–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 33 –∏–∑ 37
[ –°–æ–æ–±—â–µ–Ω–∏–π: 731 ]
... , , , , , , ,
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∏—é–ª 05, 2024 15:59:53
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ò–ª–∏ halt? –¢–æ –µ—Å—Ç—å reset
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
phalanx
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∏—é–ª 05, 2024 16:41:15
–ù–∞—à–µ–ª —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä. –ü–æ–Ω—é—Ö–∞–ª.
–ö–∞—Ä–º–∞: -8
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 17
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∞–ø—Ä 24, 2021 18:42:11–°–æ–æ–±—â–µ–Ω–∏–π: 155
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ò–ª–∏ halt? –¢–æ –µ—Å—Ç—å reset
–ñ–µ—Å—Ç—å... –ù–µ –≤ –∫–æ–Ω—è –∫–æ—Ä–º.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∏—é–ª 06, 2024 09:30:58
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ê –µ—Å–ª–∏ —Å–µ—Ä—å—ë–∑–Ω–æ, –¥–ª—è —á–µ–≥–æ nop –∏—Å–ø–æ–ª—å–∑—É—é—Ç –≤ –ø—Ä–æ–≥—Ä–∞–º–º–µ? –ü–æ–Ω—è—Ç–Ω–æ, –Ω–∏—á–µ–≥–æ –Ω–µ –¥–µ–ª–∞—Ç—å, –ø—Ä–æ–ø—É—Å–∫ –∫–æ–º–∞–Ω–¥–Ω–æ–≥–æ —Ü–∏–∫–ª–∞, –∑–∞–¥–µ—Ä–∂–∫–∞. –í –∫–∞–∫–∏—Ö —Å–ª—É—á–∞—è—Ö —ç—Ç–æ –º–æ–∂–µ—Ç –ø–æ–Ω–∞–¥–æ–±–∏—Ç—å—Å—è, –ø—Ä–∏–º–µ—Ä –º–æ–∂–Ω–æ? –ï—Å–ª–∏ –≤–Ω–µ—à–Ω–µ–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ, –ø–æ—Ä—Ç –Ω–µ –ø–æ—Å–ø–µ–≤–∞–µ—Ç, –Ω–∞–¥–æ –ü–ü –∑–∞–¥–µ—Ä–∂–∫–∏ –¥–µ–ª–∞—Ç—å, –Ω–∞ nop-–∞—Ö –≤ —Ü–∏–∫–ª–µ –∏–ª–∏ —Ç–∞–π–º–µ—Ä–∞—Ö. –ù–æ –∏–Ω–æ–≥–¥–∞ –≤—Å—Ç—Ä–µ—á–∞–ª–∏—Å—å –ª–∏—Å—Ç–∏–Ω–≥–∏, –æ–¥–∏–Ω-–¥–≤–∞ nop-–∞ –∏ –≤—Å—ë. –ß–µ–≥–æ –æ–Ω–∏ —Ç–∞–º –∑–∞–¥–µ—Ä–∂–∞—Ç?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
veso74
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∏—é–ª 06, 2024 10:02:38
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: 25
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 450
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:24:52–°–æ–æ–±—â–µ–Ω–∏–π: 1645–û—Ç–∫—É–¥–∞: KN34PC, –ë–æ–ª–≥–∞—Ä–∏—è
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
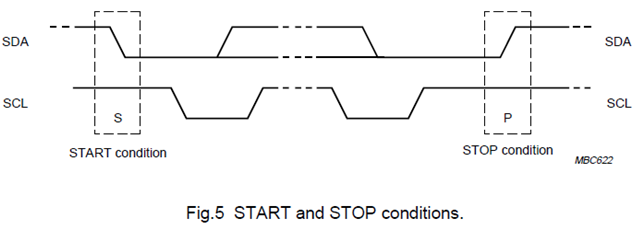
–î–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ –≤ –Ω–µ–º–Ω–æ–≥–∏—Ö —Å–ª—É—á–∞—è—Ö –≤—Å—Ç—Ä–µ—á–∞–ª, –Ω–∏–∂–µ: NOP –Ω–∞–ø—Ä. –≤ start/stop I2c, —á—Ç–æ–±—ã —É—Å–ª–æ–≤–∏–µ –±—ã–ª–æ –≤—ã–ø–æ–ª–Ω–µ–Ω–æ.
- —Ç—Ä–µ–±–æ–≤–∞–Ω–∏–µ –∏–∑ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ I2c
- —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç—ã —Å–æ HW Fast-mode plus I2c –≤ PIC18F06Q40, –∏–∑–º–µ—Ä–µ–Ω–Ω—ã–µ –¥–∞–Ω–Ω—ã–µ –æ—Ç –ª–æ–≥–∏—á–µ—Å–∫–æ–≥–æ –∞–Ω–∞–ª–∏–∑–∞—Ç–æ—Ä–∞
.lst —Ñ–∞–π–ª:
–ö–æ–¥:
.................... i2c_start();
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Martian
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∏—é–ª 06, 2024 10:19:37
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ö–∞–∫ –º–∏–Ω–∏–º—É–º, –¥–ª—è –ø–æ–¥–º–µ–Ω—ã –∫–æ–º–∞–Ω–¥—ã –ø—Ä–∏ –≤–µ—Ç–≤–ª–µ–Ω–∏–∏, –¥–ª—è –≤—ã—Ä–∞–≤–Ω–∏–≤–∞–Ω–∏—è, –¥–ª—è —Ç–æ–≥–æ, —á—Ç–æ–±—ã –ø–æ–¥–æ–∂–¥–∞—Ç—å, –ø–æ–∫–∞ –∫–∞–∫–∞—è-—Ç–æ –æ–¥–Ω–∞ –∞–ø–ø–∞—Ä–∞—Ç–Ω–∞—è —á–∞—Å—Ç—å –¥–æ–≥–æ–Ω–∏—Ç –¥—Ä—É–≥—É—é.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∏—é–ª 06, 2024 11:07:15
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ö–∞–∫ –º–∏–Ω–∏–º—É–º, –¥–ª—è –ø–æ–¥–º–µ–Ω—ã –∫–æ–º–∞–Ω–¥—ã –ø—Ä–∏ –≤–µ—Ç–≤–ª–µ–Ω–∏–∏, –¥–ª—è –≤—ã—Ä–∞–≤–Ω–∏–≤–∞–Ω–∏—è
–ú–æ–∂–Ω–æ —ç—Ç–æ—Ç –º–æ–º–µ–Ω—Ç –ø—Ä–æ—è—Å–Ω–∏—Ç—å? –ö–∞–∫–∏–µ –∫–æ–º–∞–Ω–¥—ã –ø–æ–¥–º–µ–Ω—è—Ç—å, –µ—Å–ª–∏ –æ–¥–Ω–æ —É—Å–ª–æ–≤–∏–µ - –∑–Ω–∞—á–∏—Ç –¥–µ–ª–∞—Ç—å —Ç–æ, –¥—Ä—É–≥–æ–µ - —ç—Ç–æ. –ò –ø—Ä–æ –≤—ã—Ä–∞–≤–Ω–∏–≤–∞–Ω–∏–µ. –ü–æ–∏—Å–∫ –ø—Ä–µ–¥–ª–∞–≥–∞–µ—Ç –≤—ã—Ä–∞–≤–Ω–∏–≤–∞–Ω–∏–µ —Ñ–æ—Ç–æ.
–ê –∫—Å—Ç–∞—Ç–∏, –≤ –ø—Ä–æ–±–ª–µ–º–µ RMW NOP –º–æ–∂–µ—Ç –ø–æ–º–æ—á—å?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
–ö–Ý–ê–ú
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∏—é–ª 06, 2024 11:23:47
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 139
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2918
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —è–Ω–≤ 10, 2008 22:01:02–°–æ–æ–±—â–µ–Ω–∏–π: 23988–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–æ–≤—Å–∫–∞—è –æ–±–ª–∞—Å—Ç—å, –§—Ä—è–∑–∏–Ω–æ
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ò –ø—Ä–æ –≤—ã—Ä–∞–≤–Ω–∏–≤–∞–Ω–∏–µ.
–£—Å–ª–æ–≤–Ω–æ–µ –≤–µ—Ç–≤–ª–µ–Ω–∏–µ –∏–º–µ–µ—Ç —Ä–∞–∑–Ω–æ–µ –≤—Ä–µ–º—è –∏—Å–ø–æ–ª–Ω–µ–Ω–∏—è, –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏ —ç—Ç–æ–≥–æ —Å–∞–º–æ–≥–æ –≤–µ—Ç–≤–ª–µ–Ω–∏—è. –ï—Å–ª–∏ –∫–æ–¥ –ø—Ä–æ–¥–æ–ª–∂–∞–µ—Ç –ª–∏–Ω–µ–π–Ω–æ–µ –∏—Å–ø–æ–ª–Ω–µ–Ω–∏–µ, —Ç–æ –≤—Ä–µ–º—è —Ä–∞–≤–Ω–æ 1 —Ü–∏–∫–ª—É, –∞ –µ—Å–ª–∏ –ø—Ä–æ–∏–∑–æ—à–µ–ª –ø–µ—Ä–µ—Ö–æ–¥, —Ç–æ 2 —Ü–∏–∫–ª–∞–º. –ü—É—Å—Ç—ã–µ –∏–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏ –ø–æ–∑–≤–æ–ª—è—é—Ç –≤—ã—Ä–æ–≤–Ω—è—Ç—å –æ–±–∞ –≤–∞—Ä–∏–∞–Ω—Ç–∞ –∏ –æ–±–µ—Å–ø–µ—á–∏—Ç—å –æ—Ç—Å—É—Ç—Å—Ç–≤–∏–µ –¥–∂–∏—Ç—Ç–µ—Ä–∞ –≤—Ä–µ–º–µ–Ω–Ω–û–π –¥–∏–∞–≥—Ä–∞–º–º—ã –Ω–∞ —ç—Ç–æ–º —É—á–∞—Å—Ç–∫–µ.
–¢–∞–∫ –∂–µ –ø—É—Å—Ç—ã–µ –∏–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏ –ø–æ–∑–≤–æ–ª—è—é—Ç —Ñ–æ—Ä–º–∏—Ä–æ–≤–∞—Ç—å –∏–º–ø—É–ª—å—Å—ã –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–Ω–æ–π –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –Ω–æ–≥–æ–¥—Ä—ã–≥–æ–º. –û–±—ã—á–Ω–æ —Ç–∞–∫ –¥–µ–ª–∞—é—Ç –ø—Ä–∏ –∫–æ—Ä–æ—Ç–∫–∏—Ö –∏–º–ø—É–ª—å—Å–∞—Ö –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å—é –≤ –Ω–µ—Å–∫–æ–ª—å–∫–æ –º–∞—à–∏–Ω–Ω—ã—Ö —Ü–∏–∫–ª–æ–≤.
–í 16-—Ä–∞–∑—Ä—è–¥–Ω–æ–π –ø–ª–∞—Ç—Ñ–æ—Ä–º–µ (PIC24/dsPIC) nop-—ã –ø—Ä–∏–º–µ–Ω—è—é—Ç –¥–ª—è –∑–∞–¥–µ—Ä–∂–µ–∫ –≤ —Ü–∏–∫–ª–∞—Ö —Å RAW-–∏–Ω—Å—Ç—Ä—É–∫—Ü–∏—è–º–∏. –ù–µ –ø—É—Ç–∞—Ç—å —Å RMW.
–ö –Ω–∏–º –æ—Ç–Ω–æ—Å—è—Ç—Å—è –∏–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏ —Å –∞–≤—Ç–æ–∏–Ω–∫—Ä–µ–º–µ–Ω—Ç–Ω—ã–º–∏/–∞–≤—Ç–æ–¥–µ–∫—Ä–µ–º–µ–Ω—Ç–Ω—ã–º–∏ –∞–¥—Ä–µ—Å–∞—Ü–∏—è–º–∏.
–ê –∫—Å—Ç–∞—Ç–∏, –≤ –ø—Ä–æ–±–ª–µ–º–µ RMW NOP –º–æ–∂–µ—Ç –ø–æ–º–æ—á—å?
–ù–µ—Ç.
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å –ö–Ý–ê–ú –°–± –∏—é–ª 06, 2024 11:33:18, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 1 —Ä–∞–∑.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∏—é–ª 06, 2024 11:30:02
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ª–∏–Ω–µ–π–Ω–æ–µ –∏—Å–ø–æ–ª–Ω–µ–Ω–∏–µ, —Ç–æ –≤—Ä–µ–º—è —Ä–∞–≤–Ω–æ 1 —Ü–∏–∫–ª—É, –∞ –µ—Å–ª–∏ –ø—Ä–æ–∏–∑–æ—à–µ–ª –ø–µ—Ä–µ—Ö–æ–¥, —Ç–æ 2 —Ü–∏–∫–ª–∞–º. –ü—É—Å—Ç—ã–µ –∏–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏ –ø–æ–∑–≤–æ–ª—è—é—Ç –≤—ã—Ä–æ–≤–Ω—è—Ç—å –æ–±–∞ –≤–∞—Ä–∏–∞–Ω—Ç–∞
–õ–æ–≥–∏—á–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –∏—é–ª 09, 2024 19:06:29
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ö–æ–¥:
incrementing of Timer0 (TMR0 and Prescaler) will also be inhibited 2 instruction cycles (TCY). So if the prescaler is configured as 2, then after a write to the TMR0 register TMR0 will not increment for 4 Timer0 clocks (Figure 11-3). After that, TMR0 will increment every prescaler number of clocks later.
–ê –µ—Å–ª–∏ –ø—Ä–µ–¥–¥–µ–ª–∏—Ç–µ–ª—å –Ω–∞—Å—Ç—Ä–æ–µ–Ω 1:256, –ø—Ä–æ–ø—É—Å–∫ 512 –∫–ª–æ–∫—Å–æ–≤? –ò –≤–æ–æ–±—â–µ, –Ω–µ –ø—Ä–æ—Ç–∏–≤–æ—Ä–µ—á–∞—Ç –ª–∏ –æ–Ω–∏ —Å–∞–º–∏ —Å–µ–±–µ: —Å –æ–¥–Ω–æ–π —Å—Ç–æ—Ä–æ–Ω—ã, –∫–∞–∫ –æ–Ω–∏ –≥–æ–≤–æ—Ä—è—Ç —Ä–∞–Ω—å—à–µ, –ø—Ä–∏ –∑–∞–ø–∏—Å–∏ –≤ TMR0 –ø—Ä–µ–¥–¥–µ–ª–∏—Ç–µ–ª—å —Å–±—Ä–∞—Å—ã–≤–∞–µ—Ç—Å—è, –∞ —Ç—É—Ç –æ–Ω, –æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è, —É–∂–µ –Ω–∞—Å—Ç—Ä–æ–µ–Ω 1:2 –∏ –ø—Ä–∏ –∑–∞–ø–∏—Å–∏ –≤ TMR –∑–∞–¥–µ—Ä–∂–∫–∞ 4 –∫–ª–æ–∫—Å–∞, –∏ –æ–Ω –Ω–µ —Å–±—Ä–∞—Å—ã–≤–∞–µ—Ç—Å—è, –ø–æ–ª—É—á–∞–µ—Ç—Å—è.
–ö–∞–∫ –±—ã —Ç–∞–º –Ω–∏ –±—ã–ª–æ, –Ω–∞–¥–æ, –∑–Ω–∞—á–∏—Ç, —Å–Ω–∞—á–∞–ª–∞ –∑–∞–ø–∏—Å–∞—Ç—å TMR, –∞ –ø–æ—Ç–æ–º –ø—Ä–µ–¥–¥–µ–ª–∏—Ç–µ–ª—å. –ò –Ω–∏–∫–∞–∫–∏—Ö –ø—Ä–æ–±–ª–µ–º? –í —Å–º—ã—Å–ª–µ –ø—Ä–æ–ø—É—Å–∫–æ–≤ –∫–ª–æ–∫—Å–æ–≤?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
–ö–Ý–ê–ú
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –∏—é–ª 09, 2024 20:33:06
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 139
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2918
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —è–Ω–≤ 10, 2008 22:01:02–°–æ–æ–±—â–µ–Ω–∏–π: 23988–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–æ–≤—Å–∫–∞—è –æ–±–ª–∞—Å—Ç—å, –§—Ä—è–∑–∏–Ω–æ
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
Clock - —ç—Ç–æ –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω–æ–µ —á–∏—Å–ª–æ
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
BOB51
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –∏—é–ª 09, 2024 20:34:43
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 96
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1472
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 16, 2010 22:02:27–°–æ–æ–±—â–µ–Ω–∏–π: 15136–û—Ç–∫—É–¥–∞: –î–û–ù–ï–¶–ö
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
https://web.archive.org/web/20080221231 ... c16_11.pdf —Å—Ç—Ä–∞–Ω–∏—á–∫–∞ 6...
–Ý–µ—á—å –æ 4 —Ü–∏–∫–ª–∞—Ö –ø—Ä–∏ –≤–Ω—É—Ç—Ä–µ–Ω–Ω–µ–º —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏–∏.
–°–æ–±—Å—Ç–≤–µ–Ω–Ω–æ –ø—Ä–µ–¥–¥–µ–ª–∏—Ç–µ–ª—å T0 –¥–µ–ª–∏—Ç —Å WDT –∏ —Ç–∞–º –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ –ø–æ –≤—ã–±—Ä–∞–Ω–Ω–æ–º—É –ú–ö –ø–æ—á–∏—Ç–∞—Ç—å –Ω–µ –ø–æ–º–µ—à–∞–µ—Ç. –ò–Ω–æ–≥–¥–∞ –≤–∫–ª—é—á–∞—è –µ—Ä—Ä–∞—Ç—ã.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∏—é–ª 10, 2024 11:43:07
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ê —Ç–æ –≤–∞—à–∏ –∫–ª–æ–∫—Å—ã –∑–≤—É—á–∞—Ç –≥–æ–º–µ—Ä–∏—á–µ—Å–∫–∏ —Å–º–µ—à–Ω–æ.
–°–º–µ—Ö –ø—Ä–æ–¥–ª–µ–≤–∞–µ—Ç –∂–∏–∑–Ω—å! –ù–û –í–∞–º, –ø–æ-–º–æ–µ–º—É, –Ω–µ —Å–º–µ—à–Ω–æ)) –≠—Ç–æ –≥—Ä—É—Å—Ç–Ω–æ
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Martian
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∏—é–ª 10, 2024 11:54:18
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∫–ª–æ–∫—Å—ã
–¥–≤—É–º–µ—Ä–Ω—ã–π –º–∞—Å—Å–∏–≤ –∫–ª–æ–∫–æ–≤
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∏—é–ª 10, 2024 14:09:03
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–û–±–Ω–∞—Ä—É–∂–∏–ª –æ—à–∏–±–∫—É –≤ –ø—Ä–µ–¥—ã–¥—É—â–µ–º –æ–ø–∏—Å–∞–Ω–∏–∏. –¢–æ —Å–æ–æ–±—â–µ–Ω–∏–µ –Ω–∏–∫–∞–∫ —É–¥–∞–ª–∏—Ç—å –Ω–µ –º–æ–≥—É—Ç.
–ü—Ä–∏–¥—É–º–∞–ª —Å–ø–æ—Å–æ–± –ø—Ä–µ–≤—Ä–∞—â–µ–Ω–∏—è 8 –±–∏—Ç —Ç–∞–π–º–µ—Ä–∞ –≤ 16 –±–∏—Ç. –û—Å–Ω–æ–≤–∞–Ω–æ –Ω–∞ –¥–∏–Ω–∞–º–∏—á–µ—Å–∫–æ–º –≤—ã—á–∏—Å–ª–µ–Ω–∏–∏ –∑–Ω–∞—á–µ–Ω–∏—è –ø—Ä–µ–¥–¥–µ–ª–∏—Ç–µ–ª—è.
–°–≤–æ–π—Å—Ç–≤–∞:
1) —Ç–æ—á–Ω–æ—Å—Ç—å –æ—Ç—Å—á—ë—Ç–∞ - –¥–µ—Å—è—Ç–∫–∏ —Ç–∏–∫–æ–≤
2) –¥–∏—Å–∫—Ä–µ—Ç–Ω–æ—Å—Ç—å –æ—Ç—Å—á—ë—Ç–∞ - 1 —Ç–∏–∫
3) –¥–∏–∞–ø–∞–∑–æ–Ω 64–ö —Ç–∞–∫—Ç–æ–≤, –∫–∞–∫ —É 16 –±–∏—Ç –±–µ–∑ –¥–µ–ª–∏—Ç–µ–ª—è
–ú–∏–Ω—É—Å—ã:
1) –±–æ–ª—å—à–µ–µ –≤—Ä–µ–º—è –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏–∏
...
–ö–æ–¥:
–î–∞–Ω–æ: 16–±–∏—Ç —á–∏—Å–ª–æ 0x4321
–û—à–∏–±–∫–∞ 21 —Ç–∏–∫, —á—Ç–æ –Ω–∞ –µ–¥–∏–Ω–∏—Ü–∞—Ö –∏ –¥–µ—Å—è—Ç–∫–∞—Ö –º–∏–ª–ª–∏—Å–µ–∫—É–Ω–¥ –æ—á–µ–Ω—å –¥–∞–∂–µ –Ω–µ—á—É–≤—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ.
–ò–∑ FF –≤—ã—á–∏—Ç–∞—Ç—å –∫–æ–ª-–≤–æ —Ü–∏–∫–ª–æ–≤, —Ç–∞–∫ –∫–∞–∫ —Ç–∞–π–º–µ—Ä —Å—á–∏—Ç–∞–µ—Ç –æ—Ç –Ω—É–ª—è.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
phalanx
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∏—é–ª 11, 2024 04:12:54
–ù–∞—à–µ–ª —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä. –ü–æ–Ω—é—Ö–∞–ª.
–ö–∞—Ä–º–∞: -8
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 17
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∞–ø—Ä 24, 2021 18:42:11–°–æ–æ–±—â–µ–Ω–∏–π: 155
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
...
–ê –∫—Å—Ç–∞—Ç–∏, –≤ –ø—Ä–æ–±–ª–µ–º–µ RMW NOP –º–æ–∂–µ—Ç –ø–æ–º–æ—á—å?
–ù–µ—Ç.
–í—Å—é –≤–µ—Ç–∫—É –Ω–µ —á–∏—Ç–∞–ª, –Ω–æ –¥–ª—è PIC –±–µ–∑ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ LAT –≤ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö —Å–ª—É—á–∞—è—Ö NOP –æ—á–µ–Ω—å –¥–∞–∂–µ –º–æ–∂–µ—Ç –ø–æ–º–æ—á—å. –í–æ—Ç —Ö–æ—Ä–æ—à–∞—è —Å—Ç–∞—Ç—å—è –Ω–∞ —Ç–µ–º—É RMW:
https://electrosome.com/read-modify-write-problem-pic/ –ö–æ–≥–¥–∞ –ø—Ä–æ–±–ª–µ–º–∞ RMW –º–æ–∂–µ—Ç –≤–æ–∑–Ω–∏–∫–Ω—É—Ç—å:
–¶–∏—Ç–∞—Ç–∞:
The actual physical state (voltage level) of a pin may be different from the value written to PORT register in certain instances. For example:
–ò –≤–æ–∑–º–æ–∂–Ω—ã–µ –≤–∞—Ä–∏–∞–Ω—Ç—ã —Ä–µ—à–µ–Ω–∏—è –ø—Ä–æ–±–ª–µ–º—ã:
–¶–∏—Ç–∞—Ç–∞:
...
–≠—Ç–∏–º "delay" –∫–∞–∫ —Ä–∞–∑ –∏ –º–æ–∂–µ—Ç —Å—Ç–∞—Ç—å NOP. –ù–æ —ç—Ç–æ, –ø–æ–≤—Ç–æ—Ä—é—Å—å, —Å–ø—Ä–∞–≤–µ–¥–ª–∏–≤–æ –ª–∏—à—å –≤ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö —Å–ª—É—á–∞—è—Ö, –æ—Å–æ–±–µ–Ω–Ω–æ —É –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö :-D. –ù–æ—Ä–º–∞–ª—å–Ω–∞—è —Å—Ö–µ–º–æ—Ç–µ—Ö–Ω–∏–∫–∞ –ø–æ–∑–≤–æ–ª–∏—Ç –Ω–µ –ø—Ä–∏–±–µ–≥–∞—Ç—å –∫ —Ç–∞–∫–∏–º —Ç—Ä—é–∫–∞–º, —ç—Ç–æ —á–∏—Å—Ç–æ –¥–ª—è —Ç–µ–æ—Ä–∏–∏. –£ –ø–µ—Ä–≤—ã—Ö PIC –±—ã–ª–∞ –µ—â–µ –∏—Å—Ç–æ—Ä–∏—è —Å–≤—è–∑–∞–Ω–Ω–∞—è —Å –∫–æ–Ω–≤–µ–µ—Ä–æ–º, –≥–¥–µ –º–æ–≥ –ø–æ—Ç—Ä–µ–±–æ–≤–∞—Ç—å—Å—è NOP:
http://www.amber.ssau.ru/download/PIC16_Manual.pdf –ø.9.10.2. –ü–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ—Å—Ç—å –æ–ø–µ—Ä–∞—Ü–∏–π —Å –ø–æ—Ä—Ç–∞–º–∏ –≤–≤–æ–¥–∞/–≤—ã–≤–æ–¥–∞
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∏—é–ª 12, 2024 16:26:02
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü—Ä–æ –ø–æ–¥–∞–≤–ª–µ–Ω–∏–µ –¥—Ä–µ–±–µ–∑–≥–∞ –∏ –ø–∞—Ä–∞–∑–∏—Ç–Ω—ã—Ö —Å–∫–∞—á–∫–æ–≤ –Ω–∞ —Å–∫–∞–Ω–∏—Ä—É–µ–º—ã—Ö –≤—Ö–æ–¥–∞—Ö: –∫–∞–∫-—Ç–æ –≥–æ–≤–æ—Ä–∏–ª–∏, –∏ –Ω–∞–∑—ã–≤–∞–ª–∏—Å—å —Ü–∏—Ñ—Ä—ã, —á—Ç–æ –ø—Ä–∏ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏—Ö –∫–Ω–æ–ø–∫–∞—Ö –ø–æ—Ä—è–¥–∫–∞ 20–º—Å, –Ω–∞ –æ–ø—Ç–æ–¥–∞—Ç—á–∏–∫–∞—Ö –≤—Ä–æ–¥–µ –º–µ–Ω—å—à–µ, –Ω–æ —Ç–æ–∂–µ –æ–∫–æ–ª–æ –µ–¥–∏–Ω–∏—Ü –º–∏–ª–ª–∏—Å–µ–∫—É–Ω–¥. –ï—Å–ª–∏ –ø–∞–º—è—Ç—å –Ω–µ –∏–∑–º–µ–Ω—è–µ—Ç. –ê –∫–∞–∫ –±—ã—Ç—å, –µ—Å–ª–∏ –ø–µ—Ä–∏–æ–¥ –º–µ–∂–¥—É –∏–º–ø—É–ª—å—Å–∞–º–∏ (–º–µ–∂–¥—É –Ω–∞–∂–∞—Ç–∏—è–º–∏, –º–æ–∂–Ω–æ —Å—á–∏—Ç–∞—Ç—å) —Å–∞–º –ø–æ —Å–µ–±–µ 5–º—Å?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–ö–Ý–ê–ú
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∏—é–ª 12, 2024 17:21:10
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 139
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2918
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —è–Ω–≤ 10, 2008 22:01:02–°–æ–æ–±—â–µ–Ω–∏–π: 23988–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–æ–≤—Å–∫–∞—è –æ–±–ª–∞—Å—Ç—å, –§—Ä—è–∑–∏–Ω–æ
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ê –∫–∞–∫ –±—ã—Ç—å, –µ—Å–ª–∏ –ø–µ—Ä–∏–æ–¥ –º–µ–∂–¥—É –∏–º–ø—É–ª—å—Å–∞–º–∏ (–º–µ–∂–¥—É –Ω–∞–∂–∞—Ç–∏—è–º–∏, –º–æ–∂–Ω–æ —Å—á–∏—Ç–∞—Ç—å) —Å–∞–º –ø–æ —Å–µ–±–µ 5–º—Å?
–ß—Ç–æ —ç—Ç–æ –∑–∞ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏–π –¥–∞—Ç—á–∏–∫ —Å –ø–µ—Ä–∏–æ–¥–æ–º 5 –º—Å?
–í –ª—é–±–æ–º —Å–ª—É—á–∞–µ, —Ç–∞–∫–æ–π "–∞–≤—Ç–æ–º–æ–±–∏–ª—å" –Ω–µ –ø–æ–µ–¥–µ—Ç.
–û–ø—Ç–æ–¥–∞—Ç—á–∏–∫–∏ –¥—Ä–µ–±–µ–∑–≥–∞ –Ω–µ –∏–º–µ—é—Ç, –≤ –æ—Ç–ª–∏—á–∏–∏ –æ—Ç –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏—Ö. –¢–∞–º –≤–æ–ø—Ä–æ—Å —Ä–µ—à–∞–µ—Ç—Å—è –ø—Ä–æ—Å—Ç—ã–º –≥–∏—Å—Ç–µ—Ä–µ–∑–∏—Å–æ–º —Ç—Ä–∏–≥–≥–µ—Ä–∞ –®–º–∏—Ç—Ç–∞ –∏–ª–∏ –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä–∞.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∏—é–ª 12, 2024 17:34:04
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ß—Ç–æ —ç—Ç–æ –∑–∞ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏–π –¥–∞—Ç—á–∏–∫ —Å –ø–µ—Ä–∏–æ–¥–æ–º 5 –º—Å?
–ì–¥–µ —è —Ç–∞–∫–æ–µ –Ω–∞–ø–∏—Å–∞–ª? –í–Ω–∏–º–∞—Ç–µ–ª—å–Ω–µ–µ —á–∏—Ç–∞–π—Ç–µ —Å–æ–æ–±—â–µ–Ω–∏—è))
–û–ø—Ç–æ–¥–∞—Ç—á–∏–∫–∏ –¥—Ä–µ–±–µ–∑–≥–∞ –Ω–µ –∏–º–µ—é—Ç, –≤ –æ—Ç–ª–∏—á–∏–∏ –æ—Ç –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏—Ö.
–ù–∞ –∫—Ä–∏–≤–æ –æ–±—Ä–µ–∑–∞–Ω–Ω–æ–π —à—Ç–æ—Ä–∫–µ, –¥–∞ –ø—Ä–∏ –æ—Ç—Ä–∞–∂–µ–Ω–∏—è—Ö –æ—Ç –Ω–µ—ë, –º–æ–≥—É—Ç –±—ã—Ç—å —è–≤–ª–µ–Ω–∏—è, –ø–æ–¥–æ–±–Ω—ã–µ –¥—Ä–µ–±–µ–∑–≥—É. –ù–∞–∑–æ–≤—ë–º –∏—Ö "–ø–∞—Ä–∞–∑–∏—Ç–Ω—ã–º–∏ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–Ω–∏—è–º–∏".
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Martian
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∏—é–ª 12, 2024 17:36:12
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü—Ä–æ –ø–æ–¥–∞–≤–ª–µ–Ω–∏–µ –¥—Ä–µ–±–µ–∑–≥–∞ –∏ –ø–∞—Ä–∞–∑–∏—Ç–Ω—ã—Ö —Å–∫–∞—á–∫–æ–≤ –Ω–∞ —Å–∫–∞–Ω–∏—Ä—É–µ–º—ã—Ö –≤—Ö–æ–¥–∞—Ö: –∫–∞–∫-—Ç–æ –≥–æ–≤–æ—Ä–∏–ª–∏, –∏ –Ω–∞–∑—ã–≤–∞–ª–∏—Å—å —Ü–∏—Ñ—Ä—ã, —á—Ç–æ –ø—Ä–∏ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏—Ö –∫–Ω–æ–ø–∫–∞—Ö –ø–æ—Ä—è–¥–∫–∞ 20–º—Å
—á–∏—Å–ª–æ –º–æ–∂–µ—Ç –±—ã—Ç—å –∏ —Ç—Ä–µ—Ö–∑–Ω–∞—á–Ω—ã–º, –∑–∞–≤–∏—Å–∏—Ç –æ—Ç –∫–Ω–æ–ø–∫–∏
–ö–Ý–ê–ú –ø–∏—Å–∞–ª(–∞):
–ß—Ç–æ —ç—Ç–æ –∑–∞ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏–π –¥–∞—Ç—á–∏–∫ —Å –ø–µ—Ä–∏–æ–¥–æ–º 5 –º—Å?
–≥–µ—Ä–∫–æ–Ω? –≤–æ–∑–º–æ–∂–Ω–æ, —Ç–æ—Ç —É—Å–ø–µ–µ—Ç –æ—Ç–¥—Ä–µ–±–µ–∑–∂–∞—Ç—å
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
yor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –í–æ–ø—Ä–æ—Å—ã –Ω–∞—á–∏–Ω–∞—é—â–∏—Ö PIC ASM
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∏—é–ª 12, 2024 17:41:28
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 84
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 19, 2008 23:57:27–°–æ–æ–±—â–µ–Ω–∏–π: 1675
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ß–µ–º—É –≤—ã —É–¥–∏–≤–ª—è—á–µ—Ç—Å—å, —Ö–æ—Ç—å —è –∏ –Ω–µ –ø–∏—Å–∞–ª –æ–± —ç—Ç–æ–º, –Ω–æ –∫–æ–Ω—Ç–∞–∫—Ç—ã –ø—Ä–µ—Ä—ã–≤–∞—Ç–µ–ª—è –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏–µ, –¥–∞, –≤–ø–æ–ª–Ω–µ —Å–µ–±–µ —Ä–∞–±–æ—Ç–∞—é—Ç –¥–æ 6000-8000—Ç—ã—Å. –æ–±–æ—Ä–æ—Ç–æ–≤, –∞ —ç—Ç–æ –ø–µ—Ä–∏–æ–¥ 5-3–º—Å —É 2–¶/2–¢ –º–æ—Ç–æ—Ä–∞.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 33 –∏–∑ 37
[ –°–æ–æ–±—â–µ–Ω–∏–π: 731 ]
... , , , , , , ,
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 65
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è