


| –§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç https://radiokot.ru/forum/ |
|
| –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ https://radiokot.ru/forum/viewtopic.php?f=2&t=175155 |
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 16 |
| –ê–≤—Ç–æ—Ä: | *Trigger* [ –í—Å —è–Ω–≤ 24, 2021 00:04:36 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–ü—Ä–∏–≤–µ—Ç—Å—Ç–≤—É—é –≤—Å–µ—Ö –∑–∞–≥–ª—è–Ω—É–≤—à–∏—Ö —Å—é–¥–∞! –•–æ—Ç–µ–ª –±—ã –ø–æ–¥–µ–ª–∏—Ç—å—Å—è –ø—Ä–æ–µ–∫—Ç–æ–º –ø–æ–ª–Ω–æ—Ü–µ–Ω–Ω–æ–≥–æ –Ω–∞–º–æ—Ç–æ—á–Ω–æ–≥–æ —Å—Ç–∞–Ω–∫–∞ —Å –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–æ–π —É–∫–ª–∞–¥–∫–æ–π –ø—Ä–æ–≤–æ–¥–∞. –°–Ω–∞—á–∞–ª–∞ –Ω–µ–±–æ–ª—å—à–∞—è –ø—Ä–µ–¥—ã—Å—Ç–æ—Ä–∏—è. –≠—Ç–æ—Ç –ø—Ä–æ–µ–∫—Ç —Å–æ–∑–¥–∞–≤–∞–ª—Å—è –ø–æ –ø—Ä–æ—Å—å–±–µ –º–æ–µ–≥–æ —Ö–æ—Ä–æ—à–µ–≥–æ –∑–Ω–∞–∫–æ–º–æ–≥–æ –Ø–Ω–∞ (–∑–¥–µ—Å—å –æ–Ω –ø—Ä–∏—Å—É—Ç—Å—Ç–≤—É–µ—Ç –ø–æ–¥ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–º –Ω–∏–∫–æ–º). –û–Ω –Ω–∞—à—ë–ª –∏ –ø–æ–≤—Ç–æ—Ä–∏–ª –≤–æ—Ç —ç—Ç—É –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏—é, –Ω–æ, –∫–∞–∫ –æ–∫–∞–∑–∞–ª–æ—Å—å, —Ä–∞–±–æ—Ç–∞–µ—Ç –æ–Ω–∞ –æ—á–µ–Ω—å –ø–ª–æ—Ö–æ. –ü–æ–ª—É—á–∏—Ç—å –Ω—É–∂–Ω—ã–π —à–∞–≥ –Ω–∞–º–æ—Ç–∫–∏ –∑–∞—Ç—Ä—É–¥–Ω–∏—Ç–µ–ª—å–Ω–æ, —Ä–µ–∞–ª—å–Ω–æ–µ –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏–µ —É–∫–ª–∞–¥—á–∏–∫–∞ –∑–∞ –æ–¥–∏–Ω –æ–±–æ—Ä–æ—Ç –≤–∞–ª–∞ —Å –∫–∞—Ä–∫–∞—Å–æ–º –Ω–µ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω–æ–º—É –∑–Ω–∞—á–µ–Ω–∏—é. –¢–∞–∫–∂–µ –≤ —ç—Ç–æ–π –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏ –¥–ª—è —ç–∫–æ–Ω–æ–º–∏–∏ –≤—ã–≤–æ–¥–æ–≤ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–æ –ø–æ–¥–∫–ª—é—á–µ–Ω–∏–µ –∫–Ω–æ–ø–æ–∫ –∫ –ê–¶–ü, –∏ –∏–∑-–∑–∞ –Ω–µ–¥–æ—Ä–∞–±–æ—Ç–∞–Ω–Ω–æ–π –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ–π —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ –æ–ø—Ä–æ—Å–∞ –∫–Ω–æ–ø–æ–∫ –ø–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–∏ –≤–æ–∑–Ω–∏–∫–∞—é—Ç –≥–ª—é–∫–∏ - —Å—Ä–∞–±–∞—Ç—ã–≤–∞–µ—Ç –Ω–µ —Ç–∞ –∫–Ω–æ–ø–∫–∞, –∫–æ—Ç–æ—Ä–∞—è –¥–æ–ª–∂–Ω–∞. –ò —ç—Ç–∏ –ø—Ä–æ–±–ª–µ–º—ã –ø–æ—è–≤–∏–ª–∏—Å—å —É –º–Ω–æ–≥–∏—Ö, –∫—Ç–æ –ø–æ–≤—Ç–æ—Ä–∏–ª –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏—é, –∫–∞–∫ —Å–ª–µ–¥—É–µ—Ç –∏–∑ —Ç–µ–º—ã —Å –æ–±—Å—É–∂–¥–µ–Ω–∏–µ–º. –ü–æ—Å–∫–æ–ª—å–∫—É –º–µ—Ö–∞–Ω–∏–∫–∞ –Ω–∞–º–æ—Ç–æ—á–Ω–æ–≥–æ —Å—Ç–∞–Ω–∫–∞ –±—ã–ª–∞ —É–∂–µ –≥–æ—Ç–æ–≤–∞, –ø—Ä–æ–µ–∫—Ç –Ω—É–∂–Ω–æ –±—ã–ª–æ –∑–∞–≤–µ—Ä—à–∏—Ç—å. –Ø –ø–æ—Å–º–æ—Ç—Ä–µ–ª –æ—Ä–∏–≥–∏–Ω–∞–ª—å–Ω—É—é –ø—Ä–æ–≥—Ä–∞–º–º—É –¥–ª—è –ê—Ä–¥—É–∏–Ω–æ, –∏ –ø–æ–Ω—è–ª, —á—Ç–æ –ø—Ä–æ—â–µ —Å–¥–µ–ª–∞—Ç—å –≤—Å—ë —Å –Ω—É–ª—è, –∞ –Ω–µ –ø—ã—Ç–∞—Ç—å—Å—è –∏—Å–ø—Ä–∞–≤–∏—Ç—å –∏–º–µ—é—â–µ–µ—Å—è. –ú–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∞—è —á–∞—Å—Ç—å —Å–æ–¥–µ—Ä–∂–∏—Ç –¥–≤–∞ —à–∞–≥–æ–≤—ã—Ö –¥–≤–∏–≥–∞—Ç–µ–ª—è: –æ–¥–∏–Ω –≤—Ä–∞—â–∞–µ—Ç –≤–∞–ª, –Ω–∞ –∫–æ—Ç–æ—Ä—ã–π –∫—Ä–µ–ø–∏—Ç—Å—è –∫–∞—Ä–∫–∞—Å –Ω–∞–º–∞—Ç—ã–≤–∞–µ–º–æ–π –∫–∞—Ç—É—à–∫–∏, –∞ –≤—Ç–æ—Ä–æ–π –ø–æ—Å—Ä–µ–¥—Å—Ç–≤–æ–º —Ö–æ–¥–æ–≤–æ–≥–æ –≤–∏–Ω—Ç–∞ –ø—Ä–∏–≤–æ–¥–∏—Ç –≤ –¥–≤–∏–∂–µ–Ω–∏–µ —É–∫–ª–∞–¥—á–∏–∫ –ø—Ä–æ–≤–æ–¥–∞ - –º–µ—Ö–∞–Ω–∏–∑–º, –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–π –ø—Ä–æ–≤–æ–¥ –≤ –Ω—É–∂–Ω—É—é —Ç–æ—á–∫—É –∫–∞—Ä–∫–∞—Å–∞. –£–ø—Ä–∞–≤–ª—è–µ—Ç —ç—Ç–∏–º–∏ –¥–≤—É–º—è –¥–≤–∏–≥–∞—Ç–µ–ª—è–º–∏ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä ATmega8A. –°—Ö–µ–º–∞ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞: 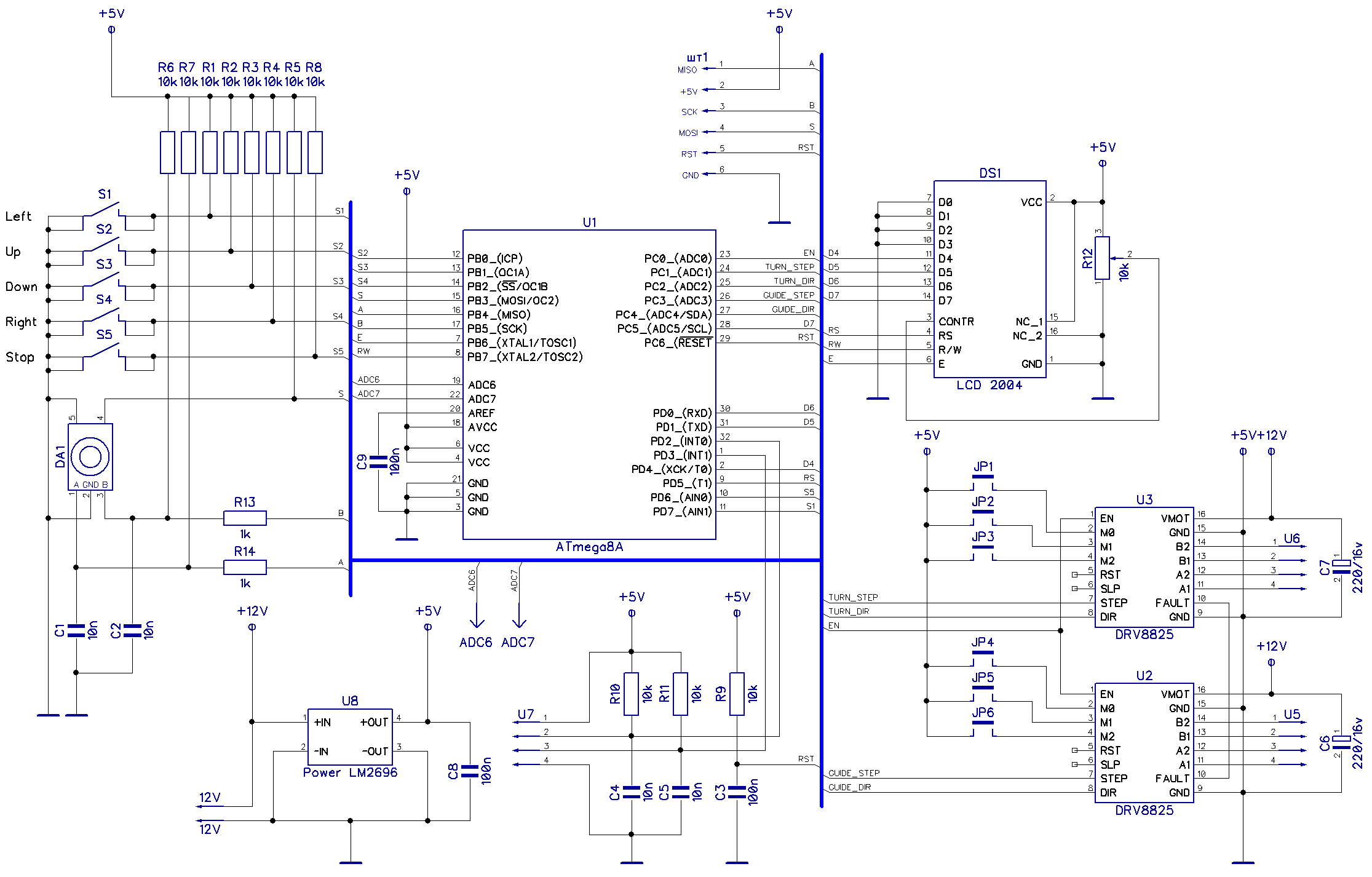 –®–∞–≥–æ–≤—ã–µ –¥–≤–∏–≥–∞—Ç–µ–ª–∏ —É–ø—Ä–∞–≤–ª—è—é—Ç—Å—è –ø—Ä–∏ –ø–æ–º–æ—â–∏ –≥–æ—Ç–æ–≤—ã—Ö –∫–∏—Ç–∞–π—Å–∫–∏—Ö –ø–ª–∞—Ç–æ–∫ –¥—Ä–∞–π–≤–µ—Ä–æ–≤ (–≤ –¥–∞–Ω–Ω–æ–º —Å–ª—É—á–∞–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω—ã DRV8825, –Ω–æ –º–æ–∂–Ω–æ –ø–æ—Å—Ç–∞–≤–∏—Ç—å –∏ –ª—é–±—ã–µ –¥—Ä—É–≥–∏–µ). –î—Ä–∞–π–≤–µ—Ä U3 —É–ø—Ä–∞–≤–ª—è–µ—Ç –¥–≤–∏–≥–∞—Ç–µ–ª–µ–º –Ω–∞–º–æ—Ç–∫–∏, –∞ U2 - –¥–≤–∏–≥–∞—Ç–µ–ª–µ–º —É–∫–ª–∞–¥—á–∏–∫–∞. –î–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω–æ –ø—Ä–µ–¥—É—Å–º–æ—Ç—Ä–µ–Ω–∞ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –ø–æ–¥–∫–ª—é—á–µ–Ω–∏—è —ç–Ω–∫–æ–¥–µ—Ä–∞, —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω–æ–≥–æ –Ω–∞ –≤–∞–ª—É –¥–≤–∏–≥–∞—Ç–µ–ª—è –Ω–∞–º–æ—Ç–∫–∏ (—Ä–∞–∑—ä—ë–º U7), –æ–¥–Ω–∞–∫–æ, –≤ –Ω–∞—Å—Ç–æ—è—â–∏–π –º–æ–º–µ–Ω—Ç –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ–π –ø–æ–¥–¥–µ—Ä–∂–∫–∏ —ç—Ç–æ–≥–æ —É–∑–ª–∞ –Ω–µ—Ç. –û—Ä–≥–∞–Ω—ã —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ–º –æ—Å—Ç–∞–ª–∏—Å—å —Ç–∞–∫–∏–µ –∂–µ, –∫–∞–∫ –∏ –≤ –æ—Ä–∏–≥–∏–Ω–∞–ª—å–Ω–æ–π –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏: —ç–Ω–∫–æ–¥–µ—Ä (—Å –∫–Ω–æ–ø–∫–æ–π) –∏ –µ—â—ë –ø—è—Ç—å –∫–Ω–æ–ø–æ–∫. –ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –≤—ã–≤–æ–¥–∏—Ç—Å—è –Ω–∞ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä 2004 (20 —Å–∏–º–≤–æ–ª–æ–≤, 4 —Å—Ç—Ä–æ–∫–∏) —Å –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º, —Å–æ–≤–º–µ—Å—Ç–∏–º—ã–º —Å HD44780. –î–ª—è —É—Å—Ç–∞–Ω–æ–≤–∫–∏ –≤—Å–µ—Ö –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ –Ω–∞–º–æ—Ç–∫–∏ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è —ç–Ω–∫–æ–¥–µ—Ä, —Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω–æ –ø—Ä–æ—Å—Ç–µ–π—à–µ–µ –º–µ–Ω—é. –°–Ω–∞—á–∞–ª–∞ –ø–æ–≤–æ—Ä–æ—Ç–æ–º —ç–Ω–∫–æ–¥–µ—Ä–∞ –≤—ã–±–∏—Ä–∞–µ—Ç—Å—è —Ç—Ä–µ–±—É–µ–º—ã–π –ø–∞—Ä–∞–º–µ—Ç—Ä (–ø—É–Ω–∫—Ç –º–µ–Ω—é). –ö—É—Ä—Å–æ—Ä –≤ –≤–∏–¥–µ —Å–∏–º–≤–æ–ª–∞ ">" —É–∫–∞–∑—ã–≤–∞–µ—Ç –Ω–∞ –≤—ã–±—Ä–∞–Ω–Ω—ã–π –ø—É–Ω–∫—Ç –º–µ–Ω—é. 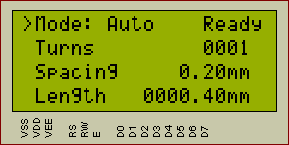 –î–ª—è –≤—Ö–æ–¥–∞ –≤ —Ä–µ–∂–∏–º —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ø–∞—Ä–∞–º–µ—Ç—Ä–∞ –Ω—É–∂–Ω–æ –Ω–∞–∂–∞—Ç—å –∫–Ω–æ–ø–∫—É —ç–Ω–∫–æ–¥–µ—Ä–∞ (–Ω–∞–∑–æ–≤—ë–º –µ—ë –∫–Ω–æ–ø–∫–æ–π OK). –ø—Ä–∏ —ç—Ç–æ–º –≤–æ–∫—Ä—É–≥ –∑–Ω–∞—á–µ–Ω–∏—è –ø–∞—Ä–∞–º–µ—Ç—Ä–∞ –ø–æ—è–≤—è—Ç—Å—è —Å–∏–º–≤–æ–ª—ã ">" –∏ "<". –î–∞–ª–µ–µ –≤—Ä–∞—â–µ–Ω–∏–µ–º —ç–Ω–∫–æ–¥–µ—Ä–∞ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç—Å—è –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ. –ü—Ä–∏ –Ω–∞–∂–∞—Ç–∏–∏ –∫–Ω–æ–ø–∫–∏ OK —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ —Å–Ω–æ–≤–∞ –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç –≤ —Ä–µ–∂–∏–º –≤—ã–±–æ—Ä–∞ –ø–∞—Ä–∞–º–µ—Ç—Ä–∞. –ß–∏—Å–ª–æ–≤—ã–µ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã —Å –±–æ–ª—å—à–∏–º —á–∏—Å–ª–æ–º —Ä–∞–∑—Ä—è–¥–æ–≤ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é—Ç—Å—è –ø–æ—Ä–∞–∑—Ä—è–¥–Ω–æ. –ü–µ—Ä–µ—Ö–æ–¥ –∫ —Å–ª–µ–¥—É—é—â–µ–º—É —Ä–∞–∑—Ä—è–¥—É –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è –∫–Ω–æ–ø–∫–æ–π OK. –ò–∑–º–µ–Ω—è–µ–º—ã–π –≤ –¥–∞–Ω–Ω—ã–π –º–æ–º–µ–Ω—Ç —Ä–∞–∑—Ä—è–¥ —Ä–∞–∑—Ä—è–¥ –º–∏–≥–∞–µ—Ç, –ø—Ä–∏ –ø–æ–≤–æ—Ä–æ—Ç–µ —ç–Ω–∫–æ–¥–µ—Ä–∞ –º–∏–≥–∞–Ω–∏–µ –≤—Ä–µ–º–µ–Ω–Ω–æ –ø—Ä–∏–æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç—Å—è. 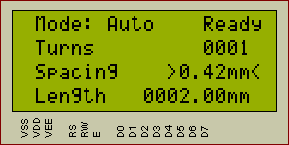 –ù–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ –∏–º–µ–µ—Ç –¥–≤–∞ —Ä–µ–∂–∏–º–∞ —Ä–∞–±–æ—Ç—ã: –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π (Auto) –∏ —Ä—É—á–Ω–æ–π (Manual). –Ý–µ–∂–∏–º –≤—ã–±–∏—Ä–∞–µ—Ç—Å—è –≤ –ø—É–Ω–∫—Ç–µ –º–µ–Ω—é Mode. –í –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–æ–º —Ä–µ–∂–∏–º–µ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é—Ç—Å—è —Å–ª–µ–¥—É—é—â–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã: 1. Turns - —á–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤; 2. Spacing - —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ –º–µ–∂–¥—É –≤–∏—Ç–∫–∞–º–∏, —Ç.–µ. —à–∞–≥ –Ω–∞–º–æ—Ç–∫–∏ (–≤–µ–ª–∏—á–∏–Ω–∞ —Å–º–µ—â–µ–Ω–∏—è —É–∫–ª–∞–¥—á–∏–∫–∞ –∑–∞ –æ–¥–∏–Ω –æ–±–æ—Ä–æ—Ç –∫–∞—Ç—É—à–∫–∏), –º–º; 3. Length - –¥–ª–∏–Ω–∞ –Ω–∞–º–æ—Ç–∫–∏, –º–º; 4. Turns/layer - —á–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤ –≤ —Å–ª–æ–µ; 5. Speed - —Å–∫–æ—Ä–æ—Å—Ç—å –Ω–∞–º–æ—Ç–∫–∏, –æ–±./—Å; 6. Direction - –Ω–∞—á–∞–ª—å–Ω–æ–µ –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –¥–≤–∏–∂–µ–Ω–∏—è —É–∫–ª–∞–¥—á–∏–∫–∞ (–Ω–∞ –ø–µ—Ä–≤–æ–º —Å–ª–æ–µ); 7. Pause - –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∞—è –ø—Ä–∏–æ—Å—Ç–∞–Ω–æ–≤–∫–∞ –Ω–∞–º–æ—Ç–∫–∏ –≤ –∫–æ–Ω—Ü–µ –∫–∞–∂–¥–æ–≥–æ —Å–ª–æ—è (–Ω–∞–ø—Ä–∏–º–µ—Ä, –¥–ª—è –ø—Ä–æ–∫–ª–∞–¥–∫–∏ –º–µ–∂—Å–ª–æ–π–Ω–æ–π –∏–∑–æ–ª—è—Ü–∏–∏). –î–ª—è –∑–∞–ø—É—Å–∫–∞ –Ω–∞–º–æ—Ç–∫–∏ –Ω—É–∂–Ω–æ –Ω–∞–∂–∞—Ç—å –∏ —É–¥–µ—Ä–∂–∏–≤–∞—Ç—å –≤ —Ç–µ—á–µ–Ω–∏–µ –æ–¥–Ω–æ–π —Å–µ–∫—É–Ω–¥—ã –∫–Ω–æ–ø–∫—É OK. –ù–∞–º–æ—Ç–∫–∞ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –ø–æ—Å–ª–æ–π–Ω–æ —Å –∏–∑–º–µ–Ω–µ–Ω–∏–µ–º –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏—è –º–µ–∂–¥—É —Å–ª–æ—è–º–∏. –í –∫–æ–Ω—Ü–µ –∫–∞–∂–¥–æ–≥–æ —Å–ª–æ—è —Å—Ç–∞–Ω–æ–∫ –æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç—Å—è, –µ—Å–ª–∏ –≤ –ø—É–Ω–∫—Ç–µ –º–µ–Ω—é Pause –≤—ã–±—Ä–∞–Ω–æ On. –¢–∞–∫–∂–µ –ø–æ—Å—Ç–∞–≤–∏—Ç—å –Ω–∞–º–æ—Ç–∫—É –Ω–∞ –ø–∞—É–∑—É –º–æ–∂–Ω–æ –≤ –ª—é–±–æ–π –º–æ–º–µ–Ω—Ç, –Ω–∞–∂–∞–≤ –∫–Ω–æ–ø–∫—É OK. –î–ª—è –≤–æ–∑–æ–±–Ω–æ–≤–ª–µ–Ω–∏—è –ø—Ä–æ—Ü–µ—Å—Å–∞ –Ω–∞–º–æ—Ç–∫–∏ –Ω—É–∂–Ω–æ —Ç–∞–∫–∂–µ –Ω–∞–∂–∞—Ç—å OK. –¢–µ–∫—É—â–µ–µ —Å–æ—Å—Ç–æ—è–Ω–∏–µ –æ—Ç–æ–±—Ä–∞–∂–∞–µ—Ç—Å—è –≤ –ø—Ä–∞–≤–æ–º –≤–µ—Ä—Ö–Ω–µ–º —É–≥–ª—É –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä–∞: Ready - —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ –≥–æ—Ç–æ–≤–æ –∫ –∑–∞–ø—É—Å–∫—É; Running - –Ω–∞–º–æ—Ç–∫–∞ –∑–∞–ø—É—â–µ–Ω–∞; Paused - –Ω–∞–º–æ—Ç–∫–∞ –ø—Ä–∏–æ—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–∞; Done - –Ω–∞–º–æ—Ç–∫–∞ –∑–∞–≤–µ—Ä—à–µ–Ω–∞. 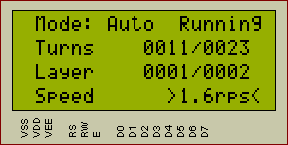 –í –ø—Ä–æ—Ü–µ—Å—Å–µ –Ω–∞–º–æ—Ç–∫–∏, –∞ —Ç–∞–∫–∂–µ –≤ —Ä–µ–∂–∏–º–µ –ø–∞—É–∑—ã, –º–æ–∂–Ω–æ –∏–∑–º–µ–Ω—è—Ç—å —Å–∫–æ—Ä–æ—Å—Ç—å –≤—Ä–∞—â–µ–Ω–∏–µ–º —ç–Ω–∫–æ–¥–µ—Ä–∞. –ö–Ω–æ–ø–∫–∞ Stop –º–≥–Ω–æ–≤–µ–Ω–Ω–æ –æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç –Ω–∞–º–æ—Ç–∫—É, —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç –≤ –º–µ–Ω—é. –ù–∞–ª–∏—á–∏–µ –≤ –º–µ–Ω—é –æ–¥–Ω–æ–≤—Ä–µ–º–µ–Ω–Ω–æ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ Length –∏ Turns/layer —Ç—Ä–µ–±—É–µ—Ç –ø–æ—è—Å–Ω–µ–Ω–∏—è. –û—á–µ–≤–∏–¥–Ω–æ, —ç—Ç–∏ –≤–µ–ª–∏—á–∏–Ω—ã —Å–≤—è–∑–∞–Ω—ã –º–µ–∂–¥—É —Å–æ–±–æ–π. –ê –∏–º–µ–Ω–Ω–æ, <Length> = (<Turns/layer> + 1) * <Spacing>. –ï–¥–∏–Ω–∏—Ü–∞ –≤ —Ñ–æ—Ä–º—É–ª–µ –ø–æ—è–≤–∏–ª–∞—Å—å –∏–∑-–∑–∞ —Ç–æ–≥–æ, —á—Ç–æ —Ä–µ–∞–ª—å–Ω–∞—è –¥–ª–∏–Ω–∞ –Ω–∞–º–æ—Ç–∫–∏ –±–æ–ª—å—à–µ –≤–µ–ª–∏—á–∏–Ω—ã —Å–º–µ—â–µ–Ω–∏—è —É–∫–ª–∞–¥—á–∏–∫–∞ –Ω–∞ –¥–∏–∞–º–µ—Ç—Ä –ø—Ä–æ–≤–æ–¥–∞. –ù–∞–ø—Ä–∏–º–µ—Ä, –æ–¥–∏–Ω –≤–∏—Ç–æ–∫ –ø—Ä–∏ –Ω–∞–º–æ—Ç–∫–µ "–≤–∏—Ç–æ–∫ –∫ –≤–∏—Ç–∫—É" –∏–º–µ–µ—Ç –¥–ª–∏–Ω—É, —Ä–∞–≤–Ω—É—é –¥–≤—É–º –¥–∏–∞–º–µ—Ç—Ä–∞–º –ø—Ä–æ–≤–æ–¥–∞. –ü—Ä–∏ –∏–∑–º–µ–Ω–µ–Ω–∏–∏ –æ–¥–Ω–æ–≥–æ –∏–∑ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ Length –∏ Turns/layer –≤—Ç–æ—Ä–æ–π –º–µ–Ω—è–µ—Ç—Å—è –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏. –í —Å–ª—É—á–∞–µ, –µ—Å–ª–∏ –∏–∑–º–µ–Ω—è–µ—Ç—Å—è –¥–ª–∏–Ω–∞ –Ω–∞–º–æ—Ç–∫–∏, –≤—ã–±–∏—Ä–∞–µ—Ç—Å—è –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–µ —á–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤, —É–º–µ—â–∞—é—â–∏—Ö—Å—è –Ω–∞ —ç—Ç–æ–π –¥–ª–∏–Ω–µ. –ß–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤ –≤ —Å–ª–æ–µ –º–µ–Ω—è–µ—Ç—Å—è –æ—Ç 1 –¥–æ –æ–±—â–µ–≥–æ —á–∏—Å–ª–∞ –≤–∏—Ç–∫–æ–≤, –∞ –¥–ª–∏–Ω–∞ –Ω–∞–º–æ—Ç–∫–∏ - –≤ –¥–∏–∞–ø–∞–∑–æ–Ω–µ –æ—Ç —É–¥–≤–æ–µ–Ω–Ω–æ–≥–æ —à–∞–≥–∞ –¥–æ –¥–ª–∏–Ω—ã, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–µ–π –æ–±—â–µ–º—É —á–∏—Å–ª—É –≤–∏—Ç–∫–æ–≤. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –ø—Ä–∏ –∏–∑–º–µ–Ω–µ–Ω–∏–∏ –¥–ª–∏–Ω—ã —á–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤ –±—É–¥–µ—Ç —Ç–∞–∫–∂–µ –ª–µ–∂–∞—Ç—å –≤ –ø—Ä–µ–¥–µ–ª–∞—Ö –æ—Ç 1 –¥–æ –æ–±—â–µ–≥–æ —á–∏—Å–ª–∞ –≤–∏—Ç–∫–æ–≤. –ù–µ–º–Ω–æ–≥–æ —Å–ª–æ–∂–Ω–µ–µ –æ–±—Å—Ç–æ–∏—Ç –¥–µ–ª–æ, –µ—Å–ª–∏ –∏–∑–º–µ–Ω—è–µ—Ç—Å—è —à–∞–≥ –Ω–∞–º–æ—Ç–∫–∏ (Spacing). –í —ç—Ç–æ–º —Å–ª—É—á–∞–µ –¥–ª–∏–Ω–∞ –Ω–∞–º–æ—Ç–∫–∏ –æ—Å—Ç–∞—ë—Ç—Å—è –Ω–µ–∏–∑–º–µ–Ω–Ω–æ–π, –∞ —á–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤ –≤ —Å–ª–æ–µ –ø–µ—Ä–µ—Å—á–∏—Ç—ã–≤–∞–µ—Ç—Å—è (–∏ –æ–ø—è—Ç—å –±–µ—Ä—ë—Ç—Å—è –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ). –ï—Å–ª–∏ –ø–æ–ª—É—á–µ–Ω–Ω–æ–µ —á–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤ –ø—Ä–µ–≤—ã—à–∞–µ—Ç –æ–±—â–µ–µ —á–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤, –¥–ª–∏–Ω–∞ –Ω–∞–º–æ—Ç–∫–∏ —É–º–µ–Ω—å—à–∞–µ—Ç—Å—è –¥–æ (<Turns> + 1) * <Spacing>, –∞ –µ—Å–ª–∏ –ø–æ–ª—É—á–µ–Ω–æ —á–∏—Å–ª–æ 0, —Ç–æ –¥–ª–∏–Ω–∞ —É–≤–µ–ª–∏—á–∏–≤–∞–µ—Ç—Å—è –¥–æ 2 * <Spacing>. –ß–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤ –≤ —ç—Ç–∏—Ö —Å–ª—É—á–∞—è—Ö –∫–æ—Ä—Ä–µ–∫—Ç–∏—Ä—É–µ—Ç—Å—è —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–º –æ–±—Ä–∞–∑–æ–º. –ö–Ω–æ–ø–∫–∏ Left, Right, Up, Down –æ–±—Ä–∞–∑—É—é—Ç –ø–æ–¥–æ–±–∏–µ –¥–∂–æ–π—Å—Ç–∏–∫–∞. –û–Ω–∏ –ø–æ–∑–≤–æ–ª—è—é—Ç –≤—Ä—É—á–Ω—É—é –≤—ã—Å—Ç–∞–≤–∏—Ç—å —É–∫–ª–∞–¥—á–∏–∫ –∏ –ø–æ–≤–µ—Ä–Ω—É—Ç—å –∫–∞—Ç—É—à–∫—É. –Ý–∞–±–æ—Ç–∞—é—Ç –æ–Ω–∏ –≤ —Ç–æ–º —Å–ª—É—á–∞–µ, –µ—Å–ª–∏ –Ω–µ –∑–∞–ø—É—â–µ–Ω–∞ –Ω–∞–º–æ—Ç–∫–∞ (—Å–ª–æ–≤–æ Ready –≤ –ª–µ–≤–æ–º –≤–µ—Ä—Ö–Ω–µ–º —É–≥–ª—É). –ü—Ä–∏ –Ω–∞–∂–∞—Ç–∏–∏ –Ω–∞ –ª—é–±—É—é –∏–∑ –Ω–∏—Ö –Ω–∞ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä –≤—ã–≤–æ–¥—è—Ç—Å—è —Ç–µ–∫—É—â–∏–µ –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã (–æ–± —ç—Ç–æ–º —è —Ä–∞—Å—Å–∫–∞–∂—É –ø–æ–¥—Ä–æ–±–Ω–µ–µ –≤ –æ–ø–∏—Å–∞–Ω–∏–µ —Ä–µ–∂–∏–º–∞ Manual). –ï—Å–ª–∏ –Ω–∞–∂–∞—Ç–∞ –æ–¥–Ω–∞ –∏–∑ –∫–Ω–æ–ø–æ–∫ Up –∏ Down (—Ç.–µ. –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –ø–æ–≤–æ—Ä–æ—Ç –∫–∞—Ç—É—à–∫–∏), –≤—ã–≤–æ–¥–∏—Ç—Å—è —Ç–∞–∫–∂–µ —Ç–µ–∫—É—â–µ–µ –∑–Ω–∞—á–µ–Ω–∏–µ —Å–∫–æ—Ä–æ—Å—Ç–∏ –≤—Ä–∞—â–µ–Ω–∏—è, –∫–æ—Ç–æ—Ä—É—é –º–æ–∂–Ω–æ –º–µ–Ω—è—Ç—å –ø—Ä—è–º–æ –≤ –ø—Ä–æ—Ü–µ—Å—Å–µ –ø—Ä–∏ –ø–æ–º–æ—â–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞. 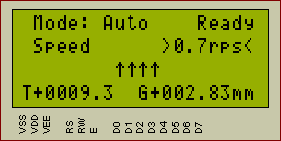 –Ý–µ–∂–∏–º Manual –∏–º–µ–µ—Ç —Å–ª–µ–¥—É—é—â–∏–µ –æ—Ç–ª–∏—á–∏—è –æ—Ç —Ä–µ–∂–∏–º–∞ Auto: 1. –£–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —à–∞–≥–æ–≤—ã–º–∏ –¥–≤–∏–≥–∞—Ç–µ–ª—è–º–∏ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è —Ç–æ–ª—å–∫–æ –ø—Ä–∏ –ø–æ–º–æ—â–∏ –∫–Ω–æ–ø–æ–∫. 2. –°–∏–≥–Ω–∞–ª ENABLE —Å –¥—Ä–∞–π–≤–µ—Ä–æ–≤ –®–î –Ω–µ —Å–Ω–∏–º–∞–µ—Ç—Å—è –ø–æ—Å–ª–µ –æ—Å—Ç–∞–Ω–æ–≤–∫–∏ –¥–≤–∏–≥–∞—Ç–µ–ª–µ–π, —Ç.–µ. —Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω —Ä–µ–∂–∏–º —É–¥–µ—Ä–∂–∞–Ω–∏—è. 3. –¢–µ–∫—É—â–∏–µ –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –æ—Ç–æ–±—Ä–∞–∂–∞—é—Ç—Å—è –ø–æ—Å—Ç–æ—è–Ω–Ω–æ, –∞ –Ω–µ —Ç–æ–ª—å–∫–æ –ø—Ä–∏ –Ω–∞–∂–∞—Ç–∏–∏ –Ω–∞ –∫–Ω–æ–ø–∫–∏ –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏—è. –ú–µ–Ω—é –≤ —Ä–µ–∂–∏–º–µ Manual —Å–æ—Å—Ç–æ–∏—Ç –∏–∑ –¥–≤—É—Ö –ø—É–Ω–∫—Ç–æ–≤: 1. Speed - –∞–Ω–∞–ª–æ–≥–∏—á–µ–Ω —Ç–∞–∫–æ–º—É –∂–µ –ø—É–Ω–∫—Ç—É –≤ —Ä–µ–∂–∏–º–µ Auto; 2. Reset position - –æ–±–Ω—É–ª–µ–Ω–∏–µ —Ç–µ–∫—É—â–∏—Ö –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç. 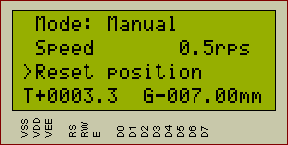 –ö–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è—é—Ç —Å–æ–±–æ–π –¥–≤–∞ —á–∏—Å–ª–∞: T (Turn) –∏ G (Guide). –ü–µ—Ä–≤–æ–µ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç —á–∏—Å–ª—É –≤–∏—Ç–∫–æ–≤ (–≤–µ—Ä–Ω–µ–µ, —á–∏—Å–ª—É –æ–±–æ—Ä–æ—Ç–æ–≤), –≤—Ç–æ—Ä–æ–µ - –ø–æ–ª–æ–∂–µ–Ω–∏—é —É–∫–ª–∞–¥—á–∏–∫–∞ (–≤ –º–º). –ö–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –º–æ–≥—É—Ç –±—ã—Ç—å –∫–∞–∫ –ø–æ–ª–æ–∂–∏—Ç–µ–ª—å–Ω—ã–º–∏, —Ç–∞–∫ –∏ –æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω—ã–º–∏. –Ý—É—á–Ω–æ–π —Ä–µ–∂–∏–º –∏–º–µ–µ—Ç –Ω–µ—Å–∫–æ–ª—å–∫–æ –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–π. –í–æ-–ø–µ—Ä–≤—ã—Ö, –µ–≥–æ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –¥–ª—è –Ω–∞–º–æ—Ç–∫–∏ —Å —É–∫–ª–∞–¥–∫–æ–π –ø—Ä–æ–≤–æ–¥–∞ –≤—Ä—É—á–Ω—É—é. –Ý–µ–∂–∏–º —É–¥–µ—Ä–∂–∞–Ω–∏—è –®–î –∏—Å–∫–ª—é—á–∞–µ—Ç –ø—Ä–æ–≤–æ—Ä–æ—Ç –¥–≤–∏–≥–∞—Ç–µ–ª—è –Ω–∞–º–æ—Ç–∫–∏ –∏–∑-–∑–∞ –Ω–∞—Ç—è–∂–µ–Ω–∏—è –ø—Ä–æ–≤–æ–¥–∞. –í–æ-–≤—Ç–æ—Ä—ã—Ö, –º–æ–∂–Ω–æ –Ω–∞–º–∞—Ç—ã–≤–∞—Ç—å –∫–∞—Ç—É—à–∫–∏ —Å–æ —Å–ª–æ–∂–Ω–æ–π –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏–µ–π –æ–±–º–æ—Ç–æ–∫ (–ø–µ—Ä–µ–º–µ–Ω–Ω—ã–π —à–∞–≥ –∏–ª–∏ –µ—â—ë —á—Ç–æ-—Ç–æ –ø–æ–¥–æ–±–Ω–æ–µ). –í-—Ç—Ä–µ—Ç—å–∏—Ö, –ø–æ—Å–∫–æ–ª—å–∫—É –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –≤–∏–¥–Ω—ã –Ω–∞ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä–µ, –ª–µ–≥–∫–æ –º–æ–∂–Ω–æ –æ—Å—É—â–µ—Å—Ç–≤–∏—Ç—å –Ω–∞—á–∞–ª—å–Ω–æ–µ –ø–æ–∑–∏—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏–µ —É–∫–ª–∞–¥—á–∏–∫–∞. –ù–∞–ø—Ä–∏–º–µ—Ä, –µ—Å–ª–∏ –Ω—É–∂–Ω–æ –Ω–∞–º–æ—Ç–∞—Ç—å –Ω–∞ –æ–¥–Ω—É –∫–∞—Ç—É—à–∫—É –Ω–µ—Å–∫–æ–ª—å–∫–æ –æ–±–º–æ—Ç–æ–∫, —Ç–æ –≤ —Ä—É—á–Ω–æ–º —Ä–µ–∂–∏–º–µ –º–æ–∂–Ω–æ –¥–æ –Ω–∞–º–æ—Ç–∫–∏ –ø–µ—Ä–≤–æ–π –æ–±–º–æ—Ç–∫–∏ –æ–±–Ω—É–ª–∏—Ç—å –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã —É –ª–µ–≤–æ–≥–æ –∫—Ä–∞—è –∫–∞—Ä–∫–∞—Å–∞, –ø–æ—Ç–æ–º –≤—ã–ø–æ–ª–Ω–∏—Ç—å –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫—É—é –Ω–∞–º–æ—Ç–∫—É –≤ –æ–¥–∏–Ω —Å–ª–æ–π, –∞ –∑–∞—Ç–µ–º —Å–Ω–æ–≤–∞ –≤ —Ä–µ–∂–∏–º–µ Manual –≤–µ—Ä–Ω—É—Ç—å —É–∫–ª–∞–¥—á–∏–∫ –æ—Ç –ø—Ä–∞–≤–æ–≥–æ –∫—Ä–∞—è –∫–∞—Ä–∫–∞—Å–∞ –≤ –ø–æ–ª–æ–∂–µ–Ω–∏–µ, –±–ª–∏–∑–∫–æ–µ –∫ –Ω—É–ª—é. –í–æ–∑–º–æ–∂–Ω–æ, –µ—Å—Ç—å –∏ –µ—â—ë –∫–∞–∫–∏–µ-—Ç–æ —Å–ø–æ—Å–æ–±—ã –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è —ç—Ç–æ–≥–æ —Ä–µ–∂–∏–º–∞. –î–≤–∏–≥–∞—Ç–µ–ª—è–º–∏ –º–æ–∂–Ω–æ —É–ø—Ä–∞–≤–ª—è—Ç—å –∫–∞–∫ —É–≥–æ–¥–Ω–æ, –ø–æ—ç—Ç–æ–º—É —É–¥–∞—Å—Ç—Å—è —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –ª—é–±—É—é –∏–¥–µ—é. –ü–æ—Å–∫–æ–ª—å–∫—É —É –∂–µ–ª–∞—é—â–∏—Ö –ø–æ–≤—Ç–æ—Ä–∏—Ç—å —ç—Ç–æ—Ç –ø—Ä–æ–µ–∫—Ç –º–æ–≥—É—Ç –±—ã—Ç—å —Ä–∞–∑–ª–∏—á–Ω—ã–µ –¥–≤–∏–≥–∞—Ç–µ–ª–∏, —Ö–æ–¥–æ–≤–æ–π –≤–∏–Ω—Ç –∏ –ø—Ä–æ—á–µ–µ, —è –≤—ã–∫–ª–∞–¥—ã–≤–∞—é –∏—Å—Ö–æ–¥–Ω–∏–∫–∏, —á—Ç–æ–±—ã –ª—é–±–æ–π –∂–µ–ª–∞—é—â–∏–π —Å–º–æ–≥ –ø–æ–¥–ø—Ä–∞–≤–∏—Ç—å –∏—Ö –ø–æ–¥ —Å–≤–æ—é –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏—é. –ü—Ä–æ–≥—Ä–∞–º–º–∞ –Ω–∞–ø–∏—Å–∞–Ω–∞ –Ω–∞ —è–∑—ã–∫–µ –°–∏. –í –∫–∞—á–µ—Å—Ç–≤–µ —Å—Ä–µ–¥—ã —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è Code::Blocks, –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä - avr-gcc –≤–µ—Ä—Å–∏–∏ 8.3.0. –¢–µ–æ—Ä–µ—Ç–∏—á–µ—Å–∫–∏, –º–æ–∂–Ω–æ –æ–±–æ–π—Ç–∏—Å—å –±–µ–∑ Code::Blocks, —Å–æ–∑–¥–∞–≤ Makefile, –Ω–æ —è —ç—Ç–æ–≥–æ –ø–æ–∫–∞ —á—Ç–æ –Ω–µ –¥–µ–ª–∞–ª. –í —Ñ–∞–π–ª–∞—Ö pins.h –∏ lcdlibrary/lcd_definitions.h –º–æ–∂–Ω–æ –ø–µ—Ä–µ–Ω–∞–∑–Ω–∞—á–∏—Ç—å –≤—ã–≤–æ–¥—ã –ú–ö. –í–æ –≤—Ç–æ—Ä–æ–º –∏–∑ –Ω–∏—Ö –æ–ø–∏—Å—ã–≤–∞–µ—Ç—Å—è –ø–æ–¥–∫–ª—é—á–µ–Ω–∏–µ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä–∞, –∞ –≤ –ø–µ—Ä–≤–æ–º - –≤—Å–µ–≥–æ –æ—Å—Ç–∞–ª—å–Ω–æ–≥–æ. –ü—Ä–∏ –ø–µ—Ä–µ–Ω–∞–∑–Ω–∞—á–µ–Ω–∏–∏ –≤—ã–≤–æ–¥–æ–≤ –µ—Å—Ç—å —Ä—è–¥ –æ–≥—Ä–∞–Ω–∏—á–µ–Ω–∏–π: 1. –ù–µ–∏—Å–ø–æ–ª—å–∑—É–µ–º—ã–π –ø–æ–∫–∞ —á—Ç–æ —ç–Ω–∫–æ–¥–µ—Ä –Ω–∞ –≤–∞–ª—É –¥–≤–∏–≥–∞—Ç–µ–ª—è –Ω–∞–º–æ—Ç–∫–∏ –¥–æ–ª–∂–µ–Ω –ø–æ–¥–∫–ª—é—á–∞—Ç—å—Å—è —Ç–æ–ª—å–∫–æ –∫ PD2 –∏ PD3, —Ç.–µ. –µ–≥–æ –ø–æ–¥–∫–ª—é—á–µ–Ω–∏–µ –º–µ–Ω—è—Ç—å –Ω–µ–ª—å–∑—è. 2. –≠–Ω–∫–æ–¥–µ—Ä –¥–ª—è –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ –Ω—É–∂–Ω–æ –ø–æ–¥–∫–ª—é—á–∞—Ç—å –∫ –¥–≤—É–º —Å–æ—Å–µ–¥–Ω–∏–º –±–∏—Ç–∞–º –æ–¥–Ω–æ–≥–æ –ø–æ—Ä—Ç–∞ (PB4 –∏ PB5, PD3 –∏ PD2 –∏ –ø—Ä–æ—á–µ–µ). "–ü–æ–ª–æ–∂–∏—Ç–µ–ª—å–Ω—ã–º" –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º –≤—Ä–∞—â–µ–Ω–∏—è —Å—á–∏—Ç–∞–µ—Ç—Å—è —Ç–æ, –≤ –∫–æ—Ç–æ—Ä–æ–º –∫–æ–Ω—Ç–∞–∫—Ç, –ø–æ–¥–∫–ª—é—á–µ–Ω–Ω—ã–π –∫ —Ü–µ–ø–∏ ENCODER_A, –∑–∞–º—ã–∫–∞–µ—Ç—Å—è –ø–µ—Ä–≤—ã–º (—Ä–∞–Ω—å—à–µ). 3. –î–ª—è –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–∏ –≤–Ω—É—Ç—Ä–∏—Å—Ö–µ–º–Ω–æ–≥–æ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è –ú–ö –∫ –≤—ã–≤–æ–¥–∞–º –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è SCK, MISO, MOSI (PB5, PB6, PB7) –Ω–µ —Ä–µ–∫–æ–º–µ–Ω–¥—É–µ—Ç—Å—è –ø–æ–¥–∫–ª—é—á–∞—Ç—å –≤—ã–≤–æ–¥—ã D4..D7 –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä–∞, –∞ —Ç–∞–∫–∂–µ –≤—Ö–æ–¥—ã ENABLE –∏ STEP –¥—Ä–∞–π–≤–µ—Ä–æ–≤ –®–î. –ü–∞—Ä–∞–º–µ—Ç—Ä—ã –º–µ—Ö–∞–Ω–∏–∫–∏ –∑–∞–¥–∞—é—Ç—Å—è –≤ —Ñ–∞–π–ª–µ winding.h. –¢–∞–º –∑–∞–¥–∞—ë—Ç—Å—è —á–∏—Å–ª–æ —à–∞–≥–æ–≤ –Ω–∞ 1 –æ–±–æ—Ä–æ—Ç –∫–∞–∂–¥–æ–≥–æ –∏–∑ —à–∞–≥–æ–≤—ã—Ö –¥–≤–∏–≥–∞—Ç–µ–ª–µ–π, –¥—Ä–æ–±–ª–µ–Ω–∏–µ —à–∞–≥–∞ (–º–∏–∫—Ä–æ—à–∞–≥, —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω—ã–π –Ω–∞ –¥—Ä–∞–π–≤–µ—Ä–µ), —à–∞–≥ —Ä–µ–∑—å–±—ã —Ö–æ–¥–æ–≤–æ–≥–æ –≤–∏–Ω—Ç–∞ (–≤ —Å–ª—É—á–∞–µ –º–Ω–æ–≥–æ–∑–∞—Ö–æ–¥–Ω–æ–π —Ä–µ–∑—å–±—ã - —Ö–æ–¥ —Ä–µ–∑—å–±—ã). –¢–∞–∫–∂–µ –∑–∞–¥–∞—ë—Ç—Å—è —É—Å–∫–æ—Ä–µ–Ω–∏–µ –¥–≤–∏–≥–∞—Ç–µ–ª–µ–π (—Å–∫–æ—Ä–æ—Å—Ç—å —Ä–∞–∑–≥–æ–Ω–∞) –≤ –æ–±./—Å^2 (rps/sec). –í —Ñ–∞–π–ª–µ winding.h –µ—Å—Ç—å –ø–∞—Ä–∞–º–µ—Ç—Ä MOTOR_STEP_DIVIDER, –∏—Å–ø–æ–ª—å–∑—É–µ–º—ã–π –¥–ª—è –æ–ø—Ç–∏–º–∏–∑–∞—Ü–∏–∏ –≤—ã—á–∏—Å–ª–µ–Ω–∏–π. –ï–≥–æ —Å–ª–µ–¥—É–µ—Ç —Ä–∞—Å—Å—á–∏—Ç–∞—Ç—å –≤—Ä—É—á–Ω—É—é –∫–∞–∫ –Ω–∞–∏–±–æ–ª—å—à–∏–π –æ–±—â–∏–π –¥–µ–ª–∏—Ç–µ–ª—å (–ù–û–î) –∑–Ω–∞—á–µ–Ω–∏–π TURN_MOTOR_MICROSTEPS_PER_REVOLUTION –∏ GUIDE_MOTOR_MICROSTEPS_PER_REVOLUTION (—ç—Ç–æ —á–∏—Å–ª–æ –º–∏–∫—Ä–æ—à–∞–≥–æ–≤ –Ω–∞ –æ–¥–∏–Ω –æ–±–æ—Ä–æ—Ç –¥–≤–∏–≥–∞—Ç–µ–ª–µ–π). –í –ø—Ä–æ—Å—Ç–µ–π—à–µ–º —Å–ª—É—á–∞–µ, –µ—Å–ª–∏ –¥–≤–∏–≥–∞—Ç–µ–ª–∏ –æ–¥–∏–Ω–∞–∫–æ–≤—ã, —ç—Ç–æ —á–∏—Å–ª–æ —Ä–∞–≤–Ω–æ –ø—Ä–æ–∏–∑–≤–µ–¥–µ–Ω–∏—é —á–∏—Å–ª–∞ —à–∞–≥–æ–≤ –Ω–∞ –¥—Ä–æ–±–ª–µ–Ω–∏–µ —à–∞–≥–∞ (—Ç.–µ. –≤—Å–µ —Ç—Ä–∏ –∑–Ω–∞—á–µ–Ω–∏—è MOTOR_STEP_DIVIDER, TURN_MOTOR_MICROSTEPS_PER_REVOLUTION –∏ GUIDE_MOTOR_MICROSTEPS_PER_REVOLUTION —Ä–∞–≤–Ω—ã –¥—Ä—É–≥ –¥—Ä—É–≥—É). –í —Ñ–∞–π–ª–µ main.c –∑–∞–¥–∞—é—Ç—Å—è —Ç–∞–∫–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã, –∫–∞–∫ –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–µ –∏ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–µ —á–∏—Å–ª–æ –≤–∏—Ç–∫–æ–≤, –º–∏–Ω–∏–º–∞–ª—å–Ω—ã–π –∏ –º–∞–∫—Å–∏–º–∞–ª—å–Ω—ã–π —à–∞–≥ –Ω–∞–º–æ—Ç–∫–∏, –º–∏–Ω–∏–º–∞–ª—å–Ω–∞—è –∏ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–∞—è —Å–∫–æ—Ä–æ—Å—Ç—å, –∞ —Ç–∞–∫–∂–µ —Å–∫–æ—Ä–æ—Å—Ç—å –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏—è —É–∫–ª–∞–¥—á–∏–∫–∞ –ø—Ä–∏ –Ω–∞–∂–∞—Ç–∏–∏ –∫–Ω–æ–ø–æ–∫ Left –∏ Right. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –º–æ–∂–µ—Ç –ø–æ—Ç—Ä–µ–±–æ–≤–∞—Ç—å—Å—è –æ—Ç—Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —á–µ—Ç—ã—Ä–µ —Ñ–∞–π–ª–∞: pins.h, lcdlibrary/lcd_definitions.h, winding.h –∏ main.c. –ù–∞–ø–æ—Å–ª–µ–¥–æ–∫, –∫–∞—Ä—Ç–∏–Ω–∫–∞ —Å —Ñ—å—é–∑–∞–º–∏ –ú–ö ("–≥–∞–ª–æ—á–∫–∞" - –∑–∞–ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–æ, —Ç.–µ. –ª–æ–≥. 0): 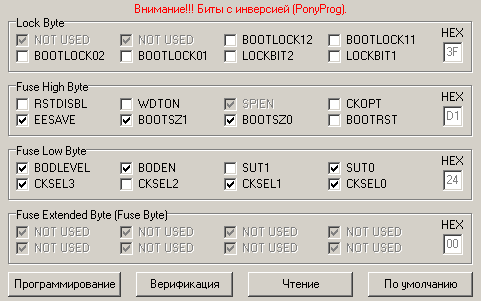 –í –∞—Ä—Ö–∏–≤–µ –Ω–∞—Ö–æ–¥—è—Ç—Å—è: —Å—Ö–µ–º–∞ –≤ DipTrace, PNG –∏ PDF, –ø—Ä–æ–µ–∫—Ç Proteus –¥–ª—è –æ–∑–Ω–∞–∫–æ–º–ª–µ–Ω–∏—è —Å —Ä–∞–±–æ—Ç–æ–π —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞, –ø—Ä–æ—à–∏–≤–∫–∞ —Å –∏—Å—Ö–æ–¥–Ω–∏–∫–∞–º–∏ –∏ –ø—Ä–æ–µ–∫—Ç Code::Blocks, –∫–∞—Ä—Ç–∏–Ω–∫–∞ —Å —Ñ—å—é–∑–∞–º–∏. –í–ª–æ–∂–µ–Ω–∏–µ: –ü—Ä–æ—á—É—é –ø–æ–ª–µ–∑–Ω—É—é –¥–ª—è –ø–æ–≤—Ç–æ—Ä–µ–Ω–∏—è –¥–∞–Ω–Ω–æ–π –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é (–ø–µ—á–∞—Ç–Ω—É—é –ø–ª–∞—Ç—É, –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏—é –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–æ–π —á–∞—Å—Ç–∏, –º–æ–¥–µ–ª–∏ –¥–ª—è 3D-–ø–µ—á–∞—Ç–∏ –¥–µ—Ç–∞–ª–µ–π –∏ —Ç.–¥.) –≤ —Å–∫–æ—Ä–æ–º –≤—Ä–µ–º–µ–Ω–∏ –≤—ã–ª–æ–∂–∏—Ç –Ø–Ω. |
|
| –ê–≤—Ç–æ—Ä: | gsmart [ –í—Å —è–Ω–≤ 24, 2021 00:29:46 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–Ý–∞–∑ —Ç–∞–∫–∞—è —Ç–µ–º–∞ –ø—Ä–æ –Ω–∞–º–æ—Ç–æ—á–Ω—ã–µ —Å—Ç–∞–Ω–∫–∏, —Å—Ç–∞–Ω–æ–∫ –¥–ª—è –Ω–∞–º–æ—Ç–∫–∏ –∫–∞—Ç—É—à–µ–∫ —É–Ω–∏–≤–µ—Ä—Å–∞–ª—å—é, —ç—Ç–æ –ø–æ—á—Ç–∏ —Ç–æ—á–Ω–∞—è –∫–æ–ø–∏—è —Å—Ç–∞–Ω–∫–∞ –∏–∑ –∂—É—Ä–Ω–∞–ª–∞ –Ý–∞–¥–∏–æ, ‚Ññ8 –∑–∞ 1954 –≥–æ–¥:  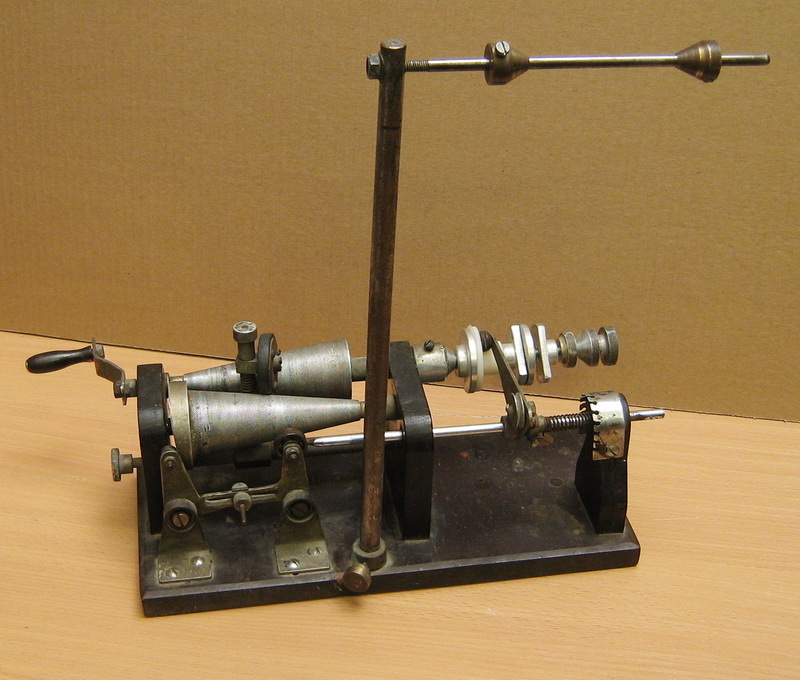     
|
|
| –ê–≤—Ç–æ—Ä: | korob [ –í—Å —è–Ω–≤ 24, 2021 00:37:48 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
*Trigger*, –ø—Ä–æ—Å—Ç–æ –Ω–µ—Ç —Å–ª–æ–≤. *Trigger* –ø–∏—Å–∞–ª(–∞): –ü–æ—Å–∫–æ–ª—å–∫—É —É –∂–µ–ª–∞—é—â–∏—Ö –ø–æ–≤—Ç–æ—Ä–∏—Ç—å —ç—Ç–æ—Ç –ø—Ä–æ–µ–∫—Ç –º–æ–≥—É—Ç –±—ã—Ç—å —Ä–∞–∑–ª–∏—á–Ω—ã–µ –¥–≤–∏–≥–∞—Ç–µ–ª–∏, —Ö–æ–¥–æ–≤–æ–π –≤–∏–Ω—Ç –∏ –ø—Ä–æ—á–µ–µ, —è –≤—ã–∫–ª–∞–¥—ã–≤–∞—é –∏—Å—Ö–æ–¥–Ω–∏–∫–∏, —á—Ç–æ–±—ã –ª—é–±–æ–π –∂–µ–ª–∞—é—â–∏–π —Å–º–æ–≥ –ø–æ–¥–ø—Ä–∞–≤–∏—Ç—å –∏—Ö –ø–æ–¥ —Å–≤–æ—é –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏—é. –ê –Ω–µ –ø–ª–∞–Ω–∏—Ä—É–µ—Ç—Å—è –ª–∏ —É—Å—Ç–∞–Ω–æ–≤–∫–∞ —á–∏—Å–ª–∞ —à–∞–≥–æ–≤ –Ω–∞ –æ–±–æ—Ä–æ—Ç/–º–∏–ª–ª–∏–º–µ—Ç—Ä –≤ –∫–∞–∫–æ–º –Ω–∏–±—É–¥—å —Å–µ—Ä–≤–∏—Å–Ω–æ–º –º–µ–Ω—é/—Ä–µ–∂–∏–º–µ? |
|
| –ê–≤—Ç–æ—Ä: | *Trigger* [ –í—Å —è–Ω–≤ 24, 2021 09:15:21 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
korob –ø–∏—Å–∞–ª(–∞): –ê –Ω–µ –ø–ª–∞–Ω–∏—Ä—É–µ—Ç—Å—è –ª–∏ —É—Å—Ç–∞–Ω–æ–≤–∫–∞ —á–∏—Å–ª–∞ —à–∞–≥–æ–≤ –Ω–∞ –æ–±–æ—Ä–æ—Ç/–º–∏–ª–ª–∏–º–µ—Ç—Ä –≤ –∫–∞–∫–æ–º –Ω–∏–±—É–¥—å —Å–µ—Ä–≤–∏—Å–Ω–æ–º –º–µ–Ω—é/—Ä–µ–∂–∏–º–µ? –ù–µ—Ç, —Ç–∞–∫–æ–≥–æ –≤ –ø–∞–ª–∞–Ω–∞—Ö –Ω–µ—Ç. –í–æ-–ø–µ—Ä–≤—ã—Ö, –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –º–µ—Ö–∞–Ω–∏–∫–∏ –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞—é—Ç—Å—è –≤—Å–µ–≥–æ –æ–¥–∏–Ω —Ä–∞–∑, –∏ –¥–µ–ª–∞—Ç—å –æ—Ç–¥–µ–ª—å–Ω—ã–π —Ä–µ–∂–∏–º –¥–ª—è –∏—Ö –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ - –∏–∑–ª–∏—à–µ—Å—Ç–≤–æ. –í–æ-–≤—Ç–æ—Ä—ã—Ö, —Å–µ–π—á–∞—Å –º–Ω–æ–≥–∏–µ —Ä–∞—Å—á—ë—Ç—ã –≤—ã–ø–æ–ª–Ω—è—é—Ç—Å—è –µ—â—ë –Ω–∞ —ç—Ç–∞–ø–µ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ –ø—Ä–æ—à–∏–≤–∫–∏, —á—Ç–æ —Å–∏–ª—å–Ω–æ –æ–±–ª–µ–≥—á–∞–µ—Ç –∑–∞–¥–∞—á—É –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—É. –ê –ø–∞–º—è—Ç–∏ –≤ –Ω—ë–º –Ω–µ —Ç–∞–∫ —É–∂ –º–Ω–æ–≥–æ, –ø–æ—ç—Ç–æ–º—É –æ—Ç–¥–µ–ª—å–Ω–æ–µ –º–µ–Ω—é —Å –Ω–∞—Å—Ç—Ä–æ–π–∫–∞–º–∏ –∏ –¥–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω—ã–µ –≤—ã—á–∏—Å–ª–µ–Ω–∏—è –º–æ–≥—É—Ç –ø—Ä–æ—Å—Ç–æ –Ω–µ –≤–ª–µ–∑—Ç—å. –ù–æ, –º–æ–∂–µ—Ç, –∏ –≤–ª–µ–∑—É—Ç - —è –æ—Å–æ–±–æ –Ω–µ –∑–∞–Ω–∏–º–∞–ª—Å—è –æ–ø—Ç–∏–º–∏–∑–∞—Ü–∏–µ–π –ø—Ä–æ–≥—Ä–∞–º–º—ã –ø–æ–¥ –º–∏–Ω–∏–º–∞–ª—å–Ω—ã–π —Ä–∞–∑–º–µ—Ä, –µ—Å—Ç—å, –∫—É–¥–∞ —É–º–µ–Ω—å—à–∞—Ç—å. –ù–∞–∫–æ–Ω–µ—Ü, –Ω–∞ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –º–µ—Ö–∞–Ω–∏–∫–∏ –µ—Å—Ç—å –Ω–µ–∫–æ—Ç–æ—Ä–æ–µ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –æ–≥—Ä–∞–Ω–∏—á–µ–Ω–∏–π, –∏–Ω–æ–≥–¥–∞ –≤–µ—Å—å–º–∞ –Ω–µ–æ—á–µ–≤–∏–¥–Ω—ã—Ö. –°–µ–π—á–∞—Å —ç—Ç–æ –≤—Å—ë –ø—Ä–æ–≤–µ—Ä—è–µ—Ç—Å—è –Ω–∞ —ç—Ç–∞–ø–µ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏, –∏ –≤—ã–¥–∞—ë—Ç—Å—è –æ—à–∏–±–∫–∞, –µ—Å–ª–∏ —á—Ç–æ-—Ç–æ –Ω–µ —Ç–∞–∫. –í —Å–ª—É—á–∞–µ –Ω–∞—Å—Ç—Ä–æ–µ–∫ –ø—Ä—è–º–æ –Ω–∞ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–µ –ø—Ä–∏–¥—ë—Ç—Å—è –¥–µ–ª–∞—Ç—å –µ—â—ë –∏ –≤—Å–µ —ç—Ç–∏ –ø—Ä–æ–≤–µ—Ä–∫–∏. –í –æ–±—â–µ–º, –Ω–µ—Ç —Å–º—ã—Å–ª–∞ —Ç–∞–∫ —Å–∏–ª—å–Ω–æ –∑–∞–º–æ—Ä–∞—á–∏–≤–∞—Ç—å—Å—è —Ä–∞–¥–∏ –æ–¥–Ω–æ–∫—Ä–∞—Ç–Ω–æ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ–º—ã—Ö –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤. –ü—Ä–∞–≤–∫–∞ –ø—Ä–æ–≥—Ä–∞–º–º—ã –∏ –ø–æ—Å–ª–µ–¥—É—é—â–∞—è –∫–æ–º–ø–∏–ª—è—Ü–∏—è –Ω–µ –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è—é—Ç –Ω–∏–∫–∞–∫–∏—Ö —Ç—Ä—É–¥–Ω–æ—Å—Ç–µ–π –¥–∞–∂–µ –¥–ª—è —Ç–µ—Ö, –∫—Ç–æ –¥–∞–ª—ë–∫ –æ—Ç –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è. –ù—É–∂–Ω–æ –≤—Å–µ–≥–æ –ª–∏—à—å –∏–∑–º–µ–Ω–∏—Ç—å –∫–æ–Ω—Å—Ç–∞–Ω—Ç—ã, –≤ —Å–∞–º –∫–æ–¥ –ª–µ–∑—Ç—å –Ω–µ —Ç—Ä–µ–±—É–µ—Ç—Å—è. |
|
| –ê–≤—Ç–æ—Ä: | –Ø–Ω [ –í—Å —è–Ω–≤ 24, 2021 10:13:56 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–í –¥–æ–ø–æ–ª–Ω–µ–Ω–∏–µ —Ç–µ–º—ã. –ï—Å–ª–∏ –∫—Ç–æ –∑–∞—Ö–æ—á–µ—Ç –ø–æ–≤—Ç–æ—Ä–∏—Ç—å, –Ω—É –∏–ª–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —á–∞—Å—Ç—å –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏, –≤—ã–∫–ª–∞–¥—ã–≤–∞—é –≤—Å–µ —á—Ç–æ –µ—Å—Ç—å –ø–æ –º–æ–µ–º—É —Å—Ç–∞–Ω–∫—É. –ü–ª–∞—Ç—É —è –æ—Ç—Ñ—Ä–µ–∑–µ—Ä–æ–≤–∞–ª –Ω–∞ –ß–ü–£. –õ–µ–Ω—å –±—ã–ª–æ —Ç—Ä–∞–≤–∏—Ç—å. 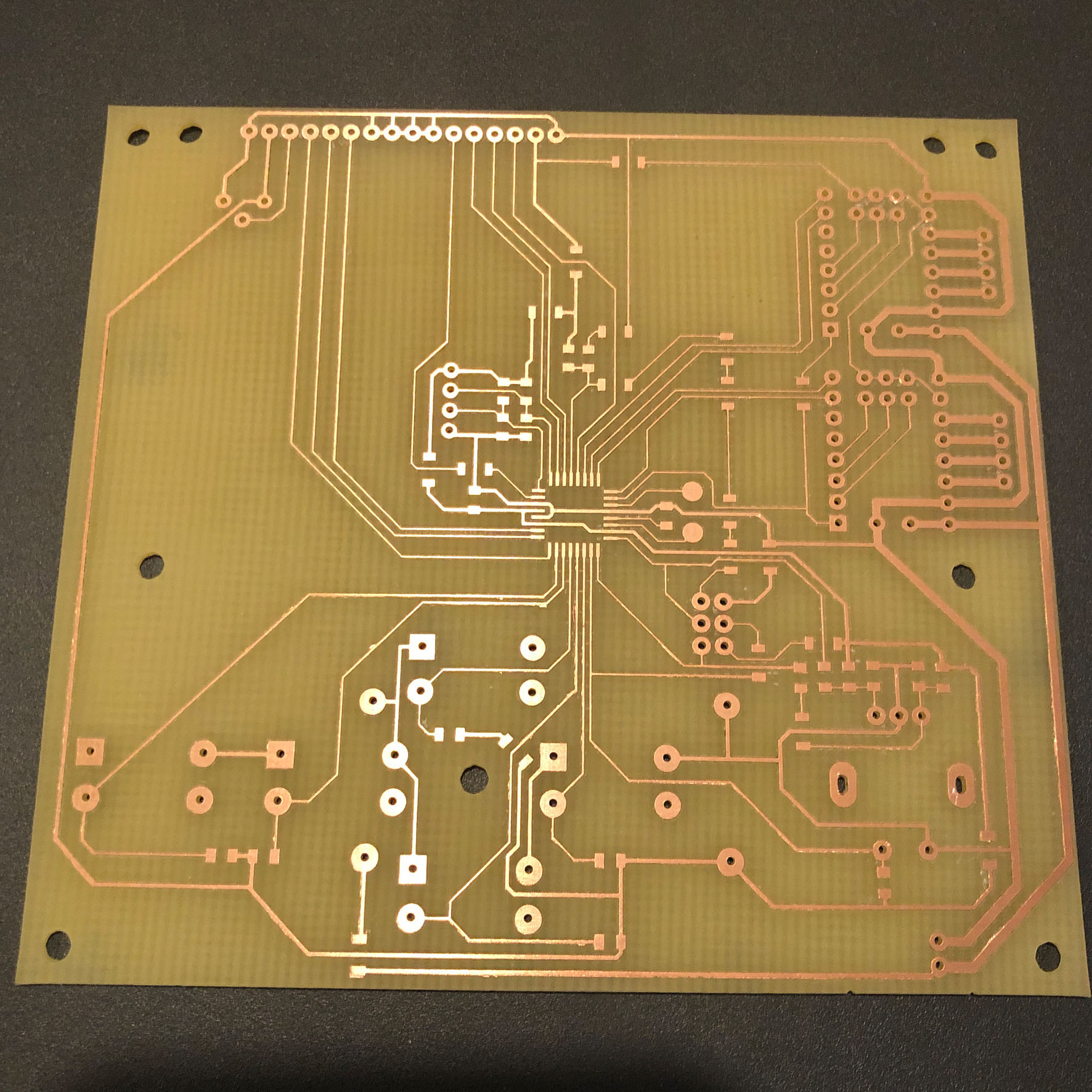 –ù–µ—Å–∫–æ–ª—å–∫–æ —Ñ–æ—Ç–æ–∫ –ø–ª–∞—Ç—ã. 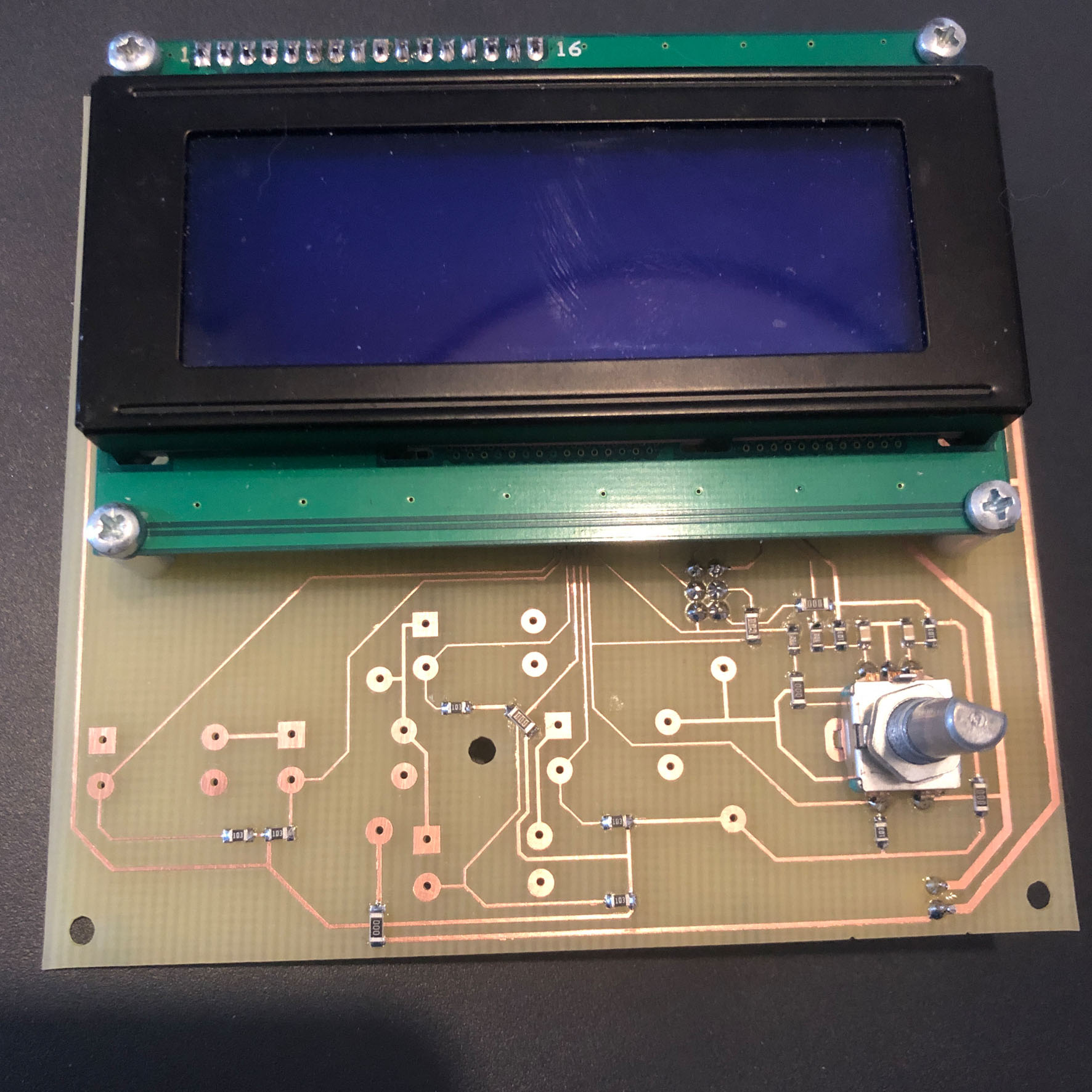  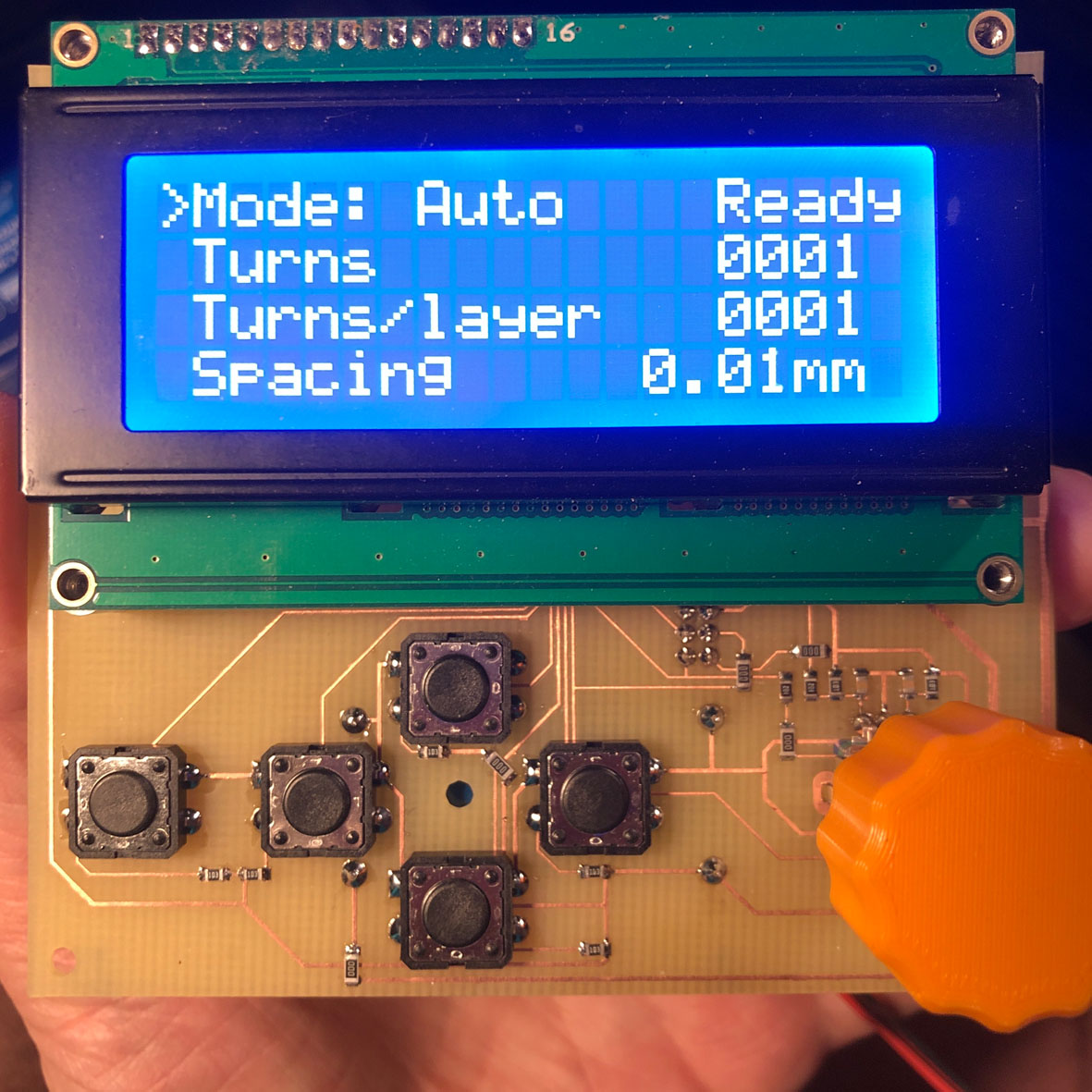 –ù–∞ –ø–æ—Å–ª–µ–¥–Ω–µ–π –ø–ª–∞—Ç–µ –ø—Ä–æ–º–µ–∂—É—Ç–æ—á–Ω–∞—è –ø—Ä–æ—à–∏–≤–∫–∞. –§–æ—Ç–æ —Å–∞–º–æ–≥–æ —Å—Ç–∞–Ω–∫–∞. –≠—Ç–æ –≤–µ—Ä—Å–∏—è —Å —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º –Ω–∞ –∞—Ä–¥—É–∏–Ω–æ, –Ω–æ–≤—É—é –∫–æ—Ä–æ–±–∫—É –ø–æ–¥ –ø–ª–∞—Ç—É —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –ø–æ–∫–∞ –Ω–µ –Ω–∞–ø–µ—á–∞—Ç–∞–ª.  –ù–µ–∫–æ—Ç–æ—Ä—ã–µ –¥–µ—Ç–∞–ª–∏ –∏ —É–∑–ª—ã —Å—Ç–∞–Ω–∫–∞. 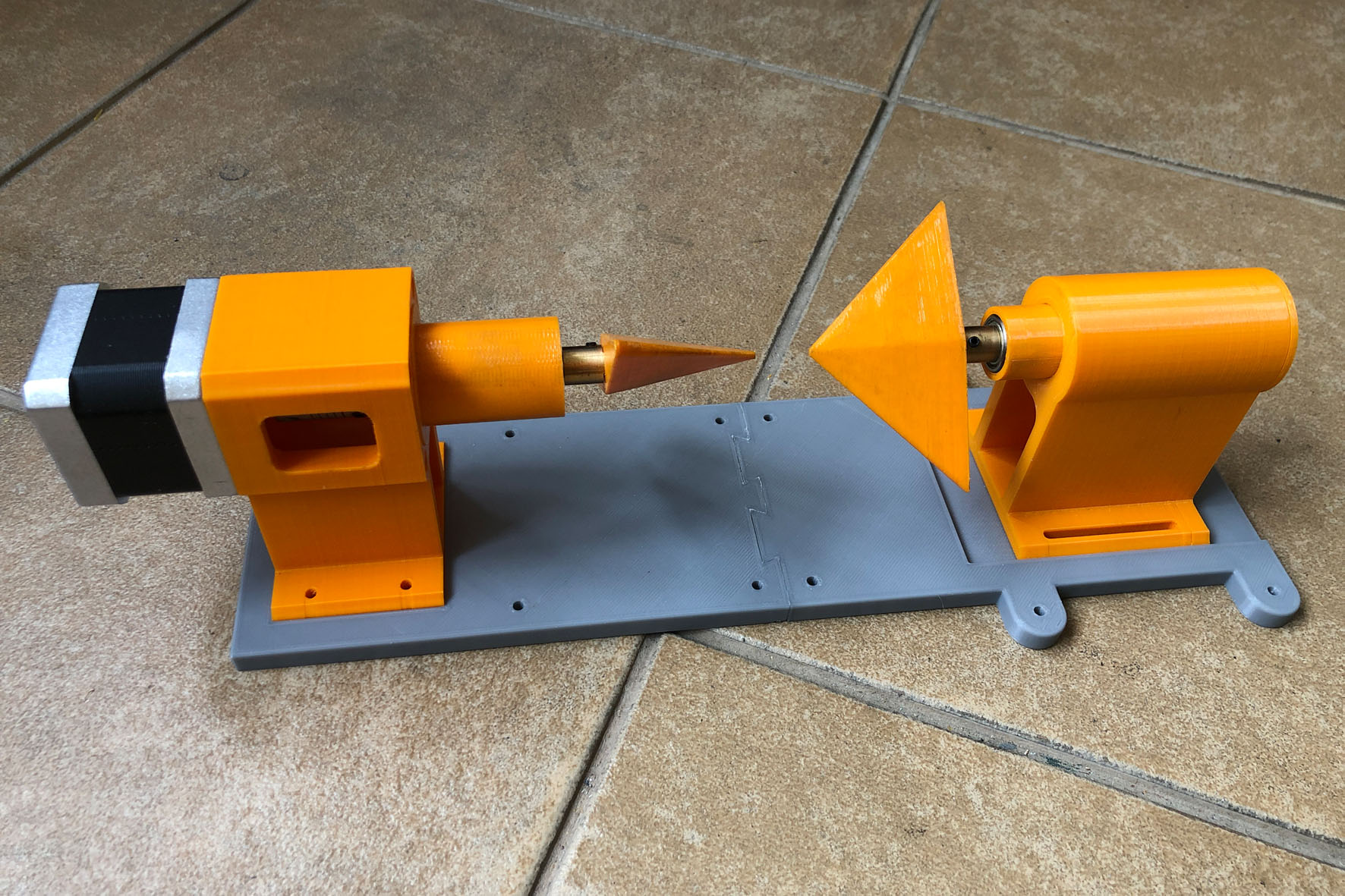 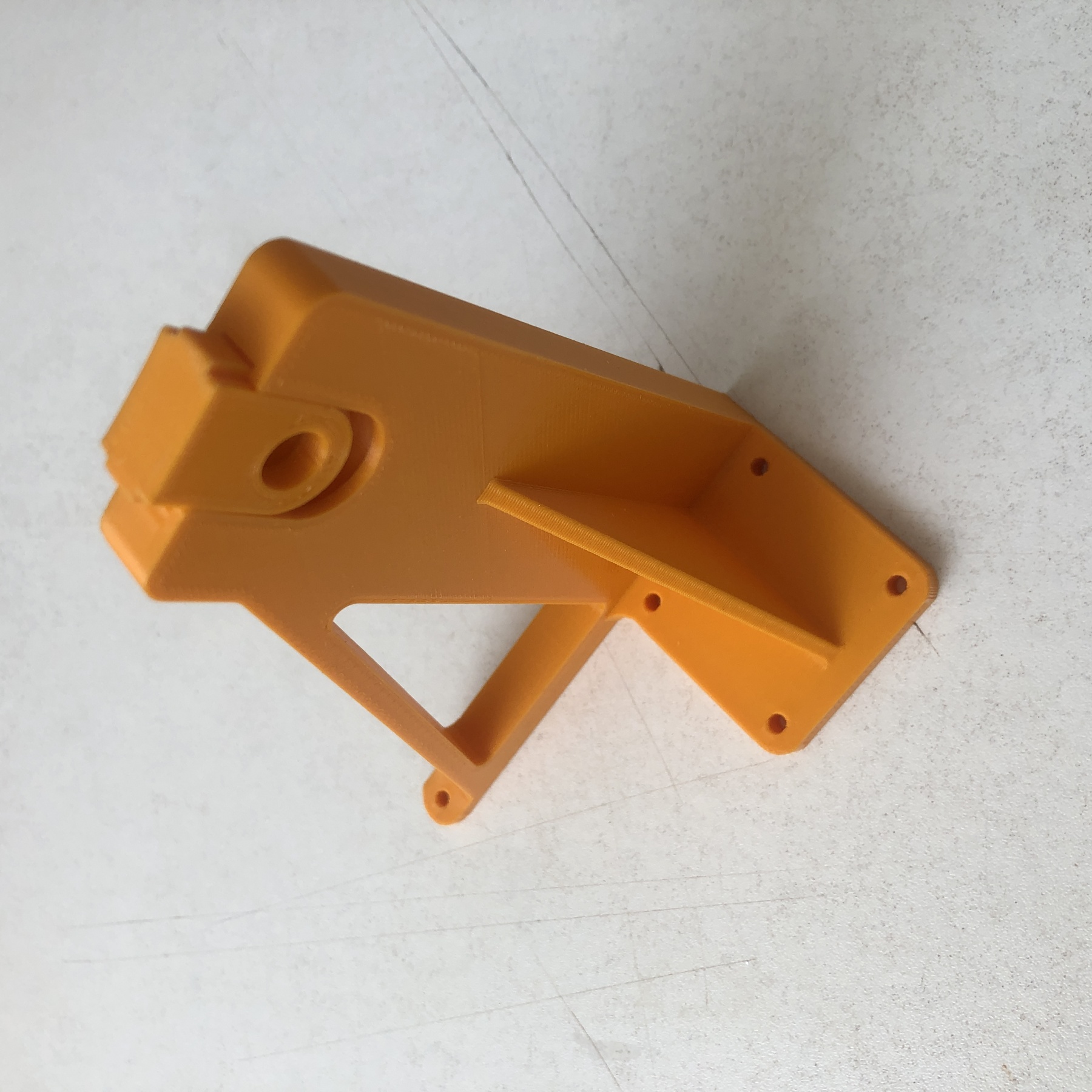 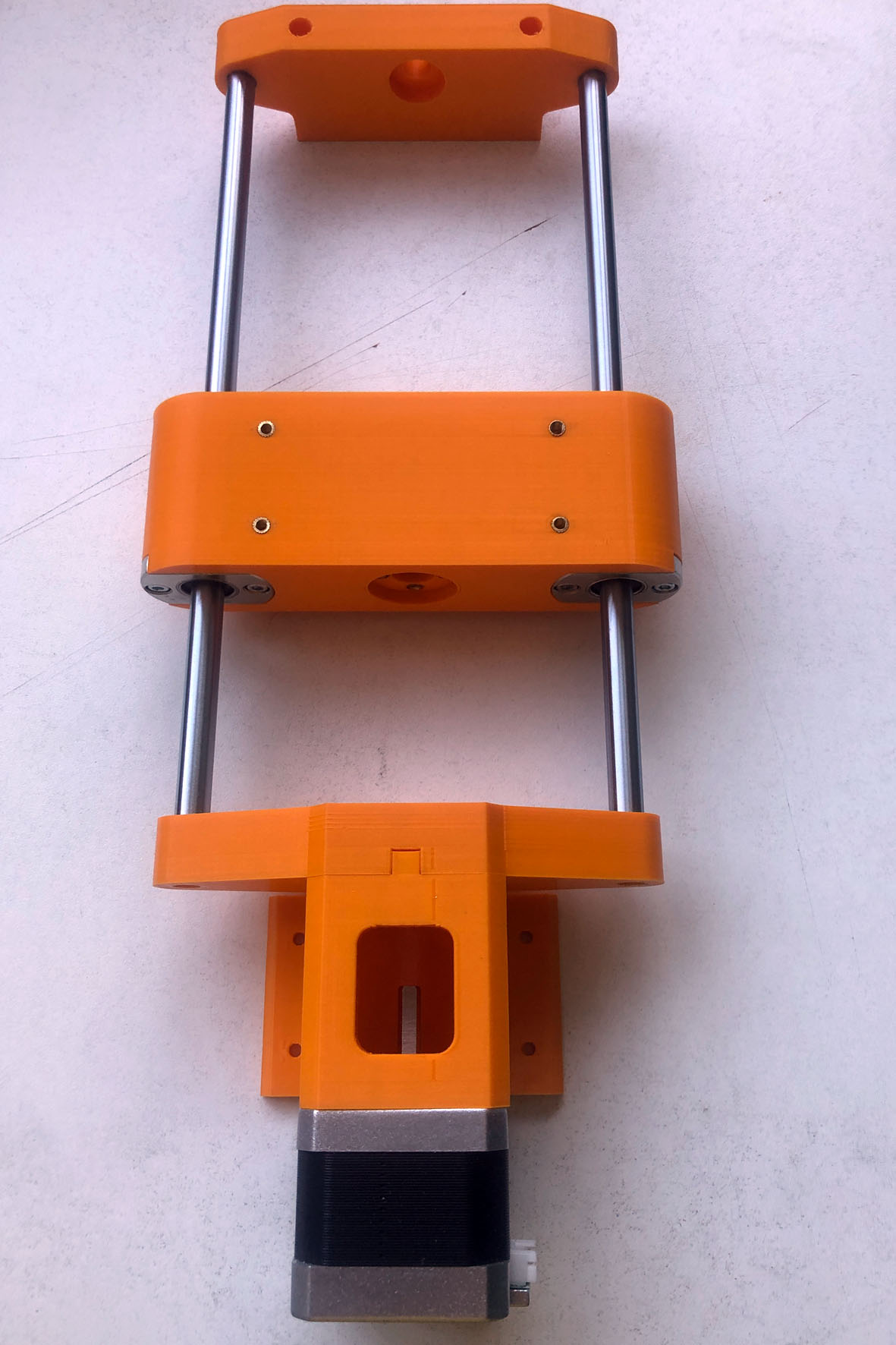  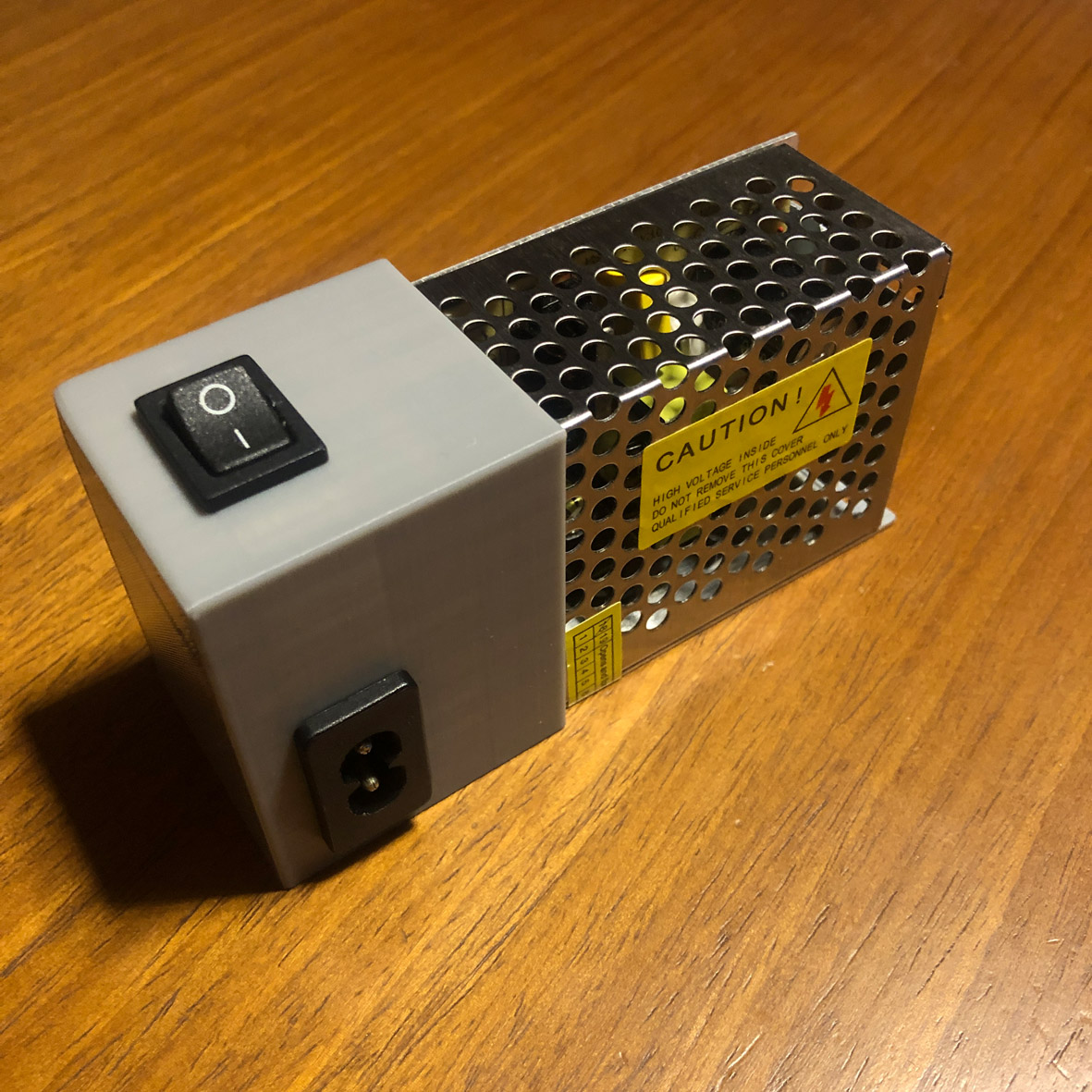  –ù–µ–±–æ–ª—å—à–æ–µ –≤–∏–¥–µ–æ —Ä–∞–±–æ—Ç—ã –º–µ–Ω—é. –°—Ö–µ–º–∞ –∏ –ø–ª–∞—Ç–∞ –≤ –î–∏–ø—Ç—Ä–µ–π—Å. https://yadi.sk/d/82CBeNBhTc0ViQ –§–∞–π–ª—ã –¥–ª—è –ø–µ—á–∞—Ç–∏ –¥–µ—Ç–∞–ª–µ–π —Å—Ç–∞–Ω–∫–∞. https://yadi.sk/d/eGrGMg6Lg9ePFw –ß–µ—Ä—Ç–µ–∂–µ–π –º–µ—Ç–∞–ª–ª–∏—á–µ—Å–∫–∏—Ö –¥–µ—Ç–∞–ª–µ–π —è –Ω–µ –¥–µ–ª–∞–ª, —Ç–æ—á–∏–ª –ø–æ –º–µ—Å—Ç—É. –ö–æ–≥–¥–∞ –Ω–∞–ø–µ—á–∞—Ç–∞—é –∫–æ—Ä–ø—É—Å, –¥–æ–±–∞–≤–ª—é –µ–≥–æ —Ñ–∞–π–ª—ã. –ù–æ–≤–∞—è —Å–∏—Å—Ç–µ–º–∞ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –æ–∫–∞–∑–∞–ª–∞—Å—å –≥–æ—Ä–∞–∑–¥–æ —É–¥–æ–±–Ω–µ–µ –≤–µ—Ä—Å–∏–∏ –Ω–∞ –ê—Ä–¥—É–∏–Ω–æ. –û–≥—Ä–æ–º–Ω–æ–µ —Å–ø–∞—Å–∏–±–æ –ê—Ä—Å–µ–Ω–∏—é –∑–∞ –µ–≥–æ —Ç—Ä—É–¥—ã!!! |
|
| –ê–≤—Ç–æ—Ä: | gsmart [ –í—Å —è–Ω–≤ 24, 2021 16:40:30 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–Ø–Ω, —Å—Ç–∞–Ω–æ–∫ –¥–ª—è –Ω–∞–º–æ—Ç–∫–∏ —Ç–æ—Ä–æ–≤ –Ω–µ –ø—Ä–æ–±—ã–≤–∞–ª–∏ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å? |
|
| –ê–≤—Ç–æ—Ä: | –Ø–Ω [ –í—Å —è–Ω–≤ 24, 2021 18:00:09 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–ù–µ—Ç –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏. –ó–∞—á–µ–º? –ü—Ä–æ—â–µ –∑–∞–∫–∞–∑–∞—Ç—å. –≠—Ç–æ—Ç —Å—Ç–∞–Ω–æ–∫ –¥–µ–ª–∞–ª—Å—è –¥–ª—è –∫–æ–Ω–∫—Ä–µ—Ç–Ω—ã—Ö –≤–æ—Å—å–º–∏ –º–∞–ª–µ–Ω—å–∫–∏—Ö –∫–∞—Ç—É—à–µ–∫ –¥–ª—è –æ–¥–Ω–æ–≥–æ –ø—Ä–æ–µ–∫—Ç–∞. –°–¥–µ–ª–∞—é, –∏ –≤ –¥–∞–ª—å–Ω–∏–π —É–≥–æ–ª —Å—Ç–∞–Ω–æ—á–µ–∫ –∑–∞–¥–≤–∏–Ω—É. |
|
| –ê–≤—Ç–æ—Ä: | Wladimir_TS [ –í—Å —è–Ω–≤ 24, 2021 19:13:08 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–•–æ—Ä–æ—à–∏–π –æ–¥–Ω–∞–∫–æ —É –¢–°–∞ 3D –ø—Ä–∏–Ω—Ç–µ—Ä - —Ç–∞–∫ —Ä–æ–≤–Ω–æ –Ω–∞–ø–µ—á–∞—Ç–Ω–æ. |
|
| –ê–≤—Ç–æ—Ä: | goldmen8 [ –í—Å —è–Ω–≤ 24, 2021 19:17:55 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–Ø–Ω, –∞ –∫–∞–∫ –¥–æ–ª–≥–æ –ø–µ—á–∞—Ç–∞–ª–∏—Å—å –¥–µ—Ç–∞–ª–∏ –∏ –∫–∞–∫–æ–π –ø–ª–∞—Å—Ç–∏–∫ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è. |
|
| –ê–≤—Ç–æ—Ä: | –Ø–Ω [ –í—Å —è–Ω–≤ 24, 2021 19:25:49 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–í—Å–µ –ø–æ—Ç–æ–º—É, —á—Ç–æ —Å–∞–º–æ–¥–µ–ª—å–Ω—ã–π. –ü–æ—Ö–≤–∞—Å—Ç–∞–ª—Å—è... 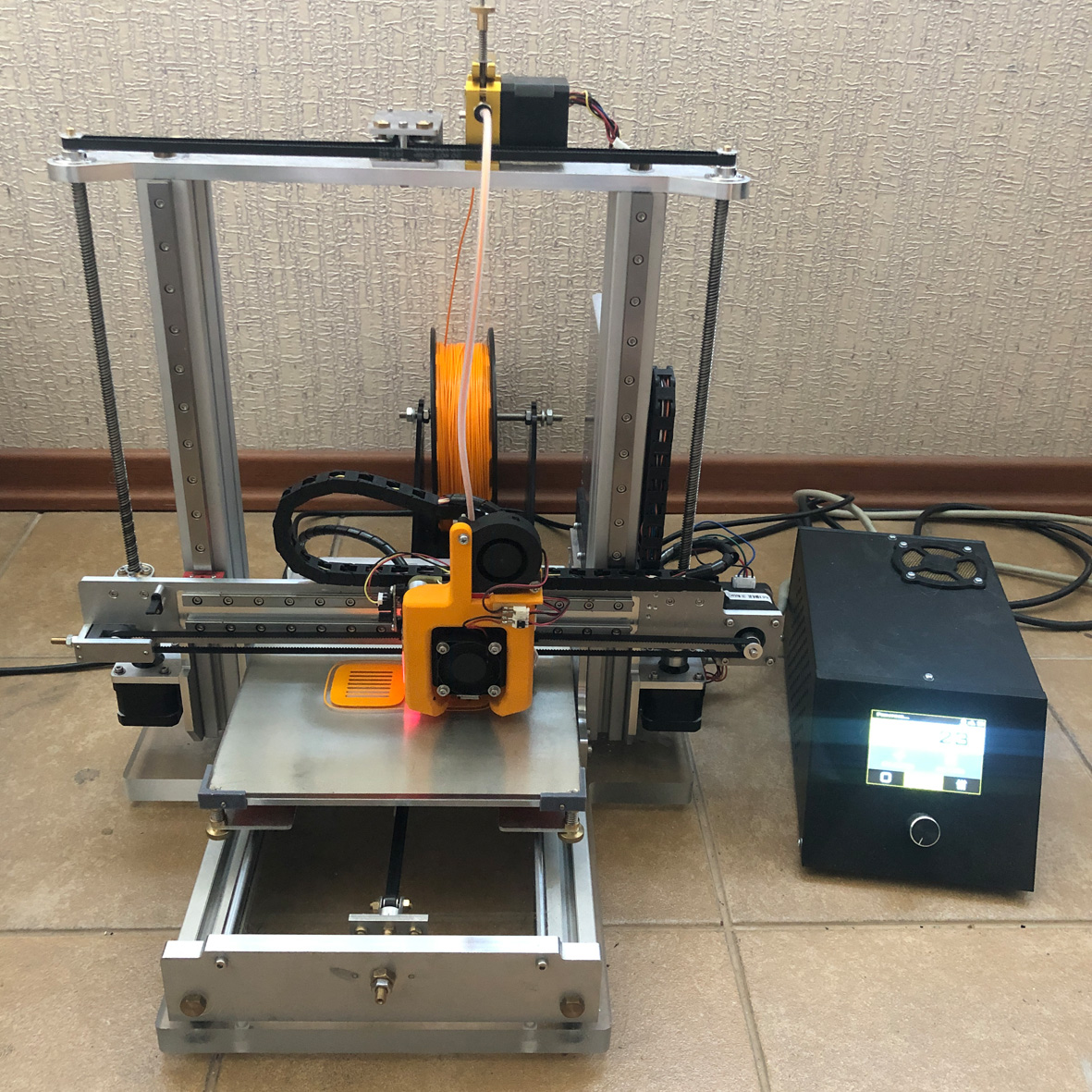 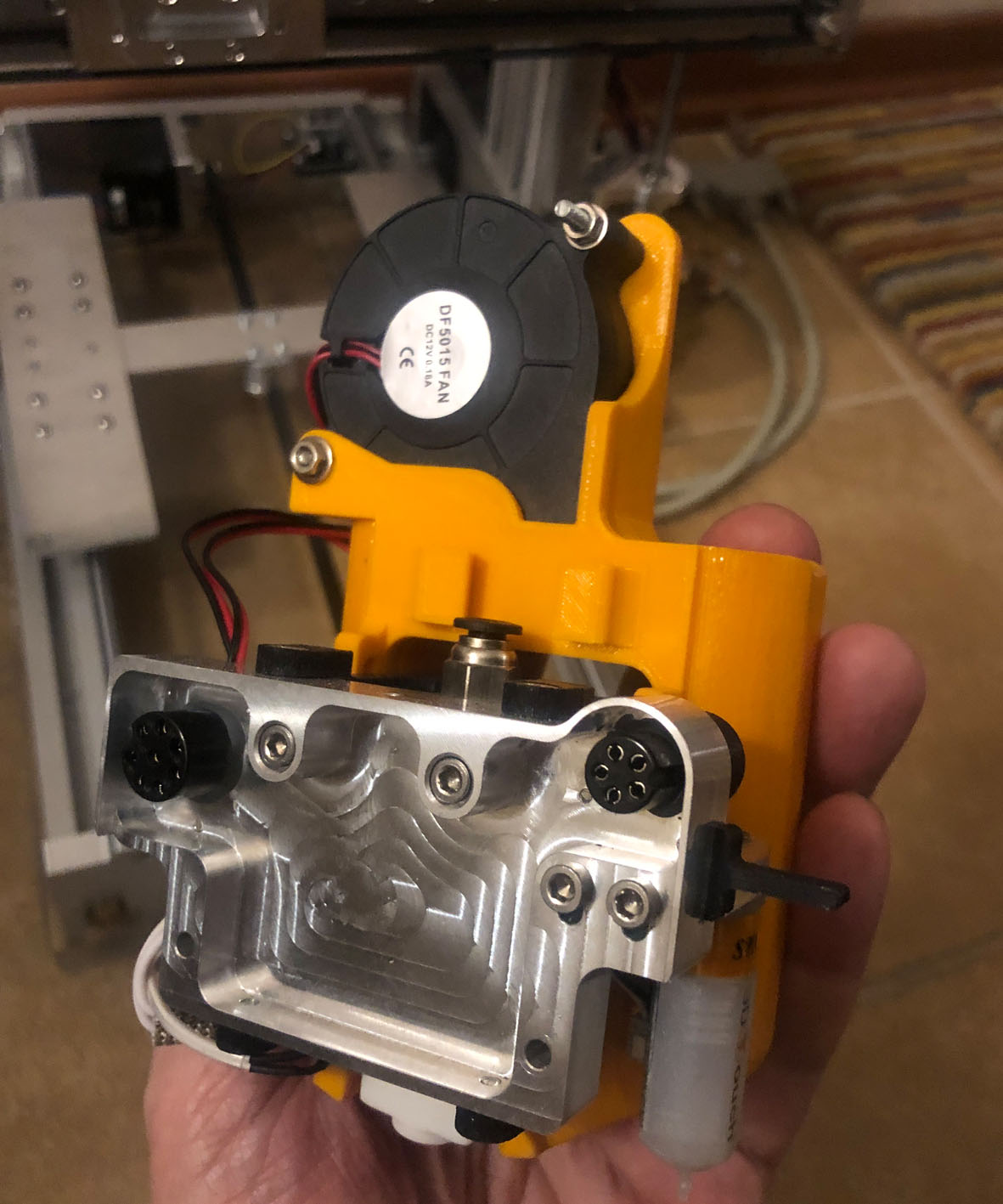 –ü–µ—á–∞—Ç–∞–ª PLA. –í—Ä–µ–º—è –Ω–µ –∑–∞—Å–µ–∫–∞–ª. |
|
| –ê–≤—Ç–æ—Ä: | Wladimir_TS [ –í—Å —è–Ω–≤ 24, 2021 22:03:35 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–ù—É –¥–∞ - —Ç–∞–º –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ —Å —Ü–µ–Ω–æ–π, –∫–∞–∫ –∫—Ä—ã–ª–æ –æ—Ç —Å–∞–º–æ–ª–µ—Ç–∞. –ù–µ –¥–ª—è –ø—Ä–æ—Å—Ç—ã—Ö –ª—é–¥–µ–π –∫–æ–Ω—Å—Ç—Ä—É–∫—Ç–∏–≤. –î—É–º–∞–ª –µ—Å—Ç—å –¥–µ—à–µ–≤—ã–µ –∏ —Å–µ—Ä–¥–∏—Ç—ã–µ —Ä–µ—à–µ–Ω–∏—è. –¢–∏–ø–∞ —É—Å–∏–ª–∏–π –Ω–∞ –≥–æ–ª–æ–≤–∫–µ –Ω–µ—Ç. –ê–Ω –Ω–µ—Ç - –∫–∞–∫ –∏ –æ–±—Ä–∞–±–∞—Ç—ã–≤–∞—é—â–∏–µ —Å–∏—Å—Ç–µ–º—ã —Ç—Ä–µ–±—É–µ—Ç –∂–µ—Å—Ç–∫–æ—Å—Ç–∏. –î—É–º–∞–ª –Ω–∞—á–∞—Ç—å —Å—Ç—Ä–æ–∏—Ç—å —Å–≤–æ–π (–∏–∑ –æ—Å—Ç–∞–Ω–∫–æ–≤ –º–∞—Ç—Ä–∏—á–Ω—ã—Ö –ø—Ä–∏–Ω—Ç–µ—Ä–æ–≤, –æ–¥–Ω—É –æ—Å—å —Å–¥–µ–ª–∞–ª) - –Ω–æ, –≤–∏–¥–∏–º–æ, –¥–ª—è –∫–∞—á–µ—Å—Ç–≤–µ–Ω–Ω–æ–π —Ä–∞–±–æ—Ç—ã –Ω—É–∂–Ω—ã —Å–ª–∏—à–∫–æ–º —É–∂ –ø—Ä–∏–ª–∏—á–Ω—ã–µ –≤–ª–æ–∂–µ–Ω–∏—è. –° –¥—Ä—É–≥–æ–π —Å—Ç–æ—Ä–æ–Ω—ã, –µ—Å–ª–∏ –≤—ã —Ç–∞–∫–∏–µ –¥–µ–Ω—å–≥–∏ –≤–±—É—Ö–∞–ª–∏ –≤ –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ, –Ω–æ –¥–æ —Å–∏—Ö –ø–æ—Ä —Ä–∞—Å—Ç—è–∂–∏–º—ã–µ —Ä–µ–º–Ω–∏ –ø–æ–ª—å–∑—É–µ—Ç–µ. –ò –∑–∞—á–µ–º 2 —ç–ª–µ–∫—Ç—Ä–æ–¥–≤–∏–≥–∞—Ç–µ–ª—è –Ω–∞ –≤–µ—Ä—Ç–∏–∫–∞–ª—å–Ω—É—é. –æ—Å—å, –µ—Å–ª–∏ –æ–Ω–∞ –∏ —Ç–∞–∫ —Å–æ–µ–¥–∏–Ω–µ–Ω–∞ —Ä–µ–º–Ω–µ–º –≤–≤–µ—Ä—Ö—É - –Ω–µ —Ç—è–Ω—É—Ç ? –Ø —Å–æ–±–∏—Ä–∞–ª—Å—è —Å—Ç–∞–≤–∏—Ç—å –æ–¥–∏–Ω. |
|
| –ê–≤—Ç–æ—Ä: | goldmen8 [ –ü–Ω —è–Ω–≤ 25, 2021 01:47:21 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–Ø–Ω –ø–∏—Å–∞–ª(–∞): –ø—Ä–æ–±–æ–≤–∞–ª –ø–µ—á–∞—Ç–∞—Ç—å –Ω–∞ –Ω–µ–º —Å–æ —Å–∫–æ—Ä–æ—Å—Ç—å—é 350–º–º/–º–∏–Ω. –í–µ—Å—å–º–∞ –Ω–æ—Ä–º–∞–ª—å–Ω–æ –ø–æ–ª—É—á–∏–ª–æ—Å—å. –û—á–µ–Ω—å –∂–µ—Å—Ç–∫–∏–π. 350–º–º/–º–∏–Ω —Ç–∞–∫ –º–µ–¥–ª–µ–Ω–Ω–æ? –∏–ª–∏ –æ–ø–µ—á–∞—Ç–∫–∞ –≤—ã—à–ª–∞. –£ –º–µ–Ω—è ender 3. —Å–∫–æ—Ä–æ—Å—Ç–∏ –¥–æ–ª–µ–µ 120–º–º/—Å –Ω–µ —Å—Ç–∞–≤–∏–ª, –æ—Å–æ–±–µ–Ω–Ω–æ –Ω–∞ –≤—ã—Å–æ–∫–∏—Ö –¥–µ—Ç–∞–ª—è—Ö, –∏–∑-–∑–∞ –æ—Å–æ–±–µ–Ω–Ω–æ—Å—Ç–µ–π —Ç–µ—Ö–Ω–æ–ª–æ–≥–∏–∏ "–¥—Ä—ã–≥ —Å—Ç–æ–ª–∞". –•–æ—á–µ—Ç—Å—è –ø–æ –±—ã—Å—Ç—Ä–µ–µ –∏ –ø–æ–ª—É—á–∏–ª–æ—Å—å-–±—ã, –Ω–æ —ç—Ç–æ—Ç —Å—Ç–æ–ª –µ–ª–æ–∑–∏—Ç —Ç—É–¥–∞-—Å—é–¥–∞, –∏ —á–µ–º –≤—ã—à–µ –ø–æ–¥–Ω–∏–º–∞–µ—Ç—Å—è —Ç–µ–º —Å–∏–ª—å–Ω–µ–µ "—Ä–∞–∑–¥—ë—Ä–≥–∏–≤–∞–µ—Ç" (—Ä—è–±–∏—Ç). –ü—Ä–∞–≤–¥–∞ –µ—â—ë –∫—Ä—ã—à–∫—É (–∫–æ—Ä–ø—É—Å) –Ω–µ –º–µ—à–∞–ª–æ –±—ã, –æ—Ç —Å–∫–≤–æ–∑–Ω—è–∫–æ–≤ –∑–∞–∫—Ä—ã—Ç—å—Å—è. –¢–æ–ª—å–∫–æ —ç—Ç–∏–º –∏ –Ω–µ –Ω—Ä–∞–≤–∏—Ç—Å—è, –∞ –≤—Å—ë –æ—Å—Ç–∞–ª—å–Ω–æ–µ –≤–ø–æ–ª–Ω–µ —É—Å—Ç—Ä–∞–∏–≤–∞–µ—Ç. –Ø–Ω, –∑–∞—á—ë—Ç–Ω—ã–π –∞–ø–ø–∞—Ä–∞—Ç!!!  –æ—Å–æ–±–µ–Ω–Ω–æ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω—ã–µ –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ. –æ—Å–æ–±–µ–Ω–Ω–æ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω—ã–µ –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ.
|
|
| –ê–≤—Ç–æ—Ä: | al1955 [ –ü–Ω —è–Ω–≤ 25, 2021 07:22:48 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–ü—Ä–æ–µ–∫—Ç –∏–Ω—Ç–µ—Ä–µ—Å–Ω—ã–π, –Ω–æ –∫–∞–∫ –æ–±—ã—á–Ω–æ —Å—Ç–∞–ª–æ –æ–±—Å—É–∂–¥–µ–Ω–∏–µ –Ω–µ –≤ —Ç–µ–º—É. –ü–æ–Ω—è—Ç–Ω–æ, —á—Ç–æ —Å—Ç–∞–Ω–æ–∫ –¥–µ–ª–∞–ª—Å—è –¥–ª—è —Ä–∞–∑–æ–≤–æ–≥–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –∏ –º–∞–ª–µ–Ω—å–∫–∏—Ö –∫–∞—Ç—É—à–µ–∫. –ï—Å—Ç—å –≤–æ–ø—Ä–æ—Å –∫ –∞–≤—Ç–æ—Ä—É. –ë—É–¥–µ—Ç –≤—Å–µ —Ç–∞–∫–∏ –≤–µ—Ä—Å–∏—è —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º –Ω–∞ –≤–∞–ª—É –¥–≤–∏–≥–∞—Ç–µ–ª—è ? –î—É–º–∞—é –≤ —ç—Ç–æ–º —Å–ª—É—á–∞–µ –º–æ–∂–Ω–æ –±—É–¥–µ—Ç –ø—Ä–∏–º–µ–Ω–∏—Ç—å –¥–≤–∏–≥–∞—Ç–µ–ª—å —Å —Ä–µ–¥—É–∫—Ç–æ—Ä–æ–º –∏ —É–≤–µ–ª–∏—á–∏—Ç—å –¥–∏–∞–º–µ—Ç—Ä –Ω–∞–º–∞—Ç—ã–≤–∞–µ–º–æ–≥–æ –ø—Ä–æ–≤–æ–¥–∞. |
|
| –ê–≤—Ç–æ—Ä: | Wladimir_TS [ –ü–Ω —è–Ω–≤ 25, 2021 07:35:12 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–ù–µ –∑–Ω–∞—é, —Å–∫–æ–ª—å–∫–æ –≤–ª–æ–∂–µ–Ω–æ, –ø—Ä–æ–µ–∫—Ç —Ç—è–Ω–µ—Ç—Å—è –ª–µ—Ç 5, –Ω–æ –ø–æ–∫–∞ –Ω–µ—Ç –Ω–∏ –≥–æ–ª–æ–≤–∫–∏, –Ω–∏ –º–µ—Ö–∞–Ω–∏–∑–º–∞ –ø–æ–¥–∞—á–∏, –µ—Å—Ç—å –º—ã—Å–ª—å –ø–µ—Ä–µ–¥–µ–ª—ã–≤–∞—Ç—å —ç—Ç–æ –≤ —É—Å—Ç–∞–Ω–æ–≤–∫—É –ø–æ –∑–∞—Å–≤–µ—Ç–∫–µ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞. –ê –∑–∞—Å—Ç–æ–ø–æ—Ä–∏–ª—Å—è –∞–∫–∫—É—Ä–∞—Ç –Ω–∞ –æ—Å–∏ Z - –∫–∞—Ä–µ—Ç–∫–∞ –≤–µ—Ä—Ç–∏–∫–∞–ª—å–Ω–∞—è –∫–ª–∏–Ω–∏—Ç, –Ω–∞–¥–æ —Å—Ç—Ä–æ–≥–æ —Å–∏–Ω—Ö—Ä–æ–Ω–∏–∑–∏—Ä–æ–≤–∞—Ç—å —Ö–æ–¥–æ–≤—ã–µ –≤–∏–Ω—Ç—ã, –Ω–æ –∫–∏—Ç–∞–π—Å–∫–∏–µ –≤–∏–Ω—Ç—ã –º–Ω–µ –∑–∞–ø–æ—Ä–æ–ª–∏ –ø—Ä–æ –æ–±—Ä–∞–±–æ—Ç–∫–µ –∫–æ–Ω—Ü–æ–≤ + –∫–æ–Ω—á–∏–ª–∞—Å—å –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –¥–æ–≥–æ–≤–∞—Ä–∏–≤–∞—Ç—å—Å—è –æ –∏–∑–≥–æ—Ç–æ–≤–ª–µ–Ω–∏–∏ –¥–µ—Ç–∞–ª–µ–π –Ω–∞ –ø—Ä–æ–∏–∑–≤–æ–¥—Å—Ç–≤–µ -–ø–æ—Å—Ç–∞–≤–∏–ª–∏ –Ω–æ–≤–æ–µ –Ω–∞—á–∞–ª—å—Å—Ç–≤–æ, –∫–æ—Ç–æ—Ä–æ–µ –∏–∑ –ø—Ä–∏–Ω—Ü–∏–ø–∞ –Ω–∞ –¥–∞–µ—Ç —Ä–∞–±–æ—á–∏–º –ø–æ–¥—Ö–∞–ª—Ç—É—Ä–∏–≤–∞—Ç—å. |
|
| –ê–≤—Ç–æ—Ä: | –Ø–Ω [ –ü–Ω —è–Ω–≤ 25, 2021 08:59:45 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–ù—É –¥–∞ - —Ç–∞–º –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ —Å —Ü–µ–Ω–æ–π, –∫–∞–∫ –∫—Ä—ã–ª–æ –æ—Ç —Å–∞–º–æ–ª–µ—Ç–∞. –ù–µ –¥–ª—è –ø—Ä–æ—Å—Ç—ã—Ö –ª—é–¥–µ–π –∫–æ–Ω—Å—Ç—Ä—É–∫—Ç–∏–≤. –î—É–º–∞–ª –µ—Å—Ç—å –¥–µ—à–µ–≤—ã–µ –∏ —Å–µ—Ä–¥–∏—Ç—ã–µ —Ä–µ—à–µ–Ω–∏—è. –¢–∏–ø–∞ —É—Å–∏–ª–∏–π –Ω–∞ –≥–æ–ª–æ–≤–∫–µ –Ω–µ—Ç. –ê–Ω –Ω–µ—Ç - –∫–∞–∫ –∏ –æ–±—Ä–∞–±–∞—Ç—ã–≤–∞—é—â–∏–µ —Å–∏—Å—Ç–µ–º—ã —Ç—Ä–µ–±—É–µ—Ç –∂–µ—Å—Ç–∫–æ—Å—Ç–∏. –î—É–º–∞–ª –Ω–∞—á–∞—Ç—å —Å—Ç—Ä–æ–∏—Ç—å —Å–≤–æ–π (–∏–∑ –æ—Å—Ç–∞–Ω–∫–æ–≤ –º–∞—Ç—Ä–∏—á–Ω—ã—Ö –ø—Ä–∏–Ω—Ç–µ—Ä–æ–≤, –æ–¥–Ω—É –æ—Å—å —Å–¥–µ–ª–∞–ª) - –Ω–æ, –≤–∏–¥–∏–º–æ, –¥–ª—è –∫–∞—á–µ—Å—Ç–≤–µ–Ω–Ω–æ–π —Ä–∞–±–æ—Ç—ã –Ω—É–∂–Ω—ã —Å–ª–∏—à–∫–æ–º —É–∂ –ø—Ä–∏–ª–∏—á–Ω—ã–µ –≤–ª–æ–∂–µ–Ω–∏—è. –° –¥—Ä—É–≥–æ–π —Å—Ç–æ—Ä–æ–Ω—ã, –µ—Å–ª–∏ –≤—ã —Ç–∞–∫–∏–µ –¥–µ–Ω—å–≥–∏ –≤–±—É—Ö–∞–ª–∏ –≤ –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ, –Ω–æ –¥–æ —Å–∏—Ö –ø–æ—Ä —Ä–∞—Å—Ç—è–∂–∏–º—ã–µ —Ä–µ–º–Ω–∏ –ø–æ–ª—å–∑—É–µ—Ç–µ. –ò –∑–∞—á–µ–º 2 —ç–ª–µ–∫—Ç—Ä–æ–¥–≤–∏–≥–∞—Ç–µ–ª—è –Ω–∞ –≤–µ—Ä—Ç–∏–∫–∞–ª—å–Ω—É—é. –æ—Å—å, –µ—Å–ª–∏ –æ–Ω–∞ –∏ —Ç–∞–∫ —Å–æ–µ–¥–∏–Ω–µ–Ω–∞ —Ä–µ–º–Ω–µ–º –≤–≤–µ—Ä—Ö—É - –Ω–µ —Ç—è–Ω—É—Ç ? –Ø —Å–æ–±–∏—Ä–∞–ª—Å—è —Å—Ç–∞–≤–∏—Ç—å –æ–¥–∏–Ω. –í—ã –Ω–∞–≤–µ—Ä–Ω–æ –Ω–µ –º–æ–Ω–∏—Ç–æ—Ä–∏–ª–∏ —Ü–µ–Ω—ã –Ω–∞ –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ. –î—É–º–∞—é –æ–Ω–∏ –æ–±–æ—à–ª–∏—Å—å –Ω–µ –¥–æ—Ä–æ–∂–µ 4 —Ç—ã—Å. –°–µ–π—á–∞—Å —Ç—Ä—É–¥–Ω–æ –≤—Å–ø–æ–º–Ω–∏—Ç—å, –∞ –≤ –∏—Å—Ç–æ—Ä–∏–∏ –Ω–∞ –ê–ª–∏ –ª–µ–Ω—å –∫–æ–ø–∞—Ç—å—Å—è. –≠—Ç–æ –¥–ª—è –ß–ü–£ –Ω–µ –¥–µ—à–µ–≤—ã–µ, —É –º–µ–Ω—è –Ω–∞ —Å—Ç–∞–Ω–æ–∫ –Ω–∞ 3 –æ—Å–∏ –æ–Ω–∏ –æ–±–æ—à–ª–∏—Å—å —Ç—ã—Å—è—á –≤ 18, –∏ —ç—Ç–æ –Ω–µ —Å–∞–º—ã–µ –¥–æ—Ä–æ–≥–∏–µ. –≠—Ç–æ—Ç –ø—Ä–∏–Ω—Ç–µ—Ä –æ–±–æ—à–µ–ª—Å—è –º–Ω–µ –ø—Ä–∏–º–µ—Ä–Ω–æ –≤ 30-35 —Ç—ã—Å. –ö–æ–Ω–µ—á–Ω–æ –º–Ω–æ–≥–æ–µ —è –¥–µ–ª–∞–ª —Å–∞–º, —É –º–µ–Ω—è –µ—Å—Ç—å —Ç–æ–∫–∞—Ä–Ω—ã–π —Å—Ç–∞–Ω–æ–∫. –¢–æ–ª—å–∫–æ —Ñ—Ä–µ–∑–µ—Ä–æ–≤–∫—É –Ω–∞ –ß–ü–£ –¥–µ–ª–∞–ª –Ω–∞ —Å—Ç–æ—Ä–æ–Ω–µ. –Ø —Å—á–∏—Ç–∞—é —á—Ç–æ —ç—Ç–æ –Ω–µ –±–µ—à–µ–Ω—ã–µ –¥–µ–Ω—å–≥–∏. –û—Å–æ–±–µ–Ω–Ω–æ –µ—Å–ª–∏ —Å—Ä–∞–≤–Ω–∏—Ç—å —Å —Ü–µ–Ω–∞–º–∏ –Ω–∞ –Ω–µ –±—é–¥–∂–µ—Ç–Ω—ã–µ –ø—Ä–∏–Ω—Ç–µ—Ä—ã. –Ý–µ–º–Ω–∏ –æ–±–µ—Å–ø–µ—á–∏–≤–∞—é—Ç –±—ã—Å—Ç—Ä–æ–µ –∏ –±–µ–∑–ª—é—Ñ—Ç–æ–≤–æ–µ –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏–µ. –£–∂–µ –≥–æ–¥ –ø—Ä–∏–Ω—Ç–µ—Ä—É, —Ä–µ–º–Ω–∏ –Ω–µ —Ä–∞—Å—Ç—è–Ω—É–ª–∏—Å—å. –ö —Ç–æ–º—É –∂–µ –µ—Å—Ç—å —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ –¥–ª—è –∏—Ö –Ω–∞—Ç—è–∂–µ–Ω–∏—è. 2 –¥–≤–∏–≥–∞—Ç–µ–ª—è –Ω–∞ Z –≥–æ—Ä–∞–∑–¥–æ –ª—É—á—à–µ, –Ω–µ—Ç –±–æ–ª—å—à–∏—Ö –Ω–∞–≥—Ä—É–∑–æ–∫ –Ω–∞ —Å–∏–Ω—Ö—Ä–æ–Ω–∏–∑–∏—Ä—É—é—â–∏–π —Ä–µ–º–µ–Ω—å. –û–Ω —Å–ª—É–∂–∏—Ç –ª–∏—à—å –¥–ª—è —Å–∏–Ω—Ö—Ä–æ–Ω–∏–∑–∞—Ü–∏–∏, –∞ –Ω–µ –¥–ª—è –ø–µ—Ä–µ–¥–∞—á–∏ —É—Å–∏–ª–∏—è. –°—Ç–∞–≤—å—Ç–µ 2 –Ω–∞ Z, –Ω–µ–±–æ–ª—å—à–∞—è —Ü–µ–Ω–∞ –∑–∞ —Å—Ç–∞–±–∏–ª—å–Ω—É—é —Ä–∞–±–æ—Ç—É. Wladimir_TS –ø–∏—Å–∞–ª(–∞): 350–º–º/–º–∏–Ω —Ç–∞–∫ –º–µ–¥–ª–µ–Ω–Ω–æ? –∏–ª–∏ –æ–ø–µ—á–∞—Ç–∫–∞ –≤—ã—à–ª–∞. –î–∞, –æ—à–∏–±—Å—è –∫–æ–Ω–µ—á–Ω–æ. –≤ —Å–µ–∫—É–Ω–¥—É. |
|
| –ê–≤—Ç–æ—Ä: | Wladimir_TS [ –ü–Ω —è–Ω–≤ 25, 2021 09:49:47 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–û–¥–∏–Ω–∞–∫–æ–≤—ã–µ –¥–≤–∏–∂–∫–∏ –Ω–∞–π—Ç–∏ —Å–ª–æ–∂–Ω–æ–≤–∞—Ç–æ. –ü—Ä–æ 4 —Ç—ã—Å—è—á–∏ –Ω–µ –≤–µ—Ä—é - —ç—Ç–æ –≤—Å–µ–≥–æ 2 –∫–∞—Ä–µ—Ç–∫–∏ –Ω–∞ —Å–∞–º—ã–π —É–∑–∫–∏–π —Ä–µ–ª—å—Å - 9 –º–º –ê –º–∏–Ω–∏–º—É–º –Ω–∞–¥–æ –ø–æ 3 –∫–∞—Ä–µ—Ç–∫–∏ –Ω–∞ –æ—Å—å, –∞ –ª—É—á—à–µ –ø–æ 4. + —Å–∞–º–∏ —Ä–µ–ª—å—Å—ã. –§—Ä–µ–∑–µ—Ä–æ–≤–∫–∞ –Ω–∞ –ß–ü–£ –±–µ–∑ –∑–Ω–∞–∫–æ–º—Å—Ç–≤–∞ - —Ç–∞–º –º–µ–Ω–µ–µ —á–µ–º –∑–∞ 30–∫ –¥–∞–∂–µ —Ä–∞–∑–≥–æ–≤–∞—Ä–∏–≤–∞—Ç—å –Ω–µ –±—É–¥—É—Ç (—Ö–æ—Ç–µ–ª –∫–æ—Ä–ø—É—Å –¥–ª—è –ò–ù–æ—à–Ω—ã—Ö —á–∞—Å–æ–≤ –∑–∞–∫–∞–∑–∞—Ç—å) - –ø—Ä–∏—á–µ–º –∫–∞–∫ –≤—Å–µ–≥–¥–∞ —Ä–æ—Å—Å–∏—è–Ω—Å–∫–æ–µ —Ö–∞–º—Å—Ç–≤–æ –∏ —Å–∫—Ä—ã—Ç–∞—è –Ω–µ–Ω–∞–≤–∏—Å—Ç—å –∫ –∫–∞–∂–¥–æ–º—É –∫–ª–∏–µ–Ω—Ç—É —Å –º–µ–ª–∫–∏–º –∑–∞–∫–∞–∑–æ–º.. |
|
| –ê–≤—Ç–æ—Ä: | goldmen8 [ –ü–Ω —è–Ω–≤ 25, 2021 10:25:49 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–°–∞–º—ã–π —É–∑–∫–∏–π —Ä–µ–ª—å—Å 7–º–º (MGN7,) 300–º–º + –æ–¥–Ω–∞ –∫–∞—Ä–µ—Ç–∫–∞ —Å—Ç–æ–∏—Ç –Ω–µ –±–æ–ª–µ–µ 800—Ä—É–±. —Å–∞–º–∞ –∫–∞—Ä–µ—Ç–∫–∞ 400. https://aliexpress.ru/item/100000748047 ... 0113926270 –Ø —Ç–∞–∫–∏–µ –≤–µ–∑–¥–µ –≤—Ç—ã–∫–∞—é –≥–¥–µ –≤–æ–∑–Ω–∏–∫–∞–µ—Ç –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å. –ë–æ–ª—å—à–µ –Ω—Ä–∞–≤–∏—Ç—Å—è —á–µ–º –∫—Ä—É–≥–ª—ã–µ –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ. Wladimir_TS –ø–∏—Å–∞–ª(–∞): –§—Ä–µ–∑–µ—Ä–æ–≤–∫–∞ –Ω–∞ –ß–ü–£ –±–µ–∑ –∑–Ω–∞–∫–æ–º—Å—Ç–≤–∞ - —Ç–∞–º –º–µ–Ω–µ–µ —á–µ–º –∑–∞ 30–∫ –¥–∞–∂–µ —Ä–∞–∑–≥–æ–≤–∞—Ä–∏–≤–∞—Ç—å –Ω–µ –±—É–¥—É—Ç (—Ö–æ—Ç–µ–ª –∫–æ—Ä–ø—É—Å –¥–ª—è –ò–ù–æ—à–Ω—ã—Ö —á–∞—Å–æ–≤ –∑–∞–∫–∞–∑–∞—Ç—å) ... –°–ø–æ–π–ª–µ—Ä–í–ª–æ–∂–µ–Ω–∏–µ: |
|
| –ê–≤—Ç–æ—Ä: | Wladimir_TS [ –ü–Ω —è–Ω–≤ 25, 2021 11:01:21 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–ö–æ—Ä–ø—É—Å –ø–æ–ø—Ä–æ—â–µ, –Ω–æ –Ω–µ –±–µ–∑ –∏–∑—ã—Å–∫–æ–≤. 6 —Ä–µ–ª—å—Å —É–∂–µ 5–∫ + 6 –¥–æ–ø–∫–∞—Ä–µ—Ç–æ–∫ - –≤ 4 —Ç—ã—Å—è—á–∏ –Ω–∏–∫–∞–∫. –° –∫—Ä—É–≥–ª—ã–º–∏ –∑–∞—Å–∞–¥–∞, —á—Ç–æ –≤ —à–∏—Ä–ø–æ—Ç—Ä–µ–±–µ –∫–∏—Ç–∞–π—Å–∫–æ–º –æ–Ω–∏ –Ω–µ –∫–∞–ª–µ–Ω—ã–µ –æ—Ç —Å–ª–æ–≤–∞ —Å–æ–≤—Å–µ–º, –Ω—É–∂–Ω–æ –æ—Ç —Å—Ç–∞—Ä—ã—Ö –æ—Ç–µ—á–µ—Å–∫–æ–π –ø—Ä–∏–Ω—Ç–µ—Ä–æ–≤. –ñ–µ–ª–∞—Ç–µ–ª—å–Ω–æ –æ—Ç —Ç–µ–ª–µ–≥—Ä–∞—Ñ–Ω—ã—Ö –∞–ø–ø–∞—Ä–∞—Ç–æ–≤ –≤—Ä–µ–º–µ–Ω –∑–∞–∫–∞—Ç–∞ –∏—Ö —Å—Ç—Ä–æ–µ–Ω–∏—è. - —Ç–∞–º –∫–∞–ª–µ–Ω—ã–π, –∞ –∫–∞—Ä–µ—Ç–∫–∏ –µ–∑–¥—è—Ç –Ω–∞ 6 –ø–æ–¥—à–∏–ø–Ω–∏–∫–∞—Ö –≤ 2—Ö –∑–æ–Ω–∞—Ö —Å–æ —Å–¥–≤–∏–≥–æ–º 120 –ø–æ —É–≥–ª—É, –æ–¥–∏–Ω –ø–æ–¥–ø–∏—Ä–∞–µ—Ç—Å—è –º–æ—â–Ω–æ–π –ø—Ä—É–∂–∏–Ω–æ–π - –≤–æ—Ç —ç—Ç–æ –¥–∞ - —Å—É—Ä–æ–≤–∞—è –≤–µ—â–∏—Ü–∞. –í–∞–ª –∫–∞–ª–µ–Ω ,–µ–≥–æ –Ω–µ –±–µ—Ä–µ—Ç –Ω–æ–∂–µ–≤–∫–∞ –ø–æ –º–µ—Ç–∞–ª–ª—É –æ—Ç —Å–ª–æ–≤–∞ –Ω–∏–∫–∞–∫. –¢–∞–∫ —á—Ç–æ –∑–∞–¥–∞—á–∞ –æ—Ç—Ä–µ–∑–∞–Ω–∏—è –∏ –∑–∞–∫—Ä–µ–ø–ª–µ–Ω–∏—è - –µ—â–µ —Ç–∞. –ñ–∞–ª–∫–æ –≤ —Å–≤–æ–µ –≤—Ä–µ–º—è –Ω–µ –Ω–∞—Ç–∞—Å–∫–∞–ª, –∫–æ–≥–¥–∞ –±—ã–ª–∞ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –∏—Ö –≤–¥–æ–≤–æ–ª—å. |
|
| –ê–≤—Ç–æ—Ä: | –Ø–Ω [ –ü–Ω —è–Ω–≤ 25, 2021 11:53:38 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
Wladimir_TS –ø–∏—Å–∞–ª(–∞): –ü—Ä–æ 4 —Ç—ã—Å—è—á–∏ –Ω–µ –≤–µ—Ä—é –ï—Å–ª–∏ –≤—ã –∑–∞–º–µ—Ç–∏–ª–∏, –Ω–∞ –º–æ–µ–º –ø—Ä–∏–Ω—Ç–µ—Ä–µ –ø–æ–∫–∞ 4 —Ä–µ–ª—å—Å–∞, –æ—Å—å —É –ø–æ–∫–∞ –Ω–∞ –∫—Ä—É–≥–ª—ã—Ö –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏—Ö. –¢–∞–∫ —á—Ç–æ –ø—Ä–æ 4 —Ç—ã—Å—è—á–∏ —è –ø–∏—Å–∞–ª –∏–º–µ—è –≤–≤–∏–¥—É —Å–≤–æ–π –ø—Ä–∏–Ω—Ç–µ—Ä. –§—Ä–µ–∑–µ—Ä—É—é –±–µ–∑ –∑–Ω–∞–∫–æ–º—Å—Ç–≤–∞, –Ω–∞—à–µ–ª —á–µ—Ä–µ–∑ —á–∏–ø–º–µ–π–∫–µ—Ä, —É–∂–µ –Ω–µ—Å–∫–æ–ª—å–∫–æ –ª–µ—Ç –ø–æ–ª—å–∑—É—é—Å—å. –ü—Ä–æ—Å—Ç–æ –≥–¥–µ —è —Ñ—Ä–µ–∑–µ—Ä—É—é, –Ω–µ —Ö–∞–ø—É–≥–∏. –î–ª—è –ø—Ä–∏–º–µ—Ä–∞. –î–µ–ª–∞—é —Å–µ–π—á–∞—Å –Ω–æ–≤—ã–π –ß–ü–£, —Ç–æ —á—Ç–æ –≤—ã –≤–∏–¥–∏—Ç–µ –Ω–∞ —Ñ–æ—Ç–∫–µ –º–Ω–µ –æ—Ç—Ñ—Ä–µ–∑–µ—Ä–æ–≤–∞–ª–∏ –∑–∞ 10—Ç—ã—Å. –ú–∞—Ç–µ—Ä–∏–∞–ª –º–æ–π, –µ—â–µ 3500. –Ý–∞–∑–≤–µ —ç—Ç–æ –¥–æ—Ä–æ–≥–æ? –î—É–º–∞—é –≤—Å–µ —Ñ—Ä–µ–∑–µ—Ä–Ω—ã–µ —Ä–∞–±–æ—Ç—ã –∑–∞ —Å—Ç–∞–Ω–æ–∫ –æ–±–æ–π–¥—É—Ç—Å—è –≤ 30 —Ç—ã—Å. –ü–ª—é—Å –º–∞—Ç–µ—Ä–∏–∞–ª 13. –¢–∞–∫–æ–≥–æ –∫–∞—á–µ—Å—Ç–≤–∞ –∑–∞ —ç—Ç–∏ –¥–µ–Ω—å–≥–∏ –Ω–∞ –ê–ª–∏ –Ω–µ –∫—É–ø–∏—Ç—å, —è —Ç–æ –∑–Ω–∞—é, –Ω–µ –∑—Ä—è –¥–µ–ª–∞—é –Ω–æ–≤—ã–π –≤–º–µ—Å—Ç–æ –º–æ–µ–≥–æ –∫–∏—Ç–∞–µ–∑—ã. 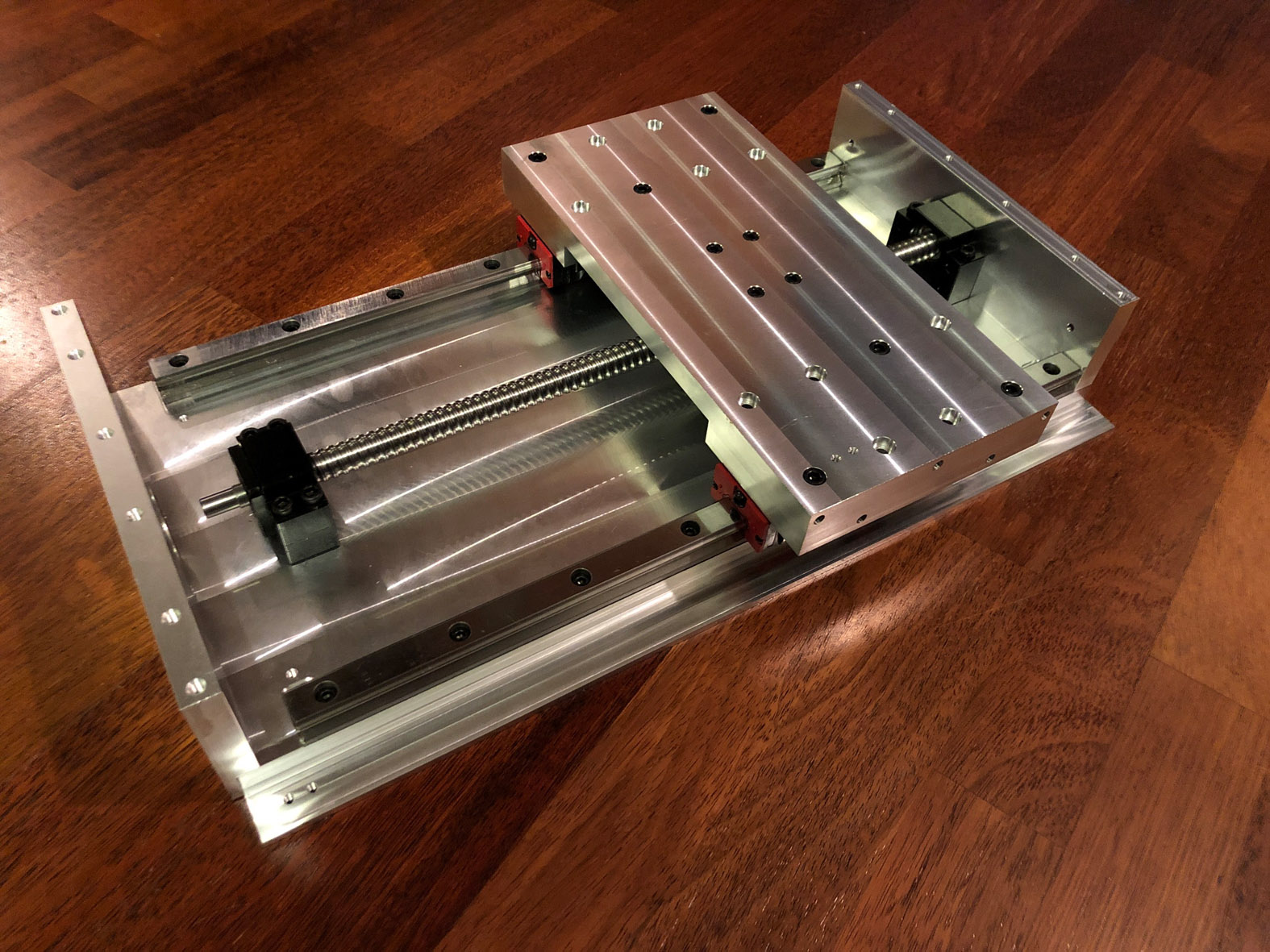 –ö—Ä—É–≥–ª—ã–µ –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ —è –ø–æ–∫—É–ø–∞–ª —Ç—É—Ç. –ù–æ—Ä–º–∞–ª—å–Ω–æ –∑–∞–∫–∞–ª–µ–Ω—ã, —Ü–µ–Ω–∞ –ø—Ä–∏–µ–º–ª–µ–º–∞. –ù–æ–∂–µ–≤–∫–æ–π —Ç–∞–∫–∏–µ –≤–∞–ª—ã –Ω–∏–∫—Ç–æ –Ω–µ –ø–∏–ª–∏—Ç, –µ—Å—Ç—å –±–æ–ª–≥–∞—Ä–∫–∞. –¢–µ–º–∞ –ø–ª–∞–≤–Ω–æ –ø–µ—Ä–µ—Ç–µ–∫–ª–∞ –æ—Ç –Ω–∞–º–æ—Ç–æ—á–Ω–æ–≥–æ —Å—Ç–∞–Ω–∫–∞ –≤ 3D –ø—Ä–∏–Ω—Ç–µ—Ä—ã... –ê —è –ø—Ä–æ–¥–æ–ª–∂–∞—é –µ–≥–æ –¥–æ–¥–µ–ª—ã–≤–∞—Ç—å. –ù–∞—Ä–∏—Å–æ–≤–∞–ª –∫–æ—Ä–ø—É—Å, –Ω–æ –ø–æ—è–≤–∏–ª–∞—Å—å –Ω–æ–≤–∞—è –∏–¥–µ—è –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –µ–≥–æ. –î–∞, –∫—Å—Ç–∞—Ç–∏, —Ä–∞–∑ –≤–æ–∑–Ω–∏–∫–ª–∞ —Ç–µ–º–∫–∞ –ø—Ä–æ —á–∞—Å—ã –Ω–∞ –ò–ù–∫–∞—Ö. –≠—Ç–æ –º–æ–µ –æ—Å–Ω–æ–≤–Ω–æ–µ —Ö–æ–±–±–∏, –≤—Å–µ —á—Ç–æ —è –¥–µ–ª–∞—é –∏–∑ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏—è, –¥–µ–ª–∞–µ—Ç—Å—è –≤ —Ç–æ–º —á–∏—Å–ª–µ –∏ –¥–ª—è —ç—Ç–æ–≥–æ. |
|
| –ê–≤—Ç–æ—Ä: | Wladimir_TS [ –ü–Ω —è–Ω–≤ 25, 2021 12:01:42 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ê–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏–π –Ω–∞–º–æ—Ç–æ—á–Ω—ã–π —Å—Ç–∞–Ω–æ–∫ |
–ö–æ–º—É - –∫–∞–∫...–º–Ω–µ –¥–æ—Ä–æ–≥–æ. –î–∞ –∏ –æ–ø—è—Ç—å - –≤–æ—Ç —É –≤–∞—Å –µ—Å—Ç—å –¥–æ—Å—Ç—É–ø (–≥–¥–µ –∂–∏–≤–µ—Ç–µ.....–∞–≥–∞) –≥–¥–µ —Ñ—Ä–µ–∑–µ—Ä—É—é—Ç –∑–∞ —Å—Ç–æ–ª—å–∫–æ, —É –º–µ–Ω—è –Ω–µ—Ç (—Ç–æ—á–Ω–µ–µ –µ—Å—Ç—å - –Ω–æ –∑–∞–º–µ—Ç–Ω–æ –∑–∞ –±–æ–ª—å—à–µ –∏ —ç—Ç–æ –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω–æ–µ –º–µ—Å—Ç–æ –¥–æ—Å—Ç—É–ø–Ω–æ–µ –≤ —Ä–∞–¥–∏—É—Å–µ 100 –∫–º). –£ –≤—Å–µ—Ö —Å–≤–æ–∏ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–∏. –û–¥–Ω–∞ –®–í–ü –Ω–∞ –≤–∞—à–µ–º —Ñ–æ—Ç–æ —Å–∫–æ–ª—å–∫–æ —Å—Ç–æ–∏—Ç ???? –ò –Ω–µ–±–æ—Å—å —Å—Ç–∞–≤–∏—Ç—å —É–∂–µ –Ω–µ —à–∞–≥–æ–≤—ã–π –±—É–¥–µ—Ç–µ, –∞ –ø–æ–ª–Ω–æ—Ü–µ–Ω–Ω—ã–π —Å–µ—Ä–≤–æ–¥–≤–∏–≥–∞—Ç–µ–ª—å. –° –¥—Ä—É–≥–æ–π —Å—Ç–æ—Ä–æ–Ω—ã —É –≤–∞—Å –≤–∏–¥–∏–º–æ —É–∂–µ –ø—Ä–æ–∏–∑–≤–æ–¥—Å—Ç–≤–æ —á–∞—Å–æ–≤, –∞ —ç—Ç–æ —É–∂–µ —Ä–∞–±–æ—Ç–∞ –∏ —Ç—É—Ç –≤ –ø—Ä–æ–∏–∑–≤–æ–¥—Å—Ç–≤–æ –Ω–∞–¥–æ –≤–∫–ª–∞–¥—ã–≤–∞—Ç—å—Å—è. –ó–∞—Ç—Ä–∞—Ç—ã –æ—Ç–æ–±—å—é—Ç—Å—è –ø—Ä–∏–±—ã–ª—å—é. |
|
| –°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 16 | –ß–∞—Å–æ–≤–æ–π –ø–æ—è—Å: UTC + 3 —á–∞—Å–∞ |
| Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group http://www.phpbb.com/ |
|