ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
ąĪčéčĆą░ąĮąĖčåą░ 3 ąĖąĘ 4
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 79 ]
, , ,
ąÉą▓č鹊čĆ
ąĪąŠąŠą▒čēąĄąĮąĖąĄ
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 07, 2022 00:35:56
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą¤čĆąĖą▓ąĄčé!
ą¤čĆąŠą┤ąŠą╗ąČą░ąĄą╝...
ą¤čĆąĖąĄčģą░ą╗ą░ ą░ą┐ąĄą╗čīčüąĖąĮą║ą░ (orange pi 3 lts). ąØą░ą╗ąĄą┐ąĖą╗ ąĮą░ ąĮąĄąĄ čĆą░ą┤ąĖą░č鹊čĆąŠą▓, čāčüčéą░ąĮąŠą▓ąĖą╗ ąĮą░ MicroSD ąŠą▒čĆą░ąĘ čāą▒čāąĮčéčŗ. ąÆąĘą╗ąĄč鹥ą╗ąŠ!
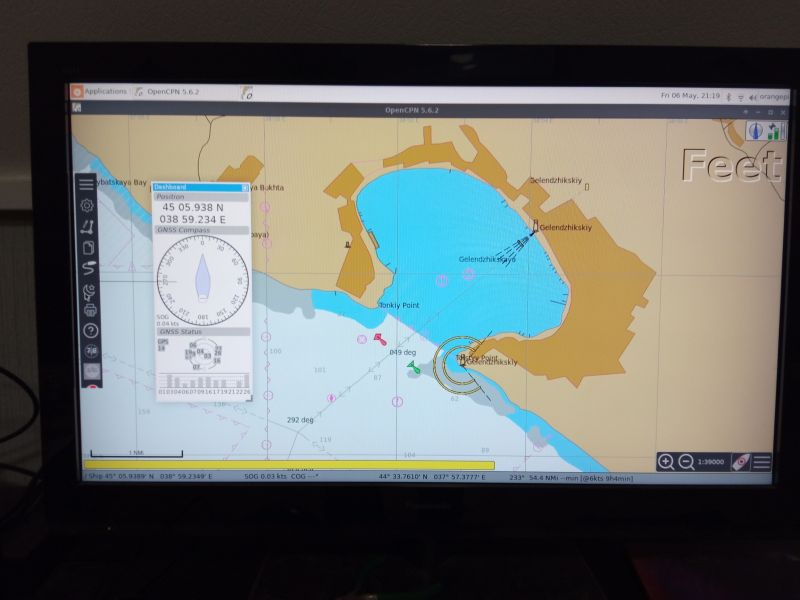
ą¤čĆąĖą║čĆčāčéąĖą╗ OpenCPN, ą┐ąŠą┤ą║ąĖąĮčāą╗ ą╝ąŠčĆčüą║ąĖąĄ ą║ą░čĆčéčŗ, ąĮą░čüčéčĆąŠąĖą╗ GPS/GLONASS.
ąĪąŠą▒čĆą░ą╗ ąĖąĘ ąĖčüčģąŠą┤ąĮąĖą║ąŠą▓ rtl-ais (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖčÅ čüčāą┤ąŠą▓)... č鹥čüčé čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┐čĆąŠčģąŠą┤ąĖčé. ąŚą░ą▓čéčĆą░ ąĮą░čéčāčĆąĮčŗąĄ ąĖčüą┐čŗčéą░ąĮąĖčÅ ąĮą░ ą┐ąŠą▒ąĄčĆąĄąČčīąĄ čüą┤ąĄą╗ą░čÄ. ą£ąŠąČąĄčé čāčüą┐ąĄčÄ
ąĖ ą┐čĆąĖąĄą╝ ą┐ąŠą│ąŠą┤ąĮčŗčģ čäą░ą║čüąŠą▓ ąĮą░čüčéčĆąŠąĖčéčī č湥čĆąĄąĘ čüą▓ąĖčüč鹊ą║ SDR
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ąØąŠą▓čŗą╣ąöąĄąĮčī
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 07, 2022 12:28:52
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: -6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -1
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 03, 2022 07:01:29ąĪąŠąŠą▒čēąĄąĮąĖą╣: 362
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąØčā, čÅčģčéčŗ čā ą╝ąĄąĮčÅ ąĮąĄčéčā, čÅ ąĮąĄ čĆąŠą┤čüčéą▓ąĄąĮąĮąĖą║ ąÉą▒čĆą░ą╝ąŠą▓ąĖčćą░, ą┐ąŠčŹč鹊ą╝čā ąŠčåąĄąĮąĖčéčī ąĘą░č鹥čÄ ąĮąĄ ą╝ąŠą│čā
ąÉ ą║ą░čüą░č鹥ą╗čīąĮąŠ ąČąĖą┐ąĖčŹčü-čéčĆąĄą║ąĄčĆą░, čÅ ą║ąŠą│ą┤ą░-č鹊 "ą┤ą╗čÅ ą┐ąŠą▒ą░ą╗ąŠą▓ą░čéčīčüčÅ" ą┤ąĄą╗ą░ą╗ ąĮą░ ą▒ą░ąĘąĄ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ STM32F746G-Disco.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 07, 2022 13:47:31
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąØčā, čÅčģčéčŗ čā ą╝ąĄąĮčÅ ąĮąĄčéčā, čÅ ąĮąĄ čĆąŠą┤čüčéą▓ąĄąĮąĮąĖą║ ąÉą▒čĆą░ą╝ąŠą▓ąĖčćą░...
ą£ąĖčĆąŠą╝ ą┐čĆą░ą▓čÅčé čüč鹥čĆąĄąŠčéąĖą┐čŗ
ąöą╗čÅ č鹊ą│ąŠ čćč鹊ą▒čŗ ąĖą╝ąĄčéčī čÅčģčéčā ąĮąĄ ąĮčāąČąĮąŠ ą▒čŗčéčī ąŠą╗ąĖą│ą░čĆčģąŠą╝. ą£ąŠąČąĮąŠ čāą╗ąŠąČąĖčéčīčüčÅ ą▓ ą▒čÄą┤ąČąĄčé ą┐ąŠą┤ąĄčƹȹ░ąĮąĮąŠą│ąŠ ą░ą▓č鹊. ąØą░ą┐čĆąĖą╝ąĄčĆ Maxi 77 ą▓ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖč鹥ą╗čīąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą┐ąŠ čåąĄąĮąĄ ą┤ąŠ 600 ą║ąĖą╗ąŠčĆčāą▒ą╗ąĄą╣. ąÆ čéą░ą║ąŠą╣ ąČąĄ ą▒čÄą┤ąČąĄčé ą╗čÅąČąĄčé ąĖ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮą░čÅ ą┐ąŠčüčéčĆąŠą╣ą║ą░... ą¤čĆą░ą▓ą┤ą░ čŹč鹊 ą┤ąŠą╗ą│ąŠ ąĖ ąĮąĄ ą▓čüąĄą╝ ą┐ąŠ ą┐ą╗ąĄčćčā.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 14, 2022 00:46:51
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąØą░čłąĄą╗ čÅ ą░ą┐ąĮąŠčāčé ąĮą░ MPU6500 ąĮą░ ą┐čĆąŠčåąĄą┤čāčĆčā čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąśčüą┐čĆą░ą▓ąĖą╗ ą▓ąĄąĮą┤ąŠčĆčüą║ąĖą╣ ą║ąŠą┤.
ąÆčāą░ą╗čÅ ...
ąÜąŠą┤... ą£ąŠąČąĄčé ą║ąŠą╝čā ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
ą£ąŠąČąĮąŠ ą┤ą▓ąĖą│ą░čéčīčüčÅ ą┤ą░ą╗čīčłąĄ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąŠą║čé 02, 2022 22:26:43
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 3
ąöąŠą▒čĆčŗą╣ ą▓ąĄč湥čĆ! ąŚą░ ą▓čüąĄ ą╗ąĄč鹊 ąĮąĖ čĆą░ąĘčā ąĮąĄ ą▒čĆą░ą╗ ą┐ą░čÅą╗ąŠ ą▓ čĆčāą║ąĖ ąĖ ąĮąĄ ąŠčéą║čĆčŗą▓ą░ą╗ Arduino IDE.
ąÜčāą┐ąĖčéčī ą┐ąŠą┤ąĄčƹȹ░ąĮąĮčāčÄ ą╗ąŠą┤ą║čā ą╝ąĮąĄ ąĮąĄ čāą┤ą░ą╗ąŠčüčī... ą┐ąŠ ą┐ąŠąĮčÅčéąĮčŗą╝ ą┐čĆąĖčćąĖąĮą░ą╝, ą┐ąŠčŹč鹊ą╝čā, čćč鹊ą▒čŗ ąĖą╝ąĄčéčī č鹊čćą║čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ
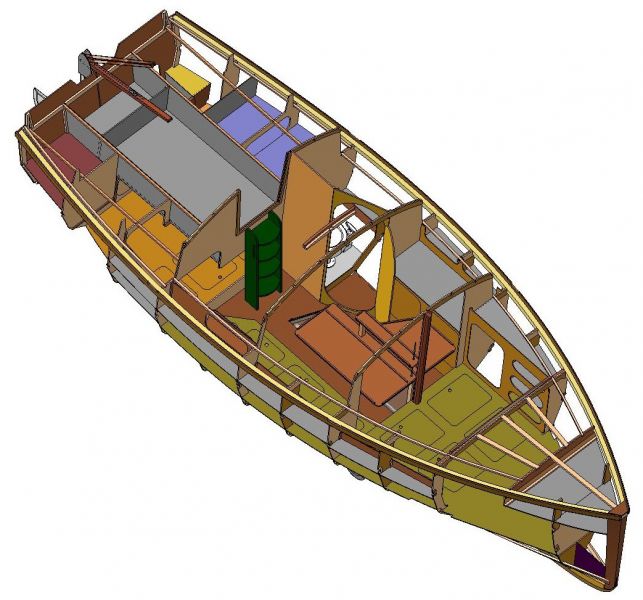
ą║ čüą▓ąŠąĖą╝ ąĖą┤ąĄčÅą╝ ą┐ąŠ č鹥čģąĮąŠčÅčģčéąĖąĮą│čā - čĆąĄčłąĖą╗ ą┐ąŠčüčéčĆąŠąĖčéčī. ąóą░ą║ čćč鹊 ą▓čüąĄ ą╗ąĄč鹊 ąĘą░ąĮąĖą╝ą░ą╗čüčÅ čüčāą┤ąŠčüčéčĆąŠąĄąĮąĖąĄą╝. ąÆąŠčé čćč鹊 ąĖąĘ čŹč鹊ą│ąŠ ą▓čŗčłą╗ąŠ:
ąĪčéčĆąŠąĖą╝ ą▓ąŠčé čŹč鹊
ąöą╗ąĖąĮą░ 6.5, čēąĖčĆąĖąĮą░ 2.5, ąŠčüą░ą┤ą║ą░ ą▒čāą┤ąĄčé 1.10
ąÆ čĆą░ąĘčĆąĄąĘąĄ
ą¤ąŠą║ą░ ą▓čŗą│ą╗čÅą┤ąĖčé čéą░ą║
ąĪąĄą│ąŠą┤ąĮčÅ ą╝ąŠąĮčéąĖčĆąŠą▓ą░ą╗ ą║ąĖą╗ąĄą▓čāčÄ ą▒ą░ą╗ą║čā
ąĢčēąĄ ą┤ą▓ąĄ ąĮąĄą┤ąĄą╗ąĖ ą▒čāą┤ąĄčé čüąĮąŠčüąĮą░čÅ ą┐ąŠą│ąŠą┤ą░. ąŚą░č鹥ą╝ čüčéčĆąŠą╣ą║čā ą║ąŠąĮčüąĄčĆą▓ąĖčĆčāčÄ ą┤ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ ą▓ąĄčüąĮčŗ ąĖ ąĘą░ą╣ą╝čāčüčī 菹╗ąĄą║čéčĆąŠąĮąĖą║ąŠą╣
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ąĀąĄą║ą╗ą░ą╝ą░
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąŠą║čé 19, 2022 21:11:51
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆčüąĄą╝ ą┐čĆąĖą▓ąĄčé!
ąĀą░ąĘąŠą▒čĆą░ą╗čüčÅ čü QMC5883L. ąŁč鹊čé ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆ ą▓ąĄčüčīą╝ą░ ąĮąĄ ą┐ą╗ąŠčģ, ąĮąĄ čüą╝ąŠčéčĆčÅ čćč鹊 čüč鹊ąĖčé čüčāčēąĖąĄ ą║ąŠą┐ąĄą╣ą║ąĖ.
ą¤ąŠą║ą░ąĘą░ąĮąĖčÅ čüčéą░ą▒ąĖą╗čīąĮčŗ ą┐ąŠčüą╗ąĄ 5 ą╝ąĖąĮčāčéąĮąŠą│ąŠ ą┐čĆąŠą│čĆąĄą▓ą░. ąóąŠčćąĮąŠčüčéčī ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░čćą░ą╗čīąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą¤ąŠą┤ą║ą╗čÄčćą░ą╗ ą┤ą░čéčćąĖą║ ą║ NodeMCU. ą¤čĆąŠčłąĖą▓ą║čā ą┐ąĖčüą░ą╗ ąĮą░ MicroPython. ą¤ąŠčüą╗ąĄ ąČąĄąĮąĖčéčīą▒čŗ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆą░ čü ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆąŠą╝ MPU-6500, ą║ąŠą┤ ą┐ąŠčĆčéąĖčĆčāčÄ ąĮą░ C. ąØą░ ą┐ąĖč鹊ąĮąĄ ą▒čŗčüčéčĆąĄąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
from machine import I2C,Pin
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 03, 2022 20:28:24
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąöąŠą▒čĆčŗą╣ ą▓ąĄč湥čĆ! ą¤ąŠą▒ąĄą┤ąĖą╗ čÅ ą┤ą░čéčćąĖą║ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮąŠą╣ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ ą┐čĆąĖą╝ąĄąĮąĖč鹥ą╗čīąĮąŠ ą║ ą╗ąŠą┤ą║ąĄ.
ąÆąŠčé ą║ąŠą┤ ąĮą░ ą┐ąĖč鹊ąĮąĄ, ą║ąŠą╝čā ąĖąĮč鹥čĆąĄčüąĮąŠ
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
# ąÜąĖčéą░ą╣čüą║ąĖą╣ ą║ą╗ąŠąĮ ąĮą░ RP2040 čü 16 Mb ąĮą░ ą▒ąŠčĆčéčā
ą×čĆąĖąĄąĮčéą░čåąĖčÅ ą┤ą░čéčćąĖą║ąŠą▓ čéą░ą║ą░čÅ
ą×čüčéą░ą╗ąŠčüčī ąĮą░ ąĪ ą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī ąĖ ąĘą░č鹊ą╗ą║ą░čéčī čŹč鹊 ą▓čüąĄ ą▓ lgt8f328p - ą░..ą╗čÅ ą░čĆą┤čāąĖąĮąŠ ą╝ąĖą║čĆąŠ
ąŚą░čéą░ą╗ą║ąĖą▓ą░čéčī ą▒čāą┤ąĄą╝ čüčÄą┤ą░
ąĢčüčéčī ąĄčēąĄ ąĖą┤ąĄčÅ ąĘą░ą╝ąŠčĆąŠčćąĖčéčīčüčÅ čü ą╝ąĖąĮąĖą░čéčÄčĆąĮčŗą╝ ą│čĆą░ą▓ąĖčéą░čåąĖąŠąĮąĮčŗą╝ ą┐ąŠą┤ą▓ąĄčüąŠą╝ ąĖ ą┐ąŠą╝ąĄčüčéąĖčéčī čéčāą┤ą░ ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆ. ąóąŠą│ą┤ą░ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖčÅ ąĮąĄ ąĮčāąČąĮą░ ą▒čāą┤ąĄčé. ąØąŠ ą▓ąŠąĘąĮąĖą║ąĮąĄčé ą│ąĄą╝ąŠčĆčĆąŠą╣ čü č鹊ą║ąŠčüčŖąĄą╝ąĮąĖą║ą░ą╝ąĖ. ąÆ ąŠą▒čēąĄą╝ ... ąĮą░ ą▒čāą┤čāčēąĄąĄ
ąÆą╗ąŠąČąĄąĮąĖčÅ:
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą║ čäą░ą╣ą╗čā: ąśčüč鹊čćąĮąĖą║ ą▓ą┤ąŠčģąĮąŠą▓ąĄąĮąĖčÅ
YMFC-32_document_1.pdf [85.9 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 49
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 06, 2022 13:33:26
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
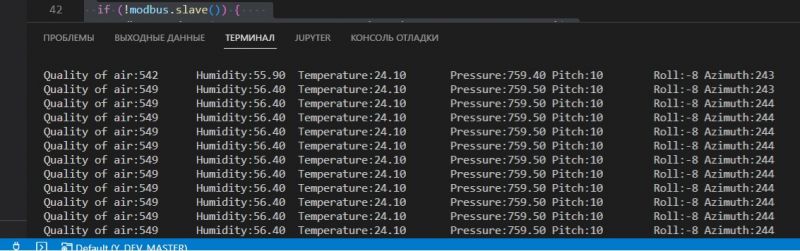
ąÆčüąĄą╝ ą┐čĆąĖą▓ąĄčé! ąöąŠčćąĖčéą░ą╗čüčÅ čÅ ą║ą░ą║ ą▓ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖčÄ ąĮą░ą║ą╗ąŠąĮąŠą▓ ą┐ąŠą┤ą╝ąĄčłą░čéčī ą┤ą░ąĮąĮčŗąĄ ą│ąĖčĆąŠčüą║ąŠą┐ą░. ąÆčĆąŠą┤ąĄ čĆą░ą▒ąŠčéą░ąĄčé. ą¤čĆąĄą┤čüč鹊ąĖčé ą▓čüąĄ čŹč鹊 ąĮą░ čüč鹥ąĮą┤ąĄ ąĖčüą┐čŗčéą░čéčī.
ąóąĄą┐ąĄčĆčī ą║ąŠą┤ ą▓čŗą│ą╗čÅą┤ąĖčé čéą░ą║:
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
# ąÜąĖčéą░ą╣čüą║ąĖą╣ ą║ą╗ąŠąĮ ąĮą░ RP2040 čü 16 Mb ąĮą░ ą▒ąŠčĆčéčā
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
roman.com
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 06, 2022 13:43:09
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6885ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 06, 2022 13:51:33
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
roman.com
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
roman.com
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 06, 2022 14:41:17
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6885ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąøąŠčĆčā ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗ąĖ...
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 10, 2022 19:59:49
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąöąŠą▒čĆčŗą╣ ą▓ąĄč湥čĆ! ą¤ąŠčĆčéąĖčĆąŠą▓ą░ą╗ ą║ąŠą┤ čü Python ąĮą░ C.
ąĀą░ą▒ąŠčćą░čÅ ą▓ąĄčĆčüąĖčÅ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą│ąĖčĆąŠčüą║ąŠą┐ą░
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
// LGT8F328P 32Mhz SSOP-20
ąĀą░ąĘą┤ąŠą▒čŗą╗ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ digital motion processing. ąĢčüą╗ąĖ ą▒čāą┤ąĄčé ą▓čĆąĄą╝čÅ ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ą║čĆčāčćčā čüčÄą┤ą░. ąś čéą░ą║ čģąŠčĆąŠčłąŠ čĆą░ą▒ąŠčéą░ąĄčé
ą¤čĆąĖ ą║čĆąĄąĮą░čģ +/- 15 ą│čĆą░ą┤čāčüąŠą▓, ą╝ą░ą│ąĮąĖčéąĮčŗą╣ ą║čāčĆčü ą┐ą╗ą░ą▓ą░ąĄčé ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 2čģ ą│čĆą░ą┤čāčüąŠą▓. ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąĘčāą╗čīčéą░čé ą┤ą╗čÅ ą┤ą░čéčćąĖą║ą░, č鹥ą╝ ą▒ąŠą╗ąĄąĄ čćč鹊 ąŠąĮ ąĮčāąČąĄąĮ ąĮąĄ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐ąŠ ą║ąŠą╝ą┐ą░čüčā.
ąÉ ą▓čüąĄą│ąŠ ą╗ąĖčłčī čāą┤ąĄčƹȹ░čéčī ą░ą▓č鹊čĆčāą╗ąĄą▓ąŠą│ąŠ ąĮą░ ą╝ą░ą│ąĮąĖčéąĮąŠą╝ ą╝ąĄčĆąĖą┤ąĖą░ąĮąĄ, ą┐ąŠą║ą░ ą╗ąŠą┤ą║ą░ č鹊ą┐č湥čéčüčÅ ąĮą░ ą╝ąĄčüč鹥 ą▓ čüą╗ą░ą▒čŗą╣ ą▓ąĄč鹥čĆ ąĖ ą┤ą░ąĮąĮčŗąĄ čü GPS ąĮąĄ ą┤ą░čÄčé č鹊čćąĮąŠą│ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖąČąĄąĮąĖčÅ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 23, 2022 13:22:33
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆčüąĄą╝ ąĮą░ą▒ą╗čÄą┤ą░čÄčēąĖą╝ ą┐čĆąĖą▓ąĄčé!
ą×ą║ąŠąĮčćą░č鹥ą╗čīąĮą░čÅ čĆąĄą┤ą░ą║čåąĖčÅ ą╝ą░ą│ąĮąĖčéąĮąŠą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ ą║čāčĆčüą░.
ąĪ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčīčÄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 20mA
ą¤ąŠčüą╝ąŠčéčĆčÄ ą║ą░ą║ ą┐ąŠą▓ąĄą┤ąĄčé čüąĄą▒čÅ ą▓ čĆąĄą░ą╗čīąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ 菹║čüą┐ą╗čāą░čéą░čåąĖąĖ.
ąĪą╗ąĄą┤čāčÄčēą░čÅ čĆąĄąĖąĮą║ą░čĆąĮą░čåąĖčÅ ą▒čāą┤ąĄčé čü ą║ą▓ą░čĆč鹥čĆąĮąĖąŠąĮą░ą╝ąĖ, DMP, ąĖ čü ą┐čĆąŠč湥ą╣ 菹╣ą╗ąĄčĆąŠą▓čüą║ąŠą╣ čģąĄčĆąĮąĄą╣.
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
//LGT8F328P SSOP-20 32Mhz internal
ąöą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čłąĖąĮąĄ ModBus čāąČąĄ ąĄčüčéčī, ą┐ąŠčĆą░ ąĘą░ą┐ąĖą╗ąĖčéčī master-device.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ąĮąŠčÅ 25, 2022 19:39:04
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
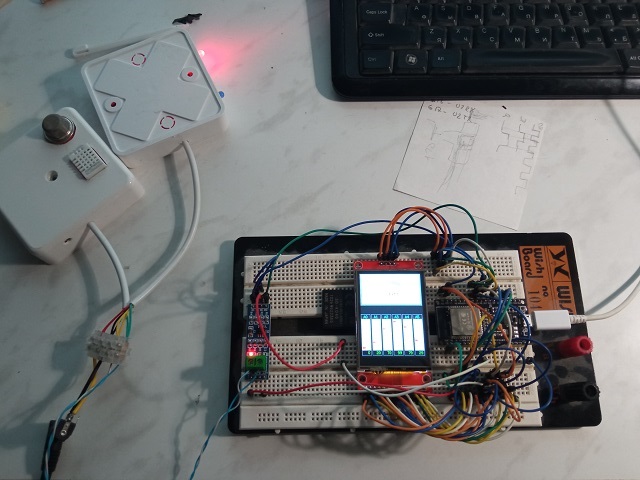
ąÆčüąĄą╝ ą┐čĆąĖą▓ąĄčé! ą¤ąŠą║ą░ č鹊 ą┤ą░ čüčæ, ąĘą░ą╝ą░ą║ąĄčéąĖčĆąŠą▓ą░ą╗ master-device.
ąŚą░ą┤ą░čćąĖ ą▓ąŠąĘą╗ą░ą│ą░čÄčéčüčÅ ąĮą░ ąĮąĄą│ąŠ čüą╗ąĄą┤čāčÄčēąĖąĄ:
1 ą×ą┐čĆąŠčü ą▓čüąĄčģ ąĮąĄą╝čŗčüą╗ąĖą╝čŗčģ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ ąĖ čüąĄčĆą▓ąĖčüąĮčŗčģ ą┤ą░čéčćąĖą║ąŠą▓.
2 ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤ą░ąĮąĮčŗčģ, ąĘą░ą┐ąĖčüčī ąĮą░ čäą╗ąĄčł ąĖčüč鹊čĆąĖč湥čüą║ąĖčģ čüąŠą▒čŗčéąĖą╣ (log).
3 ążčāąĮą║čåąĖčÅ ą░ą▓č鹊ą┐ąĖą╗ąŠčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓ą░čģč鹥ąĮąĮąŠą╝čā 菹║ąĖą┐ą░ąČčā
4 ą×čģčĆą░ąĮąĮą░čÅ čäčāąĮą║čåąĖčÅ (GSM SIM800L)+LORA
5 ąōčĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü
6 WEB čüąĄčĆą▓ąĄčĆ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ čü č鹥ą╗ąĄč乊ąĮą░.
7 ąĢčēąĄ ąĮąĄ ą┐čĆąĖą┤čāą╝ą░ą╗....
ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ESP32. ąŚą░ą┤ą░čćąĖ ą▒čāą┤čā čĆą░čüą┐ą░čĆą░ą╗ą╗ąĄą╗ąĖą▓ą░čéčī, ą░ čŹč鹊 ąĘąĮą░čćąĖčé ą┐čĆąĖą▓ąĄčé ą╝čīčÄč鹥ą║čüą░ą╝, čéą░čüą║ą░ą╝ ąĖ čüąĄą╝ą░č乊čĆą░ą╝
ąØą░ą┤ąĄčÄčüčī ąĄą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ čģą▓ą░čéąĖčé.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ąĮąŠčÅ 26, 2022 13:21:13
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąØąŠčćčī ą┐čĆąŠčłą╗ą░ čĆąĄąĘčāą╗čīčéą░čéąĖą▓ąĮąŠ
ąśąĘčāčćą░ą╗ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠą┤ą▓ąĖąĮčāč鹊ą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤ą╗čÅ ModBus RTU ąŠčéčüčÄą┤ą░
https://github.com/emelianov/modbus-esp8266 ąØąĄ ą▓čüąĄ ą┐ąŠąĮčÅčéąĮąŠ čü ąĖčģ ą░čüąĖąĮčģčĆąŠąĮčēąĖąĮąŠą╣, ąĖ ąĮąĄčé ą┐ąŠą║ą░ čāą▓ąĄčĆąĄąĮąĮąŠčüčéąĖ čćč鹊 ą▓čüąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ąŠąĮčÅą╗ čćč鹊 ą┐ąŠąĮčÅą╗ (ą║ą░ą╗ą░ą╝ą▒čāčĆčćąĖą║)
ąØąŠ ą┤ą░čéčćąĖą║ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠ ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ. ą×čłąĖą▒ąŠą║ čćč鹥ąĮąĖčÅ ąĮąĄčé
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
#include <Arduino.h>
ąĪąĄą╣čćą░čü ą┐ąŠą║ą░ ąĮą░ čäąĖčłą║ąĖ RTOS ąĘą░ą╝ąŠčĆą░čćąĖą▓ą░čéčīčüčÅ ąĮąĄ ą▒čāą┤čā. ą¤ąŠč鹊ą╝čā čćč鹊 ą┤ą░čéčćąĖą║ąŠą▓ ą▒čāą┤ąĄčé ą╝ąĮąŠą│ąŠ, ąĖ ąĮąĄ čĆąĄčłąĖą╗ ą║ą░ą║ąĖąĄ ąĖ čü ą║ą░ą║ąŠą╣ čćą░čüč鹊č鹊ą╣ ąĮčāąČąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčī.
ąØą░ Core1 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čāčüčéčī čĆčāčéąĖąĮą░ ą╝ąŠą╗ąŠčéąĖčé... ą░ čéą░ą╝ ą┐ąŠčüą╝ąŠčéčĆąĖą╝
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
roman.com
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ąĮąŠčÅ 26, 2022 16:23:13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6885ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
6 WEB čüąĄčĆą▓ąĄčĆ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ čü č鹥ą╗ąĄč乊ąĮą░.
WEB čüąĄčĆą▓ąĄčĆ ? čéčŗ čćč鹊 ! čģąŠč湥čłčī čćč鹊ą▒ čéą▓ąŠčÄ čüąĖčüč鹥ą╝čā ą▓ąĘą╗ąŠą╝ą░ą╗ąĖ ?
ą╗čÄą▒ąŠą╣ čłą║ąŠą╗čīąĮąĖą║...
ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┐čĆąŠčüč鹊ą╣ IP čüą║ą░ąĮąĄčĆ...
ąÆą╗ąŠąČąĄąĮąĖąĄ:
1.jpg [85.29 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 56
ąĖ čüą║ą░ąĮąĄčĆ ą┐ąŠčĆč鹊ą▓...
ąÆą╗ąŠąČąĄąĮąĖąĄ:
2.jpg [85.8 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 56
ą┐ąŠą┤ą║ą╗čÄčćąĖčéčüčÅ ą║ čéą▓ąŠąĄą╝čā WEB čüąĄčĆą▓ąĄčĆčā...
ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą▒čĆą░čāąĘąĄčĆ_1.jpg [179.81 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 51
ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čüąĮąĖčäč乥čĆą░ ą┐čĆąĖčćąĖčéą░ąĄčé ą▓čüąĄ čéą▓ąŠąĖ ą╗ąŠą│ąĖąĮčŗ ąĖ ą┐ą░čĆąŠą╗ąĖ))
ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą░ąĮą░ą╗ąĖąĘą░č鹊čĆ_1.jpg [161.67 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 55
ąĖą╗ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čéčĆąŠčÅąĮą░ čāą║čĆą░ą┤čæčé ą▓čüąĄ čéą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ WEB čüąĄčĆą▓ąĄčĆ čü č鹥ą╗ąĄč乊ąĮą░... (ą▒čĆą░čāąĘąĄčĆ čüąŠčģčĆą░ąĮčÅąĄčé ą▓čüąĄ ą╗ąŠą│ąĖąĮčŗ... ą┐ą░čĆąŠą╗ąĖ... ą║čāą║ąĖ... ą║ą╗čÄčćąĖ čłąĖčäčĆąŠą▓ą░ąĮąĖčÅ ą▓čüąĄčģ WEB čüąĄčĆą▓ąĄčĆąŠą▓ ą║ ą║ąŠč鹊čĆąŠą╝ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ č鹥ą╗ąĄč乊ąĮ).
ą┐ąŠčŹč鹊ą╝čā ąĮąĖą║ą░ą║ąĖčģ WEB čüąĄčĆą▓ąĄčĆąŠą▓ ! ))
ą┐ąĖčłąĄą╝ čüą▓ąŠčæ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮą░ č鹥ą╗ąĄč乊ąĮąĄ... čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ UDP... ą┤ą╗čÅ ąĘą░čēąĖčéčŗ ąŠčé ą╗čÄą▒čŗčģ čüą║ą░ąĮąĄčĆąŠą▓))
UDP čüąĄčĆą▓ąĄčĆ ąĮąĖ ąŠą┤ąĖąĮ čüą║ą░ąĮąĄčĆ ąĮąĄ ąĮą░ą╣ą┤čæčé ! ))
ąÆą╗ąŠąČąĄąĮąĖąĄ:
ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą┐čāą╗čīčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.jpg [96.76 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 49
ąĖ čé.ą┤.
ą┐čĆąĖ čŹč鹊ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮą░ č鹥ą╗ąĄč乊ąĮąĄ ąØąĢ čüąŠčģčĆą░ąĮčÅąĄčé ą▓čüąĄ ą╗ąŠą│ąĖąĮčŗ... ą┐ą░čĆąŠą╗ąĖ... ą║čāą║ąĖ... ą║ą╗čÄčćąĖ čłąĖčäčĆąŠą▓ą░ąĮąĖčÅ.
ą▓čüčæ čŹč鹊 ąĘą░čłąĖč鹊 ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ... ąŠčéą║čāą┤ą░ ą┤ąŠčüčéą░čéčī čŹč鹊 ąĮąĄ čéą░ą║ č鹊 ąĖ ą┐čĆąŠčüč鹊))
ą▓ ąŠčéą╗ąĖčćąĖąĖ ąŠčé ą▒čĆą░čāąĘąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ čģčĆą░ąĮąĖčé čŹč鹊 ą▓čüčæ ą▓ č鹥ą╗ąĄč乊ąĮąĄ, ą▓ ąŠčéą┤ąĄą╗čīąĮąŠą╝ čäą░ą╣ą╗ąĄ, ą▓ ąŠčéą║čĆčŗč鹊ą╝ ą▓ąĖą┤ąĄ ! ))
ąśąĘčāčćą░ą╗ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠą┤ą▓ąĖąĮčāč鹊ą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤ą╗čÅ ModBus RTU
ModBus čÅ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄ... čā ą╝ąĄąĮčÅ ąĄčüčéčī Ethernet čü PoE ))
ąÆą╗ąŠąČąĄąĮąĖąĄ:
čüčģąĄą╝ą░_1.jpg [196.87 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 53
-ą▓ąŠ ą┐ąĄčĆą▓čŗčģ ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą▒čŗčüčéčĆąĄą╣ (10 ą╝ą▒ąĖčé/c ą┐čĆąŠčéąĖą▓ ModBus 115200)...
-ą▓ąŠ ą▓č鹊čĆčŗčģ PoE ąĖąĘą▒ą░ą▓ą╗čÅąĄčé ą╝ąĄąĮčÅ ąŠčé ą┐čĆąŠčéčÅą│ąĖą▓ą░ąĮąĖčÅ ą╗ąĖčłąĮąĖčģ ą┐čĆąŠą▓ąŠą┤ąŠą▓...
-ą▓ čéčĆąĄčéčīąĖčģ ą▒ąŠą╗ąĄąĄ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮą░čÅ čüčģąĄą╝ą░ (ąĮąĄ ąĮčāąČąĮčŗ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ąĖ ModBus <> Ethernet, ModBus <> Wi-Fi ąĖ čé.ą┤.)
ąĖ čé.ą┤.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
maxlab
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ąĮąŠčÅ 26, 2022 21:46:29
ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą┐čĆ 23, 2013 22:21:18ąĪąŠąŠą▒čēąĄąĮąĖą╣: 377ą×čéą║čāą┤ą░: KUBAN, Krasnodar
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
roman.com ąöą░ ąĮčā...ąĮą░čģąĄčĆ...
ą¦č鹊 č鹊 ą▓ ą╝ąŠčĆąĄ čÅ ąĮąĄ ą▓ąĖą┤ąĄą╗ čłą║ąŠą╗čīąĮąĖą║ąŠą▓ čü ąĮąŠčāčéą░ą╝ąĖ ąĖ čü ą▓ąĄčüą╗ą░ą╝ąĖ ąĮą░ą┐ąĄčĆąĄą▓ąĄčü.
ąóąŠ, ąŠ č湥ą╝ čéčŗ ą│ąŠą▓ąŠčĆąĖčłčī, ąĖą╝ąĄąĄčé ą╝ąĄčüč鹊 ą▓ ąŠą▒čŗčćąĮąŠą╣ ąČąĖąĘąĮąĖ ąŠą▒čŗą▓ą░č鹥ą╗čÅ. ąØąŠ ą║ąŠą│ą┤ą░ čéčŗ ąŠčé ą▒ąĄčĆąĄą│ą░ ąŠčéą▓ą░ą╗ąĖčłčī čģąŠčéčÅ ą▒čŗ ąĮą░ ą┐ą░čĆčā ą╝ąĖą╗čī, ąČąĖąĘąĮčī ąĮą░čćąĖąĮą░ąĄčé ąĖą│čĆą░čéčī ą┤čĆčāą│ąĖą╝ąĖ ą║čĆą░čüą║ą░ą╝ąĖ.
WEB čüąĄčĆą▓ąĄčĆ, ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖ ą▒ąĄąĘ ą┤ąŠčüčéčāą┐ą░ ą║ WAN. ą» ą┐ąŠąĮąĖą╝ą░čÄ čćč鹊 ą╝ąŠąČąĮąŠ ą┤ą╗čÅ č鹥ą╗ąĄč乊ąĮą░ ąĮą░ą┐ąĖčüą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī TCP čüąŠą║ąĄčéčŗ. ąØąŠ čŹč鹊 ą▓čüąĄ čüą╗ąŠąČąĮąŠ ąĖ
ą▓čĆąĄą╝čÅ-ąĘą░čéčĆą░čéąĮąŠ. ą¤ąŠčŹč鹊ą╝čā ą┐ą░čĆą░ čéčĆąŠą╣ą║ą░ čüčéčĆą░ąĮąĖčå HTML&CSS&JS ą▓ čĆą░ą╝ą║ą░čģ ą▓ąĄą▒ čüąĄčĆą▓ąĄčĆą░ ąĮą░ esp32 - čŹč鹊 ą▒čŗčüčéčĆąŠ ąĖ ą┤ąĄčłąĄą▓ąŠ. ą£ąŠčēąĮąŠčüčéčī wi-fi ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ą╝ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐čĆąĖčéčāčłąĖčéčī,
čćč鹊ą▒čŗ čā ą▒ąŠčéą░ąĮąŠą▓ ąŠčé IT ąĮąĄ ą▓ąŠąĘą▒čāąČą┤ą░čéčī ąĮąĄ ąĘą┤ąŠčĆąŠą▓ąŠąĄ ą╗čÄą▒ąŠą┐čŗčéčüčéą▓ąŠ ą║ąŠą│ą┤ą░ ąĮą░ čüč鹊čÅąĮą║ąĄ ąĖą╗ąĖ ą▒ą╗ąĖąĘą║ąŠ ą║ ą▒ąĄčĆąĄą│čā. ąöą░ ąĖ ą║ąŠą│ą┤ą░ čüč鹊ąĖčłčī čŹč鹊 ą▓čüąĄ ąŠą▒ąĄčüč鹊č湥ąĮąŠ ą║čĆąŠą╝ąĄ ą┐ąŠąČą░čĆąĮąŠą╣ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ.
ą¤ąŠ ą┐ąŠą▓ąŠą┤čā ModBus. ąŁč鹊 ą┐čĆąŠčüč鹊 ąĖ ąĮą░ą┤ąĄąČąĮąŠ. ąÆąĖą┤ąĄąŠą┐ąŠč鹊ą║ ą╝ąĮąĄ ą│ąŠąĮčÅčéčī ąĮąĄ ąĮčāąČąĮąŠ, ą░ čü ąĘą░ą┤ą░čćą░ą╝ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĖ ą┐ąĖą╗ąŠčéąĖčĆąŠą▓ą░ąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ ąĖ ą▓ 38400 ąĘą░ ą│ą╗ą░ąĘą░ čģą▓ą░čéąĖčé. ą¤ą░čĆčāčüąĮą░čÅ ą╗ąŠą┤ą║ą░ čéą░ą║ąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ą║ą░ą║ čÅ čüčéčĆąŠčÄ,
čģąŠą┤ąĖčé ąĮąĄ ą▒čŗčüčéčĆąĄąĄ ą▓ąĄą╗ąŠčüąĖą┐ąĄą┤ą░. ąó.ąĄ. 20 ą║ą╝/čć ą┤ą╗čÅ ąĮąĄąĄ ąĮąĄą┤ąŠčüčéąĖąČąĖą╝čŗą╣ ą┐ąŠč鹊ą╗ąŠą║. ąŁč鹊 ą▓ąŠą┤ąŠąĖąĘą╝ąĄčēą░čÄčēąĄąĄ ą┐ą╗ą░ą▓ą░ąĮąĖąĄ ą░ ąĮąĄ ą│ą╗ąĖčüčüąĖčĆąŠą▓ą░ąĮąĖąĄ. ąźąŠčéčÅ, čéčāčé ą║ąŠą╗ą╗ąĄą│ąĖ ą╝ąĄąĮčÅ čāąČąĄ ą┐ąŠčćčéąĖ ą┐ąĄčĆąĄčāą▒ąĄą┤ąĖą╗ąĖ ą┐ąĄčĆąĄčüąĄčüčéčī ąĮą░ CAN čłąĖąĮčā.
ą¤ąŠč鹊ą╝čā čćč鹊 č鹊ą│ą┤ą░ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ąĮą░čĆą░čēąĖą▓ą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄą╝ Raymarine ąĖą╗ąĖ B&G ąĮą░ą┐čĆąĖą╝ąĄčĆ. ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüčéą░ą▓čēąĖą║ąĖ ą╝ąŠčĆčüą║ąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ čāąČąĄ č鹊ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé
Ethernet ą▓ ą║ą░č湥čüčéą▓ąĄ čłąĖąĮčŗ. ąØąŠ ą░čüčüąŠčåąĖą░čåąĖąĄą╣ NMEA čŹč鹊 ąĄčēąĄ ąĮąĄ čüčéą░ąĮą┤ą░čĆčéąĖąĘąĖčĆąŠą▓ą░ąĮąŠ ąĖ ąĮąĄ čüąĄčĆčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąŠ. ąŁč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ OneNet. ąÜčüčéą░čéąĖ, ą║č鹊 č鹊 ą╝ąĮąĄ čĆą░čüčüą║ą░ąĘčŗą▓ą░ą╗ čćč鹊 ąĮą░ ąĮą░čłąĖčģ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ čüčāą▒ą╝ą░čĆąĖąĮą░čģ čāąČąĄ
ąĮą░ ą▓čüčÄ ą║ą░čéčāčłą║čā ąŠą┐čéąĖą║čā čĹʹ░čÄčé.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
roman.com
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 27, 2022 01:42:31
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6885ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąŠčēąĮąŠčüčéčī wi-fi ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ą╝ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐čĆąĖčéčāčłąĖčéčī,
ą│čāą╗čÅčÄčé čüąĄą▒ąĄ ą╗čÄą┤ąĖ... čü č鹥ą╗ąĄč乊ąĮą░ą╝ąĖ čü Wi-Fi...
ą░ čéčāčé čüč鹊ąĖčé ą╗ąŠą┤ą║ą░.. .čü ą▒ąĄčüą┐ą╗ą░čéąĮčŗą╝ Wi-Fi ! ))
ąÆą╗ąŠąČąĄąĮąĖąĄ:
1.jpg [85.74 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 40
ą× ! ą▒ąĄčüą┐ą╗ą░čéąĮčŗą╣ Wi-Fi ! )) ąĮą░ą┤ąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčüčÅ))
ąÜą░ąČą┤čŗą╣ čĆą░ąĘ čéčāčłąĖčéčī ą£ąŠčēąĮąŠčüčéčī wi-fi ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░... čćč鹊ą▒ ąĮąĄą╗čīąĘčÅ ą▒čŗą╗ąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ... čŹč鹊 ąĮąĄ čüąĄčĆčīčæąĘąĮąŠ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
Martian
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 27, 2022 02:18:52
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 29
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1319
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą┤ąĄą║ 18, 2021 19:25:32ąĪąŠąŠą▒čēąĄąĮąĖą╣: 10512
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: -2
roman.com , ąĄčüą╗ąĖ čüčāą╝ąĄąĄč鹥 ą▓ąĘą╗ąŠą╝ą░čéčī ą╝ąŠą╣ ą▓ąĄą▒-čüąĄčĆą▓ąĄčĆ č湥čĆąĄąĘ ą▓ą░ą╣-čäą░ą╣, ą┤ą░ą╝ čłąŠą║ąŠą╗ą░ą┤ą║čā. ąØąŠ ą▓čĆčÅą┤-ą╗ąĖ. ,ą¤ąŠč鹊ą╝čā čćč鹊 čüąĮąĖčäč乥čĆ, čéčĆąŠčÅąĮčŗ... čā ąÆą░čü ą▒ąŠą│ą░čéčŗą╣ ąĮą░ą▒ąŠčĆ čüą╗ąŠą▓ ąĖ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąŠčéčüčāčéčüčéą▓čāąĄčé ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░. ąś ąĄčēčæ: UDP čüą║ą░ąĮąĖčĆčāąĄčéčüčÅ.
ą┤ąŠą▒ą░ą▓čī radiokot.ru##.tablebg > tbody > tr:has(td>a[href*="?f=17"]) ą▓ ą░ą┤ą▒ą╗ąŠą║, čüą┤ąĄą╗ą░ą╣ č乊čĆčāą╝ čćąĖčēąĄ! "ąŁ-čŹ-čŹ-čģąĄą╣... čĆą░čüčéčæčé ą┐čĆą░ą▓ąŠčüąŠąĘąĮą░ąĮąĖąĄ!"
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
roman.com
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąóąĄčģąĮąŠčÅčģčéąĖąĮą│ čü ąÉčĆą┤čāąĖąĮąŠ
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 27, 2022 12:10:56
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6885ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
UDP čüą║ą░ąĮąĖčĆčāąĄčéčüčÅ.
č湥ą╝ ? ą┐čĆąĖą▓ąĄą┤ąĖč鹥 čģąŠčéčī ąŠą┤ąĖąĮ ą┐čĆąĖą╝ąĄčĆ...
ąĖą╗ąĖ ąŠą┐čÅčéčī ą┐čāčüčéą░čÅ ą▒ąŠą╗č鹊ą╗ąŠą│ąĖčÅ ? ))
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĪčéčĆą░ąĮąĖčåą░ 3 ąĖąĘ 4
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 79 ]
, , ,
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 9
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ