0x30) #define RMD_X6_WRITE_PID_TO_RAM (0x31) #define RMD_X6_WRITE_PID_TO_ROM (0x32) #define RMD_X6_READ_ACCELERATION (0x33) #define RMD_X6_WRITE_ACCELERATION (0x34) #define RMD_X6_READ_ENCODE_DATA (0x90) #define RMD_X6_WRITE_ENCODER_OFFSET (0x91) #define RMD_X6_WRITE_CURRENT_POSITION (0x19) #define RMD_X6_READ_MULTI_TURNS_ANGLE (0x92) #define RMD_X6_READ_SINGLE_CIRCLE_ANGLE (0x94) #define RMD_X6_READ_MOTOR_STATUS (0x9A) #define RMD_X6_CLEAR_MOTOR_ERROR_FLAG (0x9B) #define RMD_X6_READ_MOTOR_STATUS_2 (0x9C) #define RMD_X6_READ_MOTOR_STATUS_3 (0x9D) #define RMD_X6_MOTOR_OFF (0x80) #define RMD_X6_MOTOR_STOP (0x81) #define RMD_X6_MOTOR_RUNNING (0x88) #define RMD_X6_TORQUE_CLOSED_LOOP (0xA1) #define RMD_X6_SPEED_CLOSED_LOOP (0xA2) #define RMD_X6_POSITION_CTRL_1 (0xA3) #define RMD_X6_POSITION_CTRL_2 (0xA4) #define RMD_X6_POSITION_CTRL_3 (0xA5) #define RMD_X6_POSITION_CTRL_4 (0xA6) #define RMD_X6_POSITION (0xA7) #define RMD_X6_STATUS_NULL (0x00) struct can_frame canMsg; MCP2515 can(VSPI_CS_MCP2515_PIN); //10 //RMD_X6_CAN_MSG_ID unsigned long leftFrontWheel = 0x142; // –ø–µ—Ä–µ–¥–Ω–∏–π –ª–µ–≤—ã–π unsigned long leftBackWheel = 0x141; // –∑–∞–¥–Ω–∏–π –ª–µ–≤—ã–π unsigned long rightFrontWheel = 0x144; // –ø–µ—Ä–µ–¥–Ω–∏–π –ø—Ä–∞–≤—ã–π unsigned long rightBackWheel = 0x143; // –∑–∞–¥–Ω–∏–π –ø—Ä–∞–≤—ã–π long wheelSpeed = 500; long wheelPos = 3600; //long GenPos1=-2600; //Left //long GenPos2= 2600; //Righ int8_t temperatureMotor; int16_t torqueCurrentMotor; int16_t speedMotor; uint16_t encoderMotor; void motorRun(unsigned long id) { canMsg.can_id = id; canMsg.can_dlc = 8; canMsg.data[0] = RMD_X6_MOTOR_RUNNING; canMsg.data[1] = RMD_X6_STATUS_NULL; canMsg.data[2] = RMD_X6_STATUS_NULL; canMsg.data[3] = RMD_X6_STATUS_NULL; canMsg.data[4] = RMD_X6_STATUS_NULL; canMsg.data[5] = RMD_X6_STATUS_NULL; canMsg.data[6] = RMD_X6_STATUS_NULL; canMsg.data[7] = RMD_X6_STATUS_NULL; can.sendMessage(&canMsg); } void motorStop(unsigned long id) { canMsg.can_id = id; canMsg.can_dlc = 8; canMsg.data[0] = RMD_X6_MOTOR_STOP; canMsg.data[1] = RMD_X6_STATUS_NULL; canMsg.data[2] = RMD_X6_STATUS_NULL; canMsg.data[3] = RMD_X6_STATUS_NULL; canMsg.data[4] = RMD_X6_STATUS_NULL; canMsg.data[5] = RMD_X6_STATUS_NULL; canMsg.data[6] = RMD_X6_STATUS_NULL; canMsg.data[7] = RMD_X6_STATUS_NULL; can.sendMessage(&canMsg); } void motorOff(unsigned long id) { canMsg.can_id = id; canMsg.can_dlc = 8; canMsg.data[0] = RMD_X6_MOTOR_OFF;//RMD_X6_MOTOR_STOP; canMsg.data[1] = RMD_X6_STATUS_NULL; canMsg.data[2] = RMD_X6_STATUS_NULL; canMsg.data[3] = RMD_X6_STATUS_NULL; canMsg.data[4] = RMD_X6_STATUS_NULL; canMsg.data[5] = RMD_X6_STATUS_NULL; canMsg.data[6] = RMD_X6_STATUS_NULL; canMsg.data[7] = RMD_X6_STATUS_NULL; can.sendMessage(&canMsg); } void readReply() { Serial.print(canMsg.can_id, HEX); // print ID Serial.print(" "); Serial.print(canMsg.can_dlc, HEX); // print DLC Serial.print(" "); for (int i = 0; i<canMsg.can_dlc; i++) { // print the data Serial.print(canMsg.data[i],HEX); Serial.print(" "); } Serial.println(); // Get motor temperature temperatureMotor = (int8_t)canMsg.data[1]; // Get motor torque current torqueCurrentMotor = (int16_t(canMsg.data[2]) << 8) | canMsg.data[3]; // Get motor speed speedMotor = (int16_t(canMsg.data[4]) << 8) | canMsg.data[5]; // Get motor encoder encoderMotor = (uint16_t(canMsg.data[6]) << 8) | canMsg.data[7]; // Cover dps to rpm speedMotor = speedMotor*60; speedMotor = speedMotor/360; Serial.print(temperatureMotor); Serial.print(" "); Serial.print(torqueCurrentMotor); Serial.print(" "); Serial.print(speedMotor); Serial.print(" "); Serial.print(encoderMotor); Serial.print(" "); } void setPosition(unsigned long id, long wheelPos) { // Convert 1degree/LSB to 0.01degree/LSB wheelPos = wheelPos * 100; wheelPos = wheelPos * 6; canMsg.can_id = id; canMsg.can_dlc = 8; canMsg.data[0] = RMD_X6_POSITION_CTRL_1; canMsg.data[1] = RMD_X6_STATUS_NULL; canMsg.data[2] = RMD_X6_STATUS_NULL; canMsg.data[3] = RMD_X6_STATUS_NULL; canMsg.data[4] = wheelPos; canMsg.data[5] = wheelPos >> 8; canMsg.data[6] = wheelPos >> 16; canMsg.data[7] = wheelPos >> 24; can.sendMessage(&canMsg); delay(3); } void setVelocity(unsigned long id, long wheelSpeed) { // Cover rpm to dps wheelSpeed = wheelSpeed*360; wheelSpeed = wheelSpeed/60; // Cover 1dsp/LSB to 0.01dsp/LSB wheelSpeed = wheelSpeed * 100; canMsg.can_id = id; canMsg.can_dlc = 8; canMsg.data[0] = RMD_X6_SPEED_CLOSED_LOOP; canMsg.data[1] = RMD_X6_STATUS_NULL; canMsg.data[2] = RMD_X6_STATUS_NULL; canMsg.data[3] = RMD_X6_STATUS_NULL; canMsg.data[4] = wheelSpeed; canMsg.data[5] = wheelSpeed >> 8; canMsg.data[6] = wheelSpeed >> 16; canMsg.data[7] = wheelSpeed >> 24; can.sendMessage(&canMsg); delay(3); } void moveForward() { setVelocity(leftFrontWheel, wheelSpeed); setVelocity(leftBackWheel, wheelSpeed); setVelocity(rightFrontWheel, wheelSpeed); setVelocity(rightBackWheel, wheelSpeed); } void moveBackward() { setVelocity(leftFrontWheel, -wheelSpeed); setVelocity(leftBackWheel, -wheelSpeed); setVelocity(rightFrontWheel, -wheelSpeed); setVelocity(rightBackWheel, -wheelSpeed); } void moveSidewaysRight() { setVelocity(leftFrontWheel, wheelSpeed); setVelocity(leftBackWheel, -wheelSpeed); setVelocity(rightFrontWheel, -wheelSpeed); setVelocity(rightBackWheel, wheelSpeed); } void moveSidewaysLeft() { setVelocity(leftFrontWheel, -wheelSpeed); setVelocity(leftBackWheel, wheelSpeed); setVelocity(rightFrontWheel, wheelSpeed); setVelocity(rightBackWheel, -wheelSpeed); } void rotateLeft() { setVelocity(leftFrontWheel, -wheelSpeed); setVelocity(leftBackWheel, -wheelSpeed); setVelocity(rightFrontWheel, wheelSpeed); setVelocity(rightBackWheel, wheelSpeed); } void rotateRight() { setVelocity(leftFrontWheel, wheelSpeed); setVelocity(leftBackWheel, wheelSpeed); setVelocity(rightFrontWheel, -wheelSpeed); setVelocity(rightBackWheel, -wheelSpeed); } void moveRightForward() { setVelocity(leftFrontWheel, wheelSpeed); setVelocity(leftBackWheel, 0); setVelocity(rightFrontWheel, 0); setVelocity(rightBackWheel, wheelSpeed); } void moveRightBackward() { setVelocity(leftFrontWheel, 0); setVelocity(leftBackWheel, -wheelSpeed); setVelocity(rightFrontWheel, -wheelSpeed); setVelocity(rightBackWheel, 0); } void moveLeftForward() { setVelocity(leftFrontWheel, 0); setVelocity(leftBackWheel, wheelSpeed); setVelocity(rightFrontWheel, wheelSpeed); setVelocity(rightBackWheel, 0); } void moveLeftBackward() { setVelocity(leftFrontWheel, -wheelSpeed); setVelocity(leftBackWheel, 0); setVelocity(rightFrontWheel, 0); setVelocity(rightBackWheel, -wheelSpeed); } void stopMoving() { motorStop(leftFrontWheel); motorStop(leftBackWheel); motorStop(rightFrontWheel); motorStop(rightBackWheel); } void offMoving() { motorOff(leftFrontWheel); motorOff(leftBackWheel); motorOff(rightFrontWheel); motorOff(rightBackWheel); } void whellsRun() { motorRun(leftFrontWheel); motorRun(leftBackWheel); motorRun(rightFrontWheel); motorRun(rightBackWheel); } void setup() { // Serial.begin(115200); can.reset(); can.setBitrate(CAN_1000KBPS, MCP_8MHZ); can.setNormalMode(); // SPIClass mffVSPI = SPIClass(VSPI); // mffVSPI.begin(VSPI_CLOCK_PIN, VSPI_MISO_PIN, VSPI_MOSI_PIN); //pinMode(VSPI_MOSI_PIN, INPUT_PULLUP); //pinMode(VSPI_MISO_PIN, INPUT_PULLUP); // MCP_CAN mffCAN(VSPI_CS_MCP2515_PIN); //mffCAN.begin(mffVSPI, MCP_ANY, CAN_250KBPS, MCP_8MHZ); // mffCAN.setMode(MCP_NORMAL); Serial.println("Initialized"); whellsRun(); Serial.println("Initialized Successfully!Write to CAN"); } void loop() { Serial.println("Messages loop"); //moveLeftBackward(); setVelocity(rightFrontWheel, -wheelSpeed); setVelocity(rightBackWheel, -wheelSpeed); // stopMoving(); //offMoving(); Serial.println("Messages sent"); if (can.readMessage(&canMsg) == MCP2515::ERROR_OK) { readReply(); } Serial.println(); delay(100); } |
|
| –ê–≤—Ç–æ—Ä: | Dimon456 [ –ß—Ç –¥–µ–∫ 09, 2021 18:49:34 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
anatoliydenisenko44 –ø–∏—Å–∞–ª(–∞): –ø–æ –ø–∏–Ω–∞–º SPI1 —Å—É–¥—è –ø–æ —Ç–æ–º—É —á—Ç–æ –≤ –ø—Ä–∏–º–µ—Ä–µ –≤—ã—à–µ–ö–æ–¥: #include <SPI.h> –≤ –≤–∞—à–µ–º –ø–æ—Å–ª–µ–¥–Ω–µ–º –∫–æ–¥–µ –Ω–µ —É–∫–∞–∑–∞–Ω –∫–∞–∫–æ–π SPI –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è, –Ω–∞–¥–æ —Å–º–æ—Ç—Ä–µ—Ç—å –∫–∞–∫–æ–π SPI –ø–æ —É–º–æ–ª—á–∞–Ω–∏—é –ø—Ä–æ–ø–∏—Å–∞–Ω –≤ —Ñ–∞–ª–µ SPI.h// MOSI MISO SCLK SPIClass SPI3(PC12, PC11, PC10); –Ø –±—ã –µ—â–µ –∏ —ç—Ç–æ—Ç —Ñ–∞–π–ª–∏–∫ mcp2515.h –ø–µ—Ä–µ—Ç—Ä—è—Å, –º–æ–∂–µ—Ç —Ç–∞–º –µ—â–µ —á—Ç–æ —É–∫–∞–∑–∞–Ω–æ. |
|
| –ê–≤—Ç–æ—Ä: | do-vitas [ –°—Ä –¥–µ–∫ 15, 2021 06:29:35 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
anatoliydenisenko44, –∞ –∑–∞—á–µ–º –≤–∞–º mcp2515 —É –≤–∞—Å –∂–µ can –µ—Å—Ç—å –≤ –∫–æ–Ω—Ç—Ä–æ–ª–µ—Ä–µ –≤–∞–º –Ω—É–∂–µ–Ω –ø—Ä–∏–µ–º–æ–ø–µ—Ä–µ–¥–∞—Ç—á–∏–∫ —á—Ç–æ-—Ç–æ —Ç–∏–ø–∞ TJA1040T. –Ø –¥–µ–ª–∞–ª –ª–µ—Ç–æ–º —Ç–∞–∫–æ–π —Ç–æ–∫–∞ f373 –≤—Å–µ —Ä–∞–±–æ—Ç–∞–ª–æ —Ç–æ–∫–∞ –Ω–∞ LL. |
|
| –ê–≤—Ç–æ—Ä: | optima [ –°—Ä –¥–µ–∫ 15, 2021 14:55:40 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: Stm32 (nucleo-h743zi2) SPI, CAN |
–¢–æ–∂–µ –Ω–µ –ø–æ–Ω–∏–º–∞—é –∑–∞—á–µ–º 2515, –ø—Ä–∏ —Ç–æ–º —á—Ç–æ —É –≤–∞—Å –Ω–∞ –±–æ—Ä—Ç—É CAN FD –∞ —ç—Ç–æ —Å—É—â–µ—Å—Ç–≤–µ–Ω–Ω—ã–π –ø–ª—é—Å –ø–æ —Å—Ä–∞–≤–Ω–µ–Ω–∏—é —Å –æ–±—ã—á–Ω—ã–º CAN. –ü–æ—ç—Ç–æ–º—É –∏ —Ç—Ä–∞–Ω—Å–∏–≤–µ—Ä –∂–µ–ª–∞—Ç–µ–ª–µ–Ω –Ω–∞ –º–∏–Ω–∏–º—É–º 5 –º–±—Å |
|
| –°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1 | –ß–∞—Å–æ–≤–æ–π –ø–æ—è—Å: UTC + 3 —á–∞—Å–∞ |
| Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group http://www.phpbb.com/ |
|