первая часть текстовой строки = бинарные данные в HEX-коде, вторая часть - те же данные, но в ASCII.
ТОЧНО!!!
блин, онлайн ресурс меня подвел -
http://www.asciitohex.com/
он не умеет читать посылку в которой содержаться нечитаемые данные!!!!
надо бы другой ресурс присмотреть....
Мне щас скинули еще один кусочек кода. На этот раз код не дешифруется ASCII
У меня самого нет возможности считать этот код.
( Товарищ в другом городе проживает )
Если есть вопросы к наполнению содержанием конкретных параметров - это, видимо, адресоваться к конкретной аппаратуре ЛА .
Не совсем так.
MAVlink - это универсальный протокол обмена данными для передачи телеметрии.
В частности большинство модельных полетных контроллеров ( автопилотов ) работает с этим протоколом.
Раньше использовали ASCII, но он очень "тяжелый" и по этому от него отказались.
Сейчас полетный контроллер опрашивает все возможные датчики и вставляет значения в протокол мавлинк.
Конкретных ЛА тут нет. Протокол универсален.
Дело в том, что мне поставили задачу выдернуть GPS данные из этого протокола и данные с БАРО датчика ( датчик высоты )
и дальше с ними поработать.
Нужно сделать самонаводящуюся антенну - проект открытый.
А у меня нет ни полетного контроллера, ни знаний протокола МАВЛИНК.
Даже подобных проектов в тырнете нет.
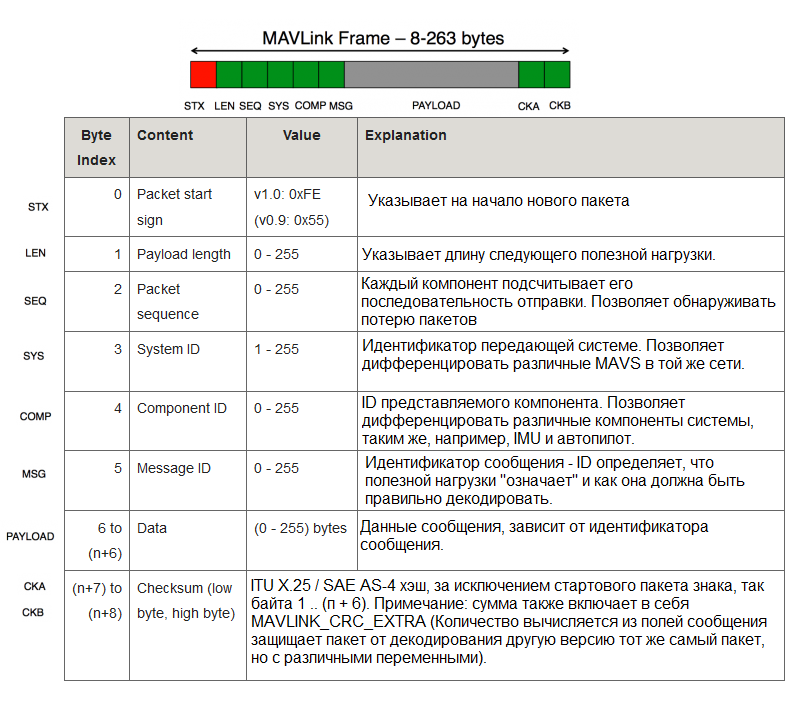
вот способ шифрования мавлинк
Попробую расшифровать один из пакетов ( которы мне скинули в первый раз )
Код: Выделить всё
FE 19 D3 01 01 16 00 00 00 00 10 01 B6 00 43 4F 4D 50 41 53 53 5F 4C 45 41 52 4E 00 00 00 02 43 12 // ю.У.........¶.COMPASS_LEARN....C.
Всего 33 байта
43 4F 4D 50 41 53 53 5F 4C 45 41 52 4E = COMPASS_LEARN
*****************************************************************************************************************************************************************
где
0) - FE - начало пакета
1) - 19 - указывает длину следующей полезной нагрузки ( десятич 25 ) все верно! 25 байт!!!
2) - d3 - Каждый компонент подсчитывает его последовательность отправки. Позволяет обнаруживать потерю пакетов. ( десятич 211 )
3) - 01 - идентификатор передающей системе. Позволяет дифференцировать различные MAVS в той-же сети.
4) - 01 - ID предоставляемого компонента. Позволяет дифференцировать различные компоненты системы, такие как IMU или автопилот
5) - 16 - идентификатор сообщения. ID определяет что означает сообщение и как его правильно декодировать. ( десятич 22 )
6) - 00 00 00 00 10 01 B6 00 43 4F 4D 50 41 53 53 5F 4C 45 41 52 4E 00 00 00 02 - сообщение ( 25 байт )
7и8) - 43 12 - контрольная сумма
теперь нужно расшифровать сообщение 00 00 00 00 10 01 B6 00 43 4F 4D 50 41 53 53 5F 4C 45 41 52 4E 00 00 00 02
00 00 00 00 10 01 B6 00 - ? ( 8 байт )
43 4F 4D 50 41 53 53 5F 4C 45 41 52 4E - это мы знаем - COMPASS_LEARN ( 13 байт )
00 00 00 02 - ? ( 4 байта )
тут остается посмотреть действительные значения с этого компаса и понять как они кодируются
Аналогично можно расковырять GPS координаты.