|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 1 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 79 ] |
, , , |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
maxlab

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 03, 2021 21:38:47 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
 |
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÆčüąĄą╝ ą┐čĆąĖą▓ąĄčé! ąśčēčā ąĄą┤ąĖąĮąŠą╝čŗčłą╗ąĄąĮąĮąĖą║ąŠą▓. ąøąŠą┤ą║ąĖ ą┐ąŠą║ą░ ąĮąĄčé, ąĮąŠ čüą║ąŠčĆąŠ ą▒čāą┤ąĄčé. ą¤čĆą░ą▓ą┤ą░ čāą▒ąĖčéą░čÅ ą▓ čģą╗ą░ą╝. ą¤ąŠą║ą░ čĆąĄčłą░čÄ čŹč鹊čé ą▓ąŠą┐čĆąŠčü, čĆąĄčłąĖą╗ ąĮą░ą║ą╗ąĄą┐ą░čéčī ą▓čüčÅą║ąĖčģ ą┤ą░čéčćąĖą║ąŠą▓ ąĖ ąŠą▒čŖąĄą┤ąĖąĮąĖčéčī ąĖčģ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā ModBUS. ą¤ą╗ą░ąĮąĖčĆčāąĄčéčüčÅ: ąÜą░č湥čüčéą▓ąŠ ą▓ąŠąĘą┤čāčģą░ (ą┐čĆąŠčéąĖą▓ąŠą┐ąŠąČą░čĆą║ą░) ąóąĄą╝ą┐ąĄčĆą░čéčāčĆą░, ą▓ą╗ą░ąČąĮąŠčüčéčī, ą░čéą╝. ą┤ą░ą▓ą╗ąĄąĮąĖąĄ (čéąĖą┐ą░ ą▒ą░čĆąŠą╝ąĄčéčĆ čÅčüąĮąŠ-ą┐ą░čüą╝čāčĆąĮąŠ-čāčĆą░ą│ą░ąĮ) ąÉąĮąĄą╝ąŠčĆčāą╝ą▒ąŠą╝ąĄčéčĆ ąŁčģąŠą╗ąŠčé ą┤ąŠ 100ą╝ (čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖčéąĖąĮą│ąŠą▓čŗą╣ čéčĆą░ąĮčüą┤čīčÄčüąĄčĆ ąĖą╗ąĖ čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╣) ąøą░ą│ (ąĪąÆą¦ ąĖą╗ąĖ čāą╗čīčéčĆą░ąĘą▓čāą║ąŠą▓ąŠą╣) ąĀą░ą┤ą░čĆ-ą┤ąĄč鹥ą║č鹊čĆ ąÉąśąĪ ąÉą▓č鹊ą┐ąĖą╗ąŠčé( ą╝ą░ą│ąĮąĖčéąĮčŗą╣/GPS ą║čāčĆčü, ą▓ąĄč鹥čĆ) ąĪąĖčüč鹥ą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖąČąĄč鹥ą╗ąĄą╝ (BLDC) ąØčā ąĖ čé.ą┤ ą» čéčāčé čāąČąĄ ąĮą░ ą┐ąŠą╗ą╗čÅą╝ą░ ąĮą░ą│ąŠą▓ąŠčĆąĖą╗... ąś, ą▓ ą║ą░č湥čüčéą▓ąĄ ą▒čĆąĄą┤ą░ - ą┐ąŠą╗ąĮąŠąĄ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą░ą║ąĖ ą┤čĆąŠąĮ 
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
phalanx
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 04, 2021 05:00:18 |
|
ąÜą░čĆą╝ą░: -8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 3
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 24, 2021 18:42:11
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 111
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
IMHO, ą▓ čüčāą┤ąŠą▓čŗčģ čāčüą╗ąŠą▓ąĖčÅčģ ą▓ ą║ą░č湥čüčéą▓ąĄ čüą▓čÅąĘąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN čāąČąĄ ąĮčāąČąĄąĮ. Arduino ąĮąĖą║ą░ą║ąĖą╝ ą▒ąŠą║ąŠą╝. ąśą╗ąĖ ąÆą░ą╝ čāč鹊ą┐ąĮčāčéčī? ąśą╗ąĖ čĆąĄčćčī ąŠ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖąĖ (ą▒ąĄčüą┐ąĖą╗ąŠčéąĮąŠą╝ čüčāą┤ąĮąĄ) ąĖą┤ąĄčé?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 04, 2021 14:49:30 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
IMHO, ą▓ čüčāą┤ąŠą▓čŗčģ čāčüą╗ąŠą▓ąĖčÅčģ ą▓ ą║ą░č湥čüčéą▓ąĄ čüą▓čÅąĘąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN čāąČąĄ ąĮčāąČąĄąĮ. ąĪąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ. ąĀą░ąĘąĮčŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĖ čüčāą┤ąŠą▓ąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čĆą░ąĘąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ąĖ čéčĆą░ąĮčüą┐ąŠčĆčéąĮčŗąĄ čāčĆąŠą▓ąĮąĖ. ąōą░čĆą╝ąĖąĮ ą▓ąŠąŠą▒čēąĄ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆčēąĖąĮąŠą╣ ąĘą░ąĮąĖą╝ą░ąĄčéčüčÅ. ąóčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé NMEA (RS-232), NMEA-2000 (CAN) ąĮčā ąĖ SeaTalk (EtherNet) ą┤ą╗čÅ ą▓ąĘą░ąĖą╝ąĮąŠą╣ ąĖąĮč鹥ą│čĆą░čåąĖąĖ. ą£ąŠą╣ ą▓čŗą▒ąŠčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąŠą▒čēąĄąĮąĖčÅ ModBUS ą╝ąĄąČą┤čā čüąĖčüč鹥ą╝ą░ą╝ąĖ ąŠą▒čāčüą╗ąŠą▓ą╗ąĄąĮ ą╗ąĖčćąĮčŗą╝ ąŠą┐čŗč鹊ą╝ ąĖąĮč鹥ą│čĆą░čåąĖąĖ 1ąĪ-ą¤čĆąĄą┤ą┐čĆąĖčÅčéąĖčÅ čü ą┐čĆąŠą╝.ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄą╝. ąś ąĮą░ ąĮąĄą▒ąŠą╗čīčłąŠą╣ ą┐ą░čĆčāčüąĮąŠą╣ ą╗ąŠą┤ą║ąĄ čéčĆą░ąĮčüą┐ąŠčĆčé RS-485 ą▒čāą┤ąĄčé ą║ čüčéą░čéąĖ, ą▒ąĖą║ąŠąĘ ąŠąĮ čģąŠčĆąŠčłąŠ čüąĄą▒čÅ ąĘą░čĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ą╗ ą▓ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┐ąŠą╝ąĄčģąŠąĘą░čēąĖčēąĄąĮąĮąŠčüčéčī). ąĪčéą░ą▒ąĖą╗čīąĮčāčÄ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ąŠą▒čĆą░čéčī ąĖąĘ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čĆčÅą┤ą░. ąś ą┐ąŠč湥ą╝čā "ąÉčĆą┤čāąĖąĮąŠ ąĮąĖą║ą░ą║ąĖą╝ ą▒ąŠą║ąŠą╝. ąśą╗ąĖ ąÆą░ą╝ čāč鹊ą┐ąĮčāčéčī"? ąÉčĆą┤čāąĖąĮąŠ - čŹč鹊 ąĮąĄ ąČąĄą╗ąĄąĘąŠ. ąÆčüąĄą│ąŠ ą╗ąĖčłčī ą┐ą╗ą░čéč乊čĆą╝ą░ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ą▓ ąŠčüąĮąŠą▓ąĄ ą║ąŠč鹊čĆąŠą╣ Processing. ą¢ąĄą╗ąĄąĘąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒čŗą╝. ą» ąĮą░ą┐čĆąĖą╝ąĄčĆ ą║ąĖčéą░ą╣čüą║ąĖąĄ čćąĖą┐čŗ ąĖčüą┐ąŠą╗čīąĘčāčÄ lgt8f328p ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ čü ą┤ą░čéčćąĖą║ąŠą▓. ąØąĄą┐ąŠč鹊ą┐ą╗čÅąĄą╝ąŠčüčéčī ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ ą┤čĆčāą│ąĖą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ąŁą╗ąĄą║čéčĆąŠąĮąĖą║ą░ ąĘą┤ąĄčüčī ąĮąĄ ą┐čĆąĖ č湥ą╝. ą¤čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą║ąŠąĮčüčéčĆčāą║čåąĖčÅ ą┤ą░čéčćąĖą║ąŠą▓ ą╝ąĖą║čĆąŠą║ą╗ąĖą╝ą░čéą░ ą▓ąĮčāčéčĆąĖ ą╗ąŠą┤ą║ąĖ.   ą¤ąŠčüą╗ąĄ ąŠčéą╗ą░ą┤ą║ąĖ ą║ąŠą┤ą░ ą▓čüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąŠčüčéąĖ ąĘą░ą╝ą░ąĘčŗą▓ą░čÄčéčüčÅ čåą░ą┐ąŠąĮ-ą╗ą░ą║ąŠą╝ ąĖ ą║ąŠčĆąŠą▒ąŠčćą║ą░ ą│ąĄčĆą╝ąĄčéąĖąĘąĖčĆčāąĄčéčüčÅ. ą¤ąŠą╗ąĮąŠąĄ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ - čŹč鹊 ą▓ąĖčłąĄąĮą║ą░ ąĮą░ č鹊čĆč鹥 . ą£ąŠąČąĮąŠ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ... ąĮąŠ čŹč鹊 ąĮąĄ č鹊čćąĮąŠ
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
kaetzchen
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 04, 2021 19:56:26 |
|
ąÜą░čĆą╝ą░: 43
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 257
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ą░ą┐čĆ 19, 2010 00:04:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 11998
ą×čéą║čāą┤ą░: ą£ą░ą╗ąŠčĆąŠčüčüąĖčÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą”ąĖčéą░čéą░: . ąÜą░č湥čüčéą▓ąŠ ą▓ąŠąĘą┤čāčģą░ (ą┐čĆąŠčéąĖą▓ąŠą┐ąŠąČą░čĆą║ą░) ą©ąŠ ą┤ą░čéčćąĖą║ ą┤čŗą╝ą░? ąØą░ ą╗ąŠą┤ą║ąĄ? ąØą░ą║čāčÅ? ąÆčŗ ąĖčłąŠ ą║ąŠą▓ąĖą┤ąĮčŗąĄ č鹥čüčéčŗ ąĮą░ ą░čĆą┤čāąĖąĮąŠ ąĘą░ą╝čāčéąĖč鹥...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 04, 2021 20:57:11 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąŁč鹊 ą┤ą░čéčćąĖą║ ąĮąĄ č鹊ą╗čīą║ąŠ ą┤čŗą╝ą░ ąĮąŠ ąĖ ą┐čĆąŠą┐ą░ąĮ-ą▒čāčéą░ąĮą░. ą×čé ąĘą░ąČąĖą│ą░ą╗ą║ąĖ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé. ąØą░ ą╗čÄą▒ąŠą╣ čüąĄčĆčīąĄąĘąĮąŠą╣ ą╗ąŠą┤ą║ąĄ ąĄčüčéčī ą│ą░ąĘąŠą▓ą░čÅ ą┐ą╗ąĖčéą░. ąÆą┤čĆčāą│ čāč鹥čćą║ą░ . ą¤ąŠąČą░čĆ ą▓ ąŠčéą║čĆčŗč鹊ą╝ ą╝ąŠčĆąĄ - čŹč鹊 ą▒ąĄą┤ą░. ą»čģčéčŗ ą│ąŠčĆčÅčé. ąÆąŠčé... čüą┐ąĖčćą║ąĖ ą┤ąĄčéčÅą╝ ąĮąĄ ąĖą│čĆčāčłą║ąĖ https://www.youtube.com/watch?v=WJz1j6Z_8j4
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
AndyGU70
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ąĮąŠčÅ 05, 2021 15:00:46 |
|
| ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ |
ąÜą░čĆą╝ą░: -7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -6
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą░ą┐čĆ 17, 2019 01:53:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 218
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Virtuino ModBUS ą░ą▓č鹊čĆčā ą▓ ą┐ąŠą╝ąŠčēčī..
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 10, 2021 00:14:17 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6875
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé č乥ą▓ 04, 2022 22:40:42 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
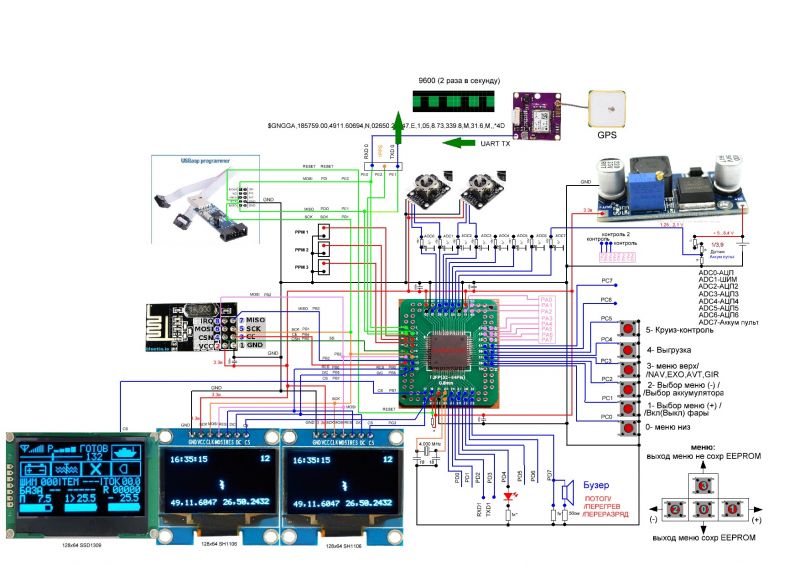
ąÆčüąĄą╝ čÅčģčéčüą╝ąĄąĮą░ą╝ ąĖ čüąŠčćčāą▓čüčéą▓čāčÄčēąĖą╝ ą┐čĆąĖą▓ąĄčé! ąŚą░ą│čĆąĄą╝ąĄą╗ ą▓ ą│ąŠčüą┐ąĖčéą░ą╗čī čü ą║ąŠą▓ąĖą┤ą╗ąŠą╣, ą┐ąŠčŹč鹊ą╝čā ą╝ąĄčüčÅčå ąĮąĄ ąŠčéčüą▓ąĄčćąĖą▓ą░ą╗  ąÜą░ą║ ą▓čŗą┐ąĖčüą░ą╗čüčÅ čéą░ą║ čüčĆą░ąĘčā ą┐ąŠąĮąĄčüą╗ąŠčüčī...  ą¤ąĄčĆą▓čŗą╣ ą║ąŠą╝ą┐ą╗ąĄą║čé ą┤ą░čéčćąĖą║ąŠą▓ ą│ąŠč鹊ą▓. ąÆčŗą║ą╗ą░ą┤čŗą▓ą░čÄ čüą║ąĄčéčć. ąÆ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖčÅčģ ą║ ą║ąŠą┤čā ąĮą░ą┐ąĖčüą░ąĮąŠ ą║čāą┤ą░ čćč鹊 ą┐ąŠą┤čüąŠąĄą┤ąĖąĮčÅčéčī. ą¤ąĖčéą░ąĮąĖąĄ - DC/DC ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī čü 8-18 ąĮą░ 5 ą▓ąŠą╗čīčé. ąóčĆą░ąĮčüąĖą▓ąĄčĆ RS485 ą╗čÄą▒ąŠą╣, čü čüąĖą│ąĮą░ą╗ąŠą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: // ąöą╗čÅ ą║ąĖčéą░ą╣čüą║ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ LGT8F328P. ąóą░ą║č鹊ą▓ą░čÅ 32 ą╝ąōčå
#include <WDT.h>
#include "DHTStable.h"
#include "BMP085.h" //BMP-180 ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ č湥čĆąĄąĘ I2C (SCL,SDA)
#include <Wire.h>
#include <ModbusRtu.h> //ą¤čĆąŠč鹊ą║ąŠą╗ ModbusRTU
#define TXEN 7 //ąØąŠą│ą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝ ą┐čĆąĖąĄą╝/ą┐ąĄčĆąĄą┤ą░čćą░
#define DEV_ID 1 //ąØąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░
#define Air_Quality A0 //ąØąŠą│ą░ ą┤ą░čéčćąĖą║ą░ ą║ą░č湥čüčéą▓ą░ ą▓ąŠąĘą┤čāčģą░ (ą┐čĆąŠą┐ą░ąĮ-ą▒čāčéą░ąĮ ąĖ čāą│ą░čĆąĮčŗą╣ ą│ą░ąĘ)
#define DHT22_PIN 12 //ąØąŠą│ą░ DHT-22
uint16_t fld_data[4] = {0,0,0,0}; //ą£ą░čüčüąĖą▓ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ
DHTStable DHT;
BMP085 myBarometer; //ą¤ąŠą┤ą║ą╗čÄč湥ąĮ ą║ i2c
Modbus slave(DEV_ID,0,TXEN);
void setup() {
analogReference(INTERNAL4V096); //ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ąŠą┐ąŠčĆąĮąĖą║ ąĮą░ 4,096V
wdt_enable(WTO_8S); //ąĪč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ ąĮą░ 8 čüąĄą║.
pinMode(Air_Quality,INPUT);
pinMode(LED_BUILTIN,OUTPUT);
Serial.begin(115200);
myBarometer.init(); //ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ BMP180
slave.start(); //ąŚą░ą┐čāčüą║ ModbusRTU
}
void loop() {
wdt_reset(); // ąĪą▒čĆąŠčü čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░
delay(500);
DHT.read22(DHT22_PIN);
fld_data[0] = analogRead(Air_Quality); // ąóąĄą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čü ą┤ą░čéčćąĖą║ąŠą▓ ą┐ąĖčłąĄą╝ ą▓ ą╝ą░čüčüąĖą▓
fld_data[1] = DHT.getHumidity()*10;
fld_data[2] = DHT.getTemperature();
fld_data[2] = ((fld_data[2]+myBarometer.bmp085GetTemperature(myBarometer.bmp085ReadUT())) / 2)*10;
fld_data[3] = (myBarometer.bmp085GetPressure(myBarometer.bmp085ReadUP())/133.3223684)*10; //ą¤ąĄčĆąĄą▓ąŠą┤ąĖą╝ ą▓ ą╝ą╝.čĆčéčüčé
digitalToggle(LED_BUILTIN); //ą£ąŠčĆą│ą░ąĄą╝
slave.poll(fld_data,4);
digitalToggle(LED_BUILTIN); //ą£ąŠčĆą│ą░ąĄą╝
}
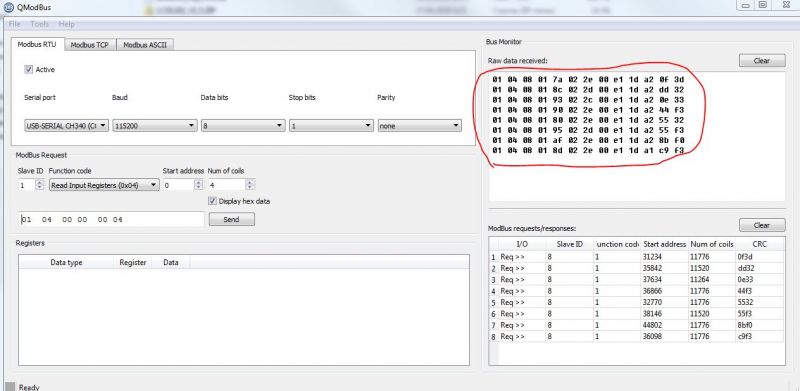
ąŁč鹊čé ą║ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ąĮą░ ą╗čÄą▒ąŠą╣ ąĮą░ąĮąŠ,ą┐čĆąŠ ą╝ąĖą║čĆąŠ,čāąĮąŠ ąĘą░čĆą░ą▒ąŠčéą░čéčī ąÜąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░ą╗ čĆą░ą▒ąŠčéčā čü ą┐ąŠą╝ąŠčēčīčÄ QModBus. ąöą░ąĮąĮčŗąĄ ąĖą┤čāčé ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ  ą¤ąŠčéčĆąŠčģą░ ą▒čāą┤čā ą│ąĄčĆą╝ąĄčéąĖąĘąĖčĆąŠą▓ą░čéčī.  ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ 73 ą╝ąÉ ąĪą╗ąĄą┤čāčÄčēąĄąĄ ąĮą░ ąŠč湥čĆąĄą┤ąĖ čŹč鹊 ą┤ą░čéčćąĖą║ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮąŠą╣ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 16:20:59 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤čĆąĖą▓ąĄčé! ąöąŠą▒ą░ą▓ąĖą╗ ą░ą║čéąĖą▓ąĮčāčÄ ą┐ąĖčēą░ą╗ą║čā ąĮą░ 2 ąĮąŠą│čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąØąĄą╝ąĮąŠą│ąŠ ą┐čĆąĖč湥čüą░ą╗ čüą║ąĄčéčć ą×ą║ąŠąĮčćą░č鹥ą╗čīąĮą░čÅ čĆąĄą┤ą░ą║čåąĖčÅ: ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: // ąöą╗čÅ ą║ąĖčéą░ą╣čüą║ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ LGT8F328P. ą¤ą╗ą░čéą░ SSOP-20 MiniEVB. ąóą░ą║č鹊ą▓ą░čÅ 32 ą╝ąōčå, ą┐ąĖčéą░ąĮąĖąĄ 5v
#include <WDT.h>
#include "DHTStable.h"
#include "BMP085.h" //BMP-180 ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ č湥čĆąĄąĘ I2C (SCL,SDA)
#include <Wire.h>
#include <ModbusRtu.h> //ą¤čĆąŠč鹊ą║ąŠą╗ ModbusRTU
#define TXEN 7 //ąØąŠą│ą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝ ą┐čĆąĖąĄą╝/ą┐ąĄčĆąĄą┤ą░čćą░
#define DEV_ID 1 //ąØąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░
#define BEEP 2 //ąÉą║čéąĖą▓ąĮčŗą╣ Buzzer
#define Air_Quality A0 //ąØąŠą│ą░ ą┤ą░čéčćąĖą║ą░ ą║ą░č湥čüčéą▓ą░ ą▓ąŠąĘą┤čāčģą░ (ą┐čĆąŠą┐ą░ąĮ-ą▒čāčéą░ąĮ ąĖ čāą│ą░čĆąĮčŗą╣ ą│ą░ąĘ) MQ-2
#define DHT22_PIN 12 //ąØąŠą│ą░ DHT-22
#define BAD_AIR_QUALITY 1200 //ąöą╗čÅ ą┤ą░čéčćąĖą║ą░ MQ-2 ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ą╣ą┤ąĄąĮąĮąŠąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠ
uint16_t fld_data[4] = {0,0,0,0}; //ą£ą░čüčüąĖą▓ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ
DHTStable DHT;
BMP085 myBarometer;
Modbus slave(DEV_ID,Serial,TXEN); // ąĪą╗ąĄą╣ą▓ čĆąĄąČąĖą╝
void setup() {
analogReference(INTERNAL4V096); //ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ąŠą┐ąŠčĆąĮąĖą║ ąĮą░ 4,096V (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ lgt8f328p)
wdt_enable(WTO_8S); //ąĪč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ ąĮą░ 8 čüąĄą║.
pinMode(Air_Quality,INPUT);
pinMode(LED_BUILTIN,OUTPUT);
pinMode(BEEP,OUTPUT);
Serial.begin(38400); //ą×ą┐čéąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą┤ą╗čÅ ą╝ąŠąĄą│ąŠ čüą╗čāčćą░čÅ
myBarometer.init(); //ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ BMP180
slave.start(); //ąŚą░ą┐čāčüą║ ModbusRTU
}
void loop() {
wdt_reset(); // ąĪą▒čĆąŠčü čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░
delay(500);
DHT.read22(DHT22_PIN);
fld_data[0] = analogRead(Air_Quality); // ąóąĄą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čü ą┤ą░čéčćąĖą║ąŠą▓ ą┐ąĖčłąĄą╝ ą▓ ą╝ą░čüčüąĖą▓
fld_data[1] = DHT.getHumidity()*10; // čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▓ 2 ą▒ą░ą╣čéą░ (čāą╝ąĮąŠąČąĄąĮąĖąĄ ąĮą░ 10 ą│ą┤ąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ)
fld_data[2] = DHT.getTemperature();
fld_data[2] = ((fld_data[2]+myBarometer.bmp085GetTemperature(myBarometer.bmp085ReadUT())) / 2)*10;
fld_data[3] = (myBarometer.bmp085GetPressure(myBarometer.bmp085ReadUP())/133.3223684)*10; //ą¤ąĄčĆąĄą▓ąŠą┤ąĖą╝ ą▓ ą╝ą╝.čĆčéčüčé
if (fld_data[0] > BAD_AIR_QUALITY) alarm();//ąĪąĖą│ąĮą░ą╗ čéčĆąĄą▓ąŠą│ąĖ
digitalToggle(LED_BUILTIN); //ą£ąŠčĆą│ą░ąĄą╝. ąÜąŠčĆąŠčéą║ąĖąĄ ą▓čüą┐čŗčłą║ąĖ - ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮąĄ ą▓ąĖčüąĖčé. ąöą╗ąĖąĮąĮčŗąĄ ą▓čüą┐čŗčłą║ąĖ - ąĖą┤ąĄčé ąŠą▒ą╝ąĄąĮ ą┐ąŠ RS485
slave.poll(fld_data,4); //ą¤čĆąŠą▓ąĄčĆą║ą░ ą▓čģąŠą┤čÅčēąĖčģ ąĘą░ą┐čĆąŠčüąŠą▓ ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ą╝ą░čüčüąĖą▓ą░ ą╝ą░čüč鹥čĆčā
digitalToggle(LED_BUILTIN);
}
void alarm() { //ąĪąĖą│ąĮą░ą╗ čéčĆąĄą▓ąŠą│ąĖ - 3 ą│čāą┤ą║ą░
for (int k=0;k<6;k++) {
digitalToggle(BEEP);
delay(200);
}
digitalWrite(BEEP, LOW);
}
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 16:52:40 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6875
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:00:19 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜčĆčāč鹊 ąÆčŗ čéą░ą╝ ąĮą░ą▓ąĄčĆč鹥ą╗ąĖ...  ąÆ ą╝ąŠąĄą╝ ą┐ąŠąĮąĖą╝ą░ąĮąĖąĖ ą┤ą░čéčćąĖą║ "ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮąŠą╣ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ", ą┐čĆąĖą╝ąĄąĮąĖč鹥ą╗čīąĮąŠ ą║ ą╗ąŠą┤ą║ąĄ, čŹč鹊 ą╝ą░ą│ąĮąĖčéąĮčŗą╣ ą║čāčĆčü, ą║čĆąĄąĮ ąĖ ą║čāčĆčüąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ čü GPS. ąÜąŠąŠčĆą┤ąĖąĮą░čéčŗ ą▓ ą┤ąŠą╗ą│ąŠč鹥 ąĖ čłąĖčĆąŠč鹥 ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ ą┐ąŠč鹊ą╝, ą║ąŠą│ą┤ą░ ą▓čüčéą░ąĮąĄčé ąĘą░ą┤ą░čćą░ ąĮą░čāčćąĖčéčī ą░ą▓č鹊ą┐ąĖą╗ąŠčé čģąŠą┤ąĖčéčī ą┐ąŠ ąĘą░čĆą░ąĮąĄąĄ ąĘą░ą┤ą░ąĮąĮąŠą╝čā čéčĆąĄą║čā. ą£ą░ą│ąĮąĖčéąĮčŗą╣ ą║čāčĆčü ąĖ ą║čĆąĄąĮ ąĮą░ą╝ąĄčĆąĄąĮ ą┐ąŠą╗čāčćąĖčéčī ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ MPU-6500 + HMC5883. ąĄčüčéčī ą│ąŠč鹊ą▓čŗąĄ ą╗ąĖą▒čŗ čćč鹊ą▒čŗ ą┤ą░ąĮąĮčŗąĄ čü čŹčéąĖčģ ą╝ąŠą┤čāą╗ąĄą╣ čüčĆą░ąĘčā ą▓ ąŁą╣ą╗ąĄčĆąŠą▓čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą┐ąĄčĆąĄčüčćąĖčéčŗą▓ą░čéčī. ąÉ čéą░ą╝ ąĄčüčéčī ą▓čüąĄ. ąś ą║čāčĆčü ąĖ čéą░ąĮą│ą░ąČ ąĖ ą║čĆąĄąĮ. ąÜčĆąĄąĮ č鹊ąČąĄ ąĮčāąČąĄąĮ ą▒čāą┤ąĄčé ą░ą▓č鹊ą┐ąĖą╗ąŠčéčā. ą×ą┤ąĖąĮ ąĖąĘ ą║čĆąĖčéąĖč湥čüą║ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čćč鹊ą▒čŗ ąĮąĄ ą╗ąĄčćčī ą┐ą░čĆčāčüą░ą╝ąĖ ąĮą░ ą▓ąŠą┤čā ąĖą╗ąĖ čāą╣čéąĖ ą▓ ą▒čĆąŠčćąĖąĮą│
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Martian
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:09:14 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 29
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1321
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą┤ąĄą║ 18, 2021 19:25:32
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 10465
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
MPU-6500 ąĖą╝ąĄąĄčé čüčéą░čéčāčü Not recommended for new designs
_________________
ą┤ąŠą▒ą░ą▓čī radiokot.ru##.tablebg > tbody > tr:has(td>a[href*="?f=17"]) ą▓ ą░ą┤ą▒ą╗ąŠą║, čüą┤ąĄą╗ą░ą╣ č乊čĆčāą╝ čćąĖčēąĄ!
"ąŁ-čŹ-čŹ-čģąĄą╣... čĆą░čüčéčæčé ą┐čĆą░ą▓ąŠčüąŠąĘąĮą░ąĮąĖąĄ!"
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:10:17 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
MPU-6500 ąĖą╝ąĄąĄčé čüčéą░čéčāčü Not recommended for new designs ąöčĆčāą│ąĖčģ ąĮąĄčéčā
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:41:02 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6875
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:47:10 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąóčāčé ą▓čüąĄ ą┐čĆąŠčüč鹊... ąóą░ą║ ą║ą░ą║ ą╗ąŠą┤ą║ą░ ąĮąĄ ąĖą│čĆčāčłąĄčćąĮą░čÅ, ą▒čāą┤čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄčéą▒čāą║ ą┤ą╗čÅ čüą▒ąŠčĆą░ ą┤ą░ąĮąĮčŗčģ čü Processing (ą║ą░ą║ ą▓ą░čĆąĖą░ąĮčé).
ąŻ čéą░ą║ąŠą│ąŠ čĆąĄčłąĄąĮąĖčÅ ąĄčüčéčī ą▓ą░ąČąĮąŠąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ... ąØąĄ ąĮą░ą┤ąŠ ą╗ąĄą┐ąĖčéčī Master čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąĢčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖąĮč鹥ą│čĆą░čåąĖąĖ čü OpenCPN.
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:47:55 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6875
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:51:33 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:52:04 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6875
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
OpenCPN... ąĮąĄ čĆą░ą▒ąŠčéą░ą╗ čü čéą░ą║ąĖą╝... 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
maxlab
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 06, 2022 17:55:05 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 30
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 375
ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
OpenCPN... ąĮąĄ čĆą░ą▒ąŠčéą░ą╗ čü čéą░ą║ąĖą╝... ąÆ OpenCPN ąĄčüčéčī ą│ąŠč鹊ą▓čŗą╣ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ ą╝ąŠą┤čāą╗čī ą░ą▓č鹊ą┐ąĖą╗ąŠčéą░ ąĮą░ą┐ąĖčüą░ąĮąĮčŗą╣ ąĮą░ ą¤ąĖč鹊ąĮąĄ. ąÆąŠą┐čĆąŠčü č鹊ą╗čīą║ąŠ ą▓ ąĖąĮč鹥ą│čĆą░čåąĖąĖ.
_________________
ąöąĄą▓ąĖčåąĄ - Device
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 07, 2022 01:38:29 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6875
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą┤ąĄą╗ą░ą╗ąĖ ą┐ąŠ čĆą░ą┤ąĖąŠ... https://www.radiokot.ru/forum/download/ ... ?id=313952ą┤ąĄą╗ą░ą╗ąĖ ą┐ąŠ Wi-Fi... https://www.radiokot.ru/forum/download/ ... 074fd886f3ą┤ąĄą╗ą░ą╗ąĖ ą┐ąŠ ą▓čüčÅą║ąŠą╝čā)) ąŠčé ModBUS ąŠčéą║ą░ąĘą░ą╗ąĖčüčī... ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 5 minutes 28 seconds:ą┐ąŠą┤ą║ą╗čÄčćą░ą╗ąĖ ą▓čüčÅą║ąĖąĄ ą┤ą░čéčćąĖą║ąĖ... ą│ąĖčĆąŠčüą║ąŠą┐čŗ... ą║ąŠą╝ą┐ą░čüčŗ... ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆčŗ... ąĖ čé.ą┤. ą▓čüčæ ą▓čŗą▓ąŠą┤ąĖą╗ąĖ ąĮą░ 菹║čĆą░ąĮ ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ą╗ąĖ ą┐ąŠ čĆą░ą┤ąĖąŠ... čü čŹčéąĖą╝ ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄ ą▓ąŠąĘąĮąĖą║ą╗ąŠ)) ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĮą░čćą░ą╗ąĖčüčī čü ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ą▓čüąĄčģ čŹčéąĖčģ ą┤ą░ąĮąĮčŗčģ... ą┐ąŠčüčćąĖčéą░čéčī... ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī... ąĖ čé.ą┤. ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ąĖąĘ ąĮą░čłąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĮąĄ čüčāą╝ąĄą╗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ąĖ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┤ą░ąĮąĮčŗąĄ čüąŠ ą▓čüąĄčģ ą┤ą░čéčćąĖą║ąŠą▓ ą┤ą░ąĮąĮčŗąĄ... ą░ ą╝ąĮąĄ ąŠą┤ąĮąŠą╝čā ą▓čüčæ čŹč鹊 ą┤ąŠą╗ą│ąŠ...)) č鹥ą╝ ą▒ąŠą╗ąĄąĄ ą▒ąĄąĘ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ąĮą░ ą┐čĆąŠčüč鹊ą╝ AVR ))  ąĮčā ąĄčüą╗ąĖ ąĄčüčéčī ą│ąŠč鹊ą▓čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┐ąŠą┤ ą░čĆą┤čāąĖąĮąŠ... č鹊ą│ą┤ą░ ą┤čāą╝ą░čÄ ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄ ą▒čāą┤ąĄčé)) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 13 minutes 15 seconds:ą░ą▓č鹊ą┐ąĖą╗ąŠčé... https://create.arduino.cc/projecthub/ma ... tem-b880bdąĮąĄ ąĘąĮą░čÄ... čā ąĮą░čü ą▒čŗą╗ą░ ą┤čĆčāą│ą░čÅ ąĖą┤ąĄčÅ... AVR ąĮąĄ ąĘą░čģąŠč鹥ą╗ čüčćąĖčéą░čéčī ą║ąŠčüąĖąĮčāčüčŗ ąĖ čüąĖąĮčāčüčŗ)) ą┐ąŠčŹč鹊ą╝čā čĆąĄčłąĖą╗ąĖ ą▓čüčæ ą┤ąĄą╗ą░čéčī ąĮą░ ąĮąĄčéą▒čāą║ąĄ ąĖą╗ąĖ ą╗čÄą▒ąŠą╝ ą┤čĆčāą│ąŠą╣ ą│ą░ą┤ąČąĄč鹥... čéą░ą╝ čü čŹčéąĖą╝ ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄčé)) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 5 minutes 24 seconds:OpenCPN... https://habr.com/ru/post/572736/ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ čéą░ą║ąŠąĄ ą▓ąĖąČčā)) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 1 minute 48 seconds:ąĮą░ ą¤ąĖč鹊ąĮąĄ ą╝čŗ ą┐ąĖčüą░ą╗ąĖ... ą┐ąĖčüą░ą╗ąĖ... ą░ ą┐ąŠč鹊ą╝ ą┐ąĄčĆąĄčłą╗ąĖ ąĮą░ Java... č鹥ą┐ąĄčĆčī čā ą╝ąĄąĮčÅ ą▓čüčæ ąĮą░ Java.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 1 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 79 ] |
, , , |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 6 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|













{kind=link}
{kind=link}
