–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 78 –∏–∑ 182
[ –°–æ–æ–±—â–µ–Ω–∏–π: 3623 ]
... , , , , , , ...
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
–ö–Ý–ê–ú
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Å–µ–Ω 10, 2017 14:08:26
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 139
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2918
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —è–Ω–≤ 10, 2008 22:01:02–°–æ–æ–±—â–µ–Ω–∏–π: 23868–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–æ–≤—Å–∫–∞—è –æ–±–ª–∞—Å—Ç—å, –§—Ä—è–∑–∏–Ω–æ
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ó–∞–º–µ—á–∞—Ç–µ–ª—å–Ω–æ, –≤ –∫–∞–∫–æ–º-—Ç–æ —Å–≤–æ–µ–º —É—Å—Ç—Ä–æ–π—Å—Ç–≤–µ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –±–æ–ª–µ–µ –ø—Ä–æ–¥–≤–∏–Ω—É—Ç—ã–µ –º–µ—Ç–æ–¥—ã –∫–æ–≥–¥–∞ –Ω—É–∂–Ω–æ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å –∏–∑–º–µ—Ä–µ–Ω–∏—è –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –±—ã—Å—Ç—Ä–æ, –Ω–æ —Ç–æ—á–Ω–æ—Å—Ç—å —Ç–æ —É–ø–∞–¥–µ—Ç –≤—Å–µ —Ä–∞–≤–Ω–æ, –ø–æ—Ç–æ–º—É –≤ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–µ, –∫–∞–∫ –ø—Ä–∏–±–æ—Ä–µ, –Ω–∏–∫—Ç–æ —Ç–∞–∫ –∏–∑–º–µ—Ä—è—Ç—å —á–∞—Å—Ç–æ—Ç—ã –Ω–µ –±—É–¥–µ—Ç.
–° –∫–∞–∫–æ–≥–æ –ø–µ—Ä–µ–ø—É–≥–∞ –¥–æ–ª–∂–Ω–∞ —É–ø–∞—Å—Ç—å —Ç–æ—á–Ω–æ—Å—Ç—å? –ò —Å –∫–∞–∫–æ–≥–æ –ø–µ—Ä–µ–ø—É–≥–∞ –º–µ—Ç–æ–¥—ã –∏–∑–º–µ—Ä–µ–Ω–∏—è –≤ –ø—Ä–∏–±–æ—Ä–∞—Ö –∏ –≤ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏–∏ –¥–æ–ª–∂–Ω—ã –æ—Ç–ª–∏—á–∞—Ç—å—Å—è? –û—Ç–∫—É–¥–∞ –í—ã –≤—Å–µ —ç—Ç–æ –≤–∑—è–ª–∏?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Å–µ–Ω 10, 2017 15:42:20
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–° –∫–∞–∫–æ–≥–æ –ø–µ—Ä–µ–ø—É–≥–∞ –¥–æ–ª–∂–Ω–∞ —É–ø–∞—Å—Ç—å —Ç–æ—á–Ω–æ—Å—Ç—å? –ò —Å –∫–∞–∫–æ–≥–æ –ø–µ—Ä–µ–ø—É–≥–∞ –º–µ—Ç–æ–¥—ã –∏–∑–º–µ—Ä–µ–Ω–∏—è –≤ –ø—Ä–∏–±–æ—Ä–∞—Ö –∏ –≤ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏–∏ –¥–æ–ª–∂–Ω—ã –æ—Ç–ª–∏—á–∞—Ç—å—Å—è? –û—Ç–∫—É–¥–∞ –í—ã –≤—Å–µ —ç—Ç–æ –≤–∑—è–ª–∏?
–°–º–æ—Ç—Ä–∏–º –Ω–∞ –≥—Ä–∞—Ñ–∏–∫
–ü—Ä–∏ –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –∏–∑–º–µ—Ä–µ–Ω–∏—è 1 —Å–µ–∫ –∏ –æ–ø–æ—Ä–Ω–æ–π —á–∞—Å—Ç–æ—Ç–µ 10MHz –ø–æ–ª—É—á–∏–º 7 –∑–Ω–∞—á–∞—â–∏—Ö —Ü–∏—Ñ—Ä, –∞ –µ—Å–ª–∏, –∫–∞–∫ —Ç—ã –ø—Ä–µ–¥–ª–∞–≥–∞–µ—à—å, –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å –∏–∑–º–µ—Ä–µ–Ω–∏—è –∑–∞ –æ—á–µ–Ω—å –º–∞–ª—ã–π –∏–∑–º–µ—Ä–∏—Ç–µ–ª—å–Ω—ã–π –∏–Ω—Ç–µ—Ä–≤–∞–ª, –Ω–∞–ø—Ä–∏–º–µ—Ä, –∑–∞ 1ms, —Ç–æ –∏—Ö –±—É–¥–µ—Ç –≤—Å–µ–≥–æ 4, –∞ —á–∞—Å—Ç–æ—Ç—ã –º–µ–Ω—å—à–µ 1KHz –º—ã —Ç–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º –Ω–æ—Ä–º–∞–ª—å–Ω–æ –∏ –Ω–µ –∏–∑–º–µ—Ä–∏–º, —Ç.–∫. –Ω–µ –±—É–¥–µ—Ç —Ö–æ—Ç—è –±—ã –æ–¥–Ω–æ–≥–æ —Ü–µ–ª–æ–≥–æ –ø–µ—Ä–∏–æ–¥–∞. –¢–∞–∫–æ–π –ø–æ–¥—Ö–æ–¥ –º–æ–∂–µ—Ç –±—ã—Ç—å –ø–æ–ª–µ–∑–µ–Ω –µ—Å–ª–∏ –≤ –ª—é–±–æ–º —Å–ª—É—á–∞–µ –∏–∑–º–µ—Ä–µ–Ω–∏—è –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –ø—Ä–æ–≤–µ—Å—Ç–∏ –±—ã—Å—Ç—Ä–æ, –Ω–æ –¥–ª—è —á–µ–≥–æ —Ç–æ—Ä–æ–ø–∏—Ç—å—Å—è —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä—É? –ß—Ç–æ–±—ã 1000 —Ä–∞–∑ –≤ —Å–µ–∫ –≤—ã–≤–µ—Å—Ç–∏ –≤ 1000 —Ä–∞–∑ –º–µ–Ω–µ–µ —Ç–æ—á–Ω—ã–π —Ä–µ–∑—É–ª—å—Ç–∞—Ç? –¢–∏–ø–∏—á–Ω—ã–π –ª—é–±–∏—Ç–µ–ª—å—Å–∫–∏–π —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä —Ä–µ–¥–∫–æ –æ–ø—É—Å–∫–∞–µ—Ç –≤—Ä–µ–º—è –∏–∑–º–µ—Ä–µ–Ω–∏—è –Ω–∏–∂–µ 0.1 —Å–µ–∫, –∏—Å–∫–ª—é—á–µ–Ω–∏—è –µ—Å—Ç—å, –Ω–æ —ç—Ç–æ —Å–∫–æ—Ä–µ–µ —Ä–µ–∂–∏–º—ã –¥–ª—è –≥–∞–ª–æ—á–∫–∏, –∫–æ—Ç–æ—Ä—ã–µ –æ—Å—Ç–∞—é—Ç—Å—è –Ω–µ–≤–æ—Å—Ç—Ä–µ–±–æ–≤–∞–Ω–Ω—ã–º–∏.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Å–µ–Ω 10, 2017 17:02:56
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–û –∞—Ä–∏—Ñ–º–µ—Ç–∏–∫–µ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–æ–≤
–õ.–ò. –∏ FC-510 - –∂–∏–≤–µ—Ö–æ–Ω—å–∫–∏–π —Ñ–æ—Ä—É–º —Å —É—á–∞—Å—Ç–∏–µ–º —Å–∞–º–æ–≥–æ
http://www.diod.club/forum/topic.php?fo ... pic=25&p=7 –æ—Ç—Ç—É–¥–∞:
–°–ø–æ–π–ª–µ—Ä A: –õ–µ–æ–Ω–∏–¥ –ò–≤–∞–Ω–æ–≤–∏—á, –∞ –≤—ã –∏—Å–ø–æ–ª—å–∑—É–µ—Ç–µ –≤ —Å–≤–æ–µ–π –ø—Ä–æ–≥—Ä–∞–º–º–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è FC-510 - —Ä–∞—Å—á–µ—Ç—ã —Å –ø–ª–∞–≤–∞—é—â–µ–π –∑–∞–ø—è—Ç–æ–π?–ö –Ω–∞—à–∏–º –±–∞—Ä–∞–Ω–∞–º:
–•–æ–±–∏–π–Ω–æ–º—É —á–∏—Å—Ç–æ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä—É, –∫–∞–∫ –≤—ã—Ä–∏—Å–æ–≤–∞–ª–æ—Å—å, —Ç–æ—á–Ω–æ—Å—Ç—å —Å–∏–ª—å–Ω–∞—è –Ω–µ –Ω–∞–¥–æ, –º–æ–∂–Ω–æ –Ω–∞ –Ω–∏–∑–∫–∏—Ö —á–∞—Å—Ç–æ—Ç–∞—Ö –æ–¥–∏–Ω –º–µ—Ç–æ–¥ - –æ–±—Ä–∞—Ç–Ω—ã–π, –Ω–∞ –≤—ã—Å–æ–∫–∏—Ö - –ø—Ä—è–º–æ–π. –ú–∏–Ω–∏–º—É–º –¥–µ—Ç–∞–ª–µ–π –∏ –æ–±—ã—á–Ω—ã–π –∫–≤–∞—Ä—Ü –æ—á–µ–Ω—å —Ö–æ—Ä–æ—à–æ —Ç–æ–∂–µ, –ø–æ–∫–∞ –¥–ª—è —Ö–æ–±–±–∏. –ü–æ—Ç–æ–º —Ö–æ–±–±–∏—Å—Ç –º–æ–∂–µ—Ç –ø—Ä–∏–º–µ–Ω–∏—Ç—å –ø–æ–ª—É—á–µ–Ω–Ω—ã–µ –∑–Ω–∞–Ω–∏—è –ø—Ä–æ—Ñ–µ—Å—Å–∏–æ–Ω–∞–ª—å–Ω–æ —Å –ø–æ–≤—ã—à–µ–Ω–∏–µ–º —Ç–æ—á–Ω–æ—Å—Ç–∏ - –∑–Ω–∞—Ç—å —Ü–µ–ª—ã—Ö –¥–≤–∞ –º–µ—Ç–æ–¥–∞ —ç—Ç–æ –∑–∞—á–µ—Ç –ø—Ä–∏ –ø—Ä–∏–µ–º–µ –Ω–∞ —Ä–∞–±–æ—Ç—É.
–¢–µ–æ—Ä–∏—è –ø—Ä—è–º–æ–≥–æ/–æ–±—Ä–∞—Ç–Ω–æ–≥–æ —Å—á–µ—Ç–∞ –∏ –∞–Ω–∞–ª–æ–≥–æ–≤—ã–π –∏–Ω—Ç–µ—Ä–ø–æ–ª—è—Ç–æ—Ä –¥–æ—Å—Ç—É–ø–Ω—ã–º —è–∑—ã–∫–æ–º –≤ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –æ—Ç –õ.–ò.:
http://www.leoniv.diod.club/projects/me ... fc-510.pdf —á—Ç–æ –∂ –∑–∞ —á—É–¥–æ –∏–Ω—Ç–µ—Ä–ø–æ–ª—è—Ç–æ—Ä, –Ω–∞–¥–æ –≤—Å–µ–≥–æ 2 –≤–Ω–µ—à–Ω–∏—Ö –ª–æ–≥–∏—á–µ—Å–∫–∏—Ö —Å —Ç—Ä–∏–≥–≥–µ—Ä–∞–º–∏:
http://leoniv.livejournal.com/129151.html —Ç—É–¥–∞ –∂–µ:
viewtopic.php?p=3177210#p3177210 –¢—É—Ç –Ω–∞—à–µ–ª –µ—â–µ:
–í–æ—Ç —Ç–µ–æ—Ä–∏—è, –æ—Ç GM:
–ò–∑–º–µ—Ä–µ–Ω–∏–µ —á–∞—Å—Ç–æ—Ç—ã —Å –ø–æ–º–æ—â—å—é –∞–≤—Ä –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞
–°–ø–æ–π–ª–µ—Ä 1) –í–≤–µ–¥—ë–º –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–∏—è
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
RusikOk
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Å–µ–Ω 10, 2017 17:26:07
–ù–∞—à–µ–ª —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä. –ü–æ–Ω—é—Ö–∞–ª.
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω —è–Ω–≤ 24, 2011 01:51:48–°–æ–æ–±—â–µ–Ω–∏–π: 197–û—Ç–∫—É–¥–∞: –£–∫—Ä–∞–∏–Ω–∞, –ö–∏–µ–≤
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–∞ —Å–∞–º–æ–º –¥–µ–ª–µ –º–æ–π –ø–µ—Ä–≤—ã–π –ø—Ä–æ–µ–∫—Ç –Ω–∞ STM32, –µ—Å–ª–∏ –µ–≥–æ –º–æ–∂–Ω–æ —Ç–∞–∫–æ–≤—ã–º –Ω–∞–∑–≤–∞—Ç—å, –±—ã–ª –õ–ê –Ω–∞ 20-—Ç–∏ –Ω–æ–≥–æ–º F030. 8 —Ü–∏—Ñ—Ä–æ–≤—ã—Ö –∫–∞–Ω–∞–ª–æ–≤, 19.2 MSPS, –æ–¥–∏–Ω –∞–Ω–∞–ª–æ–≥–æ–≤—ã–π, ~4.4 MSPS, –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä(PWM) –¥–æ 48MHz, —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä –¥–æ 48MHz –∏ –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä AVR
–ß–∞—Å—Ç–æ—Ç–æ–º–µ—Ä –∫–æ–Ω–µ—á–Ω–æ –Ω–µ —Ç–∞–∫–æ–π —Ç–æ—á–Ω—ã–π, –Ω–æ —Ç–∞–º –∏ –∫–≤–∞—Ä—Ü –æ–±—ã—á–Ω—ã–π, –¥–ª—è –±–æ–ª—å—à–∏–Ω—Å—Ç–≤–∞ –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–π –µ–≥–æ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ. –ò –≤—Å–µ —ç—Ç–æ –±–µ–∑ —ç–∫—Ä–∞–Ω–∞, –ø–æ–¥–∫–ª—é—á–∞–ª–æ—Å—å –∫ –∫–æ–º–ø—É —á–µ—Ä–µ–∑ USB, –æ–±—â–∞—è —Å—Ç–æ–∏–º–æ—Å—Ç—å –¥–µ—Ç–∞–ª–µ–π ~1.5$. –ü–æ–¥–∞—Ä–∏–ª —Ç–æ–≤–∞—Ä–∏—â—É, —Å–æ–±—Ä–∞–ª –±–æ–ª–µ–µ –ø—Ä–æ–¥–≤–∏–Ω—É—Ç—É—é –º–æ–¥–µ–ª—å –Ω–∞ F303, –ø–æ–¥–∞—Ä–∏–ª –¥—Ä—É–≥–æ–º—É —Ç–æ–≤–∞—Ä–∏—â—É, —Ö–æ—Ç—è —á–∏—Å—Ç—ã–π F303 –º–Ω–µ –≤–µ—Ä–Ω—É–ª–∏, –ø–µ—Ä–µ–ø–∏—Å–∞–ª —á–∞—Å—Ç—å –∫–æ–¥–∞ –ø–æ–¥ F4, —É–±–µ–¥–∏–ª—Å—è, —á—Ç–æ 130 MSPS –¥–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ –¥–æ—Å—Ç–∏–∂–∏–º—ã –∏ –æ—Ç–ª–æ–∂–∏–ª –¥–æ –ª—É—á—à–∏—Ö –≤—Ä–µ–º–µ–Ω. –ê –Ω–∞–¥–æ –±—ã–ª–æ —Å–æ–±—Ä–∞—Ç—å –∏ –≥–¥–µ-—Ç–æ –≤—ã–ª–æ–∂–∏—Ç—å, —á—Ç–æ–±—ã —Å –∫–µ–º-—Ç–æ –∫–æ–Ω–∫—É—Ä–∏—Ä–æ–≤–∞—Ç—å?
–∑–∞–∏–Ω—Ç–µ—Ä–µ—Å–æ–≤–∞–ª–∏ –í–∞—à–∏ —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ –∫–∞–∫ –º–æ–∂–Ω–æ —Å–æ –≤—Å–µ–º —ç—Ç–∏–º –æ–∑–Ω–∞–∫–æ–º–∏—Ç—å—Å—è?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
–í—ã–±–∏—Ä–∞–µ–º –∏–Ω–¥—É—Å—Ç—Ä–∏–∞–ª—å–Ω—ã–µ –∏ –º–µ–¥–∏—Ü–∏–Ω—Å–∫–∏–µ –∏—Å—Ç–æ—á–Ω–∏–∫–∏ –ø–∏—Ç–∞–Ω–∏—è MEAN WELL –≤ –æ—Ç–∫—Ä—ã—Ç–æ–º –∏—Å–ø–æ–ª–Ω–µ–Ω–∏–∏
–ò—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –º–æ–¥—É–ª—å–Ω—ã—Ö –∏—Å—Ç–æ—á–Ω–∏–∫–æ–≤ –ø–∏—Ç–∞–Ω–∏—è –æ—Ç–∫—Ä—ã—Ç–æ–≥–æ —Ç–∏–ø–∞ —à–∏—Ä–æ–∫–æ —Ä–∞—Å–ø—Ä–æ—Å—Ç—Ä–∞–Ω–µ–Ω–æ –≤ —Å–æ–≤—Ä–µ–º–µ–Ω–Ω—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞—Ö. –ü—Ä–∏—Å—É—â–∏–µ –∏–º –∫–æ–º–ø–∞–∫—Ç–Ω–æ—Å—Ç—å, –≥–∏–±–∫–æ—Å—Ç—å –≤ –∏–Ω—Ç–µ–≥—Ä–∞—Ü–∏–∏ –∏ –≤—ã—Å–æ–∫–∞—è —ç—Ñ—Ñ–µ–∫—Ç–∏–≤–Ω–æ—Å—Ç—å –¥–µ–ª–∞—é—Ç –∏—Ö –æ—Ç–ª–∏—á–Ω—ã–º —Ä–µ—à–µ–Ω–∏–µ–º –¥–ª—è —Å–∏—Å—Ç–µ–º –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω–æ–π –∞–≤—Ç–æ–º–∞—Ç–∏–∑–∞—Ü–∏–∏, —Ç–µ–ª–µ–∫–æ–º–º—É–Ω–∏–∫–∞—Ü–∏–æ–Ω–Ω–æ–≥–æ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏—è, –º–µ–¥–∏—Ü–∏–Ω—Å–∫–æ–π —Ç–µ—Ö–Ω–∏–∫–∏, —É—Å—Ç—Ä–æ–π—Å—Ç–≤ ¬´—É–º–Ω–æ–≥–æ –¥–æ–º–∞¬ª –∏ –ø—Ä–æ—á–∏—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π. –Ý–∞—Å—Å–º–æ—Ç—Ä–∏–º –ø–æ–¥—Ä–æ–±–Ω–µ–µ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ –∏ –æ—Å–æ–±–µ–Ω–Ω–æ—Å—Ç–∏ —Ç—Ä–µ—Ö —Å–∞–º—ã—Ö –ø–æ–ø—É–ª—è—Ä–Ω—ã—Ö –≤–∞—Ä–∏–∞–Ω—Ç–æ–≤ AC/DC-–ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª–µ–π MW –æ—Ç–∫—Ä—ã—Ç–æ–≥–æ —Ç–∏–ø–∞, –ø–æ–¥—Ö–æ–¥—è—â–∏—Ö –¥–ª—è –ø—Ä–∏–º–µ–Ω–µ–Ω–∏—è –≤ –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞—Ö - —Å–µ—Ä–∏–π EPS, EPP –∏ RPS –ø—Ä–µ–¥—Å—Ç–∞–≤–ª–µ–Ω–Ω—ã—Ö –Ω–∞ Meanwell.market.
–ü–æ–¥—Ä–æ–±–Ω–µ–µ>>
–ö–Ý–ê–ú
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Å–µ–Ω 10, 2017 17:36:17
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 139
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2918
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —è–Ω–≤ 10, 2008 22:01:02–°–æ–æ–±—â–µ–Ω–∏–π: 23868–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–æ–≤—Å–∫–∞—è –æ–±–ª–∞—Å—Ç—å, –§—Ä—è–∑–∏–Ω–æ
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–µ—Å–ª–∏, –∫–∞–∫ —Ç—ã –ø—Ä–µ–¥–ª–∞–≥–∞–µ—à—å, –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å –∏–∑–º–µ—Ä–µ–Ω–∏—è –∑–∞ –æ—á–µ–Ω—å –º–∞–ª—ã–π –∏–∑–º–µ—Ä–∏—Ç–µ–ª—å–Ω—ã–π –∏–Ω—Ç–µ—Ä–≤–∞–ª, –Ω–∞–ø—Ä–∏–º–µ—Ä, –∑–∞ 1ms, —Ç–æ –∏—Ö –±—É–¥–µ—Ç –≤—Å–µ–≥–æ 4
–ß–∏—Å–ª–∞ –≤—ã—Å–æ—Å–∞–Ω—ã –∏–∑ –ø–∞–ª—å—Ü–∞. –ù–∏—á–µ–≥–æ —Ç–∞–∫–æ–≥–æ —è –Ω–µ –ø—Ä–µ–¥–ª–∞–≥–∞–ª.
–£ –º–µ–Ω—è (–Ω–∞–ø—Ä–∏–º–µ—Ä) –µ—Å—Ç—å –∑–∞–¥–∞—á–∞ –∏–∑–º–µ—Ä—è—Ç—å —Ä–µ–∑–æ–Ω–∞–Ω—Å–Ω—É—é —á–∞—Å—Ç–æ—Ç—É –Ω–µ–∫–æ–µ–≥–æ –∫–æ–Ω—Ç—É—Ä–∞ –ø—Ä–∏ —É–¥–∞—Ä–Ω–æ–º –≤–æ–∑–±—É–∂–¥–µ–Ω–∏–∏, –∫–æ–≥–¥–∞ –∏–º–µ–µ–º –≤—Å–µ–≥–æ –æ–∫–æ–ª–æ 15...20 –ø–µ—Ä–∏–æ–¥–æ–≤ –∏–∑–º–µ—Ä—è–µ–º–æ–π —á–∞—Å—Ç–æ—Ç—ã. –ß–∞—Å—Ç–æ—Ç–∞ –æ–∫–æ–ª–æ 60 –∫–ì—Ü, –∑–Ω–∞—á–∏—Ç –≤—Ä–µ–º—è –∏–∑–º–µ—Ä–µ–Ω–∏—è —Å–æ—Å—Ç–∞–≤–∏—Ç –ø—Ä–∏–º–µ—Ä–Ω–æ 300 –º–∫—Å, –∞ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ/—Ç–æ—á–Ω–æ—Å—Ç—å —Ç—Ä–µ–±—É–µ—Ç—Å—è 1 –ì—Ü. –û–ø–æ—Ä–Ω–∞—è —á–∞—Å—Ç–æ—Ç–∞ - 40–ú–ì—Ü (25 –Ω—Å), —Å–∏—Ä–µ—á—å 12000 –ø–æ–ø—É–≥–∞–µ–≤ (5 –ì—Ü)- —ç—Ç–æ –ø—Ä–µ–¥–µ–ª –±–µ–∑ –∏–Ω—Ç–µ—Ä–ø–æ–ª—è—Ç–æ—Ä–∞.
–ó–´. –ö —Å–ª–æ–≤—É, –∏–∑–º–µ—Ä–∏—Ç–µ–ª—å —è–≤–ª—è–µ—Ç—Å—è –∫–æ–Ω—Ç—Ä–æ–ª—å–Ω—ã–º –ø—Ä–∏ –∏–∑–≥–æ—Ç–æ–≤–ª–µ–Ω–∏–∏ –Ω–µ–∫–æ–µ–π –ø—Ä–æ–¥—É–∫—Ü–∏–∏. –¢–æ –µ—Å—Ç—å –Ω–∞ –æ—Å–Ω–æ–≤–µ –µ–≥–æ –∏–∑–º–µ—Ä–µ–Ω–∏–π –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –ø–æ–¥—Å—Ç—Ä–æ–π–∫–∞ —Å—Ç–∞–Ω–∫–∞ –∏ –æ—Ç–±—Ä–∞–∫–æ–≤–∫–∞ –ø—Ä–æ–¥—É–∫—Ü–∏–∏ –≤ –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–æ–º —Ä–µ–∂–∏–º–µ.
–ò–∑–º–µ—Ä–µ–Ω–∏–µ —Ä–µ–∑–æ–Ω–∞–Ω—Å–Ω–æ–π —á–∞—Å—Ç–æ—Ç—ã –∫–æ–Ω—Ç—É—Ä–æ–≤ —É–¥–∞—Ä–Ω—ã–º –º–µ—Ç–æ–¥–æ–º - —Ä–∞—Å–ø—Ä–æ—Å—Ç—Ä–∞–Ω–µ–Ω–Ω–∞—è –∑–∞–¥–∞—á–∞. –ò –Ω–µ—Ö–≤–∞—Ç–∫–∞ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è –∏–∑-–∑–∞ –æ–≥—Ä–∞–Ω–∏—á–µ–Ω–Ω–æ–≥–æ —á–∏—Å–ª–∞ –ø–µ—Ä–∏–æ–¥–æ–≤ —Å–∏–≥–Ω–∞–ª–∞ –ø—Ä–∏ –Ω–µ–≤—ã—Å–æ–∫–æ–π –¥–æ–±—Ä–æ—Ç–Ω–æ—Å—Ç–∏ - —Ç–æ–∂–µ —Ç–∏–ø–∏—á–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 07:41:13
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
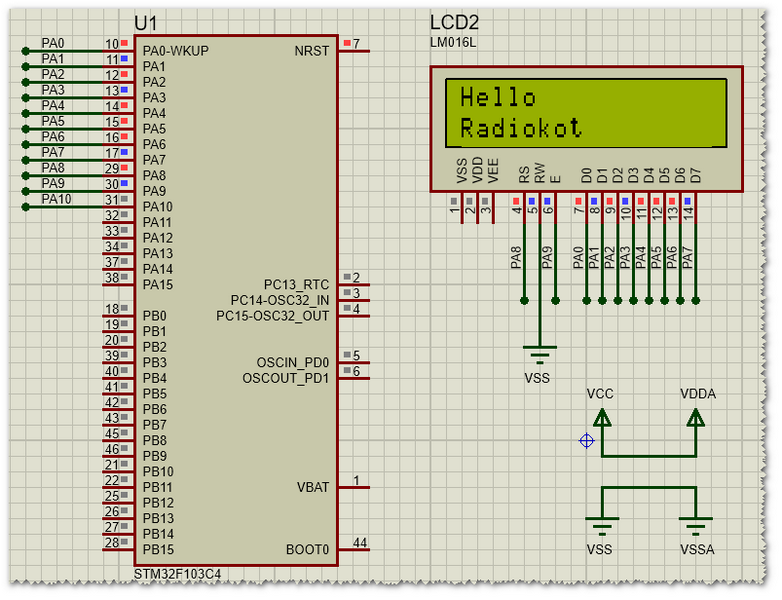
–¢–µ–æ—Ä–∏–∏ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–Ω–æ–π —á—É—Ç—å –ø–æ–¥—á–∏—Ç–∞–ª–∏, –º–æ–∂–Ω–æ –ø–æ—Ç–∏—Ö–æ–Ω—å–∫—É –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç—å –∫ –ø—Ä–∞–∫—Ç–∏–∫–µ. –ù–µ–∫–æ–≥–¥–∞ –ø–æ–∫–∞ –º–∞–∫–µ—Ç –ø–∞—è—Ç—å - –ø–æ—Å–º–æ—Ç—Ä–µ–ª –ü—Ä–æ—Ç–µ—É—Å —Å—Ç–∞–ª –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞—Ç—å STM32, –ø—Ä–∞–≤–¥–∞ –ø–æ–∫–∞ —Å–µ—Ä–∏—é F1. –ü–æ–ø—Ä–æ–±—É–µ–º –ø–æ—Å–∏–º—É–ª–∏—Ä–æ–≤–∞—Ç—å —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä –≤ –ü—Ä–æ—Ç–µ—É—Å–µ, –Ω–µ–∏–∑–≤–µ—Å—Ç–Ω–æ –Ω–æ—Ä–º–∞–ª—å–Ω–æ —Å–∏–º—É–ª–∏—Ä—É–µ—Ç –ª–∏ —Ç–∞–π–º–µ—Ä—ã, –∑–∞—Ö–≤–∞—Ç—ã –∏ –ø—Ä. - –Ω—É –º–æ–∂–µ—Ç —Ö–æ—Ç—å –º–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º —Å–º–æ–∂–µ–º. –ù–∞–º–∞–ª–µ–≤–∞–ª —Å—Ö–µ–º–∫—É —Å –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä–æ–º:
–ê–Ω–∞–ª–æ–≥–æ–≤–æ–µ –ø–∏—Ç–∞–Ω–∏–µ –ø—Ä–∏—à–ª–æ—Å—å —Ç–∞–∫ –ø–æ–¥—Å–æ–µ–¥–∏–Ω–∏—Ç—å –∏–±–æ —Ä—É–≥–∞–ª–æ—Å—å. –î–∞–ª–µ–µ –±–ª–∏–Ω–∫–∞—é—â—É—é –ø—Ä–æ–≥—Ä–∞–º–º–∫—É –ø–æ —Å–≤–æ–±–æ–¥–µ –Ω–∞–ø–∏—à—É, —Å F1 –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–∏ –¥–µ–ª–∞ –Ω–µ –∏–º–µ–ª - –æ—á–µ–Ω—å –¥–∞–≤–Ω–æ –Ω–∞ –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç–∫–µ –∑–∞–ø—É—Å–∫–∞–ª —á—É–∂–∏–µ –ø—Ä–∏–º–µ—Ä—á–∏–∫–∏ –¥–ª—è F1, –≤—Å–µ –∞–±—Å–æ–ª—é—Ç–Ω–æ –∑–∞–±—ã–ª–æ—Å—å, –±—É–¥–µ–º –æ–ø—è—Ç—å —É—á–∏—Ç—å—Å—è.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
abc
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 09:46:16
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 55
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 389
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 20, 2008 01:06:40–°–æ–æ–±—â–µ–Ω–∏–π: 3245–û—Ç–∫—É–¥–∞: –°–µ–≤–∞—Å—Ç–æ–ø–æ–ª—å
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–í–æ—Ç, –∫—Å—Ç–∞—Ç–∏, —Ç–∏–ø–∏—á–Ω–µ–π—à–∏–π –ø–æ–¥—Ö–æ–¥ –Ω–µ –Ω–æ–≤–∏—á–∫–∞, –Ω–æ –ª–∞–º–µ—Ä–∞ (—Å–æ—Ä—Ä–∏, —ç—Ç–æ –Ω–µ –∫ –≤–∞–º –ª–∏—á–Ω–æ).
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 10:26:56
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¥—ã–∫ –ª–µ–∂–∏—Ç –ø–µ—Ä–µ–¥–æ –º–Ω–æ–π —Ç–∞–∫–æ–π –º–æ–¥—É–ª—å:
STM32F103C8T6 –±—ã–ª–æ US $1.68 / —à—Ç. —Å–µ–π—á–∞—Å –Ω–µ–¥–æ—Å—Ç—É–ø–Ω–æ - —Ä–∞–∑–≥—Ä–µ–±–ª–∏
https://ru.aliexpress.com/store/product ... 85935.html –ø—Ä–æ—Å—Ç–æ –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ —á—Ç–æ –Ω–æ–≤—ã–π –ø—Ä–æ—Ç–µ—É—Å —Å–º–æ–≥–µ—Ç, –ø–µ—Ä–µ–Ω–µ—Å—Ç–∏ –≤ —Ä–µ–∞–ª –∑–∞–ø—Ä–æ—Å—Ç–æ –º–æ–∂–Ω–æ
–ü–ª–∞–Ω–∏—Ä–æ–≤–∞–ª–æ—Å—å –≤–æ–æ–±—â–µ –≤—Å–µ —Å–¥–µ–ª–∞—Ç—å –Ω–∞ —Å–∞–º–æ–º –¥–µ—à–µ–≤–æ–º STM32F030F4P6.
–ó–∞–∫–∞–∑–∞–ª —É–∂–µ –ø–æ–¥–æ–±–Ω—ã–π –º–æ–¥—É–ª—å –Ω–∞ STM32F030F4P6:
https://ru.aliexpress.com/item/48MHz-ST ... 21744.html –ü–∞—è—Ç—å –Ω–∞ –º–æ—Ç–∞–∂–∫–∞—Ö –æ–±–ª–µ–Ω–∏–ª—Å—è - –≤—Å—è–∫–∏ –¥–∏—Å–∫–∞–≤–µ—Ä–∏ –∏ –Ω—É–∫–ª–µ–æ —Ä–∞–∑–±–∞–ª–æ–≤–∞–ª–∏ + –±–µ—Å–ø–∞–µ—á–Ω—ã–µ –º–∞–∫–µ—Ç–∫–∏.
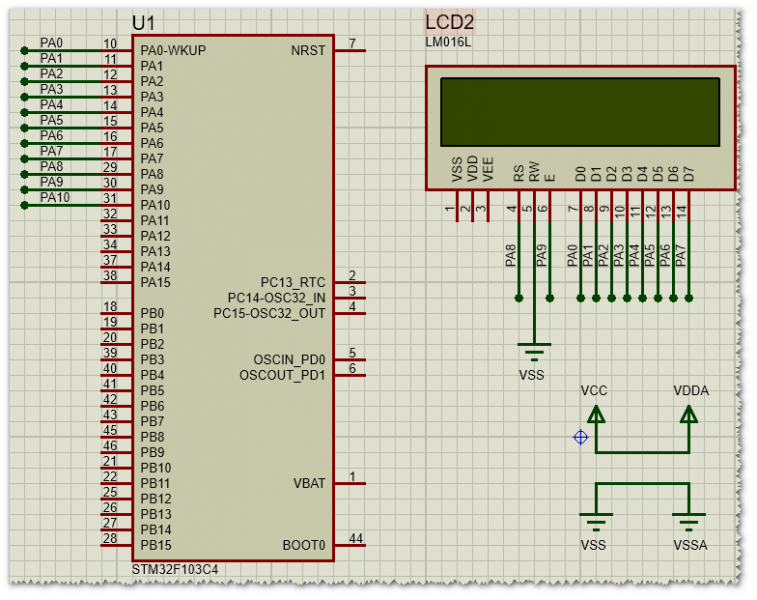
–∑.—ã. –ø—Ä–æ—Ç–µ—É—Å, —É–∂–µ –≤—ã—è—Å–Ω–∏–ª, –º–æ–≥–µ—Ç –ø–æ—Ä—Ç—ã –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞—Ç—å, –¥—Ä—ã–≥–∞—Ç—å –Ω–æ–≥–æ–π, —Å–∏—Å—Ç–∏–∫ —Ç–æ–∂ —Å–∏–º—É–ª–∏—Ä—É–µ—Ç—Å—è:
—Å–æ—Ñ—Ç–∏–∫ –º–∏–≥–∞–Ω–∏—è:
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
#include "stm32f1xx.h"
–ø–æ–∫–∞ –Ω–∏—á–µ–≥–æ —Å—Ç—Ä–∞—à–Ω–æ–≥–æ, –ø–æ—á—Ç–∏ –≤—Å–µ –∫–∞–∫ –∏ —É –≤–æ—Å—å–º–∏–±–∏—Ç–Ω–∏–∫–æ–≤, –¥–∞–ª—å—à–µ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä –ø–æ–ø—Ä–æ–±—É–µ–º –∑–∞–ø—É—Å—Ç–∏—Ç—å
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 10:41:55
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2116
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18399–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 2
oleg110592 –ø–∏—Å–∞–ª(–∞):
–ø–æ–∫–∞ –Ω–∏—á–µ–≥–æ —Å—Ç—Ä–∞—à–Ω–æ–≥–æ
–∞ —è —É–∂–µ –¥—Ä–æ–∂—É: –Ω–µ—É–∂–µ–ª–∏ –º–∏—Ä —É–≤–∏–¥–∏—Ç –ª—é–±–∏—Ç–µ–ª—å—Å–∫–∏–π –ø—Ä–æ–µ–∫—Ç, –∏—Å–ø–æ–ª—å–∑—É—é—â–∏–π –≤—Å—é –º–æ—â—å ARM?!
–∏ —ç—Ç–æ –±—É–¥–µ—Ç –Ω–µ—á—Ç–æ —Ä–µ–∞–ª—å–Ω–æ –ø–æ–ª–µ–∑–Ω–æ–µ –±–µ–∑ –±–ª—ç–∫–¥–∂–µ–∫–∞ –∏ –¥–µ–≤—É—à–µ–∫ —Å –Ω–∏–∑–∫–æ–π —Å–æ—Ü–∏–∞–ª—å–Ω–æ–π –æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ—Å—Ç—å—é?!
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 10:52:05
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—É–≤—ã, –Ω–µ –ø–æ—Ä–∞–¥—É—é - —Å–ø–µ—Ü–∏–∞–ª—å–Ω–æ –¥–æ–±–∞–≤–ª—é MP3 –¥–µ–∫–æ–¥–∏—Ä–æ–≤–∞–Ω–∏–µ - –±—É–¥–µ—Ç —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä –ø—Ä–æ–∏–≥—Ä—ã–≤–∞—Ç—å –º—É–∑—ã—á–∫—É –≤ –ø–∞—É–∑–∞—Ö –º–µ–∂–¥—É –∏–∑–º–µ—Ä–µ–Ω–∏—è–º–∏, –≥–æ–ª–æ—Å–æ–º —Ä–µ–∑—É–ª—å—Ç–∞—Ç—ã –∏–∑–º–µ—Ä–µ–Ω–∏–π —Å–æ–æ–±—â–∞—Ç—å. –ù—É –∏ –∫–æ–Ω–µ—á–Ω–æ –ø–æ –∏–Ω—Ç–µ—Ä–Ω–µ—Ç—É –º–æ–∂–Ω–æ –±—É–¥–µ—Ç –ø–æ–ª—É—á–∞—Ç—å —Ä–µ–∑—É–ª—å—Ç–∞—Ç—ã –∏ –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞—Ç—å –∏ –ø–µ—Ä–µ–≥—Ä—É–∂–∞—Ç—å - –±—É–¥–µ—Ç –ø–æ–ª–Ω—ã–π IoT.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Satyr
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 11:03:18
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 26
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 108
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –Ω–æ—è 04, 2010 01:56:36–°–æ–æ–±—â–µ–Ω–∏–π: 7439–û—Ç–∫—É–¥–∞: –≥. –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
oleg110592 –ø–∏—Å–∞–ª(–∞):
–ø–æ–∫–∞ –Ω–∏—á–µ–≥–æ —Å—Ç—Ä–∞—à–Ω–æ–≥–æ
–∞ —è —É–∂–µ –¥—Ä–æ–∂—É: –Ω–µ—É–∂–µ–ª–∏ –º–∏—Ä —É–≤–∏–¥–∏—Ç –ª—é–±–∏—Ç–µ–ª—å—Å–∫–∏–π –ø—Ä–æ–µ–∫—Ç, –∏—Å–ø–æ–ª—å–∑—É—é—â–∏–π –≤—Å—é –º–æ—â—å ARM?!
–∏ —ç—Ç–æ –±—É–¥–µ—Ç –Ω–µ—á—Ç–æ —Ä–µ–∞–ª—å–Ω–æ –ø–æ–ª–µ–∑–Ω–æ–µ –±–µ–∑ –±–ª—ç–∫–¥–∂–µ–∫–∞ –∏ –¥–µ–≤—É—à–µ–∫ —Å –Ω–∏–∑–∫–æ–π —Å–æ—Ü–∏–∞–ª—å–Ω–æ–π –æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ—Å—Ç—å—é?!
–ì–∞–≤–Ω–æ –≤–æ–ø—Ä–æ—Å - —Å–º–æ—Ç—Ä–∏ –ª—é–±–æ–π –ª—é–±–∏—Ç–µ–ª—å—Å–∫–∏–π –æ–ø–µ–Ω—Å–æ—É—Ä—Å–Ω—ã–π –ª–µ—Ç–Ω—ã–π –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –¥–ª—è –∫–≤–∞–¥—Ä–æ–∫–æ–ø—Ç–µ—Ä–∞
–î–æ–±–∞–≤–ª–µ–Ω–æ after 8 minutes 12 seconds: –ï—â–µ —Å–æ "–≤—Å–µ–π –º–æ—â—å", –µ—â–µ –ª–µ—Ç 8 –Ω–∞–∑–∞–¥, —Ç–æ–≥–¥–∞ –º–Ω–µ –Ω–µ –æ—Å–æ–±–æ —Ö–≤–∞—Ç–∞–ª–æ —Ç–æ–ø–æ–≤–æ–≥–æ AVR32, –∞ –∫–æ—Ä—Ç–µ–∫—Å—ã —Ç–æ–ª—å–∫–æ —Ç–æ–ª—å–∫–æ –≤—ã—Ö–æ–¥–∏–ª–∏, –∞ 7TDMI –±—ã–ª –æ—á–µ–Ω—å —É–Ω—ã–ª...
–í–æ–±—â–µ–º, –µ—Å–ª–∏ –∫—Ç–æ –ø–æ–º–Ω–∏—Ç, –∫–æ–≥–¥–∞ –Ω–µ –±—ã–ª–æ —Å—á–∏—Ç–∞–π —Å–º–∞—Ä—Ç—Ñ–æ–Ω–æ–≤, –∞ –≥—É–≥–ª–º–∞–ø –±—ã–ª —Ç–æ–ª—å–∫–æ –≤ –Ω–∞ –Ω–∞—Å—Ç–æ–ª—å–Ω–∏–∫–∞—Ö, –±—ã–ª–æ —Ç–∞–∫–æ–µ —Ä–µ—à–µ–Ω–∏–µ –¥–ª—è –¥–ª—è –ª—é–±–∏—Ç–µ–ª–µ–π –ø–æ–ª–∞–∑–∏—Ç—å —Å –æ—Ñ—Ñ–ª–∞–π–Ω –∫–∞—Ä—Ç–∞–º–∏ –≤–Ω–µ –¥–æ—Ä–æ–≥–æ - OziExplorer. –ü–æ–¥ WinCE —Ä–∞–±–æ—Ç–∞–ª, –Ω–æ —É–∂ –æ—á–µ–Ω—å —ç—Ç–∏ —á—Ç—É–∫–∏ –º–µ–µ–µ–µ–¥–ª–µ–Ω–Ω–æ –≥—Ä—É–∑–∏–ª–∏—Å—å, –¥–æ–ª–≥–æ GPS –ª–æ–≤–∏–ª–∏ –∏ –æ—á–µ–Ω—å —à—É—Å—Ç—Ä–æ –±–∞—Ç–∞—Ä–µ—é –∫—É—à–∞–ª–∏.
–°–¥–µ–ª–∞–ª —è —Ç–æ–≥–¥–∞ –Ω–∞ 3.5" TFT, –ø–∞—Ä–µ –±–∞—Ç–∞—Ä–µ–π –æ—Ç –∞–π—Ñ–æ–Ω–∞ —Å –µ–±–µ—è –∏, –µ—Å–ª–∏ –ø—Ä–∞–≤–∏–ª—å–Ω–æ –ø–æ–º–Ω—é, AT32UC3C256 '–∞–ø–ø–∞—Ä–∞—Ç–Ω—ã–π' –û–∑–∏ –≤ –∫–æ—Ä–ø—É—Å–µ —Ç–æ–Ω–µ–Ω—å–∫–æ–π –º—ã–ª–Ω–∏—Ü—ã —Å –∫–∞—Ä—Ç–∞–º–∏ –Ω–∞ SD-card, —Å –≤—ã–Ω–æ—Å–Ω—ã–º USB GPS-mouse —Å —Ö–æ—Ä–æ—à–µ–π –∞–Ω—Ç–µ–Ω–æ–π -))
–í—ã–∫–ª—é—á–µ–Ω–Ω—ã–π –º–æ–≥ –≥–æ–¥–∞–º–∏ –±–µ–∑ –∑–∞—Ä—è–¥–∫–∏ –≤–∞–ª—è—Ç—å—Å—è, —Å—Ç–∞—Ä—Ç –∑–∞ –¥–µ—Å—è—Ç—É—é –¥–æ–ª—é —Å–µ–∫—É–Ω–¥—ã, —Ö–æ—Ç—è –ø–µ—Ä–≤–∏—á–Ω–∞—è –ª–æ–≤–ª—è GPS –±—ã–ª–∞, –∫–æ–Ω–µ—á–Ω–æ, –±–æ–ª—å—à–µ –º–∏–Ω—É—Ç—ã –∏–∑ —Ö–æ–ª–æ–¥–Ω–æ–≥–æ.
–û—Ç—Ä–∏—Å–æ–≤–∫–∞ –±—ã–ª–∞ –Ω–æ—Ä–º–∞–ª—å–Ω–æ, –Ω–æ –æ –ø–ª–∞–≤–Ω–æ–º –ø–æ–ø–∏–∫—Å–µ–ª—å–Ω–æ–º —Å–∫—Ä–æ–ª–µ, –∞ —É–∂ —Ç–µ–º –±–æ–ª–µ–µ –æ —Å–∫—Ä–æ–ª–µ —Å –∏–Ω–µ—Ä—Ü–∏–µ–π —Ä–µ—á—å –Ω–µ —à–ª–∞ -))
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 11:15:49
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–ª—è –ª—é–±–∏—Ç–µ–ª–µ–π IoT –ø—Ä–∏–≥–æ–¥–∏—Ç—Å—è (–∏–º—Ö–æ)
–ö–æ–º–ø–∞–Ω–∏—è Telit –≤—ã–ø—É—Å—Ç–∏–ª–∞ –Ω–æ–≤—ã–π –∫–∞—Ç–∞–ª–æ–≥ –º–æ–¥—É–ª–µ–π IoT, –∫–æ—Ç–æ—Ä—ã–π –±—ã–ª –ø–µ—Ä–µ–≤–µ–¥–µ–Ω –Ω–∞ —Ä—É—Å—Å–∫–∏–π —è–∑—ã–∫ —Å–ø–µ—Ü–∏–∞–ª–∏—Å—Ç–∞–º–∏ –∫–æ–º–ø–∞–Ω–∏–∏.
—Ç—É—Ç:
http://atoma.spb.ru/news/4162/novyj-kat ... ulej-telit
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Satyr
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 11:23:23
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 26
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 108
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –Ω–æ—è 04, 2010 01:56:36–°–æ–æ–±—â–µ–Ω–∏–π: 7439–û—Ç–∫—É–¥–∞: –≥. –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ï—Å–ª–∏ –±–µ–∑ –∞–π–≥–ª–æ–º—É—Ä–∞ –¥–ª—è –±–ª–æ–Ω–¥–∏–Ω–æ–∫, –≤ —ç—Ç–æ–º IOT–µ —á—Ç–æ—Ç–æ –±–æ–ª–µ–µ –≥–æ–¥–Ω–æ–µ —á–µ–º esp8266 –∑–∞ –ø–æ—Å–ª–µ–¥–Ω–∏–µ –ø–∞—Ä—É –ª–µ—Ç –≤—ã—à–ª–æ ?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 11:32:00
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ß–∏—Å–ª–∞ –≤—ã—Å–æ—Å–∞–Ω—ã –∏–∑ –ø–∞–ª—å—Ü–∞. –ù–∏—á–µ–≥–æ —Ç–∞–∫–æ–≥–æ —è –Ω–µ –ø—Ä–µ–¥–ª–∞–≥–∞–ª.
–ß–∏—Å–ª–∞ –∏ –Ω–µ –±—ã–ª–æ, –±—ã–ª "–æ—á–µ–Ω—å –º–∞–ª—ã–π –∏–∑–º–µ—Ä–∏—Ç–µ–ª—å–Ω—ã–π –∏–Ω—Ç–µ—Ä–≤–∞–ª", –ø–æ—Ç–æ–º—É —è –≤–∑—è–ª 1ms, –≤ —Ä–µ–∞–ª—å–Ω–æ–º –ø—Ä–æ–µ–∫—Ç–µ –æ–∫–∞–∑–∞–ª–æ—Å—å 300us, –æ—à–∏–±—Å—è –≤—Å–µ–≥–æ –≤ 3 —Ä–∞–∑–∞ –≤—ã–±–∏—Ä–∞—è –Ω–∞—É–≥–∞–¥. –ò —Ç—ã –æ–ø—è—Ç—å –ø—Ä–∏–≤–æ–¥–∏—à—å –ø—Ä–∏–º–µ—Ä –ø—Ä–æ–µ–∫—Ç–∞ –≤ –∫–æ—Ç–æ—Ä–æ–º –ø—Ä–∏—Ö–æ–¥–∏—Ç—Å—è –ø—Ä–æ–≤–æ–¥–∏—Ç—å –∏–∑–º–µ—Ä–µ–Ω–∏—è –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –±—ã—Å—Ç—Ä–æ, –∞ —è —Å—Ä–∞–∑—É —Å–∫–∞–∑–∞–ª, —á—Ç–æ –∏–º–µ–Ω–Ω–æ –≤ –ø–æ–¥–æ–±–Ω—ã—Ö —Å–ª—É—á–∞—è—Ö –±–æ–ª–µ–µ –ø—Ä–æ–¥–≤–∏–Ω—É—Ç—ã–µ —Ç–µ—Ö–Ω–∏–∫–∏ –∏ –º–æ–≥—É—Ç –±—ã—Ç—å –≤–æ—Å—Ç—Ä–µ–±–æ–≤–∞–Ω—ã... –Ý–µ–∞–ª—å–Ω—ã–µ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä—ã, –º–æ–∂–µ—Ç –∑–∞ —Ä–µ–¥–∫–∏–º –∏—Å–∫–ª—é—á–µ–Ω–∏–µ–º, –Ω–µ –∏–∑–º–µ—Ä—è—é—Ç —á–∞—Å—Ç–æ—Ç—É –∑–∞ –ø—Ä–æ–∏–∑–≤–æ–ª—å–Ω—ã–µ –∏ –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –Ω–µ–±–æ–ª—å—à–∏–µ –ø—Ä–æ–º–µ–∂—É—Ç–∫–∏ –≤—Ä–µ–º–µ–Ω–∏, –æ–Ω–∏ –ø—Ä–æ—Å—Ç–æ –¥–ª—è —ç—Ç–æ–≥–æ –Ω–µ –ø—Ä–µ–¥–Ω–∞–∑–Ω–∞—á–µ–Ω—ã, –∞ –¥—Ä—É–≥–∏–µ –∑–∞–¥–∞—á–∏ –º–æ–≥—É—Ç –¥–∏–∫—Ç–æ–≤–∞—Ç—å –∏ –¥—Ä—É–≥–∏–µ —Ä–µ—à–µ–Ω–∏—è, –≤ —Ç–æ–º —á–∏—Å–ª–µ –∏ –±–æ–ª–µ–µ –ø—Ä–æ—Å—Ç—ã–µ. –£ –º–µ–Ω—è –±—ã–ª–∞ —Ö–æ—Ä–æ—à–∞—è —Ç–æ—á–Ω–æ—Å—Ç—å –Ω–∞ –±–æ–ª—å—à–∏—Ö —á–∞—Å—Ç–æ—Ç–∞—Ö, –º–µ–Ω—è —É—Å—Ç—Ä–∞–∏–≤–∞–ª–∞ —Ç–æ—á–Ω–æ—Å—Ç—å +-1Hz –Ω–∞ –º–∞–ª—ã—Ö, –Ω–µ –Ω—É–∂–Ω–æ –º–Ω–µ —Ä–∞—Å—Å–∫–∞–∑—ã–≤–∞—Ç—å –æ –ø—Ä–µ–∏–º—É—â–µ—Å—Ç–≤–∞—Ö reciprocal counter, —è –æ –Ω–∏—Ö –ø—Ä–µ–∫—Ä–∞—Å–Ω–æ –æ—Å–≤–µ–¥–æ–º–ª–µ–Ω
–∑–∞–∏–Ω—Ç–µ—Ä–µ—Å–æ–≤–∞–ª–∏ –í–∞—à–∏ —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ –∫–∞–∫ –º–æ–∂–Ω–æ —Å–æ –≤—Å–µ–º —ç—Ç–∏–º –æ–∑–Ω–∞–∫–æ–º–∏—Ç—å—Å—è?
–ò–∑ –º–æ–µ–≥–æ –ø–æ—Å—Ç–∞ –≤—Ä–æ–¥–µ –∫–∞–∫ —Å–ª–µ–¥—É–µ—Ç, —á—Ç–æ —Å–∫–æ—Ä–µ–µ –≤—Å–µ–≥–æ –Ω–∏–∫–∞–∫ –≤ –≤–∏–¥—É –æ—Ç—Å—É—Ç—Å—Ç–≤–∏—è –º–æ–µ–π –ª–∏—á–Ω–æ–π –∑–∞–∏–Ω—Ç–µ—Ä–µ—Å–æ–≤–∞–Ω–Ω–æ—Å—Ç–∏.
–¢–µ–æ—Ä–∏–∏ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–Ω–æ–π —á—É—Ç—å –ø–æ–¥—á–∏—Ç–∞–ª–∏, –º–æ–∂–Ω–æ –ø–æ—Ç–∏—Ö–æ–Ω—å–∫—É –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç—å –∫ –ø—Ä–∞–∫—Ç–∏–∫–µ. –ù–µ–∫–æ–≥–¥–∞ –ø–æ–∫–∞ –º–∞–∫–µ—Ç –ø–∞—è—Ç—å - –ø–æ—Å–º–æ—Ç—Ä–µ–ª –ü—Ä–æ—Ç–µ—É—Å —Å—Ç–∞–ª –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞—Ç—å STM32, –ø—Ä–∞–≤–¥–∞ –ø–æ–∫–∞ —Å–µ—Ä–∏—é F1.
–£ F1 –±–æ–ª—å—à–µ —á–∞—Å—Ç–æ—Ç—ã, –≤ —ç—Ç–æ–º –ø–ª–∞–Ω–µ –æ–Ω –¥–∞–∂–µ –ø—Ä–µ–¥–ø–æ—á—Ç–∏—Ç–µ–ª—å–Ω–µ–µ, —Ç—É—Ç —É–∂–µ –Ω—É–∂–Ω–æ —Å–º–æ—Ç—Ä–µ—Ç—å —Ö–≤–∞—Ç–∏—Ç –ª–∏ —á–µ—Ç—ã—Ä–µ—Ö 16-—Ç–∏ –±–∏—Ç–Ω—ã—Ö —Ç–∞–π–º–µ—Ä–æ–≤ –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ reciprocal counting, –Ω–æ –∫–∞–∫ –º–∏–Ω–∏–º—É–º –∏—Ö —Ö–≤–∞—Ç–∏—Ç –¥–ª—è –æ–¥–Ω–æ–≤—Ä–µ–º–µ–Ω–Ω—ã—Ö –ø—Ä—è–º–æ–≥–æ —Å—á–µ—Ç–∞ –∏ –∏–∑–º–µ—Ä–µ–Ω–∏—è –ø–µ—Ä–∏–æ–¥–∞, —Å –ø–æ—Å–ª–µ–¥—É—é—â–∏–º –≤—ã–±–æ—Ä–æ–º –±–æ–ª–µ–µ –ø–æ–¥—Ö–æ–¥—è—â–µ–≥–æ –º–µ—Ç–æ–¥–∞ –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –ø–æ–ª—É—á–µ–Ω–Ω–æ–π —á–∞—Å—Ç–æ—Ç—ã.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 11:48:24
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–±–æ–ª–µ–µ –≥–æ–¥–Ω–æ–µ —á–µ–º esp8266
—ç—Ç–æ –Ω–µ —Å–æ–≤—Å–µ–º –¥–ª—è IoT (–¥–ª—è –ª—é–±–∏—Ç–µ–ª–µ–π —Ö–æ–±–±–∏—Å—Ç–æ–≤ –ø–æ–π–¥–µ—Ç) - –Ω–∞–¥–æ –º–æ–¥—É–ª—å —á—Ç–æ–± –æ—Ç –±–∞—Ç–∞—Ä–µ–π–∫–∏ 10 –ª–µ—Ç —Ä–∞–±–æ—Ç–∞–ª –∏ —Å–≤–æ—è —Å–ø–µ—Ü–∏—Ñ–∏–∫–∞, –≤–æ—Ç –Ω–∞–ø—Ä–∏–º–µ—Ä:
https://www.u-blox.com/en/product/sara-n2-series –ø–æ–∫–∞ —Å–æ —Å–æ–≤–º–µ—Å—Ç–∏–º–æ—Å—Ç—å—é —Ä–∞–∑–Ω—ã—Ö –∫–æ–º–ø–∞–Ω–∏–π –ø–ª–æ—Ö–æ, –Ω–æ –¥–µ—Ä–∂–∞—Ç—å —É—Ö–æ –≤–æ—Å—Ç—Ä–æ –∏ –ª—é–±–∏—Ç–µ–ª—å - —Ö–æ–±–±–∏—Å—Ç –∏–º—Ö–æ –¥–æ–ª–∂–µ–Ω
2
Reflector 20 –Ω–æ–≥ F0 –±–æ–ª–µ–µ –ª—é–±–∏—Ç–µ–ª—å—Å–∫–∏–π, –ø–æ–∫–∞ –º–æ–∂–Ω–æ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –æ–±–∫–∞—Ç–∞—Ç—å –ø—Ä—è–º–æ–π —Å—á–µ—Ç –≤ –ø—Ä–æ—Ç–µ—É—Å–µ - –ø–æ–ª—å–∑–∞ –º–æ–∂ –∫–æ–º—É –±—É–¥–µ—Ç, —Å—Ç—É–¥–µ–Ω—Ç–∞–º –Ω–∞–ø—Ä–∏–º–µ—Ä
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 11:56:47
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
20 –Ω–æ–≥ F0 –±–æ–ª–µ–µ –ª—é–±–∏—Ç–µ–ª—å—Å–∫–∏–π, –ø–æ–∫–∞ –º–æ–∂–Ω–æ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –æ–±–∫–∞—Ç–∞—Ç—å –ø—Ä—è–º–æ–π —Å—á–µ—Ç –≤ –ø—Ä–æ—Ç–µ—É—Å–µ - –ø–æ–ª—å–∑–∞ –º–æ–∂ –∫–æ–º—É –±—É–¥–µ—Ç, —Å—Ç—É–¥–µ–Ω—Ç–∞–º –Ω–∞–ø—Ä–∏–º–µ—Ä
–ü—Ä–æ—Ç–µ—É—Å, —Å—É–¥—è –ø–æ –¥–æ–∫–∞–º, –¥–∞–∂–µ F103C8 –Ω–µ –ø–æ–Ω–∏–º–∞–µ—Ç, —Ç–æ–ª—å–∫–æ –¥–æ F103–°6, –∞ —Ç–∞–º —Ç–∞–π–º–µ—Ä–∞ –¥–∞–∂–µ –Ω–µ 4, –∞ –≤—Å–µ–≥–æ 3.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Satyr
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 11:57:27
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 26
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 108
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –Ω–æ—è 04, 2010 01:56:36–°–æ–æ–±—â–µ–Ω–∏–π: 7439–û—Ç–∫—É–¥–∞: –≥. –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–Ω–∞–¥–æ –º–æ–¥—É–ª—å —á—Ç–æ–± –æ—Ç –±–∞—Ç–∞—Ä–µ–π–∫–∏ 10 –ª–µ—Ç —Ä–∞–±–æ—Ç–∞–ª –∏ —Å–≤–æ—è —Å–ø–µ—Ü–∏—Ñ–∏–∫–∞, –≤–æ—Ç –Ω–∞–ø—Ä–∏–º–µ—Ä:
https://www.u-blox.com/en/product/sara-n2-series –°—Ç–æ–∏—Ç –±–æ–ª—å—à–µ –∏–ª–∏ –º–µ–Ω—å—à–µ –∞–π—Ñ–æ–Ω–∞ ?
ESP —Å—Ç–æ–∏—Ç –æ–ø—Ç–æ–º —á–∏–ø —á—É—Ç—å –±–æ–ª—å—à–µ –±–∞–∫—Å–∞ - —Ö–æ—Ç—å –≤ –∫–∞–∂–¥—ã–π –≤—ã–∫–ª—é—á–∞—Ç–µ–ª—å –∏ —Ä–æ–∑–µ—Ç–∫—É –ø–æ–Ω–∞–≤—Ç—ã–∫–∞–π.
–ê —ç—Ç–∏ –≤–∞—à–∏ –Ω–∞—á–∏–Ω–∫–∏ —Å–º–∞—Ä—Ç—Ñ–æ–Ω—ã –≤ –≥–∞–±–∞—Ä–∏—Ç–∞—Ö –∫–æ—Ä–æ–±–∫–∏ —Å–∏–≥–∞—Ä–µ—Ç... –Ω–µ —É–¥–∏–≤–∏—Ç–µ–ª—å–Ω–æ, —á—Ç–æ –ø–æ—Ç–æ–º –∫–æ–º–ª–ø–µ–∫—Ç '—É–º–Ω–æ–≥–æ –¥–æ–º–∞' –≤—ã—Ö–æ–¥–∏—Ç –≤ 200-400—Ç—Ä
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Å–µ–Ω 11, 2017 12:13:36
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ø–æ—Ä—è–¥–æ–∫ —Ü–µ–Ω –º–µ–Ω—å—à–µ, –≤—Ä–æ–¥–µ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞–ª–∏:
http://worldiot.ru/2017/04/umnaya-kvart ... 20000-rub/ –ø–æ —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä—É:
–¥–ª—è –ø—Ä—è–º–æ–≥–æ —Å—á–µ—Ç–∞ –∏ 3 —Ö–≤–∞—Ç–∏—Ç, –∞ –µ—Å–ª–∏ –ø—Ä–æ—Ç–µ—É—Å —Å –≤–Ω–µ—à–Ω–µ–π –Ω–æ–≥–∏ —Å—á–∏—Ç–∞—Ç—å —Ç–∞–π–º–µ—Ä–æ–º –≤–æ–æ–±—â–µ –Ω–µ —Å–º–æ–≥–µ—Ç - –Ω–∞ –∂–µ–ª–µ–∑–∫—É –ø–µ—Ä–µ–π–¥–µ–º, —É –º–µ–Ω—è –µ—â–µ –Ω–∞ F051 —Ç–∞–∫–µ –ª–µ–∂–∏—Ç:
upd:
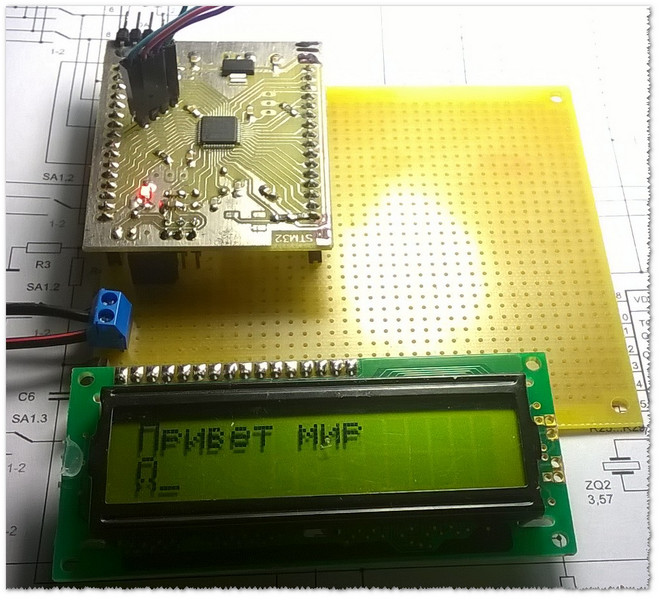
–ø–æ–ø—Ä–æ–±–æ–≤–∞–ª –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä —Å –ø–µ—Ä–≤–æ–π –ø–æ–ø–∞–≤—à–µ–π –∑–∞–≤–∞–ª—è—â–µ–π –±–∏–±–ª–∏–æ—Ç–µ–∫–æ–π –æ—Ç –≤–æ—Å—å–º–∏–±–∏—Ç–Ω–∏–∫–æ–≤, —Ç–æ–∂–µ –∑–∞—Ä–∞–±–æ—Ç–∞–ª–æ
—Å–∞–º –ø—Ä–æ–µ–∫—Ç–∏–∫:
–í–ª–æ–∂–µ–Ω–∏–µ:
FC_STM32F103C4LCD.zip [755.83 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 447
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Å–µ–Ω 12, 2017 12:55:22
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
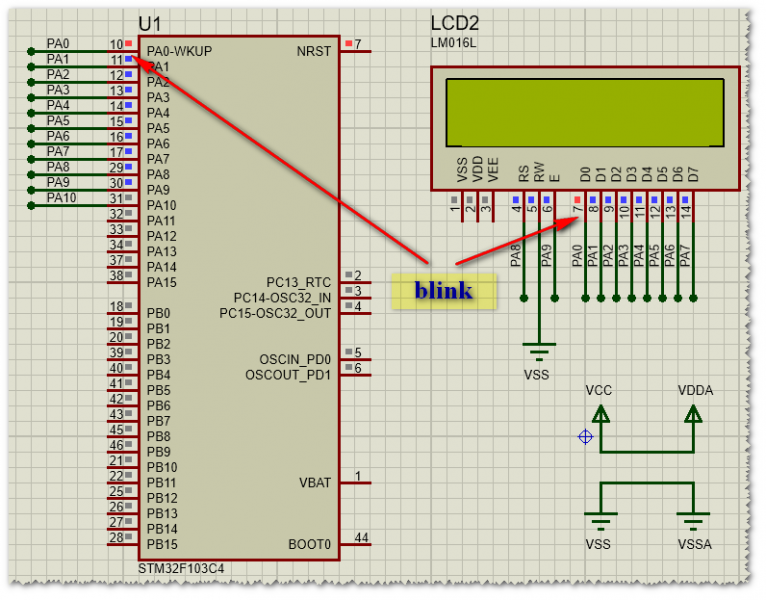
–∏ —Ç–∞–∫ –ü—Ä–æ—Ç–µ—É—Å –Ω–æ–≥–æ–¥—Ä—ã–≥ –Ω–æ—Ä–º–∞–ª—å–Ω–æ —Å–∏–º—É–ª–∏—Ä—É–µ—Ç, –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä –∂–∫–∏ –Ω–æ–≥–æ–¥—Ä—ã–≥–æ–º —Ä–∞–±–æ—Ç–∞–µ—Ç, –ø–æ–∫–∞ –≤—Å–µ –Ω–µ—Å–ª–æ–∂–Ω–æ, –∫–∞–∫ –∏ —Å –≤–æ—Å—å–º–∏–±–∏—Ç–Ω–∏–∫–∞–º–∏. –ü—Ä–æ–≤–µ—Ä–∏–º —Å–∏–º—É–ª—è—Ü–∏—é –ø—Ä–æ—Ç–µ—É—Å–æ–º —Ç–∞–π–º–µ—Ä–∞. –¢–∞–π–º–µ—Ä–æ–≤ –≤ –≤—ã–±—Ä–∞–Ω–Ω–æ–º –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ –¥–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ —Ç—Ä–∏ –¥–∞ –∏ –µ—â–µ –≤—Å–µ 16 –±–∏—Ç–Ω—ã–µ. –í –ø–µ—Ä–≤—É—é –æ—á–µ—Ä–µ–¥—å –¥–ª—è –ø—Ä—è–º–æ–≥–æ —Å—á–µ—Ç–∞ –Ω–∞–º –Ω—É–∂–µ–Ω —Å–µ–∫—É–Ω–¥–Ω—ã–π –∏–Ω—Ç–µ—Ä–≤–∞–ª - –≤–æ–∑—å–º–µ–º TIM3. –ï—Å—Ç—å —É —Ç–∞–π–º–µ—Ä–æ–≤ STM32 —É–¥–æ–±–Ω—ã–π —Ä–µ–∂–∏–º –æ–¥–Ω–æ–≥–æ –ø—Ä–æ—Ö–æ–¥–∞ (OPM) –∏ –µ—â–µ —Ç–∞–π–º–µ—Ä–∞ –º–æ–≥—É—Ç –∑–∞–ø—É—Å–∫–∞—Ç—å/—Ä–∞–∑—Ä–µ—à–∞—Ç—å —Å—á–µ—Ç –¥—Ä—É–≥–∏—Ö —Ç–∞–π–º–µ—Ä–æ–≤. –í—Å–µ —ç—Ç–æ –Ω–∞–º –æ—á–µ–Ω—å –¥–∞–∂–µ –ø—Ä–∏–≥–æ–¥–∏—Ç—Å—è –¥–ª—è —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–∞, –Ω–æ –Ω–∞–¥–æ —á—É—Ç—å –Ω–∞–ø—Ä—è—á—å—Å—è –∏ –ø–æ—á–∏—Ç–∞—Ç—å –º–∞—Ç—á–∞—Å—Ç—å. –ü—Ä–æ–±—É–µ–º –º–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º (–æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è —ç—Ç–æ –æ—á–µ–Ω—å –≤–∞–∂–Ω–æ–µ –∑–∞–Ω—è—Ç–∏–µ) —Å –ø–æ–º–æ—â—å—é TIM3 –≤ —Ä–µ–∂–∏–º–µ OPM, –∏–Ω—Ç–µ—Ä–≤–∞–ª —Å–µ–∫—É–Ω–¥–∞. –ó–∞–æ–¥–Ω–æ —Ä–∞–∑—Ä–µ—à–∏–º —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ –≤—Å–µ–≥–æ –Ω–∞–º –Ω—É–∂–Ω–æ–≥–æ –∏ –Ω–∞—Å—Ç—Ä–æ–∏–º –∑–∞–ø—É—Å–∫–∞—é—â—É—é –Ω–æ–≥—É –¥–ª—è –±—É–¥—É—â–µ–≥–æ –Ω–æ —É–∂–µ —Å—á–µ—Ç–Ω–æ–≥–æ —Ç–∞–π–º–µ—Ä–∞. –í—Å–µ –º–∏–≥–∞–µ—Ç, –∑–Ω–∞—á–∏—Ç —Ç–∞–π–º–µ—Ä–∞ –∫–∞–∫ —Ç–æ –ø—Ä–æ—Ç–µ—É—Å —Ç–æ–∂–µ —É–º–µ–µ—Ç.
–ø—Ä–æ–≥—Ä–∞–º–º–∫–∞:
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
#include "stm32f103x6.h"
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Reflector
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ú–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º. ARM –∏–ª–∏ –Ω–µ-ARM?
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Å–µ–Ω 12, 2017 13:32:19
–ü–æ—Å—Ç–∞–≤—â–∏–∫ –≤–∞–ª–µ—Ä—å—è–Ω–∫–∏ –¥–ª—è –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 256
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 19, 2016 09:32:03–°–æ–æ–±—â–µ–Ω–∏–π: 2089
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ï—Å—Ç—å —É —Ç–∞–π–º–µ—Ä–æ–≤ STM32 —É–¥–æ–±–Ω—ã–π —Ä–µ–∂–∏–º –æ–¥–Ω–æ–≥–æ –ø—Ä–æ—Ö–æ–¥–∞ (OPM) –∏ –µ—â–µ —Ç–∞–π–º–µ—Ä–∞ –º–æ–≥—É—Ç –∑–∞–ø—É—Å–∫–∞—Ç—å/—Ä–∞–∑—Ä–µ—à–∞—Ç—å —Å—á–µ—Ç –¥—Ä—É–≥–∏—Ö —Ç–∞–π–º–µ—Ä–æ–≤. –í—Å–µ —ç—Ç–æ –Ω–∞–º –æ—á–µ–Ω—å –¥–∞–∂–µ –ø—Ä–∏–≥–æ–¥–∏—Ç—Å—è –¥–ª—è —á–∞—Å—Ç–æ—Ç–æ–º–µ—Ä–∞, –Ω–æ –Ω–∞–¥–æ —á—É—Ç—å –Ω–∞–ø—Ä—è—á—å—Å—è –∏ –ø–æ—á–∏—Ç–∞—Ç—å –º–∞—Ç—á–∞—Å—Ç—å. –ü—Ä–æ–±—É–µ–º –º–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º (–æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è —ç—Ç–æ –æ—á–µ–Ω—å –≤–∞–∂–Ω–æ–µ –∑–∞–Ω—è—Ç–∏–µ) —Å –ø–æ–º–æ—â—å—é TIM3 –≤ —Ä–µ–∂–∏–º–µ OPM, –∏–Ω—Ç–µ—Ä–≤–∞–ª —Å–µ–∫—É–Ω–¥–∞.
–î–ª—è –ø—Ä—è–º–æ–≥–æ —Å—á–µ—Ç–∞ —Ç–µ–ø–µ—Ä—å –Ω—É–∂–Ω–æ —ç—Ç–æ—Ç TIM3 —Å–¥–µ–ª–∞—Ç—å –º–∞—Å—Ç–µ—Ä–æ–º(TIM_CR2_MMS = Enable) —Ä–∞–∑—Ä–µ—à–∞—é—â–∏–º —Å—á–µ—Ç –¥—Ä—É–≥–æ–º—É —Ç–∞–π–º–µ—Ä—É, –∞ TIM2 –±—É–¥–µ—Ç —Å–ª–µ–π–≤–æ–º(TIM_SMCR_SMS = GatedMode, TIM_SMCR_TS = ITR2) –∏ –µ—â–µ –Ω—É–∂–Ω–æ —Ä–∞–∑—Ä–µ—à–∏—Ç—å —Å—á–∏—Ç–∞—Ç—å –∏–º–ø—É–ª—å—Å—ã —Å–æ –≤—Ö–æ–¥–∞ ETR(TIM_SMCR_ECE = 1). –ï—Å–ª–∏ –Ω–∏—á–µ–≥–æ –∫—Ä–∏—Ç–∏—á–Ω–æ–≥–æ —Ñ–æ–Ω–æ–º –≤—ã–ø–æ–ª–Ω—è—Ç—å—Å—è –Ω–µ –±—É–¥–µ—Ç, —Ç–æ –æ–±—ä–µ–¥–∏–Ω—è—Ç—å –¥–≤–∞ —Ç–∞–π–º–µ—Ä–∞ –¥–ª—è –ø–æ–ª—É—á–µ–Ω–∏—è 32-—Ö –±–∏—Ç–Ω–æ–≥–æ –æ—Å–æ–±–æ–≥–æ —Å–º—ã—Å–ª–∞ –Ω–µ—Ç, –º–æ–∂–Ω–æ –æ–±–æ–π—Ç–∏—Å—å –∏ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è–º–∏, –∞ –Ω–∞ —Ç—Ä–µ—Ç—å–µ–º —Å–æ–±—Ä–∞—Ç—å –∏–∑–º–µ—Ä–∏—Ç–µ–ª—å –ø–µ—Ä–∏–æ–¥–∞.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 78 –∏–∑ 182
[ –°–æ–æ–±—â–µ–Ω–∏–π: 3623 ]
... , , , , , , ...
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: Google [Bot] , –ß—É–º–∞–∫ –∏ –≥–æ—Å—Ç–∏: 316
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è














")