|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ?
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 11 ] |
|
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
Igor_Naum

|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ?  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 27, 2016 22:25:46 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
 |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 26, 2013 21:28:58
–°–æ–æ–±—â–µ–Ω–∏–π: 46
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ó–¥—Ä–∞–≤—Å—Ç–≤—É–π—Ç–µ, —É–≤–∞–∂–∞–µ–º—ã–µ —Ñ–æ—Ä—É–º—á–∞–Ω–µ.
–ó–¥—Ä–∞–≤—Å—Ç–≤—É–π—Ç–µ, —É–≤–∞–∂–∞–µ–º—ã–µ —Ñ–æ—Ä—É–º—á–∞–Ω–µ.
–£–∂–µ –Ω–µ–¥–µ–ª—é –∫–æ–≤—ã—Ä—è—é—Å—å –≤ –≥—É–≥–ª–µ –ø–æ –≤–æ–ø—Ä–æ—Å—É –ø—Ä–∏–º–µ–Ω–µ–Ω–∏—è –û–° –¥–ª—è PIC 18.
–í–æ–ø—Ä–æ—Å –Ω–∞–≤–µ—Ä–Ω–æ –¥–∞–∂–µ –Ω–µ –≤ —Ç–æ–º, –∫–∞–∫ –∑–∞—é–∑–∞—Ç—å –∫–∞–∫—É—é –Ω–∏—Ç—å RTOS –¥–ª—è PIC18 (—è —Ç–∞–∫ –ø–æ–Ω–∏–º–∞—é, —á—Ç–æ —ç—Ç–æ –Ω–µ —Ç–µ –ú–ö –∫–æ—Ç–æ—Ä—ã–µ –∑–∞—Ç–æ—á–µ–Ω—ã –ø–æ–¥ —Ä–µ–∞–ª—Ç–∞–π–º–∏–Ω–≥–æ–≤—ã–µ –û–°—ã),
–∞ —Å–∫–æ—Ä–µ–µ –∫–∞–∫–∏–µ –∞—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä—ã –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –¥–ª—è –≥—Ä–æ–º–æ–∑–¥–∫–∏—Ö –ø—Ä–æ–µ–∫—Ç–æ–≤...
–î–æ —Å–∏—Ö –ø–æ—Ä —è –≤—Å–µ –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º—ã –∑–∞–ø—É—Å–∫–∞–ª –ø—Ä–∏ –ø–æ–º–æ—â–∏ —Ñ–ª–∞–≥–æ–≤ (–∫–æ—Ç–æ—Ä—ã–µ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–ª–∏—Å—å –≤ –ø—Ä–æ—Ü–µ–¥—É—Ä–∞—Ö –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π –æ—Ç —Ç–∞–π–º–µ—Ä–æ–≤ –∏ –¥—Ä. –∏—Å—Ç–æ—á–Ω–∏–∫–æ–≤),
–≤ –º–µ–π–Ω–µ —É –º–µ–Ω—è –±—ã–ª —Ü–∏–∫–ª –æ–ø—Ä–æ—Å–∞ —Ñ–ª–∞–≥–æ–≤. –ü—Ä–∏—á–µ–º –ø—Ä–∏—à–µ–ª —è –∫ —ç—Ç–æ–º—É –ø—Ä–æ—Å—Ç–æ —Ç—ã–∫–∞–Ω—å–µ–º, –Ω–æ –∫–∞–∫ –æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è –¥–æ –º–µ–Ω—è –≤—Å–µ –¥–∞–≤–Ω–æ –ø—Ä–∏–¥—É–º–∞–Ω–æ, –∏ –Ω–∞–∑—ã–≤–∞–µ—Ç—Å—è —Ç–∞–∫–∞—è –æ—Ä–≥–∞–Ω–∏–∑–∞—Ü–∏—è
–ø—Ä–æ–µ–∫—Ç–∞ —Ñ–ª–∞–≥–æ–≤—ã–º –∞–≤—Ç–æ–º–∞—Ç–æ–º...
–¢–µ–ø–µ—Ä—å –ª–æ–º–∞—é –≥–æ–ª–æ–≤—É –∏ –Ω–µ –º–æ–≥—É –ø—Ä–∏–¥—É–º–∞—Ç—å –∫–∞–∫ –æ—Ä–≥–∞–Ω–∏–∑–æ–≤–∞—Ç—å –≤—ã–∑–æ–≤ –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º —Å —É—á–µ—Ç–æ–º –∏—Ö –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç–Ω–æ—Å—Ç–∏. –ï—Å—Ç—å –∑–∞–¥–∞—á–∏ –∫–æ—Ç–æ—Ä—ã–µ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –æ–±—Ä–∞–±–æ—Ç–∞—Ç—å –ø–æ—Å–ª–µ –≤—ã—Ö–æ–¥–∞ –∏–∑
–ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –≤ —Ç–µ—á–µ–Ω–∏–∏ 1 –º—Å, –∞ –µ—Å—Ç—å –∫–æ—Ç–æ—Ä—ã–µ –ø–æ–¥–æ–∂–¥—É—Ç –∏ –ø–æ–±–æ–ª–µ–µ - –∑–Ω–∞—á–∏—Ç –Ω—É–∂–Ω–∞ –æ—á–µ—Ä–µ–¥—å –∑–∞–¥–∞—á, –∞ —Ü–∏–∫–ª –ø–æ –∫–æ—Ç–æ—Ä–æ–º—É –≤—Å–µ –∫—Ä—É—Ç–∏—Ç—Å—è - –≤–æ–æ–±—â–µ —Å–∏–ª—å–Ω–æ –º–µ—à–∞–µ—Ç.
–ù–∞–≤–µ—Ä–Ω—è–∫–∞ –µ—Å—Ç—å –≥–æ—Ç–æ–≤—ã–µ —Ä–µ—à–µ–Ω–∏—è –∏ –≤–æ–∑–º–æ–∂–Ω–æ –Ω–µ –æ—á–µ–Ω—å —Å–ª–æ–∂–Ω—ã–µ.
–ö—Ä–∞–π–Ω–∏–π –≤–∞—Ä–∏–∞–Ω—Ç —ç—Ç–æ –∫–æ–Ω–µ—á–Ω–æ RTOS, —Ö–æ—Ç—å —è –µ—â–µ –Ω–µ —Å–æ–≤—Å–µ–º –ø–æ–Ω—è–ª —á—Ç–æ —ç—Ç–æ.
–ï—Å—Ç—å Rtos for Pic24, Pic30 and Pic33 –Ω–∞ —Å–∞–π—Ç–µ –º–∞–π–∫—Ä–æ—á–∏–ø–∞, –Ω–æ –ø–æ–ª–∞–≥–∞—é —á—Ç–æ –Ω–∞ XC8 –æ–Ω–∞ –Ω–µ –∑–∞–ø—É—Å—Ç–∏—Ç—Å—è, –¥–∞ –∏ –Ω—É–∂–Ω–æ –ª–∏?
–ü–æ–¥–µ–ª–∏—Ç–µ—Å—å –∫–æ–º—É –Ω–µ –ª–µ–Ω—å, –∫—Ç–æ –∫–∞–∫ –æ—Ä–≥–∞–Ω–∏–∑—É–µ—Ç —Å—Ç—Ä—É–∫—Ç—É—Ä—É —Å–≤–æ–∏—Ö –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –ø–∏–∫ –¥–æ 18–æ–π –ª–∏–Ω–µ–π–∫–∏ –≤–∫–ª—é—á–∏—Ç–µ–ª—å–Ω–æ...
–°–µ–π—á–∞—Å –ø–∏—à—É –∫–æ–¥ –Ω–∞ XC8 –≤ –ú–ü–ª–∞–±. –ö–æ–Ω–∫—Ä–µ—Ç–Ω—ã–π –∫–∞–º–µ–Ω—å - PIC18F6520
–°–ø–∞—Å–∏–±–æ...
_________________
–ß—Ç–æ–±—ã –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç –≤—Å—è–∫–∏—Ö –∫–æ—Ç–æ–≤, –ª—É—á—à–µ –≤—Å–µ–≥–æ –æ–±–∑–∞–≤–µ—Å—Ç–∏—Å—å —Å–≤–æ–∏–º —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã–º...
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Zhuk72
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 27, 2016 22:40:51 |
|
| –°–≤–µ—Ä–ª–∏—Ç —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç –∫–æ–≥—Ç—è–º–∏ |
 |
–ö–∞—Ä–º–∞: 25
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 168
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 29, 2014 08:41:31
–°–æ–æ–±—â–µ–Ω–∏–π: 1231
–û—Ç–∫—É–¥–∞: –ë–∞–∫—É
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–•–æ—Ä–æ—à–∏–π —Ä–µ—Å—É—Ä—Å.–¢–∞–º –∂–µ –µ—Å—Ç—å –ø—Ä–∏–º–µ—Ä—ã –¥–ª—è PIC18.
_________________
–ö–∞–∂–¥—ã–π –∏–º–µ–µ—Ç –ø—Ä–∞–≤–æ –Ω–∞ —Å–≤–æ–µ –ª–∏—á–Ω–æ–µ –æ—à–∏–±–æ—á–Ω–æ–µ –º–Ω–µ–Ω–∏–µ.
–£ –º–µ–Ω—è –±—ã–ª–æ —Ç—è–∂–µ–ª–æ–µ –¥–µ—Ç—Å—Ç–≤–æ - —è –¥–æ 14 –ª–µ—Ç —Å–º–æ—Ç—Ä–µ–ª —á–µ—Ä–Ω–æ-–±–µ–ª—ã–π —Ç–µ–ª–µ–≤–∏–∑–æ—Ä.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
–êlex
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 27, 2016 23:50:15 |
|
| –ú–æ–¥–µ—Ä–∞—Ç–æ—Ä |
 |
–ö–∞—Ä–º–∞: 90
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1337
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 18, 2010 23:09:57
–°–æ–æ–±—â–µ–Ω–∏–π: 4558
–û—Ç–∫—É–¥–∞: –ü–ª–∞–Ω–µ—Ç–∞ –ó–µ–º–ª—è
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
")
|
–¶–∏—Ç–∞—Ç–∞: –ï—Å—Ç—å –∑–∞–¥–∞—á–∏ –∫–æ—Ç–æ—Ä—ã–µ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –æ–±—Ä–∞–±–æ—Ç–∞—Ç—å –ø–æ—Å–ª–µ –≤—ã—Ö–æ–¥–∞ –∏–∑ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –≤ —Ç–µ—á–µ–Ω–∏–∏ 1 –º—Å –ï—Å–ª–∏ –ª—é–±–∞—è –¥—Ä—É–≥–∞—è –∑–∞–¥–∞—á–∞ –≤ –∫–∞–∫–æ–º-—Ç–æ –º–µ—Å—Ç–µ –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è –±–æ–ª–µ–µ 1 –º—Å (—Ç.–µ. –æ—Ç–¥–∞—Å—Ç —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –ø–ª–∞–Ω–∏—Ä–æ–≤—â–∏–∫—É –Ω–µ —Ä–∞–Ω—å—à–µ, —á–µ–º —á–µ—Ä–µ–∑ 1 –º—Å), —Ç–æ –±–µ–∑ –≤—ã—Ç–µ—Å–Ω—è—é—â–µ–≥–æ –ø–ª–∞–Ω–∏—Ä–æ–≤—â–∏–∫–∞ –Ω–µ –æ–±–æ–π—Ç–∏—Å—å. –ê —Ç–∞–∫, –∫–∞–∫ —É–∂–µ –ø—Ä–µ–¥–ª–æ–∂–∏–ª–∏ –≤—ã—à–µ, "OSA" - –Ω–µ–ø–ª–æ—Ö–æ–π –≤–∞—Ä–∏–∞–Ω—Ç. –°–∞–º –ª–∏—á–Ω–æ –µ–π –ø–æ–ª—å–∑—É—é—Å—å —É–∂–µ –¥–∞–≤–Ω–æ, –Ω–∞—Ä–µ–∫–∞–Ω–∏–π –Ω–∏–∫–∞–∫–∏—Ö –Ω–µ—Ç. –ù–æ –æ–Ω–∞ –∫–æ–æ–ø–µ—Ä–∞—Ç–∏–≤–Ω–∞—è. –í—Å–µ –≤—Ä–µ–º–µ–Ω–∞ –ø–ª–∞–Ω–∏—Ä—É—é—Ç—Å—è –ø—Ä–æ–≥—Ä–∞–º–º–∏—Å—Ç–æ–º –Ω–∞ —ç—Ç–∞–ø–µ –Ω–∞–ø–∏—Å–∞–Ω–∏—è –ø—Ä–æ–≥—Ä–∞–º–º—ã. –¢.–µ. –Ω—É–∂–Ω–æ —á—ë—Ç–∫–æ –ø–æ–Ω–∏–º–∞—Ç—å, —á—Ç–æ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –≤ –ø—Ä–æ–≥—Ä–∞–º–º–µ, –∫–æ–≥–¥–∞ –æ—Ç–¥–∞—ë—Ç—Å—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –ø–ª–∞–Ω–∏—Ä–æ–≤—â–∏–∫—É, –≥–¥–µ –∏ –Ω–∞ –∫–∞–∫–æ–µ –≤—Ä–µ–º—è –º–æ–∂–µ—Ç –∑–∞–¥–µ—Ä–∂–∞—Ç—å—Å—è –ø–µ—Ä–µ–¥–∞—á–∞, ... –î–æ–±–∞–≤–ª–µ–Ω–æ after 10 minutes 11 seconds:–¢—é... –ü—Ä–æ–º–æ—Ä–≥–∞–ª –≤ –í–∞—à–µ–º —Å–æ–æ–±—â–µ–Ω–∏–∏ —Å–ª–æ–≤–æ "XC8". OSA, –∫ —Å–æ–∂–∞–ª–µ–Ω–∏—é, –Ω–µ –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ—Ç —ç—Ç–æ—Ç –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä. –î–ª—è 18-—ã—Ö –ü–ò–ö–æ–≤ - "MPLAB C18".
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–æ–¥—ç—Ä–∏–∫
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –æ–∫—Ç 28, 2016 17:05:48 |
|
| –ù–∞—à–µ–ª —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä. –ü–æ–Ω—é—Ö–∞–ª. |
 |
–ö–∞—Ä–º–∞: 3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 21
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –Ω–æ—è 26, 2015 23:22:35
–°–æ–æ–±—â–µ–Ω–∏–π: 157
–û—Ç–∫—É–¥–∞: –Ω–µ —Å –£—Ñ—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Igor_Naum –ø–∏—Å–∞–ª(–∞): ...
–ï—Å—Ç—å –∑–∞–¥–∞—á–∏ –∫–æ—Ç–æ—Ä—ã–µ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –æ–±—Ä–∞–±–æ—Ç–∞—Ç—å –ø–æ—Å–ª–µ –≤—ã—Ö–æ–¥–∞ –∏–∑
–ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –≤ —Ç–µ—á–µ–Ω–∏–∏ 1 –º—Å, –∞ –µ—Å—Ç—å –∫–æ—Ç–æ—Ä—ã–µ –ø–æ–¥–æ–∂–¥—É—Ç –∏ –ø–æ–±–æ–ª–µ–µ - –∑–Ω–∞—á–∏—Ç –Ω—É–∂–Ω–∞ –æ—á–µ—Ä–µ–¥—å –∑–∞–¥–∞—á, –∞ —Ü–∏–∫–ª –ø–æ –∫–æ—Ç–æ—Ä–æ–º—É –≤—Å–µ –∫—Ä—É—Ç–∏—Ç—Å—è - –≤–æ–æ–±—â–µ —Å–∏–ª—å–Ω–æ –º–µ—à–∞–µ—Ç.
... –µ—Å–ª–∏ —É—Å–ª–æ–≤–∏–µ –¥–ª—è –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏ –±—ã—Å—Ç—Ä–æ —Ä–µ—à–∏—Ç—å —ç—Ç—É –∑–∞–¥–∞—á—É –ø–æ—è–≤–ª—è–µ—Ç—Å—è –≤ —Å–∞–º–æ–º –æ–±—Ä–∞–±–æ—Ç—á–∏–∫–µ, —Ç–æ —Ä–∞–∑–≤–µ –Ω–µ–ª—å–∑—è –µ—ë –∏–º–µ–Ω–Ω–æ —Ç–∞–º –∏ –≤—ã–ø–æ–ª–Ω–∏—Ç—å? –í–µ–¥—å –ø–æ —Å—É—Ç–∏ —Ç–æ –∏–ª–∏ –∏–Ω–æ–µ –º–µ—Å—Ç–æ–ø–æ–ª–æ–∂–µ–Ω–∏–µ –∫—É—Å–∫–∞ –∫–æ–¥–∞ –ø–æ–¥ –≤—ã–ø–æ–ª–Ω–µ–Ω–∏–µ —ç—Ç–æ–π –∑–∞–¥–∞—á–∏ –Ω–∏–∫–∞–∫–æ–≥–æ –∑–Ω–∞—á–µ–Ω–∏—è –Ω–µ –∏–º–µ–µ—Ç, –≥–ª–∞–≤–Ω–æ–µ –∫–∞–∫ —è –ø–æ–Ω—è–ª, –µ–≥–æ –Ω–µ–∑–∞–º–µ–¥–ª–∏—Ç–µ–ª—å–Ω–æ –≤—ã–ø–æ–ª–Ω–∏—Ç—å. –¢–æ –µ—Å—Ç—å, –∫–∞–∫ —Å—Ñ–æ—Ä–º–∏—Ä–æ–≤–∞–ª–∏—Å—å —É—Å–ª–æ–≤–∏—è, —Ç–∞–∫ –∏ –≤—ã–ø–æ–ª–Ω—è–π, –≤ —ç—Ç–æ–º —Å–ª—É—á–∞–µ –¥–∞–∂–µ —Ñ–ª–∞–≥ –Ω–µ –Ω—É–∂–µ–Ω. –õ–∏–±–æ –º–æ–∂–Ω–æ –ø—Ä–æ—Å—Ç–æ –º–∞–Ω–∏–ø—É–ª–∏—Ä–æ–≤–∞—Ç—å —Å—Ç–µ–∫–æ–º, —Ç–æ –µ—Å—Ç—å –ø–æ–¥–º–µ–Ω–∏—Ç—å –∞–¥—Ä–µ—Å –≤–æ–∑–≤—Ä–∞—Ç–∞, –Ω–æ —ç—Ç–æ –Ω–µ –ª—É—á—à–µ –∏ –Ω–µ —Ö—É–∂–µ, –∞ –≤ –ø—Ä–∏–Ω—Ü–∏–ø–µ —Ç–æ–∂–µ —Å–∞–º–æ–µ. –Ø –¥—É–º–∞—é, –º–æ–∂–Ω–æ –∏ —É—Å–ª–æ–∂–Ω–∏—Ç—å —Å–∞–º—É —Å—Ç—Ä—É–∫—Ç—É—Ä—É –æ—Å–Ω–æ–≤–Ω–æ–≥–æ —Ü–∏–∫–ª–∞, —Ä–∞–∑–±–∏—Ç—å –µ–≥–æ –Ω–∞ –ø–æ–¥—Ü–∏–∫–ª—ã, –∏ —Ä–∞–∑–¥–µ–ª–∏—Ç—å —á–∞—Å—Ç–æ—Ç—É –æ–±—Ä–∞—â–µ–Ω–∏–π –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç–∞–º–∏, —Ç–æ –µ—Å—Ç—å —Ç–æ, —á—Ç–æ –≤–∞–∂–Ω–µ–µ, –∫—Ä—É—Ç–∏—à—å —á–∞—â–µ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
Открыт интернет-магазин MEAN WELL.Market – весь ассортимент MEAN WELL, выгодные цены
–û—Ç–∫—Ä—ã—Ç–∞ —É–¥–æ–±–Ω–∞—è –ø–ª–æ—â–∞–¥–∫–∞ —Å –≤—ã–≥–æ–¥–Ω—ã–º–∏ —Ü–µ–Ω–∞–º–∏, –ø–æ—Å—Ç–∞–≤–ª—è—é—â–∞—è –≤–µ—Å—å –∞—Å—Å–æ—Ä—Ç–∏–º–µ–Ω—Ç –ø—Ä–æ–¥—É–∫—Ü–∏–∏, –ø—Ä–æ–∏–∑–≤–æ–¥–∏–º–æ–π –∫–æ–º–ø–∞–Ω–∏–µ–π MEAN WELL ‚Äì –æ—Ç –∑–∞–≤–æ–µ–≤–∞–≤—à–∏—Ö –ø–æ–ø—É–ª—è—Ä–Ω–æ—Å—Ç—å –∏ –∏–∑–≤–µ—Å—Ç–Ω—ã—Ö –Ω–∞ —Ä—ã–Ω–∫–µ –∏–∑–¥–µ–ª–∏–π –¥–æ –Ω–æ–≤–∏–Ω–æ–∫. MEAN WELL.Market –ø—Ä–µ–¥–æ—Å—Ç–∞–≤–ª—è–µ—Ç –≥–∞—Ä–∞–Ω—Ç–∏–π–Ω—É—é –∏ —Å–µ—Ä–≤–∏—Å–Ω—É—é –ø–æ–¥–¥–µ—Ä–∂–∫—É, —É–¥–æ–±–Ω—ã–π –ø–æ–¥–±–æ—Ä –ø—Ä–æ–¥—É–∫—Ü–∏–∏, –æ–ø–µ—Ä–∞—Ç–∏–≤–Ω—É—é –¥–æ—Å—Ç–∞–≤–∫—É –ø–æ –Ý–æ—Å—Å–∏–∏.
–ù–∞ —Å–∞–π—Ç–µ –∏–Ω—Ç–µ—Ä–Ω–µ—Ç-–º–∞–≥–∞–∑–∏–Ω–∞ –ø–æ—Å–µ—Ç–∏—Ç–µ–ª–∏ —Å–º–æ–≥—É—Ç –Ω–∞–π—Ç–∏ –æ–±–∑–æ—Ä—ã, –∏–Ω—Ç–µ—Ä–µ—Å–Ω—ã–µ —Å—Ç–∞—Ç—å–∏ –æ –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–∏, –º–∞–∫—Å–∏–º–∞–ª—å–Ω—ã–π –æ–±—ä–µ–º —Ç–µ—Ö–Ω–∏—á–µ—Å–∫–∏—Ö —Å–≤–µ–¥–µ–Ω–∏–π.
–ü–æ–¥—Ä–æ–±–Ω–µ–µ>>
|
|
|
|
|
|
|
Igor_Naum
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –æ–∫—Ç 28, 2016 21:20:57 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 26, 2013 21:28:58
–°–æ–æ–±—â–µ–Ω–∏–π: 46
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ü–æ –ø–æ–≤–æ–¥—É –ø—Ä–æ—Ü–µ–¥—É—Ä –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ - —ç—Ç–æ –∫–∞–∫-–±—ã –≤—Å–µ–æ–±—â–∞—è –ø—Ä–∞–∫—Ç–∏–∫–∞, –∫–æ—Ç–æ—Ä–æ–π —è —Å—Ç–∞—Ä–∞—é—Å—å —Å–ª–µ–¥–æ–≤–∞—Ç—å.
–í –ø—Ä–∏–Ω—Ü–∏–ø–µ –≤ –ø—Ä–∏–º–∏—Ç–∏–≤–Ω—ã—Ö –ø—Ä–æ–µ–∫—Ç–∞—Ö, –≥–¥–µ –æ–¥–∏–Ω –∏—Å—Ç–æ—á–Ω–∏–∫ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è, –∞ –≤—Å–µ –æ—Å—Ç–∞–ª—å–Ω—ã–µ —Å–æ–±—ã—Ç–∏—è –ø—Ä–æ–∏—Å—Ö–æ–¥—è—Ç —Å–ª–µ–¥–æ–º –¥—Ä—É–≥ –∑–∞ –¥—Ä—É–≥–æ–º —è —Ç–∞–∫ –∏ –¥–µ–ª–∞–ª.
–°–µ–π—á–∞—Å –ø–æ–ª—É—á–∞–µ—Ç—Å—è, —á—Ç–æ –æ—Å–Ω–æ–≤–Ω–æ–π —Ü–∏–∫–ª —Å–ª–∏—à–∫–æ–º –≥—Ä–æ–º–æ–∑–¥–æ–∫, –¥–∞–∂–µ –µ—Å–ª–∏ —Å–¥–µ–ª–∞—Ç—å –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ —á—Ç–æ —Ç–æ –±—ã—Å—Ç—Ä–æ–µ, –≤—Å–µ-—Ä–∞–≤–Ω–æ –ø–æ—Ç–æ–º —ç—Ç–æ –Ω—É–∂–Ω–æ –æ–±—Ä–∞–±–æ—Ç–∞—Ç—å –≤ –æ—Å–Ω–æ–≤–Ω–æ–º –∫–æ–¥–µ.
–ê –µ—Å–ª–∏ —Å–ª—É—á–∏–ª–æ—Å—å –º–Ω–æ–≥–æ —Å–æ–±—ã—Ç–∏–π? –¶–∏–∫–ª –ø—Ä–æ—Å—Ç–æ –º–æ–∂–µ—Ç –Ω–µ –∑–∞–≤–µ—Ä—à–∏—Ç—Å—è –¥–æ –∫–æ–Ω—Ü–∞, –∏ —Ç–æ–≥–¥–∞, –ø—Ä–∏ –Ω–æ–≤–æ–º –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ –º—ã —Ä–∏—Å–∫—É–µ–º –ø–æ—Ç–µ—Ä—è—Ç—å —Å—Ç–∞—Ä—ã–µ –¥–∞–Ω–Ω—ã–µ, –∞ –ø—Ä–∏ –≤–æ–∑–≤—Ä–∞—Ç–µ –ø–æ–ø–∞–¥–µ–º –≤ —Å–µ—Ä–µ–¥–∏–Ω—É —Ü–∏–∫–ª–∞ –∏
–Ω–µ –æ–±—Ä–∞–±–æ—Ç–∞–µ–º –Ω–æ–≤—ã–µ –¥–∞–Ω–Ω—ã–µ, –∞ –±—É–¥–µ–º –∑–∞–Ω–∏–º–∞—Ç—å—Å—è –±–µ—Å–ø–æ–ª–µ–∑–Ω—ã–º –≤—ã–≤–æ–¥–æ–º –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–∏ –Ω–∞ –ñ–ö –Ω–∞–ø—Ä–∏–º–µ—Ä .
–î–∞ –±–µ–≥–ª–æ –ø–æ—á–∏—Ç–∞–ª –≤–≤–µ–¥–µ–Ω–∏–µ –≤ OSA, –ø—Ä–∏—è—Ç–Ω–æ —á—Ç–æ –Ω–∞ —Ä—É—Å—Å–∫–æ–º –∏ –º–Ω–æ–≥–æ –∏–Ω—Ñ—ã.
–ü–æ–¥—É–º—ã–≤–∞—é –Ω–∞–¥ –°18...
_________________
–ß—Ç–æ–±—ã –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç –≤—Å—è–∫–∏—Ö –∫–æ—Ç–æ–≤, –ª—É—á—à–µ –≤—Å–µ–≥–æ –æ–±–∑–∞–≤–µ—Å—Ç–∏—Å—å —Å–≤–æ–∏–º —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã–º...
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
LED-–¥—Ä–∞–π–≤–µ—Ä—ã MOSO - –Ω–∞–¥–µ–∂–Ω—ã–µ —Ä–µ—à–µ–Ω–∏—è –¥–ª—è –∏–Ω–¥—É—Å—Ç—Ä–∏–∞–ª—å–Ω—ã—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π
–ü—Ä–æ–¥—É–∫—Ü–∏—è MOSO –ø—Ä–µ–¥–Ω–∞–∑–Ω–∞—á–µ–Ω–∞ –≤ –æ—Å–Ω–æ–≤–Ω–æ–º –¥–ª—è –∏–Ω–¥—É—Å—Ç—Ä–∏–∞–ª—å–Ω—ã—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π, –∏—Å–ø–æ–ª—å–∑—É–µ—Ç –∏–Ω–Ω–æ–≤–∞—Ü–∏–æ–Ω–Ω—ã–µ —Ä–µ—à–µ–Ω–∏—è –Ω–∞ –æ—Å–Ω–æ–≤–µ –±–æ–ª–µ–µ 200 —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã—Ö –ø–∞—Ç–µ–Ω—Ç–æ–≤ –¥–ª—è —Å–∏–ª–æ–≤–æ–π —ç–ª–µ–∫—Ç—Ä–æ–Ω–∏–∫–∏ –∏ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç –º–µ–∂–¥—É–Ω–∞—Ä–æ–¥–Ω—ã–º —Å—Ç–∞–Ω–¥–∞—Ä—Ç–∞–º. LED-–¥—Ä–∞–π–≤–µ—Ä—ã MOSO –ø—Ä–∏–º–µ–Ω—è—é—Ç—Å—è –≤ —Å–∏—Å—Ç–µ–º–∞—Ö –Ω–∞—Ä—É–∂–Ω–æ–≥–æ –æ—Å–≤–µ—â–µ–Ω–∏—è —Ä–∞–∑–Ω—ã—Ö –æ—Ç—Ä–∞—Å–ª–µ–π, –≤–∫–ª—é—á–∞—è –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω–æ—Å—Ç—å, —Å–µ–ª—å—Å–∫–æ–µ —Ö–æ–∑—è–π—Å—Ç–≤–æ, —Ç—Ä–∞–Ω—Å–ø–æ—Ä—Ç –∏ –∂–µ–ª–µ–∑–Ω—É—é –¥–æ—Ä–æ–≥—É. –í —Ä—è–¥–µ —Å–µ—Ä–∏–π —Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω–∞ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –¥–∏—Å—Ç–∞–Ω—Ü–∏–æ–Ω–Ω–æ–≥–æ –∫–æ–Ω—Ç—Ä–æ–ª—è –∏ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è —Ä–∞–±–æ—Ç—ã –ø–æ –∑–∞–¥–∞–Ω–Ω–æ–º—É —Å—Ü–µ–Ω–∞—Ä–∏—é. –Ý–∞–∑–±–µ—Ä–µ–º —Ä–µ—à–µ–Ω–∏—è MOSO
–ø–æ–¥—Ä–æ–±–Ω–µ–µ>>
|
|
|
|
|
|
|
Igor_Naum
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –æ–∫—Ç 31, 2016 23:23:18 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 26, 2013 21:28:58
–°–æ–æ–±—â–µ–Ω–∏–π: 46
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ê –Ω–∏–∫—Ç–æ –Ω–µ —Å—Ç–∞–ª–∫–∏–≤–∞–ª—Å—è —Å MPLAB Harmony?
–¢–∞–º –µ—Å—Ç—å –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –ø–æ–¥–∫–ª—é—á–µ–Ω–∏—è —Ä–∞–∑–Ω—ã—Ö RTOS (freeRTOS openRTOS –Ω–∞–ø—Ä–∏–º–µ—Ä).
–ù–∞—Å–∫–æ–ª—å–∫–æ –ø–æ–Ω–∏–º–∞—é –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ—Ç –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä—ã XC.
–î–æ–±–∞–≤–ª–µ–Ω–æ after 44 minutes 5 seconds:
–ê –≤—Å–µ, –æ–Ω –¥–ª—è PIC32...
_________________
–ß—Ç–æ–±—ã –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç –≤—Å—è–∫–∏—Ö –∫–æ—Ç–æ–≤, –ª—É—á—à–µ –≤—Å–µ–≥–æ –æ–±–∑–∞–≤–µ—Å—Ç–∏—Å—å —Å–≤–æ–∏–º —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã–º...
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Igor_Naum
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 02, 2016 23:07:27 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 26, 2013 21:28:58
–°–æ–æ–±—â–µ–Ω–∏–π: 46
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–û—Å—Ç–∞–Ω–æ–≤–∏–ª—Å—è –Ω–∞ OSA –ø–æ —Å—Å—ã–ª–∫–µ –≤—ã—à–µ...
–ü—ã—Ç–∞—é—Å—å –∑–∞–ø—É—Å—Ç–∏—Ç—å —Ç–µ—Å—Ç–æ–≤—ã–π –ø—Ä–æ–µ–∫—Ç –∏–∑ –ø–µ—Ä–≤–æ–≥–æ –ø—Ä–∏–º–µ—Ä–∞.
–ö–æ–º–ø–∏–ª—è—Ç–æ—Ä –°18 (3.47) + MPLab X IDE 3.4
–ò –Ω–∏–∫–∞–∫ –Ω–µ –º–æ–≥—É –ø–æ–¥–∫–ª—é—á–∏—Ç—å –∏–Ω–∫–ª—É–¥—ã –Ω–æ—Ä–º–∞–ª—å–Ω–æ.
–°–Ω–∞—á–∞–ª–∞ –ø—Ä–æ–µ–∫—Ç –Ω–µ –≤–∏–¥–µ–ª osa.h –≤ –ø–∞–ø–∫–µ —Å osa - –ø–æ—Å–ª–µ —Ç–∞–Ω—Ü–µ–≤ —Å –±—É–±–Ω–æ–º –≤—Ä–æ–¥–µ –ø–æ–¥–∫–ª—é—á–∏–ª.
–ù–æ —Ç–µ–ø–µ—Ä—å –Ω–µ –ø–æ–¥–∫–ª—é—á–∞–µ—Ç—Å—è OSAcfg.h - —Å—Ç—Ä–æ—á–∫–∞ #include osa.h –≤—ã–¥–µ–ª–µ–Ω–∞ –∂–µ–ª—Ç—ã–º –≤ —Ä–∞—Å—à–∏—Ñ—Ä–æ–≤–∫–µ (–Ω–µ –º–æ–∂–µ—Ç –Ω–∞–π—Ç–∏ OSAcfg.h —Ö–æ—Ç—è –æ–Ω–∞ –≤ –ø–∞–ø–∫–µ –ø—Ä–æ–µ–∫—Ç–∞).
–í–æ–æ–±—â–µ –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –ø—Ä–æ–µ–∫—Ç–∞ –µ—Å—Ç—å sourse folders –ü–Ý–û–ï–ö–¢–ê –∏ include directories –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä–∞. –ò —Ç–∞–º, –∏ —Ç–∞–º —É–∫–∞–∑—ã–≤–∞—é—Ç—Å—è –ø–æ–¥–∫–ª—é—á–∞–µ–º—ã–µ –¥–∏—Ä–µ–∫—Ç–æ—Ä–∏–∏, –Ω–æ
–∫–∞–∫–∏–µ –∫—É–¥–∞ –¥–∏—Ä–µ–∫—Ç–æ—Ä–∏–∏ –ø–æ–¥–∫–ª—é—á–∞—Ç—å —Ç–∞–∫ –∏ –Ω–µ –ø–æ–Ω—è–ª...
_________________
–ß—Ç–æ–±—ã –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç –≤—Å—è–∫–∏—Ö –∫–æ—Ç–æ–≤, –ª—É—á—à–µ –≤—Å–µ–≥–æ –æ–±–∑–∞–≤–µ—Å—Ç–∏—Å—å —Å–≤–æ–∏–º —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã–º...
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–êlex
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 02, 2016 23:42:28 |
|
| –ú–æ–¥–µ—Ä–∞—Ç–æ—Ä |
|
–ö–∞—Ä–º–∞: 90
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1337
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 18, 2010 23:09:57
–°–æ–æ–±—â–µ–Ω–∏–π: 4558
–û—Ç–∫—É–¥–∞: –ü–ª–∞–Ω–µ—Ç–∞ –ó–µ–º–ª—è
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
|
1. –í –ø–∞–ø–∫—É —Å –ø—Ä–æ–µ–∫—Ç–æ–º –∫–∏–¥–∞–µ–º –ø–∞–ø–∫—É "osa". 2. –í –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä–∞, –≤ –ø–æ–¥–∫–ª—é—á–∞–µ–º—ã—Ö –ø—É—Ç—è—Ö, –¥–æ–±–∞–≤–ª—è–µ–º —Ç–µ–∫—É—â—É—é –ø–∞–ø–∫—É (".") –∏ –ø–∞–ø–∫—É —Å –û–°–æ–π ("osa"). 3. –§–∞–π–ª OSAcfg.h –∫–ª–∞–¥—ë–º –≤ –ø–∞–ø–∫—É —Å –ø—Ä–æ–µ–∫—Ç–æ–º. –≠—Ç–æ —Å—Ç–∞–Ω–¥–∞—Ä—Ç–Ω—ã–µ —à–∞–≥–∏ –¥–ª—è –∑–∞–ø—É—Å–∫–∞ OSA –≤ MPLAB 8.xx . –î–ª—è MPLAB X, –¥—É–º–∞—é, –≤—Å—ë –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å –∏–¥–µ–Ω—Ç–∏—á–Ω—ã–º... –î–æ–±–∞–≤–ª–µ–Ω–æ after 15 minutes 46 seconds:–ü–æ–ø—Ä–æ–±–æ–≤–∞–ª –≤ –•-–µ. –í—Å—ë –±–µ–∑ –ø—Ä–æ–±–ª–µ–º. –¢—É—Ç –¥–æ–ª–∂–Ω—ã –±—ã—Ç—å –ø—Ä–æ–ø–∏—Å–∞–Ω—ã –ø—É—Ç–∏ : –°–ø–æ–π–ª–µ—Ä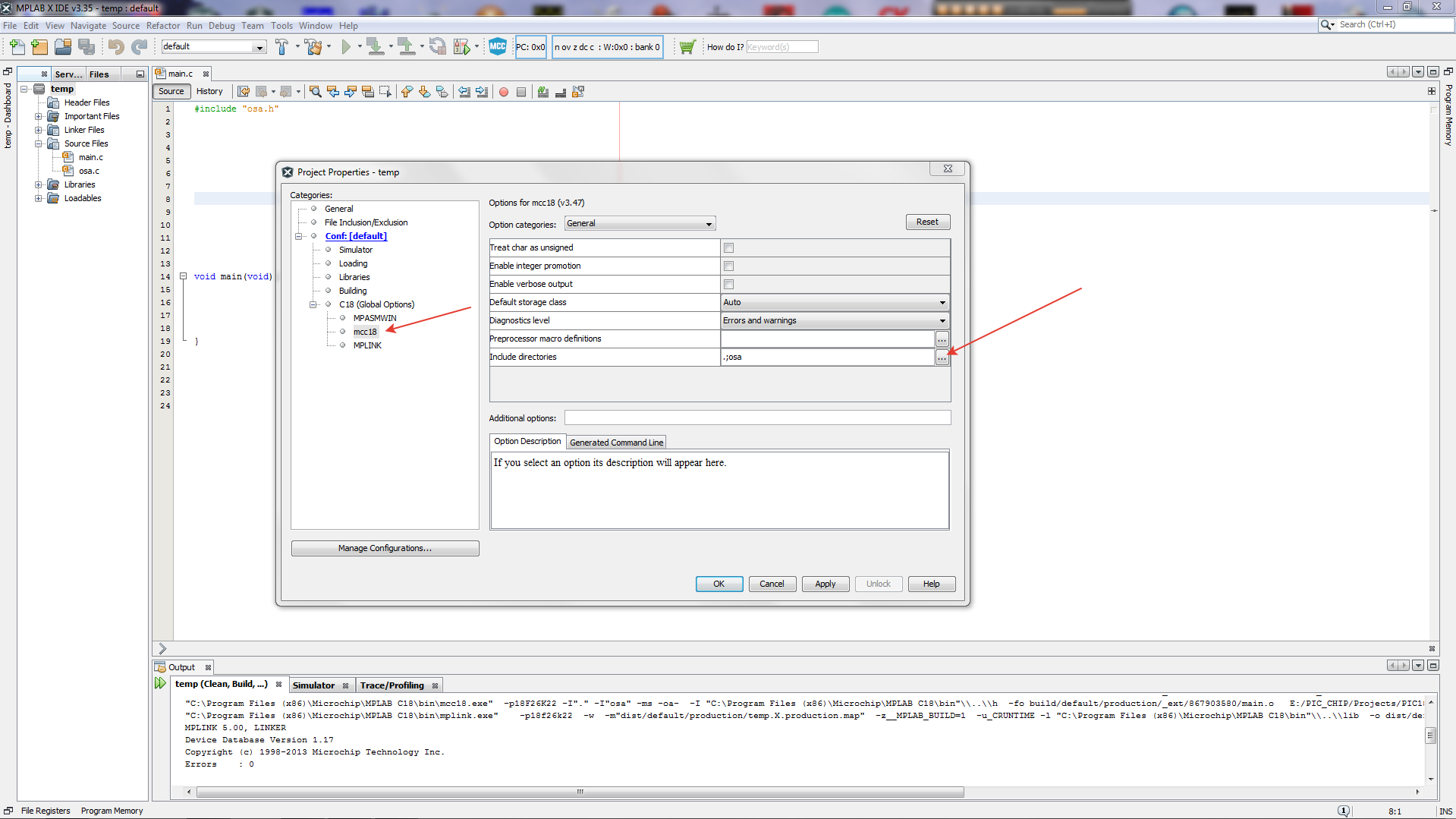 –í–ª–æ–∂–µ–Ω–∏–µ:
 2016-11-03_23-39-07.png [170.48 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 293
2016-11-03_23-39-07.png [170.48 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 293
–ü—Ä–æ–µ–∫—Ç : –í–ª–æ–∂–µ–Ω–∏–µ:
temp.X.rar [1.43 MiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 233
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Igor_Naum
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –Ω–æ—è 03, 2016 22:53:08 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 26, 2013 21:28:58
–°–æ–æ–±—â–µ–Ω–∏–π: 46
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–°–ø–∞—Å–∏–±–æ –∑–∞ –µ–º–∫–∏–π –æ—Ç–≤–µ—Ç, Alex! –í—Å–µ —Å—Ç–∞–ª–æ –Ω–∞ —Å–≤–æ–∏ –º–µ—Å—Ç–∞... –ó–∞–ø—É—Å—Ç–∏–ª –ø—Ä–æ–µ–∫—Ç –∏–∑ —É—á–µ–±–Ω–∏–∫–∞ —Å –∑–∞–¥–µ—Ä–∂–∫–∞–º–∏ —Å –Ω–µ–±–æ–ª—å—à–∏–º–∏ –ø–æ–ø—Ä–∞–≤–∫–∞–º–∏... –í —á–∞—Å—Ç–Ω–æ—Å—Ç–∏, –ø–æ—á–µ–º—É —Ç–æ –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä—É –Ω–µ –Ω—Ä–∞–≤–∏—Ç—Å—è —Å—Ç—Ä–æ—á–∫–∞ –æ–±—Ä–∞–±–æ—Ç—á–∏–∫–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è void interrupt isr (void) {} –ó–∞–º–µ–Ω–∏–ª –Ω–∞ #pragma interrupt isr void isr (void) {} –º–æ—Ä–≥–∞–µ—Ç  –ù–∞ –≤—ã—Ö–æ–¥–Ω—ã—Ö –ø–æ–±–æ–ª–µ–µ –≤—Ä–µ–º–µ–Ω–∏ –±—É–¥–µ—Ç, –±—É–¥—É —Ä–∞–∑–±–∏—Ä–∞—Ç—å—Å—è –¥–∞–ª—å—à–µ...
_________________
–ß—Ç–æ–±—ã –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç –≤—Å—è–∫–∏—Ö –∫–æ—Ç–æ–≤, –ª—É—á—à–µ –≤—Å–µ–≥–æ –æ–±–∑–∞–≤–µ—Å—Ç–∏—Å—å —Å–≤–æ–∏–º —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã–º...
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
–êlex
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –Ω–æ—è 03, 2016 23:06:46 |
|
| –ú–æ–¥–µ—Ä–∞—Ç–æ—Ä |
|
–ö–∞—Ä–º–∞: 90
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1337
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 18, 2010 23:09:57
–°–æ–æ–±—â–µ–Ω–∏–π: 4558
–û—Ç–∫—É–¥–∞: –ü–ª–∞–Ω–µ—Ç–∞ –ó–µ–º–ª—è
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
|
Igor_Naum –ø–∏—Å–∞–ª(–∞): –ø–æ—á–µ–º—É —Ç–æ –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä—É –Ω–µ –Ω—Ä–∞–≤–∏—Ç—Å—è —Å—Ç—Ä–æ—á–∫–∞ –æ–±—Ä–∞–±–æ—Ç—á–∏–∫–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è void interrupt isr (void) {} –≠—Ç–æ —Å–∏–Ω—Ç–∞–∫—Å–∏—Å —Ö–∞–π—Ç–µ–∫–∞. –í –°18 –æ–±—Ä–∞–±–æ—Ç—á–∏–∫–∏ –Ω–µ–º–Ω–æ–≥–æ –ø–æ –¥—Ä—É–≥–æ–º—É —Ä–µ–∞–ª–∏–∑—É—é—Ç—Å—è. –î–æ–±–∞–≤–ª–µ–Ω–æ after 10 minutes 5 seconds:–ï—â—ë –Ω–µ –∑–∞–±—ã–≤–∞–π—Ç–µ, —á—Ç–æ –≤ 18-—ã—Ö PIC'–∞—Ö 2 –≤–µ–∫—Ç–æ—Ä–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π - –≤—ã—Å–æ–∫–æ–≥–æ –∏ –Ω–∏–∑–∫–æ–≥–æ –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç–∞. –í–æ—Ç, —á—Ç–æ –≥–ª–∞—Å–∏—Ç –º–∞–Ω—É–∞–ª –ø–æ –ø–æ–≤–æ–¥—É –∏—Ö –ø—Ä–∞–≥–º : 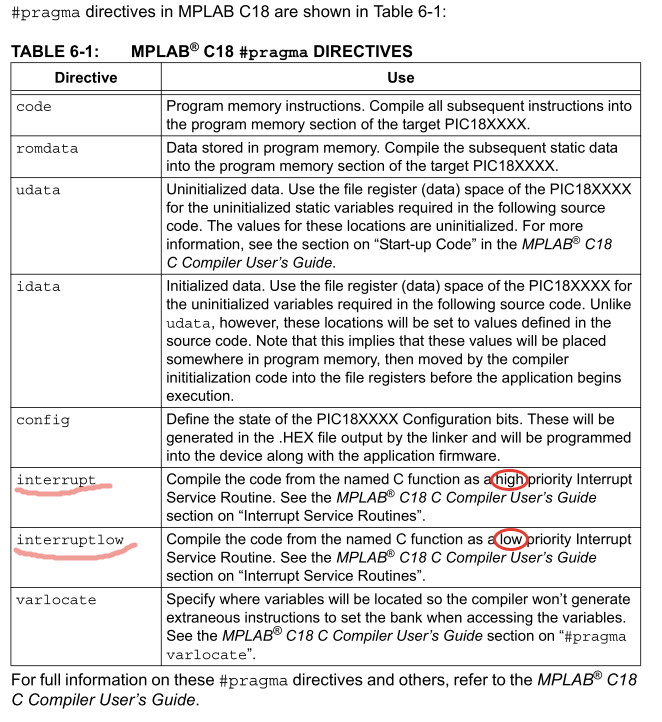 –í–ª–æ–∂–µ–Ω–∏–µ:
2016-11-04_00-12-40.png [168.27 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 1172
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Igor_Naum
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞ –ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è –º–ª–∞–¥—à–∏—Ö PIC . RTOS –¥–ª—è pic18 ? –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –Ω–æ—è 06, 2016 12:27:15 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 26, 2013 21:28:58
–°–æ–æ–±—â–µ–Ω–∏–π: 46
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ü–æ—Ç–∏—Ö–æ–Ω—å–∫—É –≤–Ω–∏–∫–∞—é.
–ü—Ä–æ—Å—Ç—ã–µ –ø—Ä–∏–º–µ—Ä—ã –≤—Å–µ –æ—Ç—Ä–∞–±–æ—Ç–∞–ª. –ü–æ—Ç–∏—Ö–æ–Ω—å–∫—É –¥—É–º–∞—é –∫–∞–∫ –ø—Ä–∏–º–µ–Ω–∏—Ç—å –∫ —Å–≤–æ–µ–º—É –ø—Ä–æ–µ–∫—Ç—É...
–í–æ–∑–Ω–∏–∫–∞—é—Ç –≤–æ–ø—Ä–æ—Å—ã, –ø—ã—Ç–∞—é—Å—å –Ω–∞–π—Ç–∏ –æ—Ç–≤–µ—Ç—ã:
1. –Ø —Ç–∞–∫ –ø–æ–Ω–∏–º–∞—é OS_Delay –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è —Ç–æ–ª—å–∫–æ –≤ –∑–∞–¥–∞—á–∞—Ö, –Ω–æ –≤ –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º–∞—Ö (–Ω–∞–ø—Ä–∏–º–µ—Ä —á—Ç–µ–Ω–∏–µ –æ—Ç–ø—Ä–∞–≤–∫–∞ SPI) –º—ã –≤–æ–ª—å–Ω—ã –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –æ–±—ã—á–Ω—ã–π Delay?
2. –ù—É –≤–æ—Ç –≤ –ø—Ä–æ–µ–∫—Ç–µ —É –º–µ–Ω—è –µ—Å—Ç—å –∫—Ä–∏—Ç–∏—á–µ—Å–∫–æ–µ —Å–æ–±—ã—Ç–∏–µ - –ø–æ —Ç–∞–π–º–µ—Ä—É —Ä–∞–∑ –≤ 20–º—Å –Ω—É–∂–Ω–æ –ø—Ä–æ—á–∏—Ç–∞—Ç—å —Å –ø–æ—Å—Ç–æ—è–Ω–Ω—ã–º –∏–Ω—Ç–µ—Ä–≤–∞–ª–æ–º –ø–æ 3 –±–∞–π—Ç–∞ –æ—Ç 3-—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤. –û–±—Ä–∞–±–æ—Ç–∞—Ç—å –º–æ–∂–Ω–æ –ø–æ—Ç–æ–º...
–ï—Å–ª–∏ —É –º–µ–Ω—è –≤–æ –≤—Ä–µ–º—è –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –ø–æ —Ç–∞–π–º–µ—Ä—É –£–ñ–ï –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è –¥–ª–∏–Ω–Ω–∞—è –∑–∞–¥–∞—á–∞ LCD Write, –ø–æ—Å–ª–µ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –º—ã –≤—ã–Ω—É–∂–¥–µ–Ω—ã –µ–µ –∑–∞–∫–æ–Ω—á–∏—Ç—å –¥–æ –≤—ã–∑–æ–≤–∞ —Å–µ—Ä–≤–∏—Å–∞ OS,
–ø—Ä–µ–∂–¥–µ —á–µ–º –ø–æ–ø–∞–¥–µ–º –≤ —Å–ª–µ–¥—É—é—â—É—é –∑–∞–¥–∞—á—É SPI Read. –í–∞—Ä–∏–∞–Ω—Ç—ã -
- SPI Read –¥–µ–ª–∞—Ç—å –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ (–¥–æ 100 –º–∫—Å)
- –î–ª–∏–Ω–Ω—ã–µ –∑–∞–¥–∞—á–∏ —Ç–∏–ø–∞ LCD Write —Ä–∞–∑–±–∏–≤–∞—Ç—å –Ω–∞ –±–æ–ª–µ–µ –º–µ–ª–∫–∏–µ LCD Write Table(–æ–±–Ω–æ–≤–ª–µ–Ω–∏–µ —Ç–∞–±–ª–∏—Ü—ã), LCD Write Text (—Å–ø–∏—Å–æ–∫), LCD Write Variables (–æ–±–Ω–æ–≤–ª–µ–Ω–∏–µ –∑–Ω–∞—á–µ–Ω–∏–π). –ù–æ
—ç—Ç–æ –ø–æ–ª–Ω–æ—Å—Ç—å—é –Ω–µ —Ä–µ—à–∞–µ—Ç –ø—Ä–æ–±–ª–µ–º—É –∏ –¥–æ–±–∞–≤–∏—Ç –º–Ω–æ–≥–æ –Ω–æ–≤—ã—Ö –∑–∞–¥–∞—á - –∫–∞–∫ —Ç–æ –Ω–µ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª—å–Ω–æ.
_________________
–ß—Ç–æ–±—ã –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç –≤—Å—è–∫–∏—Ö –∫–æ—Ç–æ–≤, –ª—É—á—à–µ –≤—Å–µ–≥–æ –æ–±–∑–∞–≤–µ—Å—Ç–∏—Å—å —Å–≤–æ–∏–º —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã–º...
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 11 ] |
|
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ |
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 5 |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|

|
|






