|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 2 –∏–∑ 3
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 48 ] |
, , |
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
rusman159

|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 16, 2024 22:26:40 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –¥–µ–∫ 09, 2011 18:31:13
–°–æ–æ–±—â–µ–Ω–∏–π: 56
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–í PIC12f508 TMR0 —Å —ç—Ç–∏–º —Å–ø—Ä–∞–≤–∏—Ç—Å—è?
–ü—ã—Ç–∞—é—Å—å —Ä–∞–∑–æ–±—Ä–∞—Ç—å—Å—è –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–µ –∏ –∑–∞–ø—É—Å–∫–µ —Ç–∞–π–º–µ—Ä–∞ –Ω–∞ pic12f508
–ò–∑ –º–∞–Ω—É–∞–ª–∞
–Ý–µ–∂–∏–º –¢–∞–π–º–µ—Ä–∞ –≤—ã–±–∏—Ä–∞–µ—Ç—Å—è —Å–±—Ä–æ—Å–æ–º –±–∏—Ç–∞ T0CS (OPTION 5). –í —Ä–µ–∂–∏–º–µ —Ç–∞–π–º–µ—Ä–∞, –º–æ–¥—É–ª—å Timer0 –∏–Ω–∫—Ä–µ–º–µ–Ω–∏—Ä—É–µ—Ç—Å—è –∫–∞–∂–¥—ã–π –º–∞—à–∏–Ω–Ω—ã–π —Ü–∏–∫–ª (–±–µ–∑ –ü–î). –ü–æ—Å–ª–µ –∑–∞–ø–∏—Å–∏ –≤ —Ä–µ–≥–∏—Å—Ç—Ä TMR0 –µ–≥–æ –∏–Ω–∫—Ä–µ–º–µ–Ω—Ç–∞—Ü–∏—è –∑–∞–¥–µ—Ä–∂–∏–≤–∞–µ—Ç—Å—è –Ω–∞ —Å–ª–µ–¥—É—é—â–∏–µ –¥–≤–∞ —Ü–∏–∫–ª–∞ (–Ý–∏—Å 6-2 –∏ –Ý–∏—Å. 6-3). –ü–æ–¥—Ä–æ–±–Ω–æ–µ –æ–ø–∏—Å–∞–Ω–∏–µ —Å–º–æ—Ç—Ä–µ—Ç—å –≤ —Ä—É–∫–æ–≤–æ–¥—Å—Ç–≤–µ –ø–æ PIC16C8X. –ü–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—å –º–æ–∂–µ—Ç —ç—Ç–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å, –¥–ª—è –∑–∞–ø–∏—Å–∏ –∏ –∫–æ—Ä—Ä–µ–∫—Ü–∏–∏ –∑–Ω–∞—á–µ–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–∞. –Ý–µ–∂–∏–º —Å—á–µ—Ç—á–∏–∫–∞ –≤—ã–±–∏—Ä–∞–µ—Ç—Å—è —É—Å—Ç–∞–Ω–æ–≤–∫–æ–π –±–∏—Ç–∞ T0CS (OPTION < 5 >). –í —ç—Ç–æ–º —Ä–µ–∂–∏–º–µ, Timer0 –∏–Ω–∫—Ä–µ–º–µ–Ω–∏—Ä—É–µ—Ç—Å—è –ø–æ —Ñ—Ä–æ–Ω—Ç—É –∏–ª–∏ —Å–ø–∞–¥—É –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ –Ω–∞ –≤—ã–≤–æ–¥–µ T0CKI. –ë–∏—Ç T0SE (OPTION < 4 >) –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç —Ñ—Ä–æ–Ω—Ç –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è. –£—Å—Ç–∞–Ω–æ–≤–∫–∞ –±–∏—Ç–∞ T0SE –≤—ã–∑—ã–≤–∞–µ—Ç –∏–Ω–∫—Ä–µ–º–µ–Ω—Ç –¢–° –ø–æ —Å–ø–∞–¥—É –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞.
–Ý–ï–ì–ò–°–¢–Ý OPTION
Bit5: T0CS: Timer0 –≤—ã–±–æ—Ä –∏—Å—Ç–æ—á–Ω–∏–∫–∞ —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è 1 = –° –≤–Ω–µ—à–Ω–µ–≥–æ –≤—ã–≤–æ–¥–∞ GP2 / T0CKI, 0 = –í–Ω—É—Ç—Ä–µ–Ω–Ω—è—è —á–∞—Å—Ç–æ—Ç–∞, Fosc/4
Bit4: T0SE: выбор фронта переключения Timer0 1 = Инкремент при переходе с “1”на “0” на выводе T0CKI,, 0 = Инкремент при переходе с “0”на “1” на выводе T0CKI
–ò–º–ø—É–ª—å—Å—ã –Ω—É–∂–Ω–æ –ø–æ–¥–∞–≤–∞—Ç—å —Ç–æ–ª—å–∫–æ –Ω–∞ –Ω–æ–≥—É T0CKI –∏–ª–∏ –º–æ–∂–Ω–æ –Ω–∞ –ª—é–±—É—é –¥—Ä—É–≥—É—é GP0, 1, –∏ —Ç–¥?
Bit3: PSA: –ë–∏—Ç –Ω–∞–∑–Ω–∞—á–µ–Ω–∏—è –ø—Ä–µ–¥–≤–∞—Ä–∏—Ç–µ–ª—å–Ω–æ–≥–æ –¥–µ–ª–∏—Ç–µ–ª—è (–ü–î) 1 = –ü—Ä–µ–¥–≤–∞—Ä–∏—Ç–µ–ª—å–Ω—ã–π –¥–µ–ª–∏—Ç–µ–ª—å –≤–∫–ª—é—á–µ–Ω –ø–æ—Å–ª–µ WDT 0 = –ü—Ä–µ–¥–≤–∞—Ä–∏—Ç–µ–ª—å–Ω—ã–π –¥–µ–ª–∏—Ç–µ–ª—å –≤–∫–ª—é—á–µ–Ω –ø–µ—Ä–µ–¥ Timer0 Bit2-0: PS2-PS0: –í—ã–±–æ—Ä –∫–æ—ç—Ñ.–¥–µ–ª–µ–Ω–∏—è –ü–î
–ù—É–∂–Ω–æ –≤–∫–ª—é—á–∞—Ç—å –¥–µ–ª–∏—Ç–µ–ª—å?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
RoboC
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 08:11:09 |
|
| –ú—É–¥—Ä—ã–π –∫–æ—Ç |
 |
–ö–∞—Ä–º–∞: 27
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 656
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–ø—Ä 04, 2012 09:55:53
–°–æ–æ–±—â–µ–Ω–∏–π: 1789
–û—Ç–∫—É–¥–∞: –°–µ–≤–µ—Ä–æ–¥–æ–Ω–µ—Ü–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–° –º–∞–∫—Å–∏–º–∞–ª—å–Ω—ã–º –¥–µ–ª–∏—Ç–µ–ª–µ–º —Ç–∞–π–º–µ—Ä –ø–µ—Ä–µ–ø–æ–ª–Ω–∏—Ç—Å—è –∑–∞ 1/15—Å . –ó–∞–±—É–¥—å—Ç–µ –≤ –ø—Ä–æ —Ç–∞–π–º–µ—Ä –≤ —ç—Ç–æ–º –º–∫ –≤ –æ—Ç–Ω–æ—à–µ–Ω–∏–∏ –∫ –≤–∞—à–µ–π –∑–∞–¥–∞—á–µ.
–Ý–∞–∑–±–µ—Ä–∏—Ç–µ—Å—å —Å –∞–ª–≥–æ—Ä–∏—Ç–º–∞–º–∏ –ø—Ä–µ–¥–ª–æ–∂–Ω—ã–º–∏ –º–Ω–æ–π –∏ –æ–ø–∏—Å–∞–Ω–Ω—ã–º Martian.
–ó–∞ –≤–∞—Å –∫–æ–¥ –Ω–∏–∫—Ç–æ –Ω–µ –Ω–∞–ø–∏—à–µ—Ç, –Ω–æ –≤–∞—Å –ø–æ–ø—Ä–∞–≤—è—Ç –∏ –ø–æ–¥—Å–∫–∞–∂—É—Ç.
–í—ã –¥–≤–∏–∂–µ—Ç–µ—Å—å , –ø–æ–∫–∞, –Ω–µ —Ç—É–¥–∞.
_________________
У того, кто делает — получается редко. У того, кто не делает — не получается никогда.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
rusman159
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 09:07:43 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –¥–µ–∫ 09, 2011 18:31:13
–°–æ–æ–±—â–µ–Ω–∏–π: 56
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 4
|
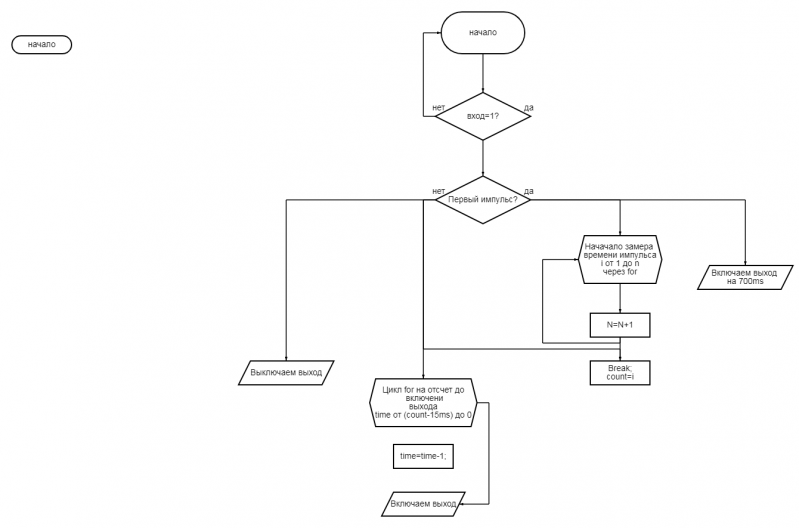
–Ø –¥–ª—è —Å–µ–±—è –ø–æ–Ω–∏–º–∞—é –ø—Ä–∏–º–µ—Ä–Ω—ã–π –∞–ª–≥–æ—Ä–∏—Ç–º —Ä–∞–±–æ—Ç—ã, –Ω–æ –ø–æ –∏–¥–µ–µ –Ω—É–∂–µ–Ω –æ—Ç–¥–µ–ª—å–Ω–æ —Ç–∞–π–º–µ—Ä –ª–∏–±–æ –æ—Ç–¥–µ–ª—å–Ω—ã–π –Ω–µ–∑–∞–≤–∏—Å–∏–º—ã–π –ø—Ä–æ—Ü–µ—Å—Å, –∫–æ—Ç–æ—Ä—ã–π –±—É–¥–µ—Ç —Å—á–∏—Ç–∞—Ç—å –≤—Ä–µ–º—è –º–µ–∂–¥—É –∏–º–ø—É–ª—å—Å–∞–º–∏, –∏ –æ—Ç–¥–µ–ª—å–Ω–æ –∫—É—Å–æ–∫ –ø—Ä–æ–≥—Ä–∞–º–º—ã –Ω–∞ –≤—Å—ë –æ—Å—Ç–∞–ª—å–Ω–æ–µ. –ö–æ–¥ –µ—Å—Ç–µ—Å—Ç–≤–µ–Ω–Ω–æ –±—É–¥—É –ø—Ä–æ–±–æ–≤–∞—Ç—å –ø–∏—Å–∞—Ç—å —Å–∞–º–æ—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ. –í –∞–ª–≥–æ—Ä–∏—Ç–º–µ –º–∞—Ä—Ç–∏–Ω–∞ –Ω–µ —Å–æ–≤—Å–µ–º –ø–æ–Ω—è–ª –ø—Ä–æ —Å–¥–≤–∏–≥ 1 –≤–ª–µ–≤–æ. –ü–æ–∑–∞–≤—á–µ—Ä–∞ –ø—Ä–æ–≤–æ–¥–∏–ª —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç—ã —Å —Ñ—É–Ω–∫—Ü–∏–µ–π __Delay, –ø—Ä–∏ –µ–µ —Ä–∞–±–æ—Ç–µ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä —Å—Ç–æ–∏—Ç –Ω–∞ –º–µ—Å—Ç–µ, –∂–¥–µ—Ç. –î–ª—è —Ç–µ—Å—Ç–∞ –∑–∞–º–µ–Ω–∏–ª –µ–µ –Ω–∞ —Ü–∏–∫–ª for –≥–¥–µ –ø—Ä–æ—Å—Ç–æ –±—ã–ª–æ N=N+1; –∏ –ø—Ä–æ–≤–µ—Ä–∫–∞ –Ω–∞–∂–∞—Ç–∏—è –∫–Ω–æ–ø–∫–∏, –ø–æ –∑–∞–º–µ—Ä–∞–º –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞—Ñ–æ–º 12500 —Å–ª–æ–∂–µ–Ω–∏–π=500ms, 250 —Å–ª–æ–∂–µ–Ω–∏–π=10ms. –ë—ã–ª–∞ –∏–¥–µ—è –ø–æ –ø—Ä–∏—Ö–æ–¥—É –∏–º–ø—É–ª—å—Å–∞ –∑–∞–ø—É—Å–∫–∞—Ç—å —Ü–∏–∫–ª for, –ø–æ –≤—Ç–æ—Ä–æ–º—É –ø—Ä–∏—Ö–æ–¥—É –æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ–º, —Ç–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º –±—É–¥–µ—Ç –∏–∑–≤–µ—Å—Ç–Ω–æ –≤—Ä–µ–º—è ( –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —Å–ª–æ–∂–µ–Ω–∏–π) –º–µ–∂–¥—É –∏–º–ø—É–ª—å—Å–∞–º–∏, –Ω–æ –≤–æ–∑–Ω–∏–∫–ª–∞ –ø—Ä–æ–±–ª–µ–º–∞, –Ω—É–∂–Ω–æ –∂–µ –ø–∞—Ä–∞–ª–ª–µ–ª—å–Ω–æ –∑–∞–ø—É—Å–∫–∞—Ç—å –µ—â–µ –æ–¥–∏–Ω —Ü–∏–∫–ª –ø–æ –ø—Ä–∏—Ö–æ–¥—É –∏–º–ø—É–ª—å—Å–∞ –Ω–∞ –≤—Ö–æ–¥, –∫–æ—Ç–æ—Ä—ã–π –±—É–¥–µ—Ç —Ä–∞–≤–µ–Ω –ø—Ä–æ—à–ª–æ–µ –≤—Ä–µ–º—è –º–∏–Ω—É—Å 15ms –∫ –ø—Ä–∏–º–µ—Ä—É, –∏ –æ–Ω –±—É–¥–µ—Ç –≤–∫–ª—é—á–∞—Ç—å –≤—ã—Ö–æ–¥. –ù–æ –ø–∞—Ä–∞–ª–ª–µ–ª—å–Ω–æ –¥–≤–∞ —Ü–∏–∫–ª–∞ —Ä–∞–±–æ—Ç–∞—Ç—å –Ω–µ —Å–º–æ–≥—É—Ç, –ª–∏–±–æ –Ω—É–∂–µ–Ω —Ü–∏–∫–ª –≤–Ω—É—Ç—Ä–∏ —Ü–∏–∫–ª–∞.  –î–æ–±–∞–≤–ª–µ–Ω–æ after 23 minutes 56 seconds: –î–æ–±–∞–≤–ª–µ–Ω–æ after 23 minutes 56 seconds:–ù–∞–±—Ä–æ—Å–∞–ª –±–ª–æ–∫ —Å—Ö–µ–º—É, –æ–Ω–∞ –Ω–µ —Å–æ–≤—Å–µ–º –ø–æ–ª–Ω–∞—è, —Ç—É—Ç —Å–∫–∞–∂–µ–º —Ç–∞–∫ –Ω–∞ –æ–¥–∏–Ω —Ü–∏–∫–ª —Ä–∞–±–æ—Ç—ã, –¥–∞–ª–µ–µ –≤—Å–µ –ø–æ –∫—Ä—É–≥—É 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
veso74
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 09:09:19 |
|
| –ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º |
–ö–∞—Ä–º–∞: 25
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 450
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:24:52
–°–æ–æ–±—â–µ–Ω–∏–π: 1642
–û—Ç–∫—É–¥–∞: KN34PC, –ë–æ–ª–≥–∞—Ä–∏—è
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Измерение временных характеристик сигналов одним таймером (и у которого нет interrupt при преполнения) - это своего рода "мазохизм" :П. Вариант: с помощью имеющегося таймера организовать "временное окно", в течение которого будете "замерять" входной сигнал. Но без interrupt в таймере метод опять полный беспорядок. Приходится постоянно "проверять", сколько времени прошло от предыдущего события или предыдущего сброса. С задержкой на чтение и вычитанием сравнения - метод снова бессмысленен. И это должно быть помещено в 25 байт SRAM  . Поменяйте МК на такой, у которого два таймера. Один: для отчета о времени, другой: для состояния входного сигнала – передний/задний фронт. А после анализа времени запускайте/останавливайте другие выходы по мере необходимости. (частично пользуюсь переводчиком)
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
rusman159
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 10:14:23 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –¥–µ–∫ 09, 2011 18:31:13
–°–æ–æ–±—â–µ–Ω–∏–π: 56
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–î—É–º–∞–ª –Ω–∞ –≤–∞—Ä–∏–∞–Ω—Ç–æ–º 12f629, —Ç–∞–º –±–æ–ª—å—à–µ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª, –Ω–æ –æ—Ä–∏–≥–∏–Ω–∞–ª—å–Ω—ã–π –≤–∞—Ä–∏–∞–Ω—Ç –≤—Ä–æ–¥–µ —Ä–∞–±–æ—Ç–∞–µ—Ç –Ω–∞ 12c(f)508 ( –Ω–æ —ç—Ç–æ –Ω–µ —Ç–æ—á–Ω–æ) , –ø–æ—ç—Ç–æ–º—É –∏–∑–Ω–∞—á–∞–ª—å–Ω–æ –∏ –ø–∞–ª –Ω–∞ –Ω–µ–≥–æ –≤—ã–±–æ—Ä
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
OKF
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 10:30:13 |
|
| –°–≤–µ—Ä–ª–∏—Ç —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç –∫–æ–≥—Ç—è–º–∏ |
–ö–∞—Ä–º–∞: 12
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 124
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∏—é–Ω 07, 2011 08:03:18
–°–æ–æ–±—â–µ–Ω–∏–π: 1232
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–î–ª—è —Ç–∞–∫–∏—Ö –∑–∞–¥–∞—á, –∑–∞—á–∞—Å—Ç—É—é, –¥–∞–∂–µ —Ç–∞–π–º–µ—Ä –Ω–µ –Ω—É–∂–µ–Ω.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
RoboC
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 11:24:15 |
|
| –ú—É–¥—Ä—ã–π –∫–æ—Ç |
|
–ö–∞—Ä–º–∞: 27
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 656
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–ø—Ä 04, 2012 09:55:53
–°–æ–æ–±—â–µ–Ω–∏–π: 1789
–û—Ç–∫—É–¥–∞: –°–µ–≤–µ—Ä–æ–¥–æ–Ω–µ—Ü–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
veso74 –ø–∏—Å–∞–ª(–∞): –í–∞—Ä–∏–∞–Ω—Ç: —Å –ø–æ–º–æ—â—å—é –∏–º–µ—é—â–µ–≥–æ—Å—è —Ç–∞–π–º–µ—Ä–∞ –æ—Ä–≥–∞–Ω–∏–∑–æ–≤–∞—Ç—å "–≤—Ä–µ–º–µ–Ω–Ω–æ–µ –æ–∫–Ω–æ", –≤ —Ç–µ—á–µ–Ω–∏–µ –∫–æ—Ç–æ—Ä–æ–≥–æ –±—É–¥–µ—Ç–µ "–∑–∞–º–µ—Ä—è—Ç—å" –≤—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª. –ù–µ –ø—É—Ç–∞–π—Ç–µ —á–µ–ª–æ–≤–µ–∫–∞ –°–ø–æ–π–ª–µ—Ä –¶–∏—Ç–∞—Ç–∞: –ü–æ–º–µ–Ω—è–π—Ç–µ –ú–ö –Ω–∞ —Ç–∞–∫–æ–π, —É –∫–æ—Ç–æ—Ä–æ–≥–æ –¥–≤–∞ —Ç–∞–π–º–µ—Ä–∞. –ê–≥–∞, –Ω–∞ stm32  (—Å–∞—Ä–∫–∞–∑–º)
_________________
У того, кто делает — получается редко. У того, кто не делает — не получается никогда.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Martian
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 12:07:38 |
|
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32
–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–Ω–µ —Å–æ–≤—Å–µ–º –ø–æ–Ω—è–ª –ø—Ä–æ —Å–¥–≤–∏–≥ 1 –≤–ª–µ–≤–æ. –Ø –Ω–∞–ø–∏—Å–∞–ª –≤–ª–µ–≤–æ?  –ø—Ä–æ—à—É –ø—Ä–æ—â–µ–Ω–∏—è, —ç—Ç–æ—Ç –æ—Ç –±–µ—Å—Å–æ–Ω–Ω–∏—Ü—ã. –í–ø—Ä–∞–≤–æ, –∫–æ–Ω–µ—á–Ω–æ –∂–µ. –≠–∫–≤–∏–≤–∞–ª–µ–Ω—Ç –¥–µ–ª–µ–Ω–∏—é –Ω–∞ –¥–≤–∞.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
RoboC
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 14:06:33 |
|
| –ú—É–¥—Ä—ã–π –∫–æ—Ç |
|
–ö–∞—Ä–º–∞: 27
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 656
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–ø—Ä 04, 2012 09:55:53
–°–æ–æ–±—â–µ–Ω–∏–π: 1789
–û—Ç–∫—É–¥–∞: –°–µ–≤–µ—Ä–æ–¥–æ–Ω–µ—Ü–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ï—Å–ª–∏ –≤—ã –ø–æ–¥–∞–µ—Ç–µ –Ω–∞ –≤—Ö–æ–¥ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ 1 , —á—Ç–æ —É –≤–∞—Å —Å –≤—ã—Ö–æ–¥–æ–º —Ç–≤–æ—Ä–∏—Ç—å—Å—è?
_________________
У того, кто делает — получается редко. У того, кто не делает — не получается никогда.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
rusman159
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 14:31:28 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –¥–µ–∫ 09, 2011 18:31:13
–°–æ–æ–±—â–µ–Ω–∏–π: 56
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ï—Å–ª–∏ 1 –Ω–∞ –≤—Ö–æ–¥–µ –ø–æ—Å—Ç–æ—è–Ω–Ω–∞—è, —Ç–æ –ø—Ä–æ—Å—Ç–æ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–µ—Ç –≤—ã—Ö–æ–¥ –Ω–∞ 760ms –∏ –≤—Å—ë. (–Ω–∞ —Ñ–æ—Ç–æ –∞ –Ω–∞—á–∞–ª–µ) 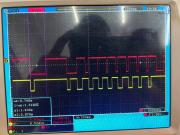 –ú–∞—Ä—Ç–∏–Ω, –∏–∑–≤–∏–Ω—è—é—Å—å, —è –æ—à–∏–±—Å—è, —É –í–∞—Å –∏ –±—ã–ª–æ —É–∫–∞–∑–∞–Ω–æ —Å–¥–≤–∏–≥ –≤–ø—Ä–∞–≤–æ (–Ω–µ–º–Ω–æ–≥–æ –Ω–µ–ø—Ä–∏–≤—ã—á–Ω–∞—è —Ñ–æ—Ä–º—É–ª–∏—Ä–æ–≤–∫–∞ –¥–ª—è –º–µ–Ω—è, –ø–æ—ç—Ç–æ–º—É —É—Ç–æ—á–Ω–∏–ª) –¥–µ–ª–µ–Ω–∏–µ –Ω–∞ 2 –∑–≤—É—á–∏—Ç –ø—Ä–æ—â–µ  –ù–æ –≤ –∏—Ç–æ–≥–µ —Ç–∞–∫ –∏ –æ—Å—Ç–∞–µ—Ç—Å—è –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å –∏–∑–º–µ—Ä–µ–Ω–∏—è –≤—Ä–µ–º–µ–Ω–∏ –º–µ–∂–¥—É –∏–º–ø—É–ª—å—Å–∞–º–∏ –Ω–∞ –≤—Ö–æ–¥–µ, –¥–ª—è –≤—ã—á–∏—Å–ª–µ–Ω–∏—è –≤—Ä–µ–º–µ–Ω–∏ –≤–∫–ª—é—á–µ–Ω–∏—è –≤—Ö–æ–¥–∞.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Martian
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 14:39:58 |
|
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32
–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–Ω–µ, –±—ã–ª–æ –≤–ª–µ–≤–æ, —è –ø–æ—Å–ª–µ –í–∞—à–µ–≥–æ –∑–∞–º–µ—á–∞–Ω–∏—è –∏—Å–ø—Ä–∞–≤–∏–ª.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
rusman159
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 14:40:32 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –¥–µ–∫ 09, 2011 18:31:13
–°–æ–æ–±—â–µ–Ω–∏–π: 56
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ø–æ –ø—Ä–∏—Ö–æ–¥—É –∏–º–ø—É–ª—å—Å–∞:
–∑–Ω–∞—á–µ–Ω–∏–µ —Å—á—ë—Ç—á–∏–∫–∞ —Å–æ—Ö—Ä–∞–Ω–∏—Ç—å –≤ –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é N —Å–æ —Å–¥–≤–∏–≥–æ–º –≤–ø—Ä–∞–≤–æ –Ω–∞ 1 (–¥–µ–ª–∏–º –Ω–∞ 2)
—Å–±—Ä–æ—Å–∏—Ç—å —Å—á—ë—Ç—á–∏–∫
–∏–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞—Ç—å –≤—ã—Ö–æ–¥
–∑–∞–ø—É—Å—Ç–∏—Ç—å —Ü–∏–∫–ª –¥–æ N. –ù–æ —Ç–æ–≥–¥–∞ –≤—ã—Ö–æ–¥ –±—É–¥–µ—Ç –≤–∫–ª—é—á–µ–Ω –≤—Å–µ –≤—Ä–µ–º—è –¥–æ –ø—Ä–∏—Ö–æ–¥–∞ –Ω–æ–≤–æ–≥–æ –∏–º–ø—É–ª—å—Å–∞, —Ä–∞–∑–≤–µ –Ω–µ—Ç? –ó–∞–¥–∞—á–∞ –∏–º–µ–Ω–Ω–æ –≤–∫–ª—é—á–∏—Ç—å –≤—ã—Ö–æ–¥ –Ω–µ–º–Ω–æ–≥–æ –∑–∞—Ä–∞–Ω–µ–µ ( 10-30ms) –ø–µ—Ä–µ–¥ –Ω–æ–≤—ã–º –∏–º–ø—É–ª—å—Å–æ–º
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Martian
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 14:46:24 |
|
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32
–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å –≤—ã—á–∏—Å–ª–µ–Ω–∏—è –≤—Ä–µ–º–µ–Ω–∏ –º–µ–∂–¥—É –¥–≤—É–º—è –∏–º–ø—É–ª—å—Å–∞–º–∏ –±—É–¥–µ—Ç –≤—Å–µ–≥–¥–∞, –ª–∏–±–æ –ø—Ä–∏–¥—ë—Ç—Å—è —Å—Ç—Ä–æ–∏—Ç—å –Ω–µ–≤–µ—Ä–æ—è—Ç–Ω–æ –æ–≥—Ä–æ–º–Ω—É—é –∏ –≤—Ä—è–¥ –ª–∏ –∑–¥–µ—Å—å –Ω—É–∂–Ω—É—é —Å–∏—Å—Ç–µ–º—É —Å–±–æ—Ä–∞ —Å—Ç–∞—Ç–∏—Å—Ç–∏–∫–∏ –∏ –ø—Ä–æ–≥–Ω–æ–∑–∏—Ä–æ–≤–∞–Ω–∏—è, –∫–æ—Ç–æ—Ä–∞—è –º–æ–∂–µ—Ç –æ–∫–∞–∑–∞—Ç—å —Å–æ–≤–µ—Ä—à–µ–Ω–Ω–æ –Ω–µ–¥–æ—Å—Ç–æ–≤–µ—Ä–Ω–æ–π, –µ—Å–ª–∏ –∏–∑–º–µ–Ω–µ–Ω–∏—è –∞–±—Å–æ–ª—é—Ç–Ω–æ —Å–ª—É—á–∞–π–Ω—ã. –¢–∞–∫ —á—Ç–æ, –≤—ã—Ö–æ–¥ –≤—Å–µ–≥–¥–∞ –±—É–¥–µ—Ç –æ—Ç—Å—Ç–∞–≤–∞—Ç—å –æ—Ç –≤—Ö–æ–¥–∞ –Ω–∞ –æ–¥–∏–Ω –ø–µ—Ä–∏–æ–¥. –î–æ–±–∞–≤–ª–µ–Ω–æ after 3 minutes 6 seconds:–ù–æ —Ç–æ–≥–¥–∞ –≤—ã—Ö–æ–¥ –±—É–¥–µ—Ç –≤–∫–ª—é—á–µ–Ω –≤—Å–µ –≤—Ä–µ–º—è –¥–æ –ø—Ä–∏—Ö–æ–¥–∞ –Ω–æ–≤–æ–≥–æ –∏–º–ø—É–ª—å—Å–∞, —Ä–∞–∑–≤–µ –Ω–µ—Ç? –ó–∞–¥–∞—á–∞ –∏–º–µ–Ω–Ω–æ –≤–∫–ª—é—á–∏—Ç—å –≤—ã—Ö–æ–¥ –Ω–µ–º–Ω–æ–≥–æ –∑–∞—Ä–∞–Ω–µ–µ ( 10-30ms) –ø–µ—Ä–µ–¥ –Ω–æ–≤—ã–º –∏–º–ø—É–ª—å—Å–æ–º –≠—Ç–æ –≤–æ–∑–º–æ–∂–Ω–æ —Ç–æ–ª—å–∫–æ –ø—Ä–∏ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ–π —á–∞—Å—Ç–æ—Ç–µ –Ω–∞ –≤—Ö–æ–¥–µ. –ï—Å–ª–∏ –ø–æ—Å—Ç–æ—è–Ω–Ω–∞ - —Ç–æ —Ç–æ–≥–¥–∞ –∏–∑–º–µ—Ä—è–µ–º –ø–µ—Ä–≤—ã–µ –Ω–µ—Å–∫–æ–ª—å–∫–æ –ø–µ—Ä–∏–æ–¥–æ–≤, —É–±–µ–∂–¥–∞–µ–º—Å—è, —á—Ç–æ –æ–Ω–∞ –ø–æ—Å—Ç–æ—è–Ω–Ω–∞, –Ω—É –∏ –¥–∞–ª—å—à–µ –∫–∞–∂–¥—ã–π –∏–º–ø—É–ª—å—Å –∑–∞–ø—É—Å–∫–∞–µ—Ç —Å—á—ë—Ç—á–∏–∫, —Ä–∞–≤–Ω—ã–π –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –º–∏–Ω—É—Å 10-30 –º—Å, –∏ –ø—Ä–æ–≤–µ—Ä—è–µ—Ç —ç—Ç–∏ 10-30 –º—Å –Ω–∞ —Å–ª–µ–¥—É—é—â–µ–º –∏–º–ø—É–ª—å—Å–µ. –ò —ç—Ç–æ –≤—Å—ë –º–æ–∂–Ω–æ –±–µ–∑ —Ç–∞–π–º–µ—Ä–∞, –ø—Ä–æ—Å—Ç–æ –∏–Ω–∫—Ä–µ–º–µ–Ω—Ç–∏—Ä–æ–≤–∞—Ç—å –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –∏ –∑–Ω–∞—Ç—å, —Å–∫–æ–ª—å–∫–æ –≤—Ä–µ–º–µ–Ω–∏ —ç—Ç–æ –∑–∞–Ω–∏–º–∞–µ—Ç. –ê –Ω–∞ –≥—Ä–∞—Ñ–∏–∫–µ –º–Ω–µ –ø–æ–∫–∞–∑–∞–ª–æ—Å—å /2
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
rusman159
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 14:48:37 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –¥–µ–∫ 09, 2011 18:31:13
–°–æ–æ–±—â–µ–Ω–∏–π: 56
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ó–∞–≤—Ç—Ä–∞ —Å–¥–µ–ª–∞—é –Ω–∞–ø—Ä–∏–º–µ—Ä –æ—Ç 0 –¥–æ 5-10–≥—Ü –∫–∞–∫ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –∫–æ—Ä—Ä–µ–∫—Ç–∏—Ä–æ–≤–∫–∞ –≤—Ä–µ–º–µ–Ω–∏ –≤—ã—Ö–æ–¥–∞
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Martian
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 15:00:04 |
|
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32
–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–Ω—É, –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏—è, —Å–∫–æ—Ä–æ—Å—Ç–∏ –∏ –¥–∏–∞–ø–∞–∑–æ–Ω–∞ –∏–∑–º–µ–Ω–µ–Ω–∏—è —á–∞—Å—Ç–æ—Ç—ã, –ø—Ä–∏ —Ç–∞–∫–æ–º –ø—Ä–æ—Å—Ç–æ–º –∞–ª–≥–æ—Ä–∏—Ç–º–µ, –±—É–¥–µ—Ç —Å–∏—Ç—É–∞—Ü–∏—è, –∫–æ–≥–¥–∞ –≤—ã—Ö–æ–¥–Ω–æ–π –∏–º–ø—É–ª—å—Å —Å–æ–≤–ø–∞–¥—ë—Ç —Å–æ –≤—Ö–æ–¥–Ω—ã–º, –∏ —Ç–æ, –µ—Å–ª–∏ —ç—Ç–æ –∑–∞—Å—Ç–∞–≤–∏—Ç—å –µ–≥–æ –¥–µ–ª–∞—Ç—å, –∏–Ω–∞—á–µ –æ–Ω –±—É–¥–µ—Ç –ø–æ–∑–∂–µ. –õ–∏–±–æ –ø–∏—Å–∞—Ç—å –∫–∞–∫–æ–π-—Ç–æ –∞–Ω–∞–ª–∏–∑, —á—Ç–æ –µ—Å–ª–∏ –¥–≤–∞ —Ä–∞–∑–∞ —á–∞—Å—Ç–æ—Ç–∞ –∏–∑–º–µ–Ω–∏–ª–∞—Å—å –Ω–∞ –∫–∞–∫—É—é-—Ç–æ –¥–µ–ª—å—Ç—É, –ø—Ä–∏–º–µ—Ä–Ω–æ —Ä–∞–≤–Ω—É—é, —Ç–æ –ø—Ä–µ–¥–ø–æ–ª–∞–≥–∞—Ç—å, —á—Ç–æ –∏ –≤ —Ç—Ä–µ—Ç–∏–π —Ä–∞–∑ –±—É–¥–µ—Ç. –≠—Ç–æ –æ—á–µ–Ω—å –∑–∞–ø–∞—Ä–Ω–æ, –Ω–∞ –º–æ–π –≤–∑–≥–ª—è–¥ –∏ –º–µ–Ω—è–µ—Ç –≤—Ä–µ–º—è –≤—ã—á–∏—Å–ª–µ–Ω–∏–π –Ω–µ–ø—Ä–æ–≥–Ω–æ–∑–∏—Ä—É–µ–º–æ, –ø—Ä–∏–¥—ë—Ç—Å—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ç–∞–π–º–µ—Ä.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
BOB51
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 15:12:23 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 96
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1472
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 16, 2010 22:02:27
–°–æ–æ–±—â–µ–Ω–∏–π: 15128
–û—Ç–∫—É–¥–∞: –î–û–ù–ï–¶–ö
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–Ø –≤–æ—Ç –Ω–µ –ø–æ–π–º—É... –ê –∑–∞—á–µ–º –ø–æ —Å—É—Ç–∏ –ø–æ–≤—Ç–æ—Ä–∏—Ç–µ–ª—é –∏–º–ø—É–ª—å—Å–æ–≤ –≤—Ä–µ–º–µ–Ω–Ω—ã–µ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ –∏–∑–º–µ—Ä—è—Ç—å - —Ç–æ? –ü–æ—Ö–æ–∂–µ rusman159 –ø–µ—Ä–µ–º—É–¥—Ä–∏–ª —Å –∑–∞–¥–∞—á–µ–π. –î–ª—è –Ω–∞—á–∞–ª–∞ —Å–ª–æ–≤–∞–º–∏ –æ–ø–∏—Å–∞—Ç—å "—á–µ–≥–æ —Ö–æ—á–µ—Ç—Å—è" –¥–∞ —Ä—É—á–∫–∞–º–∏ –≥—Ä–∞—Ñ–∏–∫ –∂–µ–ª–∞–µ–º–æ–≥–æ –Ω–∞—Ä–∏—Å–æ–≤–∞—Ç—å. –ê —Ç–∞–º –∏ –ø—Ä–æ—è—Å–Ω–∏—Ç—Å—è... –ò–Ω—Ç–µ—Ä–≤–∞–ª—ã –≤—Ä–µ–º–µ–Ω–∏ –Ω–µ —Ç–æ–ª—å–∫–æ —Ç–∞–π–º–µ—Ä–æ–º –æ–±–µ—Å–ø–µ—á–∏–≤–∞—é—Ç—Å—è. –í–æ–ø—Ä–æ—Å "–ø—Ä–µ–¥—Å–∫–∞–∑–∞–Ω–∏—è" –æ–∂–∏–¥–∞–µ–º–æ–≥–æ –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ –º–æ–∂–Ω–æ —Ä–µ—à–∞—Ç—å —Ç–æ–ª—å–∫–æ –ø—Ä–∏ –∑–∞—Ä–∞–Ω–µ–µ –∑–∞–¥–∞–Ω–Ω–æ–º –¥–∏–∞–ø–∞–∑–æ–Ω–µ –≤—Ö–æ–¥–Ω—ã—Ö –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ - –∏–Ω–∞—á–µ –¥–ª—è —Å—Ç–æ–ª—å –ø—Ä–æ—Å—Ç–æ–≥–æ –ú–ö —ç—Ç–æ –Ω–µ –∏–º–µ–µ—Ç —Ä–µ—à–µ–Ω–∏—è. –î–∞ –∏ –ø—Ä–æ–≥—Ä–∞–º–º—É –¥–ª—è —Ç–∞–∫–æ–π "–±—É–∫–∞—à–∫–∏" –ª—É—á—à–µ –ø–æ–¥ –∞—Å—Å–µ–º–±–ª–µ—Ä–æ–º –¥–µ–ª–∞—Ç—å. 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
rusman159
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 16:25:21 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –¥–µ–∫ 09, 2011 18:31:13
–°–æ–æ–±—â–µ–Ω–∏–π: 56
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
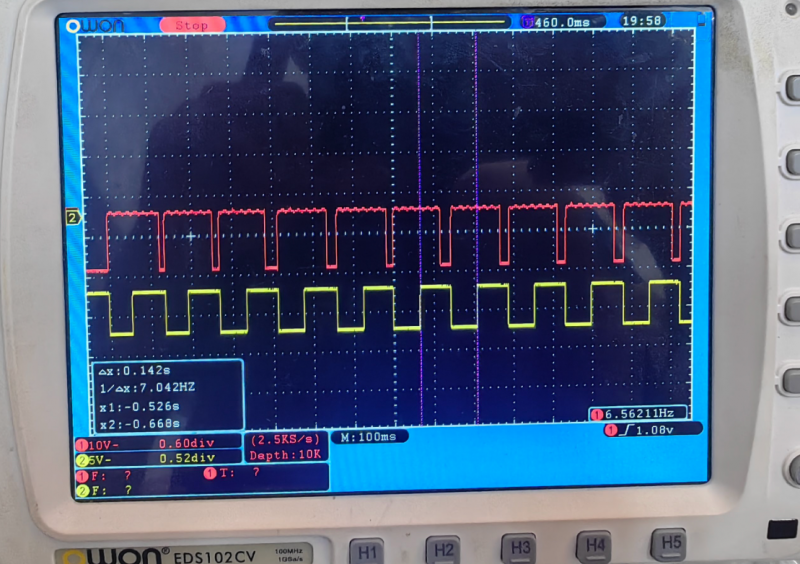
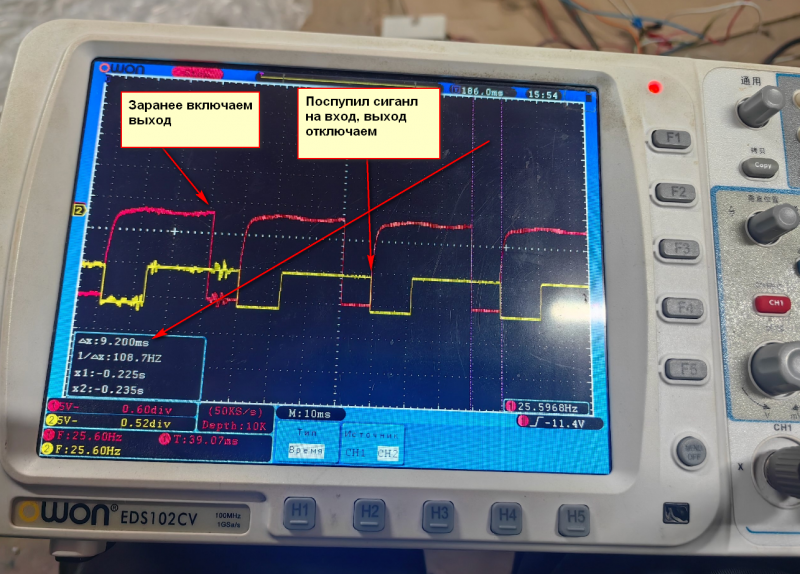
–ó–∞–¥–∞—á–∞ –ø—Ä–æ—Å—Ç–∞—è, –º–∫ –¥–æ–ª–∂–µ–Ω –æ–±–µ—Å–ø–µ—á–∏–≤–∞—Ç—å –º–∏–Ω–∏–º–∞–ª—å–Ω–æ –∫–æ—Ä–æ—Ç–∫–∏–π –∏–º–ø—É–ª—å—Å –Ω–∞ –≤—ã—Ö–æ–¥–µ –ø—Ä–∏ –ø–æ—Å—Ç—É–ø–ª–µ–Ω–∏–∏ —Å–∏–≥–Ω–∞–ª–∞ –Ω–∞ –≤—Ö–æ–¥. –ò —Å—Ç—Ä–µ–º–∏—Ç—Å—è –ø—Ä–∏ —Å—Ç–∞–±–∏–ª—å–Ω–æ–π —á–∞—Å—Ç–æ—Ç–µ –∫ –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–º—É –≤—Ä–µ–º–µ–Ω–∏ —Ä–∞–±–æ—Ç—ã –≤—ã—Ö–æ–¥–∞, –æ–∫–æ–ª–æ 10ms. –ü—Ä–∏ —ç—Ç–æ–º –≤–∫–ª—é—á–µ–Ω–∏–µ –≤—ã—Ö–æ–¥–∞ –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å –µ—â–µ –¥–æ –ø–æ—Å—Ç—É–ø–ª–µ–Ω–∏—è —Å–∏–≥–Ω–∞–ª–∞ –Ω–∞ –≤—Ö–æ–¥. –í–æ—Ç –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º—ã —Å –∏—Å—Ö–æ–¥–Ω–∏–∫–∞ –∏–∑ –ø–æ—Å—Ç–∞ –≤—ã—à–µ –°–∫–æ—Ä–µ–µ –≤—Å–µ–≥–æ –º–∫ –æ—Ä–∏–µ–Ω—Ç–∏—Ä—É–µ—Ç—Å—è –ø–æ –≤—Ä–µ–º–µ–Ω–∏ –º–µ–∂–¥—É –¥–≤—É–º—è –ø—Ä–æ—à–ª—ã–º–∏ –∏–º–ø—É–ª—å—Å–∞–º–∏ –∏ –∏—Å—Ö–æ–¥—è –∏–∑ —ç—Ç–æ–≥–æ –≤—Ä–µ–º–µ–Ω–∏ –∑–∞—Ä–∞–Ω–µ–µ –≤–∫–ª—é—á–∞–µ—Ç –≤—ã—Ö–æ–¥, —á—Ç–æ–±—ã –Ω–∞ –º–æ–º–µ–Ω—Ç –ø–æ—Å—Ç—É–ø–ª–µ–Ω–∏—è —Å–∏–≥–Ω–∞–ª–∞ –Ω–∞ –≤—Ö–æ–¥ –≤—Ä–µ–º—è —Ä–∞–±–æ—Ç—ã –≤—ã—Ö–æ–¥–∞ —Å–æ—Å—Ç–∞–≤–∏–ª–æ –æ–∫–æ–ª–æ 10–º—Å ( –≤ –∏–¥–µ–∞–ª–µ), –∑–∞–≤—Ç—Ä–∞ —Å–¥–µ–ª–∞—é –∑–∞–º–µ—Ä, –µ—Å—Ç—å –ª–∏ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç—å –≤—Ä–µ–º–µ–Ω–∏ –≤—ã—Ö–æ–¥–∞ –æ—Ç —á–∞—Å—Ç–æ—Ç—ã. –¢—É—Ç —è –≤—Ä—É—á–Ω—É—é –∂–∞–ª –Ω–∞ –∫–Ω–æ–ø–∫—É, –ø–æ—ç—Ç–æ–º—É –ø–µ—Ä–∏–æ–¥—ã —Ä–∞–∑–Ω—ã–µ, –Ω–æ –º–∫ +- –ø–æ–¥–≥–æ–Ω—è–µ—Ç —Ä–∞–±–æ—Ç—ã –≤—ã—Ö–æ–¥–∞ –ø–æ–¥ –Ω—É–∂–Ω—ã–π –∏–Ω—Ç–µ—Ä–≤–∞–ª.  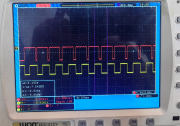 –í–æ—Ç –ø—Ä–∏–º–µ—Ä —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Å—Ç–∞–±–∏–ª—å–Ω–æ–π —á–∞—Å—Ç–æ—Ç–µ 25hz, —á–∞—Å—Ç–æ—Ç–∞ –º–æ–∂–µ—Ç –ø–ª–∞–≤–Ω–æ –º–µ–Ω—è—Ç—å—Å—è –æ—Ç 0 –¥–æ 300hz –∏ –æ–±—Ä–∞—Ç–Ω–æ 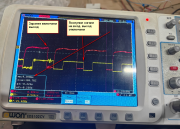
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Martian
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 16:43:56 |
|
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32
–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–Ω—É, –ø–æ–Ω—è—Ç–∏–µ "–ø–ª–∞–≤–Ω–æ" –Ω–µ –æ—á–µ–Ω—å –∏–Ω—Ñ–æ—Ä–º–∞—Ç–∏–≤–Ω–æ... –Ω—É–∂–Ω–æ –æ–ø–∏—Å—ã–≤–∞—Ç—å —Å–∫–æ—Ä–æ—Å—Ç—å –∏–∑–º–µ–Ω–µ–Ω–∏—è –º–∞—Ç–µ–º–∞—Ç–∏—á–µ—Å–∫–∏, –µ—Å–ª–∏ —ç—Ç–æ –≤–æ–æ–±—â–µ –≤–æ–∑–º–æ–∂–Ω–æ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
RoboC
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 16:50:24 |
|
| –ú—É–¥—Ä—ã–π –∫–æ—Ç |
|
–ö–∞—Ä–º–∞: 27
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 656
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–ø—Ä 04, 2012 09:55:53
–°–æ–æ–±—â–µ–Ω–∏–π: 1789
–û—Ç–∫—É–¥–∞: –°–µ–≤–µ—Ä–æ–¥–æ–Ω–µ—Ü–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
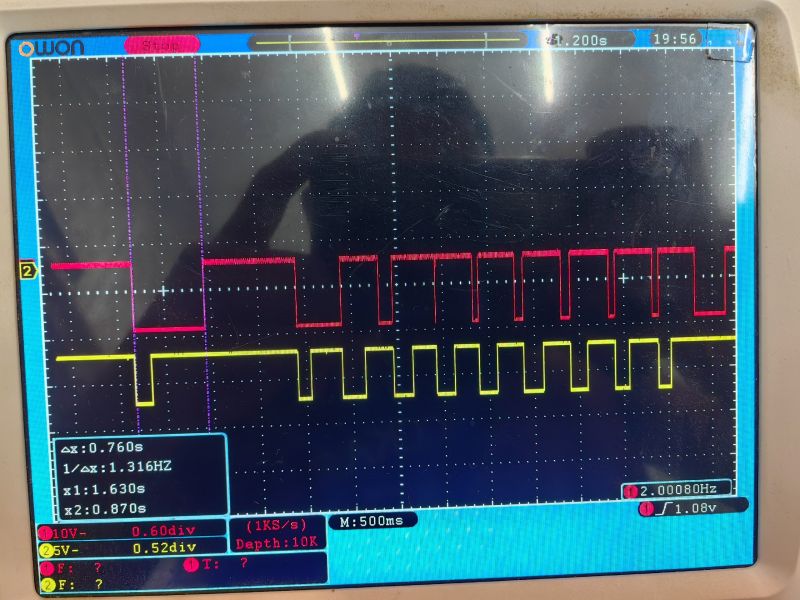 –í —Å–µ—Ä–µ–¥–∏–Ω–µ –≤–∏–¥–Ω–æ , —á—Ç–æ –Ω–∏–∫–∞–∫–∏—Ö —Ç–∞–º –ø—Ä–µ–¥—Å–∫–∞–∑–∞–Ω–∏–π –∏ 10–º—Å –Ω–µ—Ç. –°–∫–æ—Ä–µ–µ –≤—Å–µ–≥–æ –ü–ò–î. –Ý–µ–≥—É–ª–∏—Ä—É—é—â–∏–π –∏–º–ø—É–ª—å—Å –º–∞–∫—Å 760–º—Å –º–∏–Ω 0 –ü–ï—Ä–µ—Å—á–µ—Ç –ü–ò–î –ª–∏–±–æ –ø–æ —Ç–∞–π–º–µ—Ä—É –∏/–∏–ª–∏ –ø–æ –Ω–∏—Å–ø–∞–¥–∞—é—â–µ–º—É —Ñ—Ä–æ–Ω—Ç—É. –ø–æ–≤—Ç–æ—Ä—é –≤–æ–ø—Ä–æ—Å –ø—Ä–∏ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ–π 1 –Ω–∞ –≤—Ö–æ–¥–µ –Ω–∞ –≤—ã—Ö–æ–¥–µ —Å–∏–≥–Ω–∞–ª –ø–µ—Ä–µ–æ–¥–∏—á–µ—Å–∫–∏–π –∏–ª–∏ –µ–¥–∏–Ω–∏—á–Ω—ã–π? –ï—Å–ª–∏ –µ–¥–∏–Ω–∏—á–Ω—ã–π, —Ç–æ —Ç–æ–ª—å–∫–æ –ø–æ —Ñ—Ä–æ–Ω—Ç—É, –ø–µ—Ä–µ–æ–¥–∏—á–µ—Å–∫–∏–π = —Ñ—Ä–æ–Ω—Ç+ —Ç–∞–π–º–µ—Ä. –ù–∞ —Ñ–æ—Ç–æ –≤–∏–¥–Ω–æ –∏ –∫–æ–ª–µ–±–∞–Ω–∏—è –∏ –ø–µ—Ä–µ—Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞–Ω–∏–µ.
_________________
У того, кто делает — получается редко. У того, кто не делает — не получается никогда.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
BOB51
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: PIC12f508 –ò–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–∏–≥–Ω–∞–ª–æ–≤ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –æ–∫—Ç 17, 2024 17:27:10 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 96
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1472
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 16, 2010 22:02:27
–°–æ–æ–±—â–µ–Ω–∏–π: 15128
–û—Ç–∫—É–¥–∞: –î–û–ù–ï–¶–ö
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ó–∞–¥–∞—á–∫–∞ –ø—Ä–µ–¥—Å–∫–∞–∑–∞–Ω–∏—è –¥–ª—è –¥–∞—Ç—á–∏–∫–∞ –ø–æ–ª–æ–∂–µ–Ω–∏—è –ª–µ–Ω—Ç—ã –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –Ω–∞–≥—Ä–µ–≤–∞—Ç–µ–ª—å–Ω—ã—Ö –Ω–æ–∂–µ–π —Ñ–∞—Å–æ–≤–æ—á–Ω–æ–≥–æ –∞–≤—Ç–æ–º–∞—Ç–∞? –®—Ç—É–∫–∞ –≤–µ—Å—å–º–∞ –Ω–µ–±–ª–∞–≥–æ–¥–∞—Ä–Ω–∞—è –∏ —Å–∞–º–∏–º –ú–ö –Ω–∏—á–µ–≥–æ –æ—Å–æ–±–æ –Ω–µ –º–µ–Ω—è—é—â–∞—è, –µ—Å–ª–∏ –º–µ—Ö–∞–Ω–∏–∫–∞ —É–∂–µ —Å–≤–æ–π —Å—Ä–æ–∫ –æ—Ç—Ä–∞–±–æ—Ç–∞–ª–∞... 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 2 –∏–∑ 3
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 48 ] |
, , |
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ |
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 71 |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|
|
|