–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 2 –∏–∑ 2
[ –°–æ–æ–±—â–µ–Ω–∏–π: 33 ]
,
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
AQ29
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞–π 06, 2017 20:56:57
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∏—é–ª 30, 2011 21:00:24–°–æ–æ–±—â–µ–Ω–∏–π: 110
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 3
–ê–ª–µ–∫—Å–µ–π bird , –Ω–∞ –ø—Ä–∏–º–µ—Ä–µ –ø–æ—Å—Ç–∞—Ä–∞—é—Å—å –ø–æ–∫–∞–∑–∞—Ç—å —á—Ç–æ –º–æ–∂–Ω–æ –ø–æ–ª—É—á–∏—Ç—å –æ—Ç RTOS.
–ú–æ–≥—É.
–ü—Ä–∏–≤–µ–¥—É –ø—Ä–æ—Å—Ç–µ–Ω—å–∫–∏–π –∫–æ–¥ –Ω–∞ –º–∞–∫—Ä–æ–∞—Å—Å–µ–º–±–ª–µ—Ä–µ –±–µ–∑ RTOS, —Ä–µ–∞–ª–∏–∑—É—é—â–∏–π –≤–∞—à –ø—Ä–∏–º–µ—Ä
(–º–Ω–µ–º–æ–Ω–∏–∫–∞ –Ω–µ—Å–∫–æ–ª—å–∫–æ –∏–∑–º–µ–Ω–µ–Ω–∞).
L:
Opros_Knopok
(Knopki = Kn_Pusk) ‚Üí Pusk ' –ü–µ—Ä–µ—Ö–æ–¥ –Ω–∞ —Ä–µ–∂–∏–º –ø—É—Å–∫, –µ—Å–ª–∏ –Ω–∞–∂–∞—Ç–∞ –∫–Ω–æ–ø–∫–∞ –ø—É—Å–∫
(flg_Int0 = 1) ‚Üí Int0 ' –ü–µ—Ä–µ—Ö–æ–¥ –Ω–∞ –æ–±—Ä–∞–±–æ—Ç–∫—É –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è, –µ—Å–ª–∏ –±—ã–ª —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω —Ñ–ª–∞–≥ Int0
Vyvod_Indikator
‚Üí L ' –ü–µ—Ä–µ—Ö–æ–¥ –Ω–∞ –º–µ—Ç–∫—É L
Opros_Knopok — подпрограмма опроса кнопок, результаты которого хранятся в переменной Knopki.
Vyvod_Indikator - –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º–∞ –≤—ã–≤–æ–¥–∞ –Ω–∞ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä.
–î–ª—è —É—Å–∫–æ—Ä–µ–Ω–∏—è –æ–±—Ä–∞–±–æ—Ç–∫–∏ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –≤ –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º–∞—Ö Opros_Knopok –∏ Vyvod_Indikator –º–æ–∂–Ω–æ –ø–æ—Å—Ç–∞–≤–∏—Ç—å –∫–æ–º–∞–Ω–¥—ã —É—Å–∫–æ—Ä–µ–Ω–Ω–æ–≥–æ –≤—ã—Ö–æ–¥–∞ –ø—Ä–∏ –ø–æ—è–≤–ª–µ–Ω–∏–∏ —Ñ–ª–∞–≥–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è.
–¢–∞–∫–æ–π —Ñ–ª–∞–≥ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç—Å—è –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ –ø—Ä–∏ –≤–æ–∑–Ω–∏–∫–Ω–æ–≤–µ–Ω–∏–∏ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è.
–¢—É—Ç —Ç–æ–∂–µ –ø–æ–ª—É—á–∞–µ—Ç—Å—è –ø—Ä–æ—Å—Ç–æ–π –∏ –ø–æ–Ω—è—Ç–Ω—ã–π –∫–æ–¥, –Ω–µ–±–æ–ª—å—à–æ–π –ø–æ –æ–±—ä—ë–º—É –∏, –Ω–∞–≤–µ—Ä–Ω–æ, –Ω–∞–º–Ω–æ–≥–æ –±—ã—Å—Ç—Ä–µ–µ –≤—ã–ø–æ–ª–Ω—è–µ–º—ã–π. –ù–∞–ø–∏—Å–∞–ª –∑–∞ –Ω–µ—Å–∫–æ–ª—å–∫–æ –º–∏–Ω—É—Ç.
–ò –≤ —á—ë–º –ø—Ä–µ–∏–º—É—â–µ—Å—Ç–≤–æ RTOS?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 07, 2017 05:58:32
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¶–∏—Ç–∞—Ç–∞:
–ò –≤ —á—ë–º –ø—Ä–µ–∏–º—É—â–µ—Å—Ç–≤–æ RTOS?
–ö–∞–∫ —Ä–∞–∑ –ø–æ –≤–∞—à–µ–º—É –ø—Ä–∏–º–µ—Ä—É –∏ –≤–∏–¥–Ω–æ - –ø—Ä–∏—Ö–æ–¥–∏—Ç—Å—è –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –æ–ø—Ä–∞—à–∏–≤–∞—Ç—å —Ñ–ª–∞–≥/—Ñ–ª–∞–≥–∏. –í RTOS –ø–æ—Ç–æ–∫–∏, —ç—Ç–æ –∫–∞–∫ –±—ã –æ—Ç–¥–µ–ª—å–Ω—ã–µ –ø—Ä–æ–≥—Ä–∞–º–º—ã, –∫–æ—Ç–æ—Ä—ã–µ –º–æ–≥—É—Ç –Ω–∏—á–µ–≥–æ –Ω–µ –∑–Ω–∞—Ç—å –æ –¥—Ä—É–≥ –¥—Ä—É–≥–µ - –∑–∞–¥–∞—á–∞ —è–¥—Ä–∞ –ø–æ –æ—á–µ—Ä–µ–¥–∏ –∑–∞–ø—É—Å–∫–∞—Ç—å –∏—Ö.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 07, 2017 08:20:34
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2116
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18403–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 2
oleg110592 –ø–∏—Å–∞–ª(–∞):
–ø—Ä–∏—Ö–æ–¥–∏—Ç—Å—è –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –æ–ø—Ä–∞—à–∏–≤–∞—Ç—å —Ñ–ª–∞–≥/—Ñ–ª–∞–≥–∏. –í RTOS –ø–æ—Ç–æ–∫–∏, —ç—Ç–æ –∫–∞–∫ –±—ã –æ—Ç–¥–µ–ª—å–Ω—ã–µ –ø—Ä–æ–≥—Ä–∞–º–º—ã, –∫–æ—Ç–æ—Ä—ã–µ –º–æ–≥—É—Ç –Ω–∏—á–µ–≥–æ –Ω–µ –∑–Ω–∞—Ç—å –æ –¥—Ä—É–≥ –¥—Ä—É–≥–µ
–≠—Ç–æ —Ç–æ–ª—å–∫–æ –µ—Å–ª–∏ "–ø–æ—Ç–æ–∫–∏" –Ω–µ –≤–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤—É—é—Ç. –ù–∞–ø—Ä–∏–º–µ—Ä, –æ–¥–∏–Ω –ø–æ—Ç–æ–∫ –º–∏–≥–∞–µ—Ç —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞–º–∏, –¥–µ–ª–∞—è –±–µ–≥—É—â–∏–µ –æ–≥–Ω–∏, –∞ –¥—Ä—É–≥–æ–π –ø–∏—â–∏—Ç –¥–∏–Ω–∞–º–∏–∫–æ–º, –Ω–∞–∏–≥—Ä—ã–≤–∞—è "–≤ –ª–µ—Å—É —Ä–æ–¥–∏–ª–∞—Å—å —ë–ª–æ—á–∫–∞". –ö–∞–∫ —Ç–æ–ª—å–∫–æ –≤—ã –≤–æ–∑–Ω–∞–º–µ—Ä–∏—Ç–µ—Å—å –∏–∑ –æ–¥–Ω–æ–≥–æ –ø–æ—Ç–æ–∫–∞ –≤ –¥—Ä—É–≥–æ–π –ø–µ—Ä–µ–¥–∞—Ç—å –¥–∞–Ω–Ω—ã–µ - –Ω–∞—á–Ω—É—Ç—Å—è —Ñ–ª–∞–≥–∏ –∏ —Ç.–ø. –í –ø—Ä–æ—Å—Ç—ã—Ö —Å–ª—É—á–∞—è—Ö —ç—Ç–æ –±—É–¥–µ—Ç —Å–¥–µ–ª–∞–Ω–æ –Ω–µ–∑–∞–º–µ—Ç–Ω–æ –¥–ª—è –≤–µ—Ä—Ö–Ω–µ–≥–æ —É—Ä–æ–≤–Ω—è, —Ç–∏–ø–∞ send_message-—Ñ—É–Ω–∫—Ü–∏–µ–π, –≤ –¥—Ä—É–≥–∏—Ö –±—É–¥–µ—Ç –∫—É—á–∞ —Å–µ–º–∞—Ñ–æ—Ä–æ–≤, –º—å—é—Ç–µ–∫—Å–æ–≤ –∏ —Ç.–ø. —Å–ª–æ–∂–Ω–æ–ø–µ—Ä–µ–≤–∞—Ä–∏–≤–∞–µ–º–æ–π —Ö—Ä–µ–Ω–∏.
–¢–æ–ª—å–∫–æ –¥–ª—è –≤—ã—à–µ–æ–ø–∏—Å–∞–Ω–Ω–æ–≥–æ —Å–ª—É—á–∞—è –º—É–∑—ã–∫–∞–ª—å–Ω—ã—Ö –±–µ–≥—É—â–∏—Ö –æ–≥–Ω–µ–π –±–µ–∑ –û–° –ø–æ–ª—É—á–∏—Ç—Å—è –Ω–∏—á—É—Ç—å –Ω–µ —Å–ª–æ–∂–Ω–µ–µ.
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 07, 2017 08:58:10
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ö–∞–∫ —Ç–æ–ª—å–∫–æ –≤—ã –≤–æ–∑–Ω–∞–º–µ—Ä–∏—Ç–µ—Å—å –∏–∑ –æ–¥–Ω–æ–≥–æ –ø–æ—Ç–æ–∫–∞ –≤ –¥—Ä—É–≥–æ–π –ø–µ—Ä–µ–¥–∞—Ç—å –¥–∞–Ω–Ω—ã–µ - –Ω–∞—á–Ω—É—Ç—Å—è —Ñ–ª–∞–≥–∏ –∏ —Ç.–ø. –í –ø—Ä–æ—Å—Ç—ã—Ö —Å–ª—É—á–∞—è—Ö —ç—Ç–æ –±—É–¥–µ—Ç —Å–¥–µ–ª–∞–Ω–æ –Ω–µ–∑–∞–º–µ—Ç–Ω–æ –¥–ª—è –≤–µ—Ä—Ö–Ω–µ–≥–æ —É—Ä–æ–≤–Ω—è, —Ç–∏–ø–∞ send_message-—Ñ—É–Ω–∫—Ü–∏–µ–π, –≤ –¥—Ä—É–≥–∏—Ö –±—É–¥–µ—Ç –∫—É—á–∞ —Å–µ–º–∞—Ñ–æ—Ä–æ–≤, –º—å—é—Ç–µ–∫—Å–æ–≤ –∏ —Ç.–ø. —Å–ª–æ–∂–Ω–æ–ø–µ—Ä–µ–≤–∞—Ä–∏–≤–∞–µ–º–æ–π —Ö—Ä–µ–Ω–∏.
–∏–º—Ö–æ –Ω–µ –æ—á–µ–Ω—å —Ç–æ –∏ —Å–ª–æ–∂–Ω–æ–ø–µ—Ä–µ–≤–∞—Ä–∏–≤–∞–µ–º–æ:
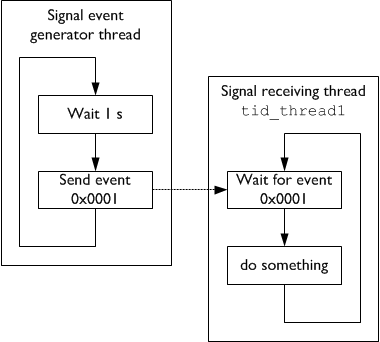
The following steps are required to use signals:
In the thread (for example thread ID tid_thread1) that is supposed to wait for a signal, call the wait function:
–ö–æ–¥:
osSignalWait (0x0001, osWaitForever); // wait forever for the signal 0x0001
In another thread (or threads) that are supposed to wake the waiting thread up call:
–ö–æ–¥:
osSignalSet (tid_thread1, 0x0001); // set the signal 0x0001 for thread tid_thread1
—Ä–µ–∞–ª—å–Ω—ã–π –ø—Ä–∏–º–µ—Ä—á–∏–∫ –±–ª–∏–Ω–∫–∞–Ω—å—è –≥—Ä—É–ø–ø–æ–π —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ –ø–æ –∫–Ω–æ–ø–∫–µ CMSIS-RTOS –∏–∑ –ø–∞–∫–æ–≤ –ö–µ–π–ª–∞:
–°–ø–æ–π–ª–µ—Ä ..–ö–æ–¥:
/*----------
–ö–æ–¥:
osThreadId tid_blinkLED;
–≤–ø–æ–ª–Ω–µ –ø–µ—Ä–µ–≤–∞—Ä–∏–≤–∞–µ–º–æ (–∏–º—Ö–æ), –¥–∞ –º–æ–∂–Ω–æ –∏ –±–µ–∑ RTOS –≤–ø–æ–ª–Ω–µ –∫—Ä–∞—Å–∏–≤–æ –æ—Ñ–æ—Ä–º–∏—Ç—å, –Ω–æ –≥–æ–≤–æ—Ä—è—Ç —Å RTOS –Ω–µ–∫–æ—Ç–æ—Ä—ã–µ –∑–∞–¥–∞—á–∏ —Ä–µ—à–∞—Ç—å –ª—É—á—à–µ–µ, —á–µ–º –±–µ–∑ –æ–Ω–æ–π
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
–í—ã–±–∏—Ä–∞–µ–º –∏–Ω–¥—É—Å—Ç—Ä–∏–∞–ª—å–Ω—ã–µ –∏ –º–µ–¥–∏—Ü–∏–Ω—Å–∫–∏–µ –∏—Å—Ç–æ—á–Ω–∏–∫–∏ –ø–∏—Ç–∞–Ω–∏—è MEAN WELL –≤ –æ—Ç–∫—Ä—ã—Ç–æ–º –∏—Å–ø–æ–ª–Ω–µ–Ω–∏–∏
–ò—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –º–æ–¥—É–ª—å–Ω—ã—Ö –∏—Å—Ç–æ—á–Ω–∏–∫–æ–≤ –ø–∏—Ç–∞–Ω–∏—è –æ—Ç–∫—Ä—ã—Ç–æ–≥–æ —Ç–∏–ø–∞ —à–∏—Ä–æ–∫–æ —Ä–∞—Å–ø—Ä–æ—Å—Ç—Ä–∞–Ω–µ–Ω–æ –≤ —Å–æ–≤—Ä–µ–º–µ–Ω–Ω—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞—Ö. –ü—Ä–∏—Å—É—â–∏–µ –∏–º –∫–æ–º–ø–∞–∫—Ç–Ω–æ—Å—Ç—å, –≥–∏–±–∫–æ—Å—Ç—å –≤ –∏–Ω—Ç–µ–≥—Ä–∞—Ü–∏–∏ –∏ –≤—ã—Å–æ–∫–∞—è —ç—Ñ—Ñ–µ–∫—Ç–∏–≤–Ω–æ—Å—Ç—å –¥–µ–ª–∞—é—Ç –∏—Ö –æ—Ç–ª–∏—á–Ω—ã–º —Ä–µ—à–µ–Ω–∏–µ–º –¥–ª—è —Å–∏—Å—Ç–µ–º –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω–æ–π –∞–≤—Ç–æ–º–∞—Ç–∏–∑–∞—Ü–∏–∏, —Ç–µ–ª–µ–∫–æ–º–º—É–Ω–∏–∫–∞—Ü–∏–æ–Ω–Ω–æ–≥–æ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏—è, –º–µ–¥–∏—Ü–∏–Ω—Å–∫–æ–π —Ç–µ—Ö–Ω–∏–∫–∏, —É—Å—Ç—Ä–æ–π—Å—Ç–≤ ¬´—É–º–Ω–æ–≥–æ –¥–æ–º–∞¬ª –∏ –ø—Ä–æ—á–∏—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π. –Ý–∞—Å—Å–º–æ—Ç—Ä–∏–º –ø–æ–¥—Ä–æ–±–Ω–µ–µ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ –∏ –æ—Å–æ–±–µ–Ω–Ω–æ—Å—Ç–∏ —Ç—Ä–µ—Ö —Å–∞–º—ã—Ö –ø–æ–ø—É–ª—è—Ä–Ω—ã—Ö –≤–∞—Ä–∏–∞–Ω—Ç–æ–≤ AC/DC-–ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª–µ–π MW –æ—Ç–∫—Ä—ã—Ç–æ–≥–æ —Ç–∏–ø–∞, –ø–æ–¥—Ö–æ–¥—è—â–∏—Ö –¥–ª—è –ø—Ä–∏–º–µ–Ω–µ–Ω–∏—è –≤ –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞—Ö - —Å–µ—Ä–∏–π EPS, EPP –∏ RPS –ø—Ä–µ–¥—Å—Ç–∞–≤–ª–µ–Ω–Ω—ã—Ö –Ω–∞ Meanwell.market.
–ü–æ–¥—Ä–æ–±–Ω–µ–µ>>
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 07, 2017 10:19:53
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2116
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18403–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 3
–ú–µ–¥–∞–ª–∏: 2
oleg110592 –ø–∏—Å–∞–ª(–∞):
—Å RTOS –Ω–µ–∫–æ—Ç–æ—Ä—ã–µ –∑–∞–¥–∞—á–∏ —Ä–µ—à–∞—Ç—å –ª—É—á—à–µ–µ, —á–µ–º –±–µ–∑ –æ–Ω–æ–π
–ª–∏—á–Ω–æ —è —Å —ç—Ç–∏–º –∏ –Ω–µ —Å–ø–æ—Ä—é. –Ω–æ —Ç–æ—á–Ω–æ —Ç–∞–∫ –∂–µ "–Ω–µ–∫–æ—Ç–æ—Ä—ã–µ –∑–∞–¥–∞—á–∏" –Ω–∞ AVR –ª—É—á—à–µ –≤–æ–æ–±—â–µ –Ω–µ —Ä–µ—à–∞—Ç—å, –æ—Å–æ–±–µ–Ω–Ω–æ –µ—Å–ª–∏ –∑–∞–¥–∞—á–∏ —Ç—è–Ω—É—Ç –∑–∞ —Å–æ–±–æ–π –û–°... –∞ –ø—Ä–∏–¥—É–º–∞—Ç—å –¥–ª—è AVR –∑–∞–¥–∞—á–∏, —Ä–µ—à–µ–Ω–∏–µ –∫–æ—Ç–æ—Ä—ã—Ö —Å –û–° –∫–∞—Ä–¥–∏–Ω–∞–ª—å–Ω–æ —É–¥–æ–±–Ω–µ–µ, —á–µ–º –±–µ–∑ –Ω–µ–µ, —è –Ω–µ –º–æ–≥—É.
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞–π 07, 2017 18:37:24
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–Ω–µ —Ç–∞–∫ —Å—Ç—Ä–∞—à–µ–Ω... –ü–æ–ø—Ä–æ–±–æ–≤–∞–ª AVR –ø–æ—Ä—Ç —Ä–∞—Å–ø—Ä–æ—Å—Ç—Ä–∞–Ω–µ–Ω–Ω–æ–π FreeRTOS, –∫–æ—Ç–æ—Ä–∞—è –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ—Ç –±–æ–ª—å—à—É—é —Ö—É—á—É –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–≤ (–∏ –¥–∞–∂–µ Quark –∏ x86), –Ω–∞ mega8. –î–≤–µ –∑–∞–¥–∞—á–∏ –±–ª–∏–Ω–∫–∞–Ω—å—è —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞–º–∏. –í –ø—Ä–æ—Ç–µ—É—Å–µ –ø—Ä–æ–≤–µ—Ä–∏–ª - –±–ª–∏–Ω–∫–∞—é—Ç.
–ó–∞–Ω—è–ª–æ –ø–æ–ª–æ–≤–∏–Ω—É —Ä–µ—Å—É—Ä—Å–æ–≤, ram –ø–æ–±–æ–ª–µ–µ –ø–æ–ª–æ–≤–∏–Ω—ã:
–ö–æ–¥:
Device: atmega8
–∂–∏—Ç—å —Å RTOS –º–æ–∂–Ω–æ –∏ –Ω–∞ AVR, —Ç–µ–º –±–æ–ª–µ–µ –≤ –Ω–∞–ª–∏—á–∏–∏ AVR –∏–º–µ—é—Ç—Å—è —ç–∫–∑–µ–º–ø–ª—è—Ä—ã —Å –±–æ–ª–µ–µ —Ä–µ—Å—É—Ä—Å–∞–º–∏, –∞ –µ—â–µ –µ—Å—Ç—å xmeg–∏ —Ç–æ–∂ AVR—ã, –∞ –Ω–∞ AVR32 –ª–∏–Ω—É–∫—Å—ã –∑–∞–ø—É—Å–∫–∞—é—Ç. –û—Å–Ω–æ–≤–Ω–æ–π main —Ñ–∞–π–ª –≤—ã–≥–ª—è–¥–∏—Ç –Ω–µ —Å—Ç—Ä–∞—à–Ω–æ:
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
#include "FreeRTOS.h"
–ù–µ –∑–Ω–∞—é –Ω–∞—Å—á–µ—Ç –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–æ–π —Ü–µ–Ω–Ω–æ—Å—Ç–∏ –ø–æ—Ä—Ç–∞ RTOS –ø–æ–¥ 8 –±–∏—Ç AVR, –Ω–æ –ø–æ—É—á–∏—Ç—Å—è –º–æ–∂–Ω–æ, —Å —Ü–µ–ª—å—é –ø–æ–ª—É—á–∏—Ç—å –ø–æ—Ç–æ–º –ø—Ä–µ—Å—Ç–∏–∂–Ω—É—é —Ä–∞–±–æ—Ç—É
. –í—Ä–æ–¥–µ –¥–ª—è –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω—ã—Ö –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–π –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–≤, –≥–¥–µ –∂–∏–∑–Ω—å —á–µ–ª–æ–≤–µ–∫–∞ –º–æ–∂–µ—Ç –±—ã—Ç—å –ø–æ–¥–≤–µ—Ä–≥–Ω—É—Ç–∞ –æ–ø–∞—Å–Ω–æ—Å—Ç–∏ –ø—Ä–∏–º–µ–Ω—è—é—Ç —Å–µ—Ä—Ç–∏—Ñ–∏—Ü–∏—Ä–æ–≤–∞–Ω–Ω—ã–µ –±–µ–∑–æ–ø–∞—Å–Ω—ã–µ RTOS —Ç–∏–ø–∞:
https://www.highintegritysystems.com/em ... lications/
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
AQ29
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞–π 08, 2017 21:21:45
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∏—é–ª 30, 2011 21:00:24–°–æ–æ–±—â–µ–Ω–∏–π: 110
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¶–∏—Ç–∞—Ç–∞:
–ò –≤ —á—ë–º –ø—Ä–µ–∏–º—É—â–µ—Å—Ç–≤–æ RTOS?
–ö–∞–∫ —Ä–∞–∑ –ø–æ –≤–∞—à–µ–º—É –ø—Ä–∏–º–µ—Ä—É –∏ –≤–∏–¥–Ω–æ - –ø—Ä–∏—Ö–æ–¥–∏—Ç—Å—è –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –æ–ø—Ä–∞—à–∏–≤–∞—Ç—å —Ñ–ª–∞–≥/—Ñ–ª–∞–≥–∏. –í RTOS –ø–æ—Ç–æ–∫–∏, —ç—Ç–æ –∫–∞–∫ –±—ã –æ—Ç–¥–µ–ª—å–Ω—ã–µ –ø—Ä–æ–≥—Ä–∞–º–º—ã, –∫–æ—Ç–æ—Ä—ã–µ –º–æ–≥—É—Ç –Ω–∏—á–µ–≥–æ –Ω–µ –∑–Ω–∞—Ç—å –æ –¥—Ä—É–≥ –¥—Ä—É–≥–µ - –∑–∞–¥–∞—á–∞ —è–¥—Ä–∞ –ø–æ –æ—á–µ—Ä–µ–¥–∏ –∑–∞–ø—É—Å–∫–∞—Ç—å –∏—Ö.
–ß–µ–º —Ñ–ª–∞–≥–∏ –Ω–µ –ø–æ–Ω—Ä–∞–≤–∏–ª–∏—Å—å?
–û–ø—Ä–æ—Å–∏—Ç—å —Ñ–ª–∞–≥–∏ –Ω–µ—Å–ª–æ–∂–Ω–æ, –¥–∞ –∏ —Ñ–ª–∞–≥–∏ –ø–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—é —Å—Ç–∞—Ä–∞—é—Å—å –º–∏–Ω–∏–º–∏–∑–∏—Ä–æ–≤–∞—Ç—å. –ê –ø—Ä–æ–≥—Ä–∞–º–º–∞ –ø–æ–ª—É—á–∞–µ—Ç—Å—è –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –Ω–µ—Å–ª–æ–∂–Ω–æ–π, —Å–∫–æ—Ä–æ—Å—Ç–Ω–æ–π, –ª–µ–≥–∫–æ —á–∏—Ç–∞–µ–º–æ–π.
Насчёт того, что «В RTOS потоки, это как бы отдельные программы, которые могут ничего не знать о друг друге».
–î–∞–∂–µ –µ—Å–ª–∏ –ø–æ—Ç–æ–∫–∏ –ª–æ–≥–∏—á–µ—Å–∫–∏ –Ω–µ —Å–≤—è–∑–∞–Ω—ã –¥—Ä—É–≥ —Å –¥—Ä—É–≥–æ–º, –¥—É–º–∞—é, –µ—Å—Ç—å –µ—â—ë –≤–∞–∂–Ω—ã–π
связывающий фактор — временной, когда МК должен быстро отработать некоторые процессы.
Наверно, «скоростные» задачи без RTOS лучше решаются.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
microbober
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –º–∞–π 09, 2017 01:56:48
–Ý–æ–¥–∏–ª—Å—è
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Å–µ–Ω 16, 2008 01:12:59–°–æ–æ–±—â–µ–Ω–∏–π: 12
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
Наверно, «скоростные» задачи без RTOS лучше решаются.
–í –±–æ–ª—å—à–∏–Ω—Å—Ç–≤–µ RTOS —Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω–∞ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –∑–∞–¥–∞–≤–∞—Ç—å –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç—ã –ø–æ—Ç–æ–∫–æ–≤.
–î–ª—è –ø—Ä–∏–º–µ—Ä–∞: –ø–µ—Ä–≤—ã–π –ø–æ—Ç–æ–∫ - —Ä–∞–±–æ—Ç–∞ —Å SD-–∫–∞—Ä—Ç–æ–π, –Ω–∏–∑–∫–∏–π –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç; –≤—Ç–æ—Ä–æ–π –ø–æ—Ç–æ–∫ - –æ–±—Ä–∞–±–æ—Ç–∫–∞ —Å–æ–æ–±—â–µ–Ω–∏–π –æ—Ç UART, –≤—ã—Å–æ–∫–∏–π –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç. –ü—Ä–∏ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö –¥–æ–ø—É—â–µ–Ω–∏—è—Ö (–Ω–∞–ø—Ä–∏–º–µ—Ä, –æ–±—Ä–∞–±–æ—Ç–∫—É –Ω–µ–ª—å–∑—è –≤—ã–Ω–µ—Å—Ç–∏ –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ), –≤ —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ –Ω–∞ —Ñ–ª–∞–≥–∞—Ö —Ä–∞–±–æ—Ç–∞ —Å SD –±—É–¥–µ—Ç –ø—Ä–∏–≤–æ–¥–∏—Ç—å –∫ –ø–æ—Ç–µ—Ä–µ —Å–æ–æ–±—â–µ–Ω–∏–π, –ø–æ–ª—É—á–∞–µ–º—ã—Ö –ø–æ UART.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –º–∞–π 09, 2017 12:56:57
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ß–µ–º —Ñ–ª–∞–≥–∏ –Ω–µ –ø–æ–Ω—Ä–∞–≤–∏–ª–∏—Å—å?
–î—ã–∫ —Ñ–ª–∞–≥–∞–º–∏ —Å–∞–º —Ç–∞–∫–∏ –∏ –ø–æ–ª—å–∑—É—é—Å—å. –Ý–µ—á—å —Ç–æ –æ —Ç–æ–º, —á—Ç–æ —Å RTOS –ø—Ä–æ–≥—Ä–∞–º–º–∞ –ø–æ–ª—É—á–∞–µ—Ç—Å—è –≤–æ–æ–±—â–µ –Ω–µ—Å–ª–æ–∂–Ω–æ–π –∏ –µ—â–µ –±–æ–ª–µ–µ —á–∏—Ç–∞–µ–º–æ–π, –ø–µ—Ä–µ–Ω–æ—Å–∏–º–æ–π –∏ –Ω–∞–¥–µ–∂–Ω–æ–π. –û—Ç–¥–µ–ª—å–Ω—ã–µ –∑–∞–¥–∞—á–∏ –º–æ–≥—É—Ç –ø–∏—Å–∞—Ç—å —Ä–∞–∑–Ω—ã–µ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Å—Ç—ã.
Наверно, «скоростные» задачи без RTOS лучше решаются.
–ù—É —Å–∞–º–∞—è –ø–æ–ø—É–ª—è—Ä–Ω–∞—è –≤ –Ý–æ—Å—Å–∏–∏ RTOS ‚Äî QNX 4.0 (–ø—Ä–∞–≤–¥–∞ –Ω–∞ AVR –ø–æ—Ä—Ç–∞ –Ω–µ—Ç) 8–ö –º–∏–∫—Ä–æ—è–¥—Ä–æ (–¥–∞-–¥–∞, –≤–æ—Å–µ–º—å –∫–∏–ª–æ–±–∞–π—Ç!) –≤—Ä–µ–º—è –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –∫–æ–Ω—Ç–µ–∫—Å—Ç–∞ ‚Äî 2,5 –Ω–∞–Ω–æ—Å–µ–∫—É–Ω–¥—ã, –∏ —è–¥—Ä–æ –ø–æ–ª–Ω–æ—Å—Ç—å—é –Ω–∞–ø–∏—Å–∞–Ω–æ –Ω–∞ –∞—Å—Å–µ–º–±–ª–µ—Ä–µ, —á—Ç–æ –æ–±–µ—Å–ø–µ—á–∏–≤–∞–µ—Ç –≤—ã—Å–æ—á–∞–π—à—É—é —Å–∫–æ—Ä–æ—Å—Ç—å. –ö—Ä–æ–º–µ —Ç–æ–≥–æ, –≤ —Ç–∞–∫–æ–π –Ω–µ–±–æ–ª—å—à–æ–π –ø—Ä–æ–≥—Ä–∞–º–º–µ –ª–µ–≥—á–µ –Ω–∞—Ö–æ–¥–∏—Ç—å –æ—à–∏–±–∫–∏, —á—Ç–æ –¥–µ–ª–∞–µ—Ç –µ–≥–æ (—è–¥—Ä–æ) —á—Ä–µ–∑–≤—ã—á–∞–π–Ω–æ –Ω–∞–¥–µ–∂–Ω—ã–º. QNX
—Å–º–µ–ª–æ –º–æ–∂–Ω–æ –Ω–∞–∑–≤–∞—Ç—å –æ–¥–Ω–æ–π –∏–∑ —Å–∞–º—ã—Ö –ø—Ä–æ—Ä–∞–±–æ—Ç–∞–Ω–Ω—ã—Ö –û–°. –ù–µ —É–¥–∏–≤–∏—Ç–µ–ª—å–Ω–æ, —á—Ç–æ –µ–π –¥–æ–≤–µ—Ä—è—é—Ç –∫–æ–Ω—Ç—Ä–æ–ª—å –Ω–∞–¥ —è–¥–µ—Ä–Ω—ã–º–∏ —Ä–µ–∞–∫—Ç–æ—Ä–∞–º–∏
–∏ –º–µ–¥–∏—Ü–∏–Ω—Å–∫–∏–º –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏–µ–º. –ò —Ç–æ, –∏ –¥—Ä—É–≥–æ–µ –Ω–∞–ø—Ä—è–º—É—é —Å–≤—è–∑–∞–Ω–æ —Å –∂–∏–∑–Ω—å—é –∏ –∑–¥–æ—Ä–æ–≤—å–µ–º –ª—é–¥–µ–π.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
Vladimir1962
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞–π 22, 2017 11:54:48
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞–π 21, 2017 16:43:56–°–æ–æ–±—â–µ–Ω–∏–π: 22
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü–æ–ø—Ä–æ–±—É—é –¥–æ–ø–æ–ª–Ω–∏—Ç—å —ç—Ç–æ—Ç —Ç–æ–ø–∏–∫...–ø–æ–∑–∞–Ω—É–¥–Ω–∏—á–∞—é, –º–æ–∂–Ω–æ?
–û–°, –∫–∞–∫ –∏ –µ—Å—Ç—å –≤ –í–∏–∫–∏: "–Ω–∞–±–æ—Ä –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º –¥–ª—è .. –∏ –≤–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤–∏—è —Å –ø–æ–ª–∑–∞—Ç–µ–ª—è–º–∏". –¢–æ –µ—Å—Ç—å –û–° —Ä–µ—à–∞–µ—Ç –∑–∞–¥–∞—á–∏ –∑–∞–ø—É—Å–∫–∞ –ø—Ä–æ–≥—Ä–∞–º–º –Ω–∞ –¥–∞–Ω–Ω–æ–º –∂–µ–ª–µ–∑–µ, —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Ä–µ—Å—É—Ä—Å–∞–º–∏ —ç—Ç–æ–≥–æ –∂–µ–ª–µ–∑–∞ –ò –≤–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤–∏—è —Å —á–µ–ª–æ–≤–µ–∫–æ–º.
–ü–µ—Ä–µ–Ω–æ—Å—è —ç—Ç–æ –Ω–∞ AVR –∫–∞–∫ —É–ø—Ä–∞–≤–ª—è—é—â–∏–π –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä, –∏–º–µ–µ–º: —á—Ç–æ–±—ã –¥–∞–Ω–Ω–∞—è –±–∏–±–ª–∏–æ—Ç–µ–∫–∞ –º–æ–≥–ª–∞ –Ω–æ—Å–∏—Ç—å –≥–æ—Ä–¥–æ–µ –Ω–∞–∑–≤–∞–Ω–∏–µ "–û–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∞—è –°–∏—Å—Ç–µ–º–∞", —Ç—Ä–µ–±—É–µ—Ç—Å—è –≤—ã–ø–æ–ª–Ω–µ–Ω–∏–µ —É—Å–ª–æ–≤–∏–π (—Å –∫–æ–Ω—Ü–∞):
–∞) —Ç–∏–ø–æ–≤–æ–π –∫–æ–º–ø–ª–µ–∫—Ç —Å—Ä–µ–¥—Å—Ç–≤ –≤–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤–∏—è —Å –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–º. –í —Ü–µ–ª–æ–º –µ—Å–ª–∏ –∏ –Ω–µ—Ç, —Ç–æ –Ω–µ—Ç—Ä—É–¥–Ω–æ –≤–≤–µ—Å—Ç–∏ –Ω–µ–∫–∏–π "—Å—Ç–∞–Ω–¥–∞—Ä—Ç" –Ω–∞ –±–∞–∑–µ libc: printf() –∏ —Ç.–¥.;
–±) —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Ä–µ—Å—É—Ä—Å–∞–º–∏ .. –≤–æ—Ç —Ç—É—Ç —É–∂–µ —Ö–æ—Ä–æ—à–æ –≤—ã—Ö–æ–¥–∏—Ç. –ò–±–æ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä .. —É–ø—Ä–∞–≤–ª—è—é—â–∏–π –∏ –µ–≥–æ "—Ä–µ—Å—É—Ä—Å—ã" –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–∏ –∏–Ω–¥–∏–≤–∏–¥—É–∞–ª—å–Ω—ã –≤ –¥–∞–Ω–Ω–æ–º –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ–º –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–∏. –Ý–∞–∑–≤–µ —á—Ç–æ "–ø—Ä–æ—Ü–µ—Å—Å–æ—Ä–Ω–æ–µ –≤—Ä–µ–º—è" –∏ "—Ä–∞—Å–ø—Ä–µ–¥–µ–ª–µ–Ω–∏–µ –ø–∞–º—è—Ç–∏"...
–≤) –∑–∞–ø—É—Å–∫ –ø—Ä–æ–≥—Ä–∞–º–º .. –∏ —Ç—É—Ç —Å–æ–≤—Å–µ–º "–∑–∞—Å–∞–¥–∞": —É–ø—Ä–∞–≤–ª—è—é—â–∏–π –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ø—Ä–µ–¥–Ω–∞–∑–Ω–∞—á–µ–Ω –¥–ª—è —Ä–µ—à–µ–Ω–∏—è –Ω–µ–∫–æ–π –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ–π –∑–∞–¥–∞—á–∏ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –≤ —Å—Ç—Ä–æ–≥–æ —ç—Ç–æ–º, –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ–º –æ–∫—Ä—É–∂–µ–Ω–∏–∏ .. —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–µ—Ä–º–æ—Å—Ç–∞—Ç–æ–º, –ø—Ä–æ–±–Ω–∏–∫-–æ—Å—Ü–∏–ª–æ–≥—Ä–∞—Ñ, –ü–ò–î-—Ä–µ–≥—É–ª—è—Ç–æ—Ä –≥–æ–Ω–æ—á–Ω–æ–π —Ç–µ–ª–µ–∂–∫–∏, –∫–æ–Ω—Ç—Ä–æ–ª—å —Ä–∞–±–æ—Ç—ã –≤–∏–¥–µ–æ–∫–∞–º–µ—Ä—ã –∏ —Å–∏—Å—Ç–µ–º—ã –µ—ë –≤–∫–ª—é—á–µ–Ω–∏—è/–≤—ã–∫–ª—é—á–µ–Ω–∏—è, –ø–æ–≤–æ—Ä–æ—Ç–∞ .. –ö–ê–ö —ç—Ç–æ –≤—Å–µ —Å–æ–≤–º–µ—Å—Ç–∏—Ç—å –≤ —Ä–∞–º–∫–∞—Ö –æ–¥–Ω–æ–π "–û–°" —Å –µ–¥–∏–Ω—ã–º –º–µ—Ö–∞–Ω–∏–∑–º–æ–º —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è?
–ù—É –∏ –≥–¥–µ —Ç—É—Ç "–û–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∞—è –°–∏—Å—Ç–µ–º–∞", –∫–æ–≥–¥–∞ –∫–∞–∂–¥–æ–µ –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–µ –º–æ–∂–Ω–æ —Å—á–∏—Ç–∞—Ç—å —É–Ω–∏–∫–∞–ª—å–Ω—ã–º?
–ú–æ–∂–Ω–æ –≤–µ—Å—Ç–∏ —Ä–µ—á—å –∑–∞ "–∫—É—Å–æ–∫ RTOS", –∞ –∏–º–µ–Ω–Ω–æ –∑–∞ —Å–∏—Å—Ç–µ–º—É –ø—Ä–æ–∑—Ä–∞—á–Ω–æ–≥–æ —Ä–∞—Å–ø–∞—Ä–∞–ª–ª–µ–ª–∏–≤–∞–Ω–∏—è –∑–∞–¥–∞—á - "–¥–∏—Å–ø–µ—Ç—á–µ—Ä –∑–∞–¥–∞—á". –û–Ω –∏–Ω—Ç–µ—Ä–µ—Å–µ–Ω –∏ –ø–æ–ª–µ–∑–µ–Ω –±–æ–ª—å—à–µ –≤ —Ä–∞–º–∫–∞—Ö "–∞–≤—Ç–æ–º–∞—Ç–Ω–æ–≥–æ" –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è. –ö–æ–≥–¥–∞ –∫–∞–∂–¥—ã–π —Ä–µ—Å—É—Ä—Å —É–ø—Ä–∞–≤–ª—è–µ—Ç—Å—è —Å–≤–æ–∏–º –∫–æ–Ω–µ—á–Ω—ã–º –∞–≤—Ç–æ–º–∞—Ç–æ–º –∏ —Ä–∞–∑—Ä–∞–±–æ—Ç—á–∏–∫—É –Ω–µ–≤–∞–∂–Ω–æ –≤ –∫–∞–∫–æ–º –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ –ø–æ—Ä—è–¥–∫–µ –∏—Å–ø–æ–ª–Ω—è—é—Ç—Å—è —ç—Ç–∏ –∞–≤—Ç–æ–º–∞—Ç—ã .. –ø–æ—Ä—è–¥–æ–∫ –∏—Ö –¥–µ–π—Å—Ç–≤–∏–π –≤—Å–µ —Ä–∞–≤–Ω–æ –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç—Å—è —Å–º–µ–Ω–æ–π –∏—Ö —Å–æ—Å—Ç–æ—è–Ω–∏–π. –ù–æ, –∫–∞–∫ –Ω–∏ —Å—Ç—Ä–∞–Ω–Ω–æ, "—é–Ω–∏–∫—Å-–ø–æ–¥–æ–±–Ω—ã–π" —Å—Ç–∏–ª—å —Ä–∞—Å–ø–∞—Ä–∞–ª–ª–µ–ª–∏–≤–∞–Ω–∏—è –∑–∞–¥–∞—á .. –≤–Ω–µ–∑–∞–ø–Ω–æ –Ω–µ –ø–æ–¥—Ö–æ–¥–∏—Ç –¥–ª—è —Ç–∞–∫–æ–π —Ä–∞–±–æ—Ç—ã. –ö—É–¥–∞ –∏–Ω—Ç–µ—Ä–µ—Å–Ω–µ–µ –≤ —ç—Ç–æ–º –ø–ª–∞–Ω–µ –º–µ—Ö–∞–Ω–∏–∑–º—ã –º–µ–∂–∑–∞–¥–∞—á–Ω–æ–≥–æ –≤–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤–∏—è —è–∑—ã–∫–∞ –ê–¥–∞. –ü—Ä–∞–≤–¥–∞ –æ–Ω –ø–æ—Ö–æ–∂–µ –¥–∞–≤–Ω–æ –∑–∞–±—Ä–æ—à–µ–Ω..
P.S. –Ω–µ—Å–∫–æ–ª—å–∫–æ —Å—É–º–±—É—Ä–Ω–æ –Ω–∞–ø–∏—Å–∞–ª .. –Ω—É –¥–∞ –ª–∞–¥–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞–π 22, 2017 13:31:54
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2116
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18403–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 2
Vladimir1962 –ø–∏—Å–∞–ª(–∞):
—è–∑—ã–∫–∞ –ê–¥–∞. –ü—Ä–∞–≤–¥–∞ –æ–Ω –ø–æ—Ö–æ–∂–µ –¥–∞–≤–Ω–æ –∑–∞–±—Ä–æ—à–µ–Ω
–û—á–µ–Ω—å –¥–∞–∂–µ –Ω–µ –∑–∞–±—Ä–æ—à–µ–Ω, –¥–∞–∂–µ
–∫–æ–Ω–∫—É—Ä—Å—ã –≤—Å—è–∫–∏–µ –ø—Ä–æ–≤–æ–¥—è—Ç—Å—è...
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Vladimir1962
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞–π 22, 2017 14:48:17
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞–π 21, 2017 16:43:56–°–æ–æ–±—â–µ–Ω–∏–π: 22
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü–∞—Å–∏–±–∫–∏, –Ω–µ –∑–Ω–∞–ª. –ñ–∞–ª—å —á—Ç–æ –Ω—É –æ—á–µ–Ω—å –¥–∞–≤–Ω–æ, –µ—â—ë –¥–æ —Å—Ç–∞–Ω–¥–∞—Ä—Ç–∞ "–ê–¥–∞-95" –ø–æ–ª—å–∑–æ–≤–∞–ª —ç—Ç–æ—Ç —è–∑—ã–∫. –î–∞ –∏ –∫–∞–∫-—Ç–æ –∫–æ–Ω–∫—Ä—É—Å –∏—Å–∫–ª—é—á–∏—Ç–µ–ª—å–Ω–æ –ø–æ–¥ STM32F4xx .. –µ—Å—Ç—å STM32F405, –Ω–æ —è –µ–≥–æ –µ—â—ë –Ω–µ —Ä–∞—Å–ø–∞–∫–æ–≤—ã–≤–∞–ª. –°—Ä–æ–∫ –¥–æ —Å–µ–Ω—Ç—è–±—Ä—è .. –º–∞–ª–æ–≤–∞—Ç–æ –≤—Ä–µ–º–µ–Ω–∏, —á—Ç–æ–±—ã –≤—Å–ø–æ–º–Ω–∏—Ç—å —è–∑—ã–∫, —Ä–∞–∑–æ–±—Ä–∞—Ç—å—Å—è —Å –Ω–æ–≤—ã–º –¥–ª—è —Å–µ–±—è –ø—Ä–æ—Ü–æ–º –∏ —á—Ç–æ-—Ç–æ –∑–∞–∫–æ–¥–∏—Ç—å "–æ—Ä–∏–≥–∏–Ω–∞–ª—å–Ω–æ–µ".
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
oleg110592
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ó–∞—á–µ–º –Ω—É–∂–Ω–∞ RTOS –Ω–∞ AVR
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞–π 22, 2017 15:05:11
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 32
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 482
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 10, 2011 17:46:25–°–æ–æ–±—â–µ–Ω–∏–π: 3832
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∫–æ–º–ø–∏–ª—è—Ç–æ—Ä ADA —Å IDE AdaMULTI –ø–æ –ø—Ä–µ–∂–Ω–µ–º—É –≤—ã–ø—É—Å–∫–∞–µ—Ç —É—Å–ø–µ—à–Ω–æ Green Hills
http://www.ghs.com/products/AdaMULTI_IDE.html ADA –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω–∞ –≤ INTEGRITY-178 RTOS.
http://www.ghs.com/products/safety_crit ... -178b.html –¶–∏—Ç–∞—Ç–∞:
Integrity — операционная система реального времени, разработанная калифорнийской компанией Green Hills Software. Сертифицирована на соответствие POSIX. Ориентирована на однопроцессорные встраиваемые системы, в центральном процессоре которых есть блок управления памятью (архитектуры ARM, XScale, Blackfin, Freescale ColdFire, MIPS, PowerPC, x86). Система основана на микроядре µ-velosity. Главная особенность системы — отказоустойчивость (если произойдет отказ в какой-либо программе запущенной в этой операционной системе, система в целом будет продолжать работать в штатном режиме, а перезапуск упавшего приложения попытается провести с предоставлением ему тех областей памяти данных, которые были выделены приложению до его падения).
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 2 –∏–∑ 2
[ –°–æ–æ–±—â–µ–Ω–∏–π: 33 ]
,
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 13
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è










")