


| –§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç https://radiokot.ru/forum/ |
|
| –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º https://radiokot.ru/forum/viewtopic.php?f=2&t=101844 |
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 125 |
| –ê–≤—Ç–æ—Ä: | BV-Dial [ –í—Ç –º–∞—Ä 18, 2014 15:15:12 ] | ||||||
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º | ||||||
–ù–∞ –Ω–∞—à–µ–º —Å–∞–π—Ç–µ —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–Ω—ã 6(—à–µ—Å—Ç—å) –ø—Ä–µ–≤–æ—Å—Ö–æ–¥–Ω—ã—Ö –ø–∞—è–ª—å–Ω—ã—Ö —Å—Ç–∞–Ω—Ü–∏–π.–°–∞–º —Å–æ–±—Ä–∞–ª 3 —Ä–∞–∑–Ω—ã—Ö - –≤—Å–µ –ø—Ä–µ–∫—Ä–∞—Å–Ω–æ —Ä–∞–±–æ—Ç–∞—é—Ç.–í—Å–µ 6 —Å—Ç–∞–Ω—Ü–∏–π –∏—Å–ø–æ–ª—å–∑—É—é—Ç –ø–∞—è–ª—å–Ω–∏–∫ Hakko-907 –∏–ª–∏ –µ–≥–æ –∫–∏—Ç–∞–π—Å–∫–∏–µ –∫–æ–ø–∏–∏,—Å –µ–≥–æ –¥–æ—Å—Ç–æ–∏–Ω—Å—Ç–≤–∞–º–∏ (–º–∞–ª–∞—è —Å—Ç–æ–∏–º–æ—Å—Ç—å,–±–æ–ª—å—à–æ–π –≤—ã–±–æ—Ä –∂–∞–ª,–¥–æ—Å—Ç—É–ø–Ω–æ—Å—Ç—å) –∏ –Ω–µ–¥–æ—Å—Ç–∞—Ç–∫–∞–º–∏ (–≤—Å–µ –ø—Ä–æ –Ω–∏—Ö –∑–Ω–∞—é—Ç). –î–∞–≤–Ω–æ –±—ã–ª–∞ –º–µ—á—Ç–∞ –ø—Ä–∏—Å–ø–æ—Å–æ–±–∏—Ç—å –ø–∞—è–ª—å–Ω–∏–∫ —Å –º–æ–Ω–æ–ª–∏—Ç–Ω—ã–º –∂–∞–ª–æ–º,–≥–¥–µ –Ω–∞–≥—Ä–µ–≤–∞—Ç–µ–ª—å –∏ –∂–∞–ª–æ –Ω–∞—Ö–æ–¥—è—Ç—Å—è –≤ –æ–¥–Ω–æ–º –∫–æ—Ä–ø—É—Å–µ.–ß–∏—Ç–∞—è –≤–µ—Ç–∫—É —Ñ–æ—Ä—É–º–∞ (–¶–∏—Ñ—Ä–æ–≤–∞—è –ø–∞—è–ª—å–Ω–∞—è —Å—Ç–∞–Ω—Ü–∏—è —Å–≤–æ–∏–º–∏ —Ä—É–∫–∞–º–∏.(V 2.0)) –æ–±–Ω–∞—Ä—É–∂–∏–ª —á—Ç–æ Victor_P. –≤ –ø—Ä–æ—à–∏–≤–∫–µ 1.4 —Å–¥–µ–ª–∞–ª –∑–∞–º–µ—Ä—ã —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –≤ –ø–∞—É–∑–∞—Ö –Ω–∞–≥—Ä–µ–≤–∞. –¢–æ —á—Ç–æ –Ω–∞–¥–æ. –õ–µ–≥–∫–∞—è –∞–¥–∞–ø—Ç–∞—Ü–∏—è —Å—Ö–µ–º—ã Victor_P. –ø–æ–∑–≤–æ–ª–∏–ª–∞ –ø–æ–¥–∫–ª—é—á–∏—Ç—å –ø–∞—è–ª—å–Ω–∏–∫ Hakko FM-2028 (–≤–µ—Ä–Ω–µ–µ –µ–≥–æ –∫–∏—Ç–∞–π—Å–∫—É—é –∫–æ–ø–∏—é) –∏—Å–ø–æ–ª—å–∑—É—é—â–∏–µ –∫–∞—Ç—Ä–∏–¥–∂–∏ –¢12 –∏–ª–∏ –¢15.–ü—Ä–æ—à–∏–≤–∫–∞ –ø–æ—Å–ª–µ–¥–Ω—è—è –æ—Ç Victor_P. 1.42beta ( —Å —ç—Ç–æ–π –ø—Ä–æ—à–∏–≤–∫–æ–π IMHO –±—É–¥–µ—Ç –∏ —Ä–∂–∞–≤—ã–π –≥–≤–æ–∑–¥—å –ø–∞—è—Ç—å –µ—Å–ª–∏ –µ–≥–æ –ø—Ä–∞–≤–∏–ª—å–Ω–æ –∑–∞–ø—Ä–æ–≥—Ä–∞–º–∏—Ä–æ–≤–∞—Ç—å).–ù–∞—Å—Ç—Ä–æ–π–∫–∏ –ü–ò–î —Å–ª–µ–¥—É—é—â–∏–µ –Ý-10,I-99,D-10,U-95. –¢–µ–º–ø–µ—Ä–∞—Ç—É—Ä—É —Å –∂–∞–ª–æ–º –¢12-BCF3 –¥–æ 280 —Å —É—á–µ—Ç–æ–º —Å–æ—Ñ—Ç-—Å—Ç–∞—Ä—Ç–∞ –Ω–∞–±–∏—Ä–∞–µ—Ç –∑–∞ 17 —Å–µ–∫—É–Ω–¥,—Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—É –¥–µ—Ä–∂–∏—Ç –ø–ª—é—Å-–º–∏–Ω—É—Å 1 –≥—Ä–∞–¥—É—Å, –ø—Ä–∏ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä–µ 280 –≥—Ä –ø—Ä–∏ –ø–∞–π–∫–µ –ø–æ–ª–∏–≥–æ–Ω–∞ 2 –Ω–∞ 3 —Å–º –ø—Ä–æ—Å–∞–¥–∫–∞ —Å–æ—Å—Ç–∞–≤–ª—è–µ—Ç 3 ..4 –≥—Ä–∞–¥—É—Å–∞ –∏ —Ç—É—Ç –∂–µ –¥–æ–±–∏—Ä–∞–µ—Ç –¥–æ 280 ,–∫–∞–∫ —Ç–æ–ª—å–∫–æ —É–±–∏—Ä–∞—é –∂–∞–ª–æ –æ—Ç –ø–æ–ª–∏–≥–æ–Ω–∞ –ø–æ–¥—å–µ–º –Ω–∞ 2 –≥—Ä–∞–¥—É—Å–∞ –∏ —Ç—É—Ç –∂–µ –≤–æ–∑–≤—Ä–∞—â–µ–Ω–∏–µ –∫ –∑–∞–¥–∞–Ω–Ω–æ–π.–ü—Ä–∏—Å—É—Ç—Å—Ç–≤—É–µ—Ç –Ω–µ–±–æ–ª—å—à–æ–π –∑–∞–±–µ–≥ –ø—Ä–∏ –Ω–∞–≥—Ä–µ–≤–µ –æ—Ç –∫–æ–º–Ω–∞—Ç–Ω–æ–π(20) –¥–æ —Ä–∞–±–æ—á–µ–π(280) –Ω–∞ 6..7 –≥—Ä–∞–¥—É—Å–æ–≤ –Ω–æ –≤ —Ç–µ—á–µ–µ–Ω–∏–∏ 3 —Å–µ–∫ –ø—Ä–∏—Ö–æ–¥–∏—Ç –≤ –Ω–æ—Ä–º—É.
|
|||||||
| –ê–≤—Ç–æ—Ä: | –ú—É—Ä–∫–æ—Ç [ –ü—Ç –º–∞—Ä 21, 2014 22:42:56 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–°—Ç—Ä–∞–Ω–Ω–æ, –Ω–µ—É–∂–µ–ª–∏ –Ω–∏–∫–æ–º—É –Ω–µ–∏–Ω—Ç–µ—Ä–µ—Å–Ω–∞ —ç—Ç–∞ —Ç–µ–º–∞...  –í–µ–¥—å –≤–µ—â—å-—Ç–æ –¥–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ —Å—Ç–æ—è—â–∞—è. –í–µ–¥—å –≤–µ—â—å-—Ç–æ –¥–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ —Å—Ç–æ—è—â–∞—è.
|
|
| –ê–≤—Ç–æ—Ä: | kuchar [ –í—Å –º–∞—Ä 23, 2014 23:24:49 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–ù–∞–≤–µ—Ä–Ω–æ–µ –≤—Å–µ –æ–±–∏—Ç–∞—é—Ç –≤ –æ—Å–Ω–æ–≤–Ω–æ–π —Ç–µ–º–µ... |
|
| –ê–≤—Ç–æ—Ä: | Panda_Y2K [ –í—Å –º–∞—Ä 23, 2014 23:49:00 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–î–∞, —Ç–µ–º–∞ –∏–Ω—Ç–µ—Ä–µ—Å–Ω–∞—è, —É –º–µ–Ω—è –ø–∞—è–ª—å–Ω–∏–∫ Goot, –¥—É–º–∞—é —Ç–∞–º —Ç–æ–∂–µ, —á—Ç–æ —Ç–æ –ø–æ—Ö–æ–∂–µ–µ –º–æ–∂–Ω–æ —Å–¥–µ–ª–∞—Ç—å. –¢–∞–º —Ç–æ–∂–µ —Å—Ç–æ–∏—Ç —Ç–µ—Ä–º–æ—ç–ª–µ–º–µ–Ω—Ç, —Ç–∞–∫, —á—Ç–æ –≤ –ø–∞—É–∑–∞—Ö –º–µ–∂–¥—É –Ω–∞–≥—Ä–µ–≤–æ–º –º–æ–∂–Ω–æ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –º–µ—Ä–∏—Ç—å —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—É. |
|
| –ê–≤—Ç–æ—Ä: | BV-Dial [ –°—Ä –∞–ø—Ä 16, 2014 13:05:17 ] | ||
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º | ||
–ü—Ä–æ–≤–µ–ª –ø–æ–≤–µ—Ä–∫—É –≤—Å–µ—Ö —Å–≤–æ–∏—Ö –∫–∞—Ç—Ä–∏–¥–∂–µ–π.–í—Å–µ –∂–∞–ª–∞ –∏–º–µ—é—Ç –ª–∞–∑–µ—Ä–Ω—É—é –≥—Ä–∞–≤–∏—Ä–æ–≤–∫—É HAKKO(–ø–æ—Ö–æ–∂–µ –Ω–∞ –Ω–∞—Å—Ç–æ—è—â–∏–µ). –ë—Ä–∞–ª –ø–æ 250 —Ä—É–±–ª–µ–π . –Ý–µ–∑—É–ª—å—Ç–∞—Ç –≤ —Ç–∞–±–ª–∏—á–∫–µ.
|
|||
| –ê–≤—Ç–æ—Ä: | dmirrr [ –ü—Ç –∞–ø—Ä 18, 2014 09:41:09 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–ú—É—Ä–∫–æ—Ç –ø–∏—Å–∞–ª(–∞): –°—Ç—Ä–∞–Ω–Ω–æ, –Ω–µ—É–∂–µ–ª–∏ –Ω–∏–∫–æ–º—É –Ω–µ–∏–Ω—Ç–µ—Ä–µ—Å–Ω–∞ —ç—Ç–∞ —Ç–µ–º–∞... –¢–µ–º–∞, —Ç–æ –∏–Ω—Ç–µ—Ä–µ—Å–Ω–∞, –Ω–æ —Å–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è –Ω–µ–±–æ–ª—å—à–∞—è —Ä–∞—Å–ø—Ä–æ—Å—Ç—Ä–∞–Ω–µ–Ω–Ω–æ—Å—Ç—å —É–∫–∞–∑–∞–Ω–Ω–æ–≥–æ –ø–∞—è–ª—å–Ω–∏–∫–∞. –ö–ª–æ–Ω—ã Hakko-907 –≤ –∫–∞–∂–¥–æ–º –º–∞–≥–∞–∑–∏–Ω–µ –ø—Ä–æ–¥–∞—é—Ç—Å—è –ø–æ –¥–µ–º–æ–∫—Ä–∞—Ç–∏—á–Ω–æ–π —Ü–µ–Ω–µ, –∞ FM-2028 –Ω–µ—Ç, –Ω—É–∂–Ω–æ –≤ –ö–∏—Ç–∞–µ –ø–æ–∫—É–ø–∞—Ç—å. –ê —Ç–∞–∫, —Ç–æ –∑–∞ –∫–æ—Ä–ø—É—Å +. –°–∞–º–æ–¥–µ–ª—å–Ω—ã–π —Å –º–µ—Ç–∞–ª–∞ –Ω–µ –ø—Ä–æ—Å—Ç–æ –Ω–∞ –∫–æ–ª–µ–Ω–∫–µ —Å–¥–µ–ª–∞—Ç—å.
|
|
| –ê–≤—Ç–æ—Ä: | serg_svd [ –ü–Ω –º–∞–π 05, 2014 14:31:19 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–û—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –Ω–µ–¥–∞–≤–Ω–æ —É–∑–Ω–∞–ª –ø—Ä–æ –∂–∞–ª–∞ –¢12. –ó–∞–∏–Ω—Ç—Ä–∏–≥–æ–≤–∞–Ω. –•–æ—á–µ—Ç—Å—è –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å. –ù–∞–≤–µ—Ä–Ω–æ–µ –±—É–¥—É –∑–∞–∫–∞–∑—ã–≤–∞—Ç—å –ø–∞—è–ª—å–Ω–∏–∫ —É –∫–∏—Ç–∞–π—Ü–µ–≤. –ö–∞–∫–æ–π –ª—É—á—à–µ –≤–∑—è—Ç—å, —Ä–∞–∑–±–æ—Ä–Ω—ã–π FM-2028 –∏–ª–∏ –∂–µ FX-9051? PS. –∫—Å—Ç–∞—Ç–∏ –¥–æ–±–∞–≤–ª—é –µ—â–µ –ø–∞—Ä—É —Å—Å—ã–ª–æ–∫ —Å–æ —Å—Ö–µ–º–∞–º–∏ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–≤ –∫ –¥–∞–Ω–Ω–æ–º—É —Ç–∏–ø—É –ø–∞—è–ª—å–Ω–∏–∫–∞ —Å –ø—Ä–æ—Å—Ç–æ—Ä–æ–≤ –∏–Ω—Ç–µ—Ä–Ω–µ—Ç–∞ http://radio.aliot.com.ua/?p=945 –∏ http://ired.ucoz.ru/news/kontroller_pajalnika_hakko_fm_2028/2013-09-26-6 –í–µ—Ä—Å–∏—è –ø—Ä–æ—à–∏–≤–∫–∏ —É –∞–≤—Ç–æ—Ä–∞ –µ—Å—Ç—å —É–∂–µ 1,6. –û–Ω–∞ –Ω–µ –ø–æ–¥—Ö–æ–¥–∏—Ç –ø–æ–¥ —ç—Ç—É —Å—Ö–µ–º—É? |
|
| –ê–≤—Ç–æ—Ä: | serg_svd [ –ü–Ω –º–∞–π 05, 2014 23:58:25 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–í –æ–±—â–µ–º –ø–æ—Å–º–æ—Ç—Ä–µ–ª –Ω–µ–∫–æ—Ç–æ—Ä—ã–µ –æ—Ç–∑—ã–≤—ã –Ω–∞ —Ä—É—á–∫–∏ –¥–ª—è –∂–∞–ª –¢12 –∏ –∑–∞–∫–∞–∑–∞–ª —Å–µ–±–µ FX-9501. –ß—Ç–æ-—Ç–æ –±–æ–ª—å—à–µ –ø–æ–Ω—Ä–∞–≤–∏–ª–∞—Å—å. |
|
| –ê–≤—Ç–æ—Ä: | BV-Dial [ –í—Ç –º–∞–π 06, 2014 11:04:49 ] | ||
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º | ||
–ü–æ–ª—å–∑—É—é—Å—å —Ä—É—á–∫–∞–º–∏ –∏ FM-2028(—á–∞—Å—Ç–æ) –∏ FX-9501(–Ω–µ —á–∞—Å—Ç–æ).–ù–∞—Ä–µ–∫–∞–Ω–∏–π –æ–±–µ –Ω–µ –≤—ã–∑—ã–≤–∞—é—Ç –Ω–µ—Å–º–æ—Ç—Ä—è –Ω–∞ —Å—Ç–æ–∏–º–æ—Å—Ç—å 12—É–µ –∏ 11—É–µ. –•–æ—Ç—è –≤ —Å–µ—Ç–∏ –≤–∏–¥–µ–ª –ø–ª–æ—Ö–∏–µ –æ—Ç–∑—ã–≤—ã –Ω–∞ FM-2028.–ú–Ω–µ –Ω–∞–≤–µ—Ä–Ω–æ –ø–æ–≤–µ–∑–ª–æ. –ü—Ä–æ—à–∏–≤–∫–∞ 1.6 –ø–æ–ª–Ω–æ—Å—Ç—å –ø–æ–¥—Ö–æ–¥–∏—Ç, —Å–µ–π—á–∞—Å –µ–π –∏ –ø–æ–ª—å–∑—É—é—Å—å-–∫–æ—Å—è–∫–æ–≤ –Ω–µ –æ–±–Ω–∞—Ä—É–∂–µ–Ω–æ.–ü–∞—è–ª—å–Ω–æ–π —Å—Ç–∞–Ω—Ü–∏–µ–π –¥–æ–≤–æ–ª–µ–Ω –Ω–∞ 99%.
|
|||
| –ê–≤—Ç–æ—Ä: | serg_svd [ –í—Ç –º–∞–π 06, 2014 14:19:50 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
BV-Dial –ø–∏—Å–∞–ª(–∞): –ü–∞—è–ª—å–Ω–æ–π —Å—Ç–∞–Ω—Ü–∏–µ–π –¥–æ–≤–æ–ª–µ–Ω –Ω–∞ 99%. –ê —á—Ç–æ –≤—Ö–æ–¥–∏—Ç –≤ 1%? –ü–æ –ø–æ–≤–æ–¥—É —Ä—É—á–µ–∫, 2028 –±–æ–ª–µ–µ —É–¥–æ–±–Ω–∞ –¥–ª—è —á–∞—Å—Ç–æ–π —Å–º–µ–Ω—ã –∂–∞–ª. –ü—Ä–∏—á–µ–º –∏ –Ω–∞–∫–æ–Ω–µ—á–Ω–∏–∫ —É –∫–∞–∂–¥–æ–≥–æ –∂–∞–ª–∞ –¥–æ–ª–∂–µ–Ω –±—ã—Ç—å —Å–≤–æ–π. –ù–æ —è —á–∞—Å—Ç–æ –∂–∞–ª–∞ –º–µ–Ω—è—Ç—å –Ω–µ –ø–ª–∞–Ω–∏—Ä—É—é. –£ –º–µ–Ω—è –ø–æ–∫–∞ –∂–µ–ª–∞–Ω–∏–µ –æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –¥–∞–Ω–Ω—ã–π —Ç–∏–ø –∂–∞–ª, —Ç–∞–∫ –∫–∞–∫ –ª—é–∫–µ–µ–≤—Å–∫–∏–π –ø–∞—è–ª—å–Ω–∏–∫ –Ω–µ –≤—Å–µ–º –Ω—Ä–∞–≤–∏—Ç—Å—è. –ï—Å–ª–∏ –∑–∞—Ü–µ–ø–∏—Ç, —Ç–æ –ø–æ–¥—É–º–∞—é –æ –ø–æ–∫—É–ø–∫–µ 2028. –í –Ω–µ–º –º–µ–Ω—è —Å–º—É—â–∞–µ—Ç —Å–∞–º–∞ –∑–∞—â–µ–ª–∫–∞ –∫—Ä–µ–ø–ª–µ–Ω–∏—è —Ä—É—á–∫–∏ –∫ —Å–º–µ–Ω–Ω–æ–º—É –Ω–∞–∫–æ–Ω–µ—á–Ω–∏–∫—É. –í—ã–≥–ª—è–¥–∏—Ç –±–æ–ª—å–Ω–æ —Ö–∏–ª–æ. –•–æ—Ç—è —Å –¥—Ä—É–≥–æ–π —Å—Ç–æ—Ä–æ–Ω—ã —Ç–∞–º —Ç–æ —Ç–æ–ª—å–∫–æ –Ω–∞–≥—Ä—É–∑–∫–∞ –æ—Ç –ø—Ä–æ–≤–æ–¥–∞ –¥–∞ –∏ –≤—Å–µ. |
|
| –ê–≤—Ç–æ—Ä: | BV-Dial [ –í—Ç –º–∞–π 06, 2014 16:05:18 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–£ FX-9501 –∂–∞–ª–æ –º–µ–Ω—è–µ—Ç—Å—è –±—ã—Å—Ç—Ä–µ–µ.–ó–∞ –∑–∞—â–µ–ª–∫–∏ —É FM-2028–í –Ω–µ –±–æ–π—Ç–µ—Å—å - –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –∫—Ä–µ–ø–∫–∏–µ.–í 1% –≤—Ö–æ–¥–∏—Ç –Ω–µ–ª–∏–Ω–µ–π–Ω–æ—Å—Ç—å –Ω–∞ –∫—Ä–∞—è—Ö –¥–∏–∞–ø–∞–∑–æ–Ω–∞( –Ω–∞ 200 –≥—Ä–∞–¥—É—Å–∞—Ö –∑–∞–≤—ã—à–µ–Ω–∏–µ –Ω–∞ 10....15 –≥—Ä–∞–¥—É—Å–æ–≤ ,–Ω–∞ 380 –∑–∞–Ω–∏–∂–µ–Ω–∏–µ –Ω–∞ 10...15 –≥—Ä–∞–¥—É—Å–∞—Ö),–Ω–æ —ç—Ç–æ —É–∂–µ –º–æ–∏ –ø—Ä–∏–¥–∏—Ä–∫–∏ –≤—Å–µ —Ä–∞–≤–Ω–æ –ø–æ—á—Ç–∏ –≤—Å–µ–≥–¥–∞ –ø–∞—è—é –ø—Ä–∏ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä–∞—Ö 260....300 –≥—Ä–∞–¥—É—Å–∞—Ö. –ü–æ—Å–ª–µ Hakko-907(–æ—Ä–∏–≥–∏–Ω–∞–ª) –±—ã–ª –ø—Ä–∏—è—Ç–Ω–æ —É–¥–∏–≤–ª–µ–Ω.–ü–æ–ø—ã—Ç–∞—é—Å—å –≤ –±–ª–∏–∂–∞–π—à–µ–µ –≤—Ä–µ–º—è –≤–∏–¥–µ–æ –Ω–µ–±–æ–ª—å—à–æ–µ –∑–∞–ø–∏—Å–∞—Ç—å. |
|
| –ê–≤—Ç–æ—Ä: | serg_svd [ –í—Ç –º–∞–π 06, 2014 16:40:11 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
BV-Dial –ø–∏—Å–∞–ª(–∞): –£ FX-9501 –∂–∞–ª–æ –º–µ–Ω—è–µ—Ç—Å—è –±—ã—Å—Ç—Ä–µ–µ. –î–∞ –Ω–µ—Ç. –ë—ã—Å—Ç—Ä–µ–µ —É 2028. –Ø –º–æ–∂–µ—Ç –Ω–µ–ø—Ä–∞–≤–∏–ª—å–Ω–æ –¥–µ—Ç–∞–ª—å –Ω–∞–∑—ã–≤–∞—é, –Ω–æ —è –∏–º–µ–ª –≤ –≤–∏–¥—É –∂–µ–ª—Ç—ã–π –Ω–∞–∫–æ–Ω–µ—á–Ω–∏–∫ –∑–∞ –∫–æ—Ç–æ—Ä—ã–π –ø–∞—è–ª—å–Ω–∏–∫ –∏ –¥–µ—Ä–∂–∏—Ç—Å—è. –ü–æ –∑–∞–¥—É–º–∫–µ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç–µ–ª—è –æ–Ω –¥–æ–ª–∂–µ–Ω –±—ã—Ç—å –Ω–∞ –∫–∞–∂–¥–æ–º –∂–∞–ª–µ. –ò —Ç–æ–≥–¥–∞ –∏—Ö –º–æ–∂–Ω–æ —Å–º–µ–Ω—è—Ç—å –±—ã—Å—Ç—Ä–æ –Ω–µ –¥–æ–∂–∏–¥–∞—è—Å—å –æ—Å—Ç—ã–≤–∞–Ω–∏—è –∂–∞–ª–∞. –ü—Ä–∏—á–µ–º —ç—Ç–∏ —Ä—É—á–∫–∏ –µ—Å—Ç—å —Ä–∞–∑–Ω—ã—Ö —Ü–≤–µ—Ç–æ–≤ |
|
| –ê–≤—Ç–æ—Ä: | BV-Dial [ –í—Ç –º–∞–π 06, 2014 16:53:57 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–ü–æ –∑–∞–¥—É–º–∫–µ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç–µ–ª—è –¥–ª—è –∑–∞–º–µ–Ω—ã –∂–∞–ª–∞ —É FM-2028–í –Ω–∞–¥–æ –Ω–∞–∂–∞—Ç—å –Ω–∞ –∫–Ω–æ–ø–∫–∏-–∑–∞—â–µ–ª–∫–∏ - –∏ –∂–∞–ª–æ —Å –ø–æ–ª–æ–≤–∏–Ω–∫–æ–π –ø–∞—è–ª—å–Ω–∏–∫–∞ –≤—ã—Ö–æ–¥–∏—Ç –∏–∑ —Å–∏–Ω–µ–π —Ç—Ä—É–±–∫–∏.–ù–æ —Ç.–∫. —É –º–µ–Ω—è –Ω–µ –æ—Ä–∏–≥–∏–Ω–∞–ª –∏ –∫–Ω–æ–ø–∫–∏-–∑–∞—â–µ–ª–∫–∏ —Ä–∞–±–æ—Ç–∞—é—Ç –Ω–µ —Ç–∞–∫ –∫–∞–∫ –∑–∞–¥—É–º–∞–ª –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç–µ–ª—å –∂–∞–ª–æ –º–µ–Ω—è—é—Ç—Å—è —Ç—É–ø–æ –≤—ã—Ç–∞—Å–∫–∏–≤–∞–Ω–∏–µ–º –∏–∑ –∂–µ–ª—Ç–æ–π –ø–æ–ª–æ–≤–∏–Ω—ã –∫–∞–∫ –∏ —É FX-9501. |
|
| –ê–≤—Ç–æ—Ä: | 001 [ –í—Ç –º–∞–π 06, 2014 21:19:01 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–û—á–µ–Ω—å –∏–Ω—Ç–µ—Ä–µ—Å–Ω–∞—è —Ç–µ–º–∞! –î–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ –ª–∏ T12 —É–¥–æ–±–Ω–µ–µ 900–ú/T18 –Ω–∞ –ø—Ä–∞–∫—Ç–∏–∫–µ? –ï—Å–ª–∏ –¥–∞, —Ç–æ —Ö–æ—á–µ—Ç—Å—è –ø–æ–≤—Ç–æ—Ä–∏—Ç—å –í–∞—à—É –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏—é. –ù–æ –≤—Å—ë —É–ø–∏—Ä–∞–µ—Ç—Å—è –≤ –∂–∞–ª–æ‚Ķ –ü–æ–º–æ–≥–∏—Ç–µ —Ä–∞–∑–æ–±—Ä–∞—Ç—å—Å—è, –∏—â—É –µ–≥–æ –Ω–∞ taobao: –Ý—É—á–∫–∏, –∫–∞–∫ —è –ø–æ–Ω—è–ª, —Ç–∞–∫–∂–µ –ø–æ–¥–æ–π–¥—É—Ç –æ—Ç Hakko 942 (912)?  –ö—Å—Ç–∞—Ç–∏, —Å–∞–º–∏ –∫–∏—Ç–∞–π—Ü—ã –ø—Ä–µ–¥–ª–∞–≥–∞—é—Ç –∞–¥–∞–ø—Ç–∏—Ä–æ–≤–∞—Ç—å —Ä—É—á–∫—É –æ—Ç Hakko 936 (907), –Ω–æ –ø–æ–ª—É—á–∞–µ—Ç—Å—è "—É–¥–æ—á–∫–∞":   –∏ —Ü–µ–ª—å–Ω–æ–º–µ—Ç–∞–ª–ª–∏—á–µ—Å–∫–∏–π –≤–∞—Ä–∏–∞–Ω—Ç:  –ö–∞–∫–æ–π –≤—ã–±—Ä–∞—Ç—å? –ö—Å—Ç–∞—Ç–∏, –≤ –±–æ–ª—å—à–æ–º –∞—Å—Å–æ—Ä—Ç–∏–º–µ–Ω—Ç–µ –∞–Ω–∞–ª–æ–≥–æ–≤—ã–µ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã –¥–ª—è T12, —Ç–∏–ø–∞:   –û–Ω–æ —Ä–µ–∞–ª—å–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç? 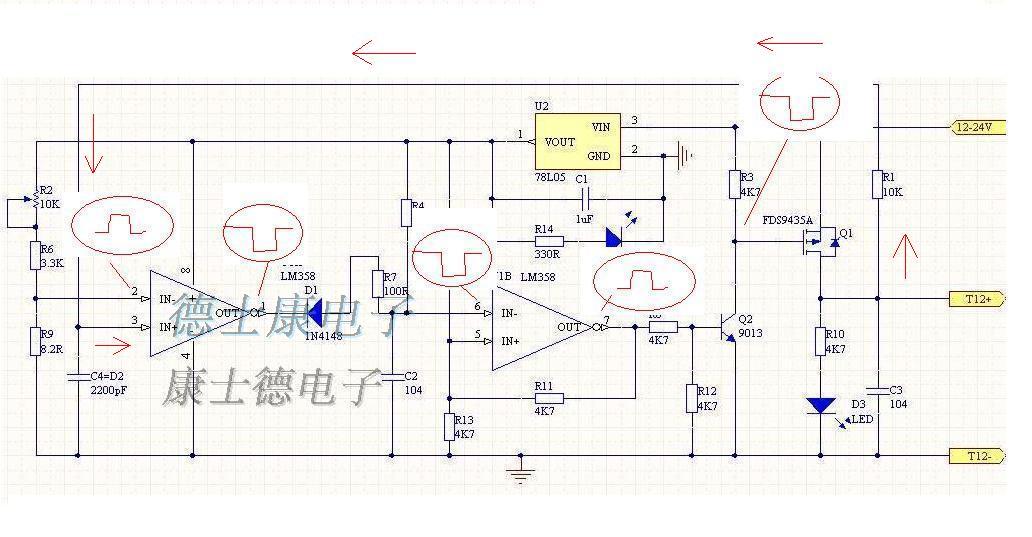 –ê –≤–æ—Ç —Ç–∞–∫–∏–µ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã —Å–æ –∑–≤—É–∫–æ–º (?):  –ò –≤–æ—Ç –µ—â—ë —á—Ç–æ-—Ç–æ —Å –æ—Ç–∫—Ä—ã—Ç—ã–º –∫–æ–¥–æ–º (—Å–∫–æ–ø–∏—Ä—É—é —Å—é–¥–∞) http://item.taobao.com/item.htm?spm=a1z ... 8575397573 –°–ø–æ–π–ª–µ—Ä–ö–æ–¥: ===== //---------- // Blinky.c //---------- // Copyright (C) 2010 Âæ∑£´Â∫∑ÁîµÂ≠ê Laboratories, Inc. // // AUTH: JS // DATE: 11 JUL 3 // // This program flashes the green LED on the C8051F31x target board about // five times a second using the interrupt handler for Timer2. // // Target: C8051F31x // // Tool chain: KEIL Eval 'c' //Ë∞ÉÂÖâOK; //ºÄÂÖ≥OK; //24c02ok; //---------- // Includes //---------- #include <c8051f310.h> // SFR declarations #include <INTRINS.H> #include <stdio.h> //---------- //---------- sfr16 ADC0 = 0xbd; // ADC0 data #define INT_DEC 256 // integrate and decimate ratio long result;//ADC //---------- // Global CONSTANTS //---------- #define SYSCLK 24500000 // System clock frequency #define SMB_FREQUENCY 50000 // Target SCL clock rate #define WRITE 0x00 // SMBus WRITE command #define READ 0x01 // SMBus READ command // Device addresses (7 bits, lsb is a don't care) #define EEPROM_ADDR 0xA0 // Device address for slave target // Note: This address is specified // in the Microchip 24LC02B // datasheet. // SMBus Buffer Size #define SMB_BUFF_SIZE 0x08 // Defines the maximum number of bytes // that can be sent or received in a // single transfer // Status vector - top 4 bits only #define SMB_MTSTA 0xE0 // (MT) start transmitted #define SMB_MTDB 0xC0 // (MT) data byte transmitted #define SMB_MRDB 0x80 // (MR) data byte received //---------- // Global VARIABLES //---------- unsigned char* pSMB_DATA_IN; // Global pointer for SMBus data // All receive data is written here unsigned char SMB_SINGLEBYTE_OUT; // Global holder for single byte writes unsigned char* pSMB_DATA_OUT; // Global pointer for SMBus data. // All transmit data is read from here unsigned char SMB_DATA_LEN; // Global holder for number of bytes // to send or receive in the current // SMBus transfer unsigned char WORD_ADDR; // Global holder for the EEPROM word // address that will be accessed in // the next transfer unsigned char TARGET; // Target SMBus slave address unsigned char temp_char; unsigned char retval; bit SMB_BUSY = 0; // Software flag to indicate when the // EEPROM_ByteRead() or // EEPROM_ByteWrite() // functions have claimed the SMBus bit SMB_RW; // Software flag to indicate the // direction of the current transfer bit SMB_SENDWORDADDR; // When set, this flag causes the ISR // to send the 8-bit <WORD_ADDR> // after sending the slave address bit SMB_RANDOMREAD; // When set, this flag causes the ISR // to send a START signal after // sending the word address bit SMB_ACKPOLL; // When set, this flag causes the ISR // to send a repeated START until the // slave has acknowledged its address // 16-bit SFR declarations sfr16 TMR2RL = 0xca; // Timer2 reload registers sfr16 TMR2 = 0xcc; // Timer2 counter registers sfr16 TMR3RL = 0x92; // Timer2 reload registers sfr16 TMR3 = 0x94; // Timer3 counter registers //---------- // 16-bit SFR Definitions for 'F30x //---------- int temp_int; int temp; unsigned char k; unsigned int m=200; unsigned int LD; unsigned char data1; unsigned int set_PCA=2;//PCA unsigned int Sign =0; //ÊÝáËÆ∞ unsigned int Sign_dispy =0; //ÊÝáËÆ∞ sbit LED = P3^3; // LED='1' means ON // P3.3 - LED sbit LED1 = P0^7; sbit key1 = P0^1;//(key_sw) sbit key2 = P0^2;//(key_up) sbit key3 = P0^3;//(key_down)2 sbit A3=P1^5; sbit A2=P1^7; sbit A1=P1^6; //sbit A1=P1^5; //sbit A2=P1^6; //sbit A3=P1^7; //---------- ///*0,1,2,3,4,5,6,7,8,9,*/ //unsigned char table1[]={0x50,0xDE,0x62,0x46,0xCC,0x45,0x41,0x5E,0x40,0x44,}; unsigned char table1[]={0xA0,0xBE,0xC2,0x8A,0x9C,0x89,0x81,0xBA,0x80,0x88,}; //---------- // Function PROTOTYPES //---------- void SYSCLK_Init (void); void PORT_Init (void); void Timer2_Init (int counts); void Timer2_ISR (void); void delay(int time); unsigned char key_in(void); void on_off (void); void pca_up(void); void display(unsigned char num); void delay1(unsigned int z); //---------- void SMBus_Init (void); void Timer1_Init (void); void Timer3_Init (void); void Port_Init (void); void SMBus_ISR (void); void Timer3_ISR (void); void EEPROM_ByteWrite(unsigned char addr, unsigned char dat); void EEPROM_WriteArray (unsigned char dest_addr, unsigned char *src_addr, unsigned char len); unsigned char EEPROM_ByteRead(unsigned char addr); void EEPROM_ReadArray (unsigned char *dest_addr, unsigned char src_addr, unsigned char len); //---------- // SYSCLK_Init //---------- // // This routine initializes the system clock to use the internal 24.5MHz / 8 // oscillator as its clock source. Also enables missing clock detector reset. // void SYSCLK_Init (void) { } //---------- // PORT_Init //---------- // // Configure the Crossbar and GPIO ports. // void PORT_Init (void) { // P3MDIN = 0xFD; //------- 24c02-->p1.2_p1.3 ------ //------- PCA-->p1.4 -ËæìÂá∫ ------ //P1MDOUT = 0xf0; // P0SKIP = 0xFF; // P1SKIP = 0xE3; // XBR0 = 0x04; // XBR1 = 0xc1; //---------- P3MDIN = 0xFD; P1MDOUT = 0xF0; P0SKIP = 0xFF; P1SKIP = 0x03; XBR0 = 0x04; XBR1 = 0xC1; } //---------- // ADC0ÈÖçÁΩÆÔºåT3ÂÆöÊó∂ÂêØÂä®ADC //---------- void ADC0_Init (void) { //---------- REF0CN = 0x0e; // ÂêØÁî®ÂÜÖÈÉ®Âü∫ÂáÜÊ∫ê //ÈÄâÊã©ÈááÊÝ∑ËæìÂÖ•Ê∫êGND‰Ωú‰∏∫Ë¥üËæìÂÖ•ADCÂ∑•‰ΩúÂú®ÂçïÁ´ØÊñπºè //ADC0CN = 0xC5; AMX0P = 0x11; AMX0N = 0x1F; ADC0CN = 0xC1; //ÊéßÂà∂Âô® 0 EIE1 |= 0x08; // ÂêØÁî® ADC ‰∏≠Êñ≠ } //---------- // ----Timer0_Init---- //---------- void Timer0_Init() { TMOD = 0x21; // Mode set -timer 0, -timer 1, = 100001 TH0=0xF0; /* ËÆ°Êï∞ÂàùÂĺÂÜôÂÖ•TH1 */ TL0=0x00; /* ÂÜôÂÖ•ËÆ°Êï∞ÂàùÂĺÂà∞TL1 */ ET0=1; /* ÂÆöÊó∂Âô®0‰∏≠Êñ≠ÂÖÅËÆ∏*/ TR0=1; //* ÂÆöÊó∂Âô®0ÂáܧáºÄÂßã *///Enable Timer 0 Interrupt. } //---------- // Timer2_Init //---------- // // Configure Timer2 to 16-bit auto-reload and generate an interrupt at // interval specified by <counts> using SYSCLK/48 as its time base. // void Timer2_Init (int counts) { TMR2CN = 0x00; // Stop Timer2; Clear TF2; // use SYSCLK/12 as timebase CKCON &= ~0x60; // Timer2 clocked based on T2XCLK; TMR2RL = -counts; // Init reload values TMR2 = 0xffff; // set to reload immediately ET2 = 1; // enable Timer2 interrupts TR2 = 1; // start Timer2 } // //---------- // //---------- void PCA_Init (void) { // PCA0CN = 0x40; // PCA0CNÔºöPCA ÊéßÂà∂ÂØÑÂ≠òÂô® ÂÖÅËÆ∏ PCAËÆ°Êï∞Âô®/ÂÆöÊó∂Âô®„ÄÇSFRÂú∞ÂùÄÔºö0xD8 // PCA0MD &= ~0x40; // PCA0MD = 0x01; // PCA0MDÔºöPCA ÊñπºèÂØÑÂ≠òÂô® ÂΩìCFÔºàPCA0CN.7ÔºâË¢´ÁΩƉΩçÊó∂ÔºåÂÖÅËÆ∏PCA ËÆ°Êï∞Âô®/ÂÆöÊó∂Âô®Ê∫¢Âá∫Áöщ∏≠Êñ≠ËØ∑ʱDŽÄÇ // PCA0CPM0 = 0x4b; // { PCA0CPMnÔºöPCA ÊçïÊçâ/ÊØîËæÉÂØÑÂ≠òÂô® } MATn=1,PWMn=1,ECCFn=1, PCA0CN = 0x40; PCA0CPM0 = 0xc2; PCA0CPL0 = 0x00; PCA0CPH0 = 0x00; PCA0CPL4 = 0x00; PCA0MD &= 0x40; PCA0MD = 0x01; } //---------- // //---------- void delay(int time) { int a=time; while(a!=0) { a--; } } //---------- // //---------- void delay1(unsigned int z) { unsigned x,y; for(x=z;x>0;x--) for(y=114;y>0;y--); } //z=1‰∏∫1ms,z=100‰∏∫100msÔºå //---------- // //---------- unsigned char key_in(void) { if(key1==0) //(key_sw) key1=P0^2; { key1=1; delay1(10); if(key1==0) { key1=1; delay1(10); while(key1==0); return(0x1);//ËøîÂõûÂ≠óÁ¨¶"1"Ë°®Á§∫ÊåâÈîÆSW1Êåâ‰∏ã } } //---------- if(key2==0) //(key_up)key2=P2^7; { key2=1; delay1(10); if(key2==0) { key2=1; delay1(10); while(key2==0); if(key3==1) { return(0x3);//ËøîÂõûÂ≠óÁ¨¶"2"Ë°®Á§∫ÊåâÈîÆSW1Êåâ‰∏ã } return(0x2);//ËøîÂõûÂ≠óÁ¨¶"2"Ë°®Á§∫ÊåâÈîÆSW1Êåâ‰∏ã } } return(0);//ËøîÂõû0,Ë°®Á§∫Ê≤°ÊúâÊåâÈîÆÊåâ‰∏ã } //---------- // //---------- void on_off (void) // { if(k==1) //(key_sw) key1=P0^2; { Sign = Sign+1; if (Sign==1)// if/ else ÈÄâÊã©ÁªìÊûÑ { LED = 0; } else if(Sign==2) { LED = 1; Sign= 0; } } } //---------- // //---------- void pca_up(void) { if(k==2) { Sign_dispy=500; {if (Sign==1)// if/ else ÈÄâÊã©ÁªìÊûÑ m=m-2; for(;m>400;m=400); //ÊòæÁ§∫ÂåπÈÖçÁöÑÈóÆÈ¢ò for(;m<200;m=200); //ÊòæÁ§∫ÂåπÈÖçÁöÑÈóÆÈ¢ò // Write the value 0xCC to location 0x38 in the EEPROM EEPROM_ByteWrite(0x27, m); } } } //---------- // //---------- void pca_down(void) { if(k==3) { Sign_dispy=500; {if (Sign==1)// if/ else ÈÄâÊã©ÁªìÊûÑ m=m+2; for(;m>400;m=400); //ÊòæÁ§∫ÂåπÈÖçÁöÑÈóÆÈ¢ò for(;m<200;m=200); //ÊòæÁ§∫ÂåπÈÖçÁöÑÈóÆÈ¢ò // Write the value 0xCC to location 0x38 in the EEPROM EEPROM_ByteWrite(0x27, m); } } } //---------- //---------- void display(unsigned int num) { unsigned int k,m,n,i; k=num/1000; m=(num%1000)/100; n=(num%100)/10; i=num%10; if (Sign==1)// on_display { P2=table1[m]; A1=1; delay1(3); A1=0; P2=0xff; P2= table1[n]; A2=1; delay1(3); A2=0; P2=0xff; P2=table1[i]; A3=1; delay1(3); A3=0; P2=0xff; } else if(Sign==2) // off_display { A1=0; A2=0; A3=0; } } //---------- //---------- void EEPROM_ByteWrite( unsigned char eaddr, unsigned char edat ) { while (SMB_BUSY); // Wait for SMBus to be free. SMB_BUSY = 1; // Claim SMBus (set to busy) // Set SMBus ISR parameters TARGET = EEPROM_ADDR; // Set target slave address SMB_RW = WRITE; // Mark next transfer as a write SMB_SENDWORDADDR = 1; // Send Word Address after Slave Address SMB_RANDOMREAD = 0; // Do not send a START signal after // the word address SMB_ACKPOLL = 1; // Enable Acknowledge Polling (The ISR // will automatically restart the // transfer if the slave does not // acknowledge its address. // Specify the Outgoing Data WORD_ADDR = eaddr; // Set the target address in the EEPROM's // internal memory space SMB_SINGLEBYTE_OUT = edat; // store dat (local variable) in a global // variable so the ISR can read it after // this function exits pSMB_DATA_OUT = &SMB_SINGLEBYTE_OUT; // The outgoing data pointer points to // the <dat> variable. SMB_DATA_LEN = 1; // Specify to ISR that the next transfer // will contain one data byte // Initiate SMBus Transfer STA = 1; } //---------- // EEPROM_WriteArray () //---------- // Writes <len> data bytes to the EEPROM slave specified by the <EEPROM_ADDR> // constant. // void EEPROM_WriteArray (unsigned char dest_addr, unsigned char* src_addr, unsigned char len) { unsigned char i; unsigned char* pData = (unsigned char*) src_addr; for( i = 0; i < len; i++ ){ EEPROM_ByteWrite(dest_addr++, *pData++); } } //---------- // EEPROM_ByteRead () //---------- // // This function returns a single byte from location <addr> in the EEPROM then // polls the <SMB_BUSY> flag until the read is complete. // unsigned char EEPROM_ByteRead( unsigned char daddr) { unsigned char retval; // Holds the return value while (SMB_BUSY); // Wait for SMBus to be free. SMB_BUSY = 1; // Claim SMBus (set to busy) // Set SMBus ISR parameters TARGET = EEPROM_ADDR; // Set target slave address SMB_RW = WRITE; // A random read starts as a write // then changes to a read after // the repeated start is sent. The // ISR handles this switchover if // the <SMB_RANDOMREAD> bit is set. SMB_SENDWORDADDR = 1; // Send Word Address after Slave Address SMB_RANDOMREAD = 1; // Send a START after the word address SMB_ACKPOLL = 1; // Enable Acknowledge Polling // Specify the Incoming Data WORD_ADDR = daddr; // Set the target address in the EEPROM's // internal memory space pSMB_DATA_IN = &retval; // The incoming data pointer points to // the <retval> variable. SMB_DATA_LEN = 1; // Specify to ISR that the next transfer // will contain one data byte // Initiate SMBus Transfer STA = 1; while(SMB_BUSY); // Wait until data is read return retval; } /////////////// //---------- // EEPROM_ReadArray () //---------- // Reads up to 256 data bytes from the EEPROM slave specified by the <EEPROM_ADDR> // constant. // void EEPROM_ReadArray (unsigned char* dest_addr, unsigned char src_addr, unsigned char len) { while (SMB_BUSY); // Wait for SMBus to be free. SMB_BUSY = 1; // Claim SMBus (set to busy) // Set SMBus ISR parameters TARGET = EEPROM_ADDR; // Set target slave address SMB_RW = WRITE; // A random read starts as a write // then changes to a read after // the repeated start is sent. The // ISR handles this switchover if // the <SMB_RANDOMREAD> bit is set. SMB_SENDWORDADDR = 1; // Send Word Address after Slave Address SMB_RANDOMREAD = 1; // Send a START after the word address SMB_ACKPOLL = 1; // Enable Acknowledge Polling // Specify the Incoming Data WORD_ADDR = src_addr; // Set the target address in the EEPROM's // internal memory space pSMB_DATA_IN = (unsigned char*) dest_addr;// Set the the incoming data pointer SMB_DATA_LEN = len; // Specify to ISR that the next transfer // will contain <len> data bytes // Initiate SMBus Transfer STA = 1; while(SMB_BUSY); // Wait until data is read } //---------- // Initialization Routines //---------- //---------- // SMBus_Init() //---------- // // SMBus configured as follows: // - SMBus enabled // - Slave mode disabled // - Timer1 used as clock source. The resulting SCL frequency will be approximately // 1/3 the Timer1 overflow rate // - Setup and hold time extensions enabled // - Free and SCL low timeout detection enabled // void SMBus_Init (void) { SMB0CF = 0x5D; // Use Timer1 overflows as SMBus clock // source; // Disable slave mode; // Enable setup & hold time extensions; // Enable SMBus Free timeout detect; // Enable SCL low timeout detect; SMB0CF |= 0x80; // Enable SMBus; } //---------- // Timer3_Init() //---------- // // Timer3 configured for use by the SMBus low timeout detect feature as follows: // - Timer3 in 16-bit auto-reload mode // - SYSCLK/12 as Timer3 clock source // - Timer3 reload registers loaded for a 25ms overflow period // - Timer3 pre-loaded to overflow after 25ms // - Timer3 enabled // void Timer3_Init (void) { TMR3CN = 0x00; // Timer3 configured for 16-bit // auto-reload, // low-byte interrupt disabled TMR3 = -(SYSCLK/12/40); // Timer3 configured to overflow after TMR3RL = -(SYSCLK/12/40); // ~25ms (for SMBus low timeout detect) CKCON &= ~0x40; // Timer3 uses SYSCLK/12 TMR3 |= 0x04; // Start Timer3 } //---------- // Timer1_Init() //---------- // // Timer1 configured as the SMBus clock source as follows: // - Timer1 in 8-bit auto-reload mode // - SYSCLK / 12 as Timer1 clock source // - Timer1 overflow rate => 3 * SMB_FREQUENCY // - The maximum SCL clock rate will be ~1/3 the Timer1 overflow rate // - Timer1 enabled // void Timer1_Init (void) { CKCON &= ~0x0B; // Timer1 clock source = SYSCLK / 12 TMOD = 0x20; // Timer1 in 8-bit auto-reload mode TH1 = -(SYSCLK/SMB_FREQUENCY/12/3); // Timer1 configured to overflow at 1/3 // the rate defined by SMB_FREQUENCY TL1 = -(SYSCLK/SMB_FREQUENCY/12/3); // Timer1 preloaded to overflow at 1/3 // the rate defined by SMB_FREQUENCY TR1 = 1; // Timer1 enabled } //---------- // SMBus Interrupt Service Routine (ISR) //---------- // // SMBus ISR state machine // - Master only implementation - no slave or arbitration states defined // - All incoming data is written starting at the global pointer <pSMB_DATA_IN> // - All outgoing data is read from the global pointer <pSMB_DATA_OUT> // void SMBus_ISR (void) interrupt 7 { bit FAIL = 0; // Used by the ISR to flag failed // transfers static char i=0; // Used by the ISR to count the // number of data bytes sent or // received static bit SEND_START = 0; // Send a start switch (SMB0CN & 0xF0) // Status vector { // Master Transmitter/Receiver: START condition transmitted. case SMB_MTSTA: SMB0DAT = TARGET; // Load address of the target slave SMB0DAT |= SMB_RW; // Load R/W bit STA = 0; // Manually clear START bit i = 0; _nop_(); // reset data byte counter break; // Master Transmitter: Data byte (or Slave Address) transmitted case SMB_MTDB: if (ACK) // Slave Address or Data Byte { // Acknowledged? if (SEND_START) { STA = 1; SEND_START = 0; break; } if(SMB_SENDWORDADDR) // Are we sending the word address? { SMB_SENDWORDADDR = 0; // Clear flag SMB0DAT = WORD_ADDR; // send word address if (SMB_RANDOMREAD) { SEND_START = 1; // send a START after the next ACK cycle SMB_RW = READ; } break; } if (SMB_RW==WRITE) // Is this transfer a WRITE? { if (i < SMB_DATA_LEN) // Is there data to send? { SMB0DAT = *pSMB_DATA_OUT; // send data byte pSMB_DATA_OUT++; // increment data out pointer i++; // increment number of bytes sent } else { STO = 1; // set STO to terminte transfer SMB_BUSY = 0; // clear software busy flag } } else {} // If this transfer is a READ, // then take no action. Slave // address was transmitted. A // separate 'case' is defined // for data byte recieved. } else // If slave NACK, { if(SMB_ACKPOLL) { STA = 1; // Restart transfer } else { FAIL = 1; // Indicate failed transfer } // and handle at end of ISR } break; // Master Receiver: byte received case SMB_MRDB: if ( i < SMB_DATA_LEN ) // Is there any data remaining? { *pSMB_DATA_IN = SMB0DAT; // Store received byte pSMB_DATA_IN++; // Increment data in pointer i++; // Increment number of bytes received ACK = 1; // Set ACK bit (may be cleared later // in the code) } if (i == SMB_DATA_LEN) // This is the last byte { SMB_BUSY = 0; // Free SMBus interface ACK = 0; // Send NACK to indicate last byte // of this transfer STO = 1; // Send STOP to terminate transfer } break; default: FAIL = 1; // Indicate failed transfer // and handle at end of ISR break; } if (FAIL) // If the transfer failed, { SMB0CN &= ~0x40; // Reset communication SMB0CN |= 0x40; SMB_BUSY = 0; // Free SMBus } SI=0; // clear interrupt flag } //---------- // Timer3 Interrupt Service Routine (ISR) //---------- // // A Timer3 interrupt indicates an SMBus SCL low timeout. // The SMBus is disabled and re-enabled here // void Timer3_ISR (void) interrupt 14 { SMB0CN &= ~0x40; // Disable SMBus SMB0CN |= 0x40; // Re-enable SMBus TMR3CN &= ~0x80; // Clear Timer3 interrupt-pending flag } //===pca - adc====== unsigned int consequence( int temp,unsigned int m) { int tempera; unsigned int setting_pca; unsigned int consequence; tempera=temp; setting_pca=m; if( tempera > setting_pca){consequence=255;} //ÂÖ≥ else { consequence=8; } //开 if( tempera> 380){consequence=255;} //ÂÖ≥ if( Sign==0){consequence=255;} //ÂÖ≥ return consequence; } ///---------- //---------- /* int pid ( ) { //--------- //ÂÆö‰πâÂèòÈáè float Kp; //PIË∞ÉËäÇÁöÑÊØî‰æãÂ∏∏Êï∞ float Ti; //PIË∞ÉËäÇÁöÑÁßØÂàÜÂ∏∏Êï∞ float T; //ÈááÊÝ∑Âë®Êúü float Ki; float Kd; float ek; //ÂÅèÂ∑Æe[k] float ek1; //ÂÅèÂ∑Æe[k-1] float ek2; //ÂÅèÂ∑Æe[k-2] float uk; //u[k] signed int uk1; //ÂØπu[k]ÂõõËàç‰∫îÂÖ•ÂèñÊï¥ Kp=200; Ki=3/2; ek=temp_int ; ek1=200; ek2=ek-ek1; //Ti= (Ki*ek2)+( Kp*ek); Ti= (Ki*ek2)+( Kp); } */ //====== // //---------- // MAIN Routine //---------- void main (void) { // -----ÂàùÂßãÂåñ----- int iNum = 0; int temperature; char in_buff[8] = {0}; // incoming data buffer char out_buff[8] = "ABCDEFG"; // outgoing data buffer PCA0MD &= ~0x40; // WDTE = 0 (clear watchdog timer // enable) SYSCLK_Init (); // Initialize system clock to // 24.5MHz OSCICN |= 0x03; // Set internal oscillator to highest // setting (24500000) RSTSRC = 0x04; // enable missing clock detector PORT_Init (); // initialize crossbar and GPIO //-------ADC---------------- Timer0_Init(); ADC0_Init (); // init ADC AD0TM=0; //------PCA------- Timer2_Init (6000); //5000-50000 //Init Timer2 to generate // interrupts at a 10Hz rate. PCA_Init (); /*PCAÂàùÂßãÂåñÊàê8‰ΩçËÑâÂÆΩË∞ÉÁΩÆÊñπºè*/ //--------24co2-------------- Timer1_Init (); // Configure Timer1 for use as SMBus // clock source Timer3_Init (); // Configure Timer2 for use with SMBus // low timeout detect SMBus_Init (); // Configure and enable SMBus //---------- EIE1 = 0x99; EIP1 = 0x01; //ÔºàPCA0Ôºâ‰∏≠Êñ≠ÂÖÅËÆ∏ //---------- EA = 1; // enable global interrupts Sign =1; // Write the value 0xAA to location 0x25 in the EEPROM EEPROM_ByteWrite(0x26, 0x1); // Read the value at location 0x25 in the EEPROM temp_char = EEPROM_ByteRead(0x26); // Store the outgoing data buffer at EEPROM address 0x50 EEPROM_WriteArray(0x50, out_buff, sizeof(out_buff)); // Fill the incoming data buffer with data starting at EEPROM address 0x50 EEPROM_ReadArray(in_buff, 0x50, sizeof(in_buff)); //---------- // Read the value at location 0x25 in the EEPROM temp_char = EEPROM_ByteRead(0x27); m=temp_char; //---------- temp_char = EEPROM_ByteRead(0x27); m=350; //---------- while(result==0); //Á≠â‰∫é0,‰æßÁ≠âÂæÖ while (1) { EA =0; // ÂÖ≥‰∏≠Êñ≠ temperature = result; temperature &=0x000fff; delay1(10); EA = 1; temperature = temperature*100L*3/512; temp_int = temperature; //adc temp_int temp =temp_int; //temp =((temp_int-200)*200/100)+200; set_PCA=consequence(temp, m); //---------- data1=key_in(); k=data1; on_off() ; //ºÄÂÖ≥ pca_up(); //PCAÂäÝ pca_down(); //PCAÂáè //---------- } } ////////////////////////////////////////////////////////////////// // //---------- // ---interrupt---- //---------Timer0_Overflow()---------- void Timer0_Overflow() interrupt 1 using 0 { TH0=0x80; TL0=0x00;//ËÆ°Êï∞ÂàùÂĺÂà∞TL0 */ } //---------- // Timer2_ISR //---------- // // This routine changes the state of the LED whenever Timer2 overflows. // void Timer2_ISR (void) interrupt 5 { if (Sign_dispy >= 1) { display(m); Sign_dispy--; } if (Sign_dispy<=1) { display( temp ); } //ÊòæÁ§∫ TF2H = 0; // clear Timer2 interrupt flag } //---------- // ADC0ÈááÊÝ∑‰∏≠Êñ≠ //---------- void ADC0_ISR (void) interrupt 10 { static unsigned int_dec=INT_DEC; static long accumulator=0L; ADC0CN &= ~0x20; // Ê∏Ö ADC ‰∏≠Êñ≠ÊÝáÂøó‰Ωç accumulator += ADC0; // Á¥ØÂäÝADCÈááÊÝ∑Êï∞ÊçÆ int_dec--; // ÊåáÈíàÂáè1 if (int_dec == 0) { // Á¥ØÂäÝÂÆå‰∫ÜÂêóÔºü int_dec = INT_DEC; // ÊåáÈíà§ç‰Ωç result = accumulator>>8; accumulator = 0L; // Á¥ØÂäÝÂíåÂèòÈáèÊ∏Ö0 } } //---------- // Interrupt Service Routines //---------- // void PCA_ISR (void) interrupt 11//PCA { unsigned char a ; bit PWM_PAC; CF = 0; PCA0CPH0=set_PCA; } //================PCA========== –ï—â—ë —è —Å–º–æ—Ç—Ä—é, –±–æ–ª—å—à–∏–Ω—Å—Ç–≤–æ –æ—Ç—Ç—É–¥–∞ –ø–∏—Ç–∞–µ—Ç—Å—è –æ—Ç –Ω–æ—É—Ç–±—É—á–Ω–æ–π –∑–∞—Ä—è–¥–∫–∏ 19–í‚Ķ |
|
| –ê–≤—Ç–æ—Ä: | serg_svd [ –í—Ç –º–∞–π 06, 2014 22:29:05 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–ö–∏—Ç–∞–π—Ü—ã –∏–∑–≤–µ—Å—Ç–Ω—ã–µ –ø—Ä–æ–π–¥–æ—Ö–∏. –û–Ω–∏ —Å–∞–º–∏ –∂–µ 2028 —Å–∫–æ–ø–∏—Ä–æ–≤–∞–ª–∏ –∏ –ª—è–ø–æ–≤ –ø–æ–Ω–∞–¥–µ–ª–∞–ª–∏ —Å –Ω–æ—Ä–º–∞–ª—å–Ω–æ –Ω–µ –Ω–∞–∂–∏–º–∞—é—â–∏–º–∏—Å—è —Ñ–∏–∫—Å–∞—Ç–æ—Ä–∞–º–∏ –∏ –Ω–µ –≤–ª–µ–∑–∞—é—â–∏–º –∂–∞–ª–æ–º. –Ø –æ—Ç—á–∞—Å—Ç–∏ –ø–æ—ç—Ç–æ–º—É —Ç–æ–∂–µ –≤–∑—è–ª 9051, –∞ –Ω–µ 2028 —Ä—É—á–∫—É. –ê –ø–æ –ø–æ–≤–æ–¥—É –ø–∏—Ç–∞–Ω–∏—è –æ—Ç 19–í - –ø–æ—á–µ–º—É –±—ã –∏ –Ω–µ—Ç. –ú–æ–∂–Ω–æ —Ö–æ—Ç—å –æ—Ç 12–≤. –¢–æ–ª—å–∫–æ –≥—Ä–µ—Ç—å—Å—è –¥–æ–ª—å—à–µ –±—É–¥–µ—Ç –∏ –Ω–µ –±—É–¥–µ—Ç –æ—Ç–¥–∞–≤–∞—Ç—å –∑–∞—è–≤–ª–µ–Ω–Ω—É—é –º–æ—â–Ω–æ—Å—Ç—å. |
|
| –ê–≤—Ç–æ—Ä: | serg_svd [ –í—Ç –º–∞–π 06, 2014 22:33:59 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
001 –ø–∏—Å–∞–ª(–∞): –Ý—É—á–∫–∏, –∫–∞–∫ —è –ø–æ–Ω—è–ª, —Ç–∞–∫–∂–µ –ø–æ–¥–æ–π–¥—É—Ç –æ—Ç Hakko 942 (912)? –æ –∫–∞–∫! –∞ —è –∏—Å–∫–∞–ª –Ω–∞ –æ—Ñ–∏—Ü–∏–∞–ª—å–Ω–æ–º —Å–∞–π—Ç–µ —Ä—É—á–∫—É 9051 –∏ –Ω–µ –Ω–∞—Ö–æ–¥–∏–ª, –∞ –æ–Ω–∞ –æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è –≤–æ–Ω –∫–∞–∫ –æ–±–∑—ã–≤–∞–µ—Ç—Å—è |
|
| –ê–≤—Ç–æ—Ä: | Nimnul [ –í—Ç –º–∞–π 06, 2014 23:44:14 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–Ý–µ–±—è—Ç, —Ç–æ–∂–µ –∏–Ω—Ç–µ—Ä–µ—Å—É–µ—Ç —ç—Ç–æ—Ç –ø–∞—è–ª—å–Ω–∏–∫, –Ω–æ –Ω–µ –Ω—Ä–∞–≤–∏—Ç—Å—è —Ç–æ —á—Ç–æ —É –∫–∏—Ç–∞–π—Ü–µ–≤ –Ω–∞ –∫–∞—Ä—Ç—Ä–∏–¥–∂–∞—Ö –ø–ª–∞–≤–∞—é—Ç –ø–∞—Ä–∞–º–µ—Ç—Ä—ã, –≤–æ—Ç –∏–∑-–∑–∞ —ç—Ç–æ–≥–æ –ø–ª—ã–≤–µ—Ç –∫–∞–ª–∏–±—Ä–æ–≤–∫–∞: BV-Dial –ø–∏—Å–∞–ª(–∞): –í 1% –≤—Ö–æ–¥–∏—Ç –Ω–µ–ª–∏–Ω–µ–π–Ω–æ—Å—Ç—å –Ω–∞ –∫—Ä–∞—è—Ö –¥–∏–∞–ø–∞–∑–æ–Ω–∞( –Ω–∞ 200 –≥—Ä–∞–¥—É—Å–∞—Ö –∑–∞–≤—ã—à–µ–Ω–∏–µ –Ω–∞ 10....15 –≥—Ä–∞–¥—É—Å–æ–≤ ,–Ω–∞ 380 –∑–∞–Ω–∏–∂–µ–Ω–∏–µ –Ω–∞ 10...15 –≥—Ä–∞–¥—É—Å–∞—Ö),–Ω–æ —ç—Ç–æ —É–∂–µ –º–æ–∏ –ø—Ä–∏–¥–∏—Ä–∫–∏ –≤—Å–µ —Ä–∞–≤–Ω–æ –ø–æ—á—Ç–∏ –≤—Å–µ–≥–¥–∞ –ø–∞—è—é –ø—Ä–∏ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä–∞—Ö 260....300 –≥—Ä–∞–¥—É—Å–∞—Ö. –£ Goot RX802AS –∫–∞—Ä—Ç—Ä–∏–¥–∂—ã —Ä–∞–∑–Ω–µ—Å–µ–Ω—ã –ø–æ –≥—Ä—É–ø–ø–∞–º, —Ç.–µ –Ω–∞ –∫–∞—Ä—Ç—Ä–∏–¥–∂–µ –Ω–∞–Ω–µ—Å–µ–Ω–∞ –∫–∞–ª–∏–±—Ä–æ–≤–æ—á–Ω–∞—è –∫–æ–Ω—Å—Ç–∞–Ω—Ç–∞, –∫–æ—Ç–æ—Ä—É—é –Ω—É–∂–Ω–æ –≤–≤–æ–¥–∏—Ç—å –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –ø—Ä–∏ —Å–º–µ–Ω–µ –∂–∞–ª–∞, –ø–æ–¥ –≥—Ä—É–ø–ø–∞–º–∏ –ø–æ–Ω–∏–º–∞–µ—Ç—Å—è –≤–æ—Ç —á—Ç–æ:  –í–æ—Ç —ç—Ç–æ –±—É–¥–µ—Ç –ø—Ä–∞–≤–∏–ª—å–Ω–æ –∏ —Ç–æ—á–Ω–æ...–ø—Ä–æ–≤–µ—Ä–µ–Ω–æ –ª–∏—á–Ω–æ –Ω–∞ —Å–≤–æ–µ–º Goot |
|
| –ê–≤—Ç–æ—Ä: | 001 [ –í—Ç –º–∞–π 06, 2014 23:49:12 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–¢.–µ. –Ω–µ –≤—Ä–µ–º—è –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç—å —Å –∫–∏—Ç–∞–π—Å–∫–∏—Ö –•–∞–∫–∫–∞ 900 (–æ–Ω–∏ –≤—Ä–æ–¥–µ —Å–æ –≤—Å–µ—Ö —Å—Ç–æ—Ä–æ–Ω –∑–Ω–∞–∫–æ–º—ã —É–∂–µ) –Ω–∞ T12? serg_svd –ø–∏—Å–∞–ª(–∞): 001 –ø–∏—Å–∞–ª(–∞): –Ý—É—á–∫–∏, –∫–∞–∫ —è –ø–æ–Ω—è–ª, —Ç–∞–∫–∂–µ –ø–æ–¥–æ–π–¥—É—Ç –æ—Ç Hakko 942 (912)? –æ –∫–∞–∫! –∞ —è –∏—Å–∫–∞–ª –Ω–∞ –æ—Ñ–∏—Ü–∏–∞–ª—å–Ω–æ–º —Å–∞–π—Ç–µ —Ä—É—á–∫—É 9051 –∏ –Ω–µ –Ω–∞—Ö–æ–¥–∏–ª, –∞ –æ–Ω–∞ –æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è –≤–æ–Ω –∫–∞–∫ –æ–±–∑—ã–≤–∞–µ—Ç—Å—è –ù—É —Ç–∞–∫ –∫–∞–∫—É—é –∏–∑ –Ω–∏—Ö –±—Ä–∞—Ç—å? |
|
| –ê–≤—Ç–æ—Ä: | BV-Dial [ –°—Ä –º–∞–π 07, 2014 08:46:25 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
–î–ª—è –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko 912 –ø—Ä–∏–º–µ–Ω—è—é—Ç—Å—è –∂–∞–ª–∞ —Å–µ—Ä–∏–∏ –¢2 –æ–Ω–∏ –Ω–∞ 25–º–º –∫–æ—Ä–æ—á–µ –∂–∞–ª –¢12. |
|
| –ê–≤—Ç–æ—Ä: | serg_svd [ –°—Ä –º–∞–π 07, 2014 08:56:20 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –ö–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø–∞—è–ª—å–Ω–∏–∫–∞ Hakko FM-2028 —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º |
001 –ø–∏—Å–∞–ª(–∞): –¢.–µ. –Ω–µ –≤—Ä–µ–º—è –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç—å —Å –∫–∏—Ç–∞–π—Å–∫–∏—Ö –•–∞–∫–∫–∞ 900 (–æ–Ω–∏ –≤—Ä–æ–¥–µ —Å–æ –≤—Å–µ—Ö —Å—Ç–æ—Ä–æ–Ω –∑–Ω–∞–∫–æ–º—ã —É–∂–µ) –Ω–∞ T12? –ù—É —Ç–∞–∫ –∫–∞–∫—É—é –∏–∑ –Ω–∏—Ö –±—Ä–∞—Ç—å? –Ø –¥—É–º–∞—é –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç—å –Ω–∞–¥–æ. –í–æ –≤—Å—è–∫–æ–º —Å–ª—É—á–∞–µ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å —Å–∞–º–æ–º—É –∏ —Ä–µ—à–∏—Ç—å. –ù–æ –º–Ω–µ –∫–∞–∂–µ—Ç—Å—è –¢12 –±—É–¥–µ—Ç –ª—É—á—à–µ 900 —Å–µ—Ä–∏–∏. –í –ø–æ—Å–ª–µ–¥–Ω–µ–π –µ—Å—Ç—å —Å—É—â–µ—Å—Ç–≤–µ–Ω–Ω—ã–π –Ω–µ–¥–æ—Å—Ç–∞—Ç–æ–∫ - –≤–æ–∑–¥—É—à–Ω—ã–π –∑–∞–∑–æ—Ä –º–µ–∂–¥—É –∂–∞–ª–æ–º –∏ –Ω–∞–≥—Ä–µ–≤–∞—Ç–µ–ª–µ–º –∏ –∏–∑-–∑–∞ —ç—Ç–æ–≥–æ –±–æ–ª—å—à–∞—è —Ç–µ–ø–ª–æ–≤–∞—è –∏–Ω–µ—Ä—Ü–∏—è. –ü—Ä–∏ –ø–∞–π–∫–µ –º–µ–ª–∫–∏—Ö –¥–µ—Ç–∞–ª–µ–π –≤–ø—Ä–æ—á–µ–º –Ω–µ–∑–∞–º–µ—Ç–Ω–æ. –ù–∞ —ç—Ç–æ –≤–∏–¥–∏–º–æ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç–µ–ª—å –∏ —Ä–∞—Å—Å—á–∏—Ç—ã–≤–∞–ª. –ù–æ –≤–æ—Ç –Ω–∞ –º–∞—Å—Å–∏–≤–Ω—ã—Ö –¥–µ—Ç–∞–ª—è—Ö —ç—Ç–æ—Ç –º–∏–Ω—É—Å —á—É–≤—Å—Ç–≤—É–µ—Ç—Å—è —Ä–µ–∞–ª—å–Ω–æ. –Ø –Ω–µ–¥–∞–≤–Ω–æ –æ—Ç–ø–∞–∏–≤–∞–ª —Ä–∞–∑—ä–µ–º —Å LiPO –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–∞ —Å –ø—Ä–æ–≤–æ–¥–æ–º AWG10. –ü–∞—è–ª—å–Ω–∏–∫ 900 —Å–µ—Ä–∏–∏ –Ω–∏–∫–∞–∫ –Ω–µ –º–æ–≥ —Ä–∞–∑–æ–≥—Ä–µ—Ç—å –ø—Ä–∏–ø–æ–π, —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—É —è –∑–∞–¥—Ä–∞–ª, –∂–∞–ª–æ –æ–±–≥–æ—Ä–∞—Ç—å –Ω–∞—á–∞–ª–æ –¥–∞–∂–µ. –û—Ç–ø–∞—è–ª –∫–∞–∫ —Ç–æ–ª—å–∫–æ –ø–æ–¥–¥—É–ª —Ñ–µ–Ω–æ–º 230 –≥—Ä–∞–¥—É—Å–æ–≤ –Ω–∞ –º–µ—Å—Ç–æ –ø–∞–π–∫–∏. –í—Ç–æ—Ä–æ–π —Ä–∞–∑—ä–µ–º –æ—Ç–ø–∞—è–ª –±–µ–∑ –ø—Ä–æ–±–ª–µ–º –≠–ü–°–ù40 —Å –º–µ–¥–Ω—ã–º –∂–∞–ª–æ–º. –ü–æ—ç—Ç–æ–º—É –ª–∏—á–Ω–æ —è –∏ —Ö–æ—á—É –ø—Ä–æ–≤–µ—Ä–∏—Ç—å –¢12. |
|
| –°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 125 | –ß–∞—Å–æ–≤–æ–π –ø–æ—è—Å: UTC + 3 —á–∞—Å–∞ |
| Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group http://www.phpbb.com/ |
|