|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 3 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 71 ] |
, , , |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
a797945

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąŠą║čé 17, 2021 08:25:54 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 80
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ąĮąŠčÅ 01, 2015 09:15:16
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ą×čéą║čāą┤ą░: 69.ąĀąČąĄą▓
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĢčüą╗ąĖ čćč鹊 - čÅ ąĮąĖą║ąŠą│ąŠ ąĮąĖ ą║ č湥ą╝čā ąĮąĄ ą┐čĆąĖąĘčŗą▓ą░čÄ.  ą¤čĆąŠčüč鹊 ą▓čüą┐ąŠą╝ąĮąĖą╗ ąĖ ąĮą░ą┐ąĖčüą░ą╗ - ą║ą░ą║ ą║ąŠą│ą┤ą░-č鹊 čĆąĄčłąĖą╗ ą┐čĆąŠą▒ą╗ąĄą╝čā ą▒čŗčüč鹊čĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąŠą┐čĆąŠčüą░ 菹Įą║ąŠą┤ąĄčĆą░ ąĖ ą┐čĆąĖ čŹč鹊ą╝ ąĄčēąĄ ą┐ąŠą╗čāčćąĖą╗ čŹčĆą│ąŠąĮąŠą╝ąĖą║čā, ą║ą░ą║čāčÄ čģąŠč鹥ą╗. ąöą░ą▓ąĮąŠ ą┤ąĄą╗ąŠ ą▒čŗą╗ąŠ ąĖ ą▒čŗą╗ąŠ ąĮą░ avr.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
auric
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąŠą║čé 18, 2021 19:26:06 |
|
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 0
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą░ą┐čĆ 17, 2019 12:04:23
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 75
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĖ čéčāčé ąĮą░ č鹥ą▒ąĄ - ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüčćąĖčéą░ąĄčé ąĖą╝ą┐čāą╗čīčüčŗ - ą░ ą┤ąŠą╗ąČąĄąĮ ąŠą┤ąĖąĮ ą┤ąŠą▒ą░ą▓ąĖčéčī ąĖ čéčāčé ąČąĄ ą┐ąŠ čüą┐ą░ą┤čā čāą▒ą░ą▓ąĖčéčī. ąŚąĮą░čćąĖčé, čā č鹥ą▒čÅ čéą░ą╣ą╝ąĄčĆ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░čüčéčĆąŠąĄąĮ. ąó.ą║. ą▓ čéą░ą║ąŠą╣ čüąĖčéčāą░čåąĖąĖ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčüč鹊 ąĮą░ ┬▒1 ą┤čĆąŠąČą░čéčī! ą» ą▓ čŹčéąĖčģ ą▓ą░čłąĖčģ ą║ą░ą╗ąŠą║čāą▒ą░čģ ąĮąĄ ą┐ąŠąĮąĖą╝ą░čÄ. ą¤ąŠčŹč鹊ą╝čā ą▓ ą║ąŠą┤ ąĖ ąĮąĄ čüą╝ąŠčéčĆčÄ. ąØčā ąĖ ą┤ą░: ą║č鹊 čüą║ą░ąĘą░ą╗, čćč鹊 ą▓ čüą░ą╝ąŠą╝ ą║ą░ą╗ąŠą║čāą▒ąĄ ąĮąĄčé ąŠčłąĖą▒ąŠą║? ą¤čĆąĖą▓ąŠąČčā ą║ąŠą┤ ąĖąĘ čüąĮąĖą┐ą┐ąĄčéą░: ąÜąŠą┤: static inline void timers_setup(){
RCC->APB1ENR |= RCC_APB1ENR_TIM3EN;
/* (1) Configure TI1FP1 on TI1 (CC1S = 01)
configure TI1FP2 on TI2 (CC2S = 01) */
/* (2) Configure TI1FP1 and TI1FP2 non inverted (CC1P = CC2P = 0, reset value) */
/* (3) Configure both inputs are active on both rising and falling edges
(SMS = 011), set external trigger filter to f_DTS/8, N=6 (ETF=1000) */
/* (4) Enable the counter by writing CEN=1 in the TIMx_CR1 register. */
TIM3->CCMR1 = TIM_CCMR1_CC1S_0 | TIM_CCMR1_CC2S_0; /* (1)*/
/* (2) */
TIM3->SMCR = TIM_SMCR_ETF_3 | TIM_SMCR_SMS_0 | TIM_SMCR_SMS_1; /* (3) */
// enable update interrupt
TIM3->DIER = TIM_DIER_UIE;
// set ARR to 79 - generate interrupt each 80 counts (one revolution)
TIM3->ARR = 79;
// enable timer
TIM3->CR1 = TIM_CR1_CEN; /* (4) */
NVIC_EnableIRQ(TIM3_IRQn);
} ążąĖą╗čīčéčĆą░čåąĖčÅ ąĮą░čüčéčĆąŠąĄąĮą░? čģąŠčćčā ą┐ąŠąŠą▒čüčāąČą┤ą░čéčī ą┤ą░ąĮąĮčŗą╣ ą║ąŠą┤ ą▓ čĆą░ąĘčĆąĄąĘąĄ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ ąĖą╝ąĄąĮąĮąŠ čŹč鹊ą│ąŠ čäąĖą╗čīčéčĆą░ ETF ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ 菹Įą║ąŠą┤ąĄčĆą░, ą║č鹊 čćč鹊 ą┤čāą╝ą░ąĄčé, čÅ ą╗ąĖčćąĮąŠ čüčćąĖčéą░čÄ, čćč鹊 ąĮą░čüčéčĆąŠą╣ą║ą░ čĆąĄą│ąĖčüčéčĆą░ TIM3->SMCR ą┐čĆąĖą▓čÅąĘą░ąĮą░ ą║ External čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÄ, čüąŠą▒čüčéą▓ąĄąĮąĮąŠ čü čŹčéąĖą╝ čüąĖą│ąĮą░ą╗ąŠą╝ čäąĖą╗čīčéčĆ ąĖ čĆą░ą▒ąŠčéą░ąĄčé, ą░ čéą░ą║ąČąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąĮą░ ąĮąĄą│ąŠ ą┤ąĄą╣čüčéą▓čāąĄčé. ą¤ąŠ ąĖą┤ąĄąĄ čü 菹Įą║ąŠą┤ąĄčĆąĮčŗą╝ąĖ ą▓čģąŠą┤ą░ą╝ąĖ ą┤ąŠą╗ąČąĮčŗ čĆą░ą▒ąŠčéą░čéčī čĆąĄą│ąĖčüčéčĆčŗ CCMR1(2) ą▓ čĆąĄąČąĖą╝ąĄ ąĖąĮą┐čāčé ą┐ąĖąĮąŠą▓ (ą║ą░ąĮą░ą╗ąŠą▓ ą║ą░ą║ ą▓čģąŠą┤ąŠą▓). ąŚą░č鹥ą╝ ą┐ąŠčüą╗ąĄ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠą╗čāčćą░čéčīčüčÅ TI1FP1 ąĖ TI1FP2, ą║ąŠč鹊čĆčŗąĄ ąĖ čÅą▓ą╗čÅčÄčéčüčÅ čéą░ą║čéąĖčĆčāčÄčēąĖą╝ąĖ. ąÆąŠčé č鹊ą╗čīą║ąŠ ąĮąĄ ą┐ąŠą╣ą╝čā, ą║ą░ą║ ą▓ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ ą┤ąŠą╗ąČąĄąĮ čĆą░ą▒ąŠčéą░čéčī ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čüčāą┤čÅ ą┐ąŠ čéą░ą║ąŠą╣ ą║ą░čĆčéąĖąĮą║ąĄ 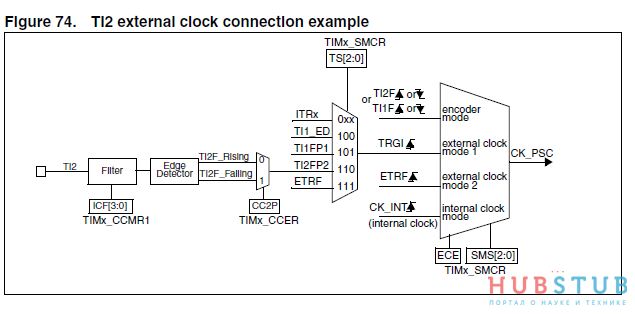 ą┐ąĄčĆą▓čŗą╝ čĆą░ą▒ąŠčéą░ąĄčé čäąĖą╗čīčéčĆ ą▓čŗą▒ąŠčĆąŠą║, ąĮąŠ ąĮąĄ čüąŠą▓čüąĄą╝ ą┐ąŠąĮčÅčéąĮąŠ, ą║ą░ą║ ąĘą┤ąĄčüčī čāčćą░čüčéą▓čāąĄčé ą┐čĆąĄčüą║ą░ą╗ąĄčĆ, čģąŠčĆąŠčłąŠ, ąĄčüą╗ąĖ ą┤ąĄą╗ąĖčé čćą░čüč鹊čéčā čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠ čłąĖąĮąĄ ąĖ ąĘą░ą┤ą░ąĄčé čŹč鹊čé f_TDS ąĮą░ ą▓čŗą▒ąŠčĆą║ąĖ, ą░ ą╝ąŠąČąĄčé ą▓ąŠąŠą▒čēąĄ ąĮąĄ ą┤ąĄą╗ąĖčé. ąöą░ą╗ąĄąĄ ą▓čŗą▒ąŠčĆ čäčĆąŠąĮčéą░ ąĖą╗ąĖ čüą┐ą░ą┤ą░ (ą║čüčéą░čéąĖ ą▓ CIMSIS ąĄčüčéčī TIM_ICPolarity_BothEdge, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠ čüčāčéąĖ čā ą╝ąĄąĮčÅ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čüąĖą╗čā ąŠčéčüčāčéčüčéą▓ąĖčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ). ą¤ąŠč湥ą╝čā ąĘą░ą┤čāą╝ą░ą╗čüčÅ, ą┤ą░ ą┐ąŠč鹊ą╝čā čćč鹊 ą┤čĆąĄą▒ąĄąĘą│ čÅ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī čĆą░čüč湥čéąĮčŗą╝ ą┐čāč鹥ą╝ ąĮąĄ čüą╝ąŠą│, čģąŠč鹥ą╗ ąŠą│čĆą░ąĮąĖčćąĖčéčī čćą░čüč鹊č鹊ą╣ 70ą║ąōčå, ą░ ą▓ ąĖč鹊ą│ąĄ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╗ąŠą▓ą╗čÄ ą┤ą░ąČąĄ ąĮąĄ ą┤ąŠčüčćąĖčéą░ą▓ ąÜąŠą┤: if (CNT_EN){
if ((CNT_TIM3_old==1)&&(cnt_dir!=1)&&(TIM3_CNT > 32767))
CNT_Val_Reg = (s32)(CNT_Val_Reg - 65536), CNT_TIM3_old = 65534, cnt_dir = 1;
if ((CNT_TIM3_old==65534)&&(cnt_dir!=2)&&(TIM3_CNT < 32767))
CNT_Val_Reg = (s32)(CNT_Val_Reg + 65536), CNT_TIM3_old = 1, cnt_dir = 2;
} ąĖ čŹč鹊 ąĮą░ 72 ą£ąōčå čćą░čüč鹊č鹥. ąźąŠčéčÅ ąĮą░čüčéčĆąŠą╣ą║čā ąĮą░ ETF č鹊ąČąĄ ą┤ąĄą╗ą░čÄ ąĖąĘ čüąŠąŠą▒čĆą░ąČąĄąĮąĖą╣ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠčüčéąĖ ąĖ ąŠą▒čŗą║ąĮąŠą▓ąĄąĮąĮąŠą│ąŠ ą╝ą░čĆą░ąĘą╝ą░. ą¤čŗąĪčŗ: ą║ąŠčĆąŠč湥 ICPrescaler ą▓ąŠąŠą▒čēąĄ čāą▒čĆą░ą╗ ąŠčé ą│čĆąĄčģą░, CKD ą▓ čĆąĄą│ąĖčüčéčĆąĄ SR1 čüą┤ąĄą╗ą░ą╗ čüą▓ąŠąĄ ą┤ąĄą╗ąŠ. ąÜąŠą┤: TIM_ICInitTypeDef TIM_ICInitStructure;
//Enter the content in the structure by default
TIM_ICStructInit(&TIM_ICInitStructure);
//ą▓čŗą▒čĆą░čéčī ą▓čģąŠą┤ąĮąŠą╣ č鹥čĆą╝ąĖąĮą░ą╗ IC1
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
//ąŚą░čģą▓ą░čé čäčĆąŠąĮčé
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
//čüąŠą┐ąŠčüčéą░ą▓ą╗ąĄąĮ čü TI1
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
//ąØą░čüčéčĆąŠąĖčéčī ą▓čģąŠą┤ąĮąŠąĄ čćą░čüč鹊čéąĮąŠąĄ ą┤ąĄą╗ąĄąĮąĖąĄ ąĘą░ą╝ąĄčĆčÅąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ąĮąĄ ą┤ąĄą╗ąĖą╝ čćč鹊ą▒ ąĮąĄ ą┐ąŠč鹥čĆčÅčéčī
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
//filter value fSAMPLING=fDTS/32, ą▓čŗą▒ąŠčĆą║ą░ N=8.
TIM_ICInitStructure.TIM_ICFilter = 15;
//Initialize the specified parameters in TIM_ICInitStructure TIM3
TIM_ICInit(TIM3, &TIM_ICInitStructure);
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
tonyk
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 07:59:37 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
ąÜą░čĆą╝ą░: -4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 19, 2019 06:10:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1055
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą”ąĖčéą░čéą░: ą┤ą░ ą┐ąŠč鹊ą╝čā čćč鹊 ą┤čĆąĄą▒ąĄąĘą│ čÅ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī čĆą░čüč湥čéąĮčŗą╝ ą┐čāč鹥ą╝ ąĮąĄ čüą╝ąŠą│ ąÉ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĄą│ąŠ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乊ą╝, ąĖąĘą╝ąĄčĆąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī čü ą┐ąŠą╝ąŠčēčīčÄ RC-čäąĖą╗čīčéčĆą░ ąĖ čéčĆąĖą│ą│ąĄčĆą░ ą©ą╝ąĖčéčéą░ ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗? ąōą╗čÅą┤čÅ ąĮą░ čüčéčĆčāą║čéčāčĆčā čéą░ą╣ą╝ąĄčĆą░, čÅ ąĮąĄ ą▓ąĖąČčā čéą░ą╝ ąĮą░čüč鹊čÅčēąĄą│ąŠ čäąĖą╗čīčéčĆą░ ą┤čĆąĄą▒ąĄąĘą│ą░, ą┐ąŠčŹč鹊ą╝čā, ąśą£ąźą×, čéą▓ąŠąĖ ą┐ąŠą┐čŗčéą║ąĖ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī ą┤čĆąĄą▒ąĄąĘą│ ą▒čŗą╗ąĖ ą░ą┐čĆąĖąŠčĆąĖ ąŠą▒čĆąĄč湥ąĮčŗ ąĮą░ ąĮąĄčāą┤ą░čćčā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 09:50:53 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą¤ąŠ čŹč鹊ą╣ SPL'ąĮąŠą╣ ą╝ąĄčłą░ąĮąĖąĮąĄ ą▓ąŠąŠą▒čēąĄ ąĮąĄą┐ąŠąĮčÅčéąĮąŠ, čćč鹊 čéą░ą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé. ąØąŠ čćč鹊-č鹊 ąŠč湥ąĮčī ą┐ąŠčģąŠąČąĄ, čćč鹊 čéą░ą╣ą╝ąĄčĆ ą▓ąŠąŠą▒čēąĄ ąĮąĄ ą▓ čĆąĄąČąĖą╝ąĄ 菹Įą║ąŠą┤ąĄčĆą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ, ą░ ą▓ čéčāą┐ąŠą╝ čĆąĄąČąĖą╝ąĄ čüč湥čéą░ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą║ą░ąĮą░ą╗čā!
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
auric
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 10:50:25 |
|
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 0
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą░ą┐čĆ 17, 2019 12:04:23
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 75
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą”ąĖčéą░čéą░: ą┤ą░ ą┐ąŠč鹊ą╝čā čćč鹊 ą┤čĆąĄą▒ąĄąĘą│ čÅ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī čĆą░čüč湥čéąĮčŗą╝ ą┐čāč鹥ą╝ ąĮąĄ čüą╝ąŠą│ ąÉ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĄą│ąŠ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乊ą╝, ąĖąĘą╝ąĄčĆąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī čü ą┐ąŠą╝ąŠčēčīčÄ RC-čäąĖą╗čīčéčĆą░ ąĖ čéčĆąĖą│ą│ąĄčĆą░ ą©ą╝ąĖčéčéą░ ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗? ąōą╗čÅą┤čÅ ąĮą░ čüčéčĆčāą║čéčāčĆčā čéą░ą╣ą╝ąĄčĆą░, čÅ ąĮąĄ ą▓ąĖąČčā čéą░ą╝ ąĮą░čüč鹊čÅčēąĄą│ąŠ čäąĖą╗čīčéčĆą░ ą┤čĆąĄą▒ąĄąĘą│ą░, ą┐ąŠčŹč鹊ą╝čā, ąśą£ąźą×, čéą▓ąŠąĖ ą┐ąŠą┐čŗčéą║ąĖ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī ą┤čĆąĄą▒ąĄąĘą│ ą▒čŗą╗ąĖ ą░ą┐čĆąĖąŠčĆąĖ ąŠą▒čĆąĄč湥ąĮčŗ ąĮą░ ąĮąĄčāą┤ą░čćčā. ąØčā čüąĄą╣čćą░čü ą┐ąŠą╗čāčćąĖą╗ąŠčüčī, ą┤čĆąĄą▒ąĄąĘą│ ąĖ čéą░ą║ čéą░ą╣ą╝ąĄčĆąŠą╝ ąŠą▒čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ, ąĮąĄ ą╝ąŠą│čā č鹊ą╗čīą║ąŠ "ą▒čŗčüčéčĆčŗą╣" ąĮą░čüč鹊ą╗čīą║ąŠ, čćč鹊 ąĮąĄ čāčüą┐ąĄą▓ą░čÄ ą▓čŗą╣čéąĖ ąĖąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąŠč鹊ą╝čā ąĖ ą▓čŗčüčéą░ą▓ąĖą╗ ą▓ąĄčĆčģąĮčÄčÄ ą│čĆą░ąĮąĖčåčā ą▓ 70ą║ąōčå - ąĄąĄ čģą▓ą░čéą░ąĄčé ąĘą░ ą│ą╗ą░ąĘą░. ą¤čĆąŠ ąŠčüčåąĖą╗ - ąĄčüą╗ąĖ č湥čüčéąĮąŠ čéą░ą║ąĖąĄ čćą░čüč鹊čéčŗ ąĮą░ą┤ąŠ ąĘą░ą┤ą░ą▓ą░čéčī, ą░ ąĮąĄ ą╗ąŠą▓ąĖčéčī, ąŠčüčåąĖą╗ ąĄčüčéčī, ą░ ą▓ąŠčé ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮąĄą╝ą░, ą┐ąŠč鹊ą╝čā ąĖ čłąĄą╗ čĆą░čüč湥čéąĮčŗą╝ ą┐čāč鹥ą╝. ą¤ąŠ ą┐ąŠą▓ąŠą┤čā ą┤čĆąĄą▒ąĄąĘą│ą░ - ąĖ čĆą░ą▒ąŠčéčŗ čü RC ąĖ čéčĆąĖą│ą│ąĄčĆą░ą╝ąĖ - ą▓čüąĄ čŹč鹊 ą║ąŠąĮąĄčćąĮąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąØą×, ąĄčüą╗ąĖ čüąĖą│ąĮą░ą╗ čĆąĄą░ą╗čīąĮąŠ ąĖą┤ąĄčé čü čćą░čüč鹊č鹊ą╣ 70 ą║ąōčå, ąĘą░č湥ą╝ ą╝ąĮąĄ ąĄą│ąŠ ą│ą░čüąĖčéčī, čüąĖčüč鹥ą╝ą░ ą┤ąŠą╗ąČąĮą░ čüą┐čĆą░ą▓ą╗čÅčéčīčüčÅ, ą░ ą▓ąŠčé č鹊 čćč鹊 ąĮąĄ ą┐ąŠą┐ą░ą╗ąŠ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮ, ą╝ąŠąČąĮąŠ, ąĮąŠ ą┤ą╗čÅ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ č鹊ąČąĄ ą┤ąŠą╗ąČąĮą░ čüą┐čĆą░ą▓ą╗čÅčéčīčüčÅ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 8 minutes 22 seconds:ą¤ąŠ čŹč鹊ą╣ SPL'ąĮąŠą╣ ą╝ąĄčłą░ąĮąĖąĮąĄ ą▓ąŠąŠą▒čēąĄ ąĮąĄą┐ąŠąĮčÅčéąĮąŠ, čćč鹊 čéą░ą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé. ąØąŠ čćč鹊-č鹊 ąŠč湥ąĮčī ą┐ąŠčģąŠąČąĄ, čćč鹊 čéą░ą╣ą╝ąĄčĆ ą▓ąŠąŠą▒čēąĄ ąĮąĄ ą▓ čĆąĄąČąĖą╝ąĄ 菹Įą║ąŠą┤ąĄčĆą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ, ą░ ą▓ čéčāą┐ąŠą╝ čĆąĄąČąĖą╝ąĄ čüč湥čéą░ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą║ą░ąĮą░ą╗čā! ąĮąĄ ą┐ąŠ ąŠą┤ąĮąŠą╝čā, ą░ ą┐ąŠ ą┤ą▓čāą╝, ąĮą░ ą▓č鹊čĆąŠą╝ ą░ąĮą░ą╗ąŠą│ąĖčćąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ąĖ čŹč鹊 ąĮąĖą║ą░ą║ąŠą│ąŠ ąŠčéąĮąŠčłąĄąĮąĖą╣ ą║ ąĮą░čüčéčĆąŠą╣ą║ąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ 菹Įą║ąŠą┤ąĄčĆą░ ąĮąĄ ąĖą╝ąĄąĄčé - čŹč鹊 ąĮą░čüčéčĆąŠą╣ą║ą░ čäąĖą╗čīčéčĆą░ - ąŠąĮą░ ąČąĄ ą┐ąŠ čüąŠą▓ą╝ąĄčüčéąĖč鹥ą╗čīčüčéą▓čā ąĮą░čüčéčĆąŠą╣ą║ą░ capture. ąØą░čüčéčĆąŠą╣ą║ą░ 菹Įą║ąŠą┤ąĄčĆą░ ąĖą┤ąĄčé ą▓ ą▒ąĖčéą░čģ SMS.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
tonyk
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 10:58:43 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
ąÜą░čĆą╝ą░: -4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 19, 2019 06:10:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1055
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĪčéčĆą░ąĮąĮą░čÅ ą╗ąŠą│ąĖą║ą░. ąŻ č鹥ą▒čÅ ąĖą┤čæčé ą┤čĆąĄą▒ąĄąĘą│ čü 菹Įą║ąŠą┤ąĄčĆą░. ąØąĄ ąĘąĮą░čÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┤čĆąĄą▒ąĄąĘą│ą░, ąĮąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, ąĮąĖ ą░ą┐ą┐čĆą░čéąĮąŠ ąĄą│ąŠ ąĮąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠą┤ą░ą▓ąĖčéčī. ąæąĄąĘ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ ą┐čĆąŠčüč鹊 ąĮąĄ ą┐ąŠąĮčÅčéąĮąŠ, čćč鹊 čéą░ą╝ ąĮą░čüčćąĖčéą░ąĄčé čéą░ą╣ą╝ąĄčĆ.
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 2 minutes 23 seconds:
ą¤ąŠą║ą░ąČąĖ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝čā čüąĖą│ąĮą░ą╗ąŠą▓ čü 菹Įą║ąŠą┤ąĄčĆą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 12:17:47 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÉ čā ą╝ąĄąĮčÅ ą▓ąŠą┐čĆąŠčü: čćč鹊 ą▓ ą▒ąĖčéą░čģ CKD čĆąĄą│ąĖčüčéčĆą░ TIM3->CR1? ąĢčüą╗ąĖ čéą░ą╝ ą┐ąŠ ąĮčāą╗čÅą╝, č鹊 fDTS = fCK_INT, čé.ąĄ. čäąĖą╗čīčéčĆ ą┐čĆąŠčüč鹊 ą╝ąŠąČąĄčé ąĖ ąĮąĄ ąŠčéčĆą░ą▒ąŠčéą░čéčī... ąÉ ą▓ąŠčé ąĄčüą╗ąĖ čéčāą┤ą░ ą┤ą▓ąŠąĄčćą║čā ąĘą░ą┐ąĖčüą░čéčī, č鹊 fDTS ą▒čāą┤ąĄčé ą▓ č湥čéčŗčĆąĄ čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ fCK_INTŌĆ” ąÉ čŹč鹊 ŌĆö čāąČąĄ ąĮąĄ 48ą£ąōčå, ą░ 12ą£ąōčå. ąó.ąĄ. ą┐čĆąĖ čäąĖą╗čīčéčĆą░čåąĖąĖ fDTS/32 N=8 ą┐ąŠą╗čāčćąĖą╝, čćč鹊 čéą░ą╣ą╝ąĄčĆ ą▒čāą┤ąĄčé ąŠčéčüąĄą║ą░čéčī ą▓čüąĄ čłčāą╝čŗ ą▓čŗčłąĄ ~46.9ą║ąōčå.
ąś ąĄčēąĄ: ąĄčüą╗ąĖ ąĮą░ PCLK (APB) ąĮąĄčé ą▓ą░ąČąĮąŠą╣ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ą╝ąŠąČąĮąŠ APB prescaler ąĘą░ą│ąĮą░čéčī ą▓ 1/16, ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ fCK_INT ą▒čāą┤ąĄčé čĆą░ą▓ąĮą░ HCLK/8, čé.ąĄ. 6ą£ąōčå, ąĄčüą╗ąĖ AHB čłčāčĆčāąĄčé ąĮą░ 48 (č鹊ą╗čīą║ąŠ čāč湥čüčéčī čŹč鹊 ą┐čĆąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüą░čĆč鹊ą▓ ąĖ ą┐čĆąŠč湥ą╣ ą┐ąĄčĆąĖč乥čĆąĖąĖ, čüąĖą┤čÅčēąĄą╣ ąĮą░ APB).
ąØčā ąĖ čüąŠą▓čüąĄą╝ čāąČ ą▓ ą║ą░č湥čüčéą▓ąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮč鹊ą▓, ą╝ąŠąČąĮąŠ AHB ą┐čĆąĖč鹊čĆą╝ąŠąĘąĖčéčī. ą¤čĆą░ą▓ą┤ą░, ą┐čĆąĖ čŹč鹊ą╝ ąĘą░č鹊čĆą╝ąŠąĘąĖčéčüčÅ ąĄčēąĄ ąĖ ąŠą▒čĆą░čēąĄąĮąĖąĄ ą║ ą┐ą░ą╝čÅčéąĖ, DMA ąĖ čé.ą┤., ąĖ čé.ą┐.
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Dimon456
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 12:51:55 |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 145
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą┤ąĄą║ 25, 2016 08:34:54
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1849
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Eddy_Em, ą│ą╗čÅąĮčī ą╝ąŠą╣ ą║ąŠą┤ ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: RCC->AHBENR |= RCC_AHBENR_GPIOAEN; //ą▓ą║ą╗čÄčćąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░ AHB = 48
/** TIM3 GPIO Configuration
PA6 ------> TIM3_CH1
PA7 ------> TIM3_CH2
*/
// ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ą░ PA6
GPIOA->MODER &= ~(GPIO_MODER_MODER6);
GPIOA->MODER |= (GPIO_MODER_MODER6_1); //10 Alternate
GPIOA->PUPDR |= GPIO_PUPDR_PUPDR6_0; //01 Alternate Function PP Pull-up
// ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ą░ PA7
GPIOA->MODER &= ~(GPIO_MODER_MODER7);
GPIOA->MODER |= (GPIO_MODER_MODER7_1);
GPIOA->PUPDR |= GPIO_PUPDR_PUPDR7_0; //01
/*Configure GPIO pin alternate function */
GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_1);
/*Configure GPIO pin alternate function */
GPIO_PinAFConfig(GPIOA, GPIO_PinSource7, GPIO_AF_1);
RCC->APB1ENR |= RCC_APB1ENR_TIM3EN; //čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░
TIM3->CCMR1 |= TIM_CCMR1_CC1S_0 | TIM_CCMR1_CC2S_0; //ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▓čģąŠą┤ą░
TIM3->CCER &= (uint16_t)(~(TIM_CCER_CC1P | TIM_CCER_CC2P)); // PA6 PA7
TIM3->SMCR |= TIM_SMCR_SMS_0 | TIM_SMCR_SMS_1 | TIM_SMCR_ETF; //čĆąĄąČąĖą╝ 菹Įą║ąŠą┤ąĄčĆą░
TIM3->CR1 |= TIM_CR1_CKD_1;
TIM3->CCMR1 |= TIM_CCMR1_IC1F_3 | TIM_CCMR1_IC1F_2 | TIM_CCMR1_IC1F_1 | TIM_CCMR1_IC1F_0;
TIM3->CCMR1 |= TIM_CCMR1_IC2F_3 | TIM_CCMR1_IC2F_2 | TIM_CCMR1_IC2F_1 | TIM_CCMR1_IC2F_0;
TIM3->ARR = 0xFFFF; //ąĘąĮą░č湥ąĮąĖąĄ, ą┤ąŠ ą║ąŠč鹊čĆąŠą│ąŠ čüčćąĖčéą░ąĄčé CNT
TIM3->CNT = 0x1FFF;
TIM3->CR1 |= TIM_CR1_CEN;
ąØą░ ą┐ą╗ą░č鹥 菹Įą║ąŠą┤ąĄčĆą░ ąĄčēąĄ ą┤ą▓ą░ čĆąĄąĘąĖčüč鹊čĆą░ ą┐ąŠ 10ą║ą×ą╝ ą▓ą┐ą░čÅąĮčŗ, ąĮą░ ą┐ąŠą┤čéčÅąČą║čā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 12:58:01 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Dimon456, ąĖ čćč鹊, ą▓čüąĄ čĆą░ą▓ąĮąŠ ąĮąĄ čäąĖą╗čīčéčĆčāąĄčé?
ąÉ ąĄčüą╗ąĖ APB prescaler ąĮą░ 1/16?
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Dimon456
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 13:19:32 |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 145
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą┤ąĄą║ 25, 2016 08:34:54
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1849
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Eddy_Em ą┐ąĖčüą░ą╗(ą░): ąĖ čćč鹊, ą▓čüąĄ čĆą░ą▓ąĮąŠ ąĮąĄ čäąĖą╗čīčéčĆčāąĄčé? ąØčā ą║ą░ą║ čüą║ą░ąĘą░čéčī, ąŠą┤ąĖąĮ čéąĖą║ ą┐ą╗ąŠčģąŠ ąŠčéčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ąŠčüąŠą▒ąĄąĮąĮąŠ ą┐čĆąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą▓ ą╝ąĄąĮčÄ ąČčāčéą║ąŠ ąĮąĄ čāą┤ąŠą▒ąĮąŠ, ą╝ąŠąČąĄčé ąĮą░ ą┤ą▓ą░ čéčĆąĖ ą┐čāąĮą║čéą░ ą┐ąĄčĆąĄčüą║ąŠčćąĖčéčī. ąŻ ą╝ąĄąĮčÅ ąĮąĄčé čģąŠčĆąŠčłąĄą│ąŠ ą▓ąĖą┤ąĄąŠ, čćč鹊 ąĮą░čłąĄą╗ ąĪą┐ąŠą╣ą╗ąĄčĆčüą╝ąŠčéčĆąĄčéčī ąĮą░ ąĮąĖąČąĮčÄčÄ čüčéčĆąŠą║čā, ą╗ąĄą▓čŗąĄ čåąĖčäčĆčŗ, ą│ą┤ąĄ 5008, čŹč鹊 菹Įą║ąŠą┤ąĄčĆąÆčüąĄ čéą░ą║ąĖ ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░, ąĮąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ. ąØąŠ čéą░ą║ ąĖ čģąŠč湥čéčüčÅ ą║ąŠąĮą┤ąĄčĆčćąĖą║ąĖ ą┐ąŠčüčéą░ą▓ąĖčéčī, ą┤čāą╝ą░čÄ ąĮą░ 1nF čüąŠą╣ą┤ąĄčé. Eddy_Em ą┐ąĖčüą░ą╗(ą░): ąÉ ąĄčüą╗ąĖ APB prescaler ąĮą░ 1/16? ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 19, 2021 13:36:00 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą£ąŠąČąĮąŠ ą▓ąŠąŠą▒čēąĄ ą┐ąŠ RC-čäąĖą╗čīčéčĆčā ą║ąĖą╗ąŠą│ąĄčĆčå ąĮą░ 10 ą▓ąŠčéą║ąĮčāčéčī.
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
U-M
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 03, 2021 15:22:08 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čüąĄąĮ 25, 2019 17:46:33
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 35
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąöąŠą▒čĆąŠą│ąŠ ą┤ąĮčÅ. ąĢčüą╗ąĖ ąĮąĄ ą┐čĆąŠčéąĖą▓, ą▓ą║ą╗ąĖąĮčÄčüčī čüąŠ čüą▓ąŠąĖą╝ ą▓ąŠą┐čĆąŠčüąŠą╝. ąŁąĮą║ąŠą┤ąĄčĆ ąŠą▒čŗčćąĮčŗą╣, ą░ą╗ąĖ菹║čüą┐čĆąĄčüčü-ą║ąĖčéą░ą╣čüą║ąĖą╣ ąĢąĪ11, ą║ą░ąČąĄčéčüčÅ 15 ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ ąŠą▒ąŠčĆąŠčé, ąĮą░ čüąĖąĮąĄą╣ ą║čĆčāą│ą╗ąŠą╣ ą┐ą╗ą░č鹥. ąÆ ąĄą│ąŠ ąŠą▒ą▓čÅąĘą║ąĄ čāąČąĄ ąĄčüčéčī čĆąĄąĘąĖčüč鹊čĆčŗ ą┐ąŠą┤čéčÅąČą║ąĖ ą║ ą┐ąĖčéą░ąĮąĖčÄ ąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ ą║ ąĘąĄą╝ą╗ąĄ. ąŁą║čüą┐ąĄčĆąĖą╝ąĄąĮčé ą┐čĆąŠčģąŠą┤ąĖčé ąĮą░ STM32F103C8. ąóą░ą╣ą╝ąĄčĆ ąĮą░čüčéčĆąŠąĄąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü 菹Įą║ąŠą┤ąĄčĆąŠą╝ čéą░ą║: ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: htim3.Instance = TIM3;
htim3.Init.Prescaler = 1;
htim3.Init.CounterMode = TIM_COUNTERMODE_CENTERALIGNED3;
htim3.Init.Period = 100;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
sConfig.EncoderMode = TIM_ENCODERMODE_TI1;
sConfig.IC1Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 15;
sConfig.IC2Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 15;
if (HAL_TIM_Encoder_Init(&htim3, &sConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
} ąŚąĮą░č湥ąĮąĖąĄ ąĘą░ą▒ąĖčĆą░ąĄčéčüčÅ čéą░ą║: ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: encoder_counter = __HAL_TIM_GET_COUNTER(&htim3); ąóčāčé ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüč湥čéčćąĖą║ą░ 菹Įą║ąŠą┤ąĄčĆą░ ąŠčé 0 ą┤ąŠ 100, ą▒ąĄąĘ ą┐ąĄčĆąĄčģąŠą┤ą░ č湥čĆąĄąĘ 0 ąĖą╗ąĖ č湥čĆąĄąĘ 100, čü čłą░ą│ąŠą╝ 1. ą¤čĆąĖ ą┤ąŠčüčéąĖąČąĄąĮąĖąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĖą╗ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░, ąĄčüą╗ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą▓čĆą░čēąĄąĮąĖąĄ ą▓ čéčā ąČąĄ čüč鹊čĆąŠąĮčā ą┤ą░ą╗čīčłąĄ, čüč湥čéčćąĖą║ ąĮą░čćąĖąĮą░ąĄčé ą║ąŠą╗ąĄą▒ą░čéčīčüčÅ čā čüą▓ąŠąĄą│ąŠ ą┤ąŠčüčéąĖą│ąĮčāč鹊ą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ąŠčüčćąĖčéą░ą╗ąĖ-ą┤ąŠą║čĆčāčéąĖą╗ąĖ ą┤ąŠ 0, ą┐čĆąŠą┤ąŠą╗ąČą░ąĄą╝ ą║čĆčāčéąĖčéčī ą▓ čüč鹊čĆąŠąĮčā čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ą┤ą░ą╗čīčłąĄ, čüč湥čéčćąĖą║ ą╝ąĄąĮčÅąĄčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0-1-0-0-0-1-0 ąĖ čé.ą┐. ąśą╗ąĖ ą┤ąŠčüčćąĖčéą░ą╗ąĖ ą┤ąŠ 100, ą║čĆčāčéąĖą╝ ą▓ čüč鹊čĆąŠąĮčā čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ą┤ą░ą╗čīčłąĄ, ą▓ąĖą┤ąĖą╝ 100-99-100-99-98 ąĖ čé.ą┐. ąĪą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ ą▓ą░ą╗ą░ ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄ ą▓ą░ąČąĮą░. ąĢčüą╗ąĖ ą▓ą░ą╗ ąŠčüčéą░ą▓ąĖčéčī ą▓ ą┐ąŠą║ąŠąĄ ą▓ ą╗čÄą▒ąŠą╝ čüą▓ąŠąĄą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ ąĖ ą╗čÄą▒ąŠą╝ ąĘąĮą░č湥ąĮąĖąĖ čüč湥čéčćąĖą║ą░, č鹊 čüą░ą╝ąŠą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą│ąŠ ą┐ą╗ą░ą▓ą░ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ąĮąĄčé. ą¤ą░čĆą░ą╝ąĄčéčĆ Input Filter ą╝ąĄąĮčÅčéčī ą┐čĆąŠą▒ąŠą▓ą░ą╗, čĆąĄąĘčāą╗čīčéą░čéą░ ąĮąĄ ą▓ąĖą┤ąĮąŠ. ą¤čĆąĖ ą▓čĆą░čēąĄąĮąĖąĖ ąĮąĄ ąĮą░ ą│čĆą░ąĮąĖčåą░čģ čüč湥čéą░, čŹč鹊ą│ąŠ čŹčäč乥ą║čéą░ ąĮąĄčé. ąĪą┐čĆą░ą▓ąŠčćąĮąŠ - čŹč鹊čé-ąČąĄ 菹Įą║ąŠą┤ąĄčĆ ąĮą░ ą░čĆą┤čāąĖąĮąĄ ą▓ąĄą┤ąĄčé čüąĄą▒čÅ ą░ą┤ąĄą║ą▓ą░čéąĮąŠ. ąĢčüčéčī-ą╗ąĖ čĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ čéą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░ čā 菹Įą║ąŠą┤ąĄčĆą░?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 03, 2021 16:04:22 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
U-M, ą║ą░ą║-č鹊 čüčéčĆą░ąĮąĮąŠ čā ą▓ą░čü ąĮą░čüčéčĆąŠąĄąĮ 菹Įą║ąŠą┤ąĄčĆ. ąØąĄ ą┤ąŠą╗ąČąĮąŠ čéą░ą║ąŠą│ąŠ ą▒čŗčéčī: ą┐ąŠčüą╗ąĄ 0 ą┤ąŠą╗ąČąĮąŠ čüą╗ąĄą┤ąŠą▓ą░čéčī 99, 98 ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ; ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠ ą┐ąŠčüą╗ąĄ 100 ą┤ąŠą╗ąČąĮąŠ ąĖą┤čéąĖ 0, 1, 2 ąĖ čé.ą┤.
ąÜą░ą╗ąŠą▓čüą║čāčÄ ą┐ąŠčĆčéčÅąĮą║čā ą▓čĆčÅą┤ ą╗ąĖ ą║č鹊 čćąĖčéą░čéčī ą▒čāą┤ąĄčé. ąöą░ą╣č鹥 ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ ą║ąŠą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ!
P.S. ąÉ čéą░ą╣ą╝ąĄčĆ čüą╗čāčćą░ąĄą╝ ąĮąĄ ą▓ center-aligned mode?
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
U-M
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 03, 2021 23:16:32 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čüąĄąĮ 25, 2019 17:46:33
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 35
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąöą░, čéą░ą╣ą╝ąĄčĆ ą▓ aligned mode 3.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
alex_
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąĖčÄąĮ 20, 2023 10:20:55 |
|
| ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé |
 |
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 82
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ąĖčÄąĮ 01, 2013 22:24:21
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 751
ą×čéą║čāą┤ą░: ą¤ążą×
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąŚą┤čĆą░čüčéąĖ  ąŻ ą╝ąĄąĮčÅ ąĖąĮą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░, ąŠą┐čŗčéą░ ą▓ ąĪąóą£ ą┐ąŠą║ą░ ąĮąĄ ą╝ąĮąŠą│ąŠ ą┐ąŠčŹč鹊ą╝čā čüąĖą╗čīąĮąŠ ąĮąĄ ą┐ąĖąĮą░ą╣č鹥. ąÆąŠą┐čĆąŠčü čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆąŠą▓, ą▓ąŠąĘą╝ąŠąČąĮąŠ ą╗ąĖ čéą░ą║ąŠąĄ: čÅ ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ 菹Įą║ąŠą┤ąĄčĆ ą║ čéą░ą╣ą╝ąĄčĆčā ąó4 ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé, ąĮąŠ ą║ą░ą║ č鹊 ąĮčāąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ(ą┤ąŠą┐čāčüčéąĖą╝ č湥čĆąĄąĘ ą║ą░ąČą┤čŗčģ 100 čéąĖą║ąŠą▓ čŹč鹊ą│ąŠ čéą░ą╣ą╝ąĄčĆą░), ą┐ąŠą╗ą░ą│ą░čÄ čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ ą┤ąĄą╗ą░čéčī ąĮąĄ ą▓ą░čĆąĖą░ąĮčé, ą┐ąŠč鹥čĆčÅąĄą╝ č鹥ą║čāčēąĄąĄ ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ (0-0xffff), ąĄčüčéčī ąĖą┤ąĄčÅ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą║ čüčćčæčéąĮąŠą╝čā ą▓čģąŠą┤čā ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą▓č鹊čĆąŠą╣ čéą░ą╣ą╝ąĄčĆ ą║ąŠč鹊čĆčŗą╣ ą▒čŗ ąĖ ą│ąĄąĮąĄčĆąĖą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ ą║ ą┐čĆąĖą╝ąĄčĆčā ą║ą░ąČą┤čŗąĄ 100 ąĖą╝ą┐čāą╗čīčüąŠą▓? ąśą╗ąĖ čŹč鹊 ą╝ąŠąČąĮąŠ ą║ą░ą║ č鹊 ąĖąĮą░č湥 čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī? ąØąŠ č鹊ą╗čīą║ąŠ ąĮąĄ č湥čĆąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠą┤ąĮąŠ ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĖą╝ą┐čāą╗čīčüąŠą▓. ąÆ čćčæą╝ čüąŠą▒čüčéą▓ąĄąĮąĮąŠ čüčāčéčī: ąĮą░ čåąĄą┐ąĖ ą╗ąĄąČąĖčé ąŠą▒čŖąĄą║čé, čåąĄą┐čī ą┐čĆąĖ čŹč鹊ą╝ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ, ąĮą░ čåąĄą┐ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ą╗čīąĮčŗą╣ 菹Įą║ąŠą┤ąĄčĆ, ą▓ ąĘąŠąĮąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą░čéčćąĖą║ ąĖ č湥čĆąĄąĘ ą┤ąŠą┐čāčüčéąĖą╝ 1-5-10 čüą╝ ąĮčāąČąĮąŠ čüčćąĖčéčŗą▓ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ čü ą┤ą░čéčćąĖą║ą░ ą┐čĆąĖ čŹč鹊ą╝ ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ čüčćčæčéčćąĖą║ą░ ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ ąĖ ą║ąŠąĮčåą░ ąŠą▒čŖąĄą║čéą░ čćč鹊ą▒čŗ ą┐ąŠč鹊ą╝ ą▓čŗčćąĖčüą╗ąĖčéčī ąĖč鹊ą│ąŠą▓čāčÄ ą┤ą╗ąĖąĮčā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
tonyk
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĖčÄąĮ 21, 2023 06:03:32 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
ąÜą░čĆą╝ą░: -4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 19, 2019 06:10:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1055
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 2
|
alex_ ą┐ąĖčüą░ą╗(ą░): ąĮą░ čåąĄą┐ąĖ ą╗ąĄąČąĖčé ąŠą▒čŖąĄą║čé, čåąĄą┐čī ą┐čĆąĖ čŹč鹊ą╝ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ, ąĮą░ čåąĄą┐ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ą╗čīąĮčŗą╣ 菹Įą║ąŠą┤ąĄčĆ ąŻ čéą░ą╣ą╝ąĄčĆąŠą▓-čüčćčæčéčćąĖą║ąŠą▓ ąĄčüčéčī ą╝ąŠą┤čāą╗čī čüčĆą░ą▓ąĮąĄąĮąĖčÅ. ąæąĄčĆčæčłčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüčćčæčéčćąĖą║ą░, ą┤ąŠą▒ą░ą▓ą╗čÅąĄčłčī ąĖą╗ąĖ ą▓čŗčćąĖčéą░ąĄčłčī ąĖąĘ ąĮąĄą│ąŠ ąĮčāąČąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓, čĆą░ąĘčĆąĄčłąĄą░ąĄčłčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé čŹč鹊ą│ąŠ ą║ą░ąĮą░ą╗ą░ čüčĆą░ą▓ąĮąĄąĮąĖčÅ- ąĖ ą▓ ą┐čāčéčī. ąŻą┐čĆą░ą▓ą╗čÅą╗ ą║ąŠąĮą▓ąĄą╣ąĄčĆąŠą╝. ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮąĄ ą▒čŗą╗ąŠ, čāą┐čĆą░ą▓ą╗čÅą╗ čłą░ą│ąŠą▓čŗą╝ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝, ąĮąŠ čüčāčéčī čéą░ąČąĄ čüą░ą╝ą░čÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
alex_
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĖčÄąĮ 21, 2023 10:22:48 |
|
| ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 82
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ąĖčÄąĮ 01, 2013 22:24:21
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 751
ą×čéą║čāą┤ą░: ą¤ążą×
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąØčā ą║ą░ą║ ą▓ą░čĆąĖą░ąĮčé, ąĄčüą╗ąĖ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčīčüčÅ čéą░ą╣ą╝ąĄčĆčŗ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī. ą¤ąŠą║ą░ ą┐čŗčéą░čÄčüčī T4 master->T12 save
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
tonyk
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĖčÄąĮ 21, 2023 11:18:47 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
ąÜą░čĆą╝ą░: -4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 19, 2019 06:10:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1055
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØčā ą║ą░ą║ ą▓ą░čĆąĖą░ąĮčé, ąĄčüą╗ąĖ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčīčüčÅ čéą░ą╣ą╝ąĄčĆčŗ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī. ąŚą░č湥ą╝ ąĖčģ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī? TIM2 ąĖ TIM5 ąĖą╝ąĄčÄčé ą░ąČ 32 ą▒ąĖčéą░. ąÆą┐čĆąŠč湥ą╝, ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ąĘą░ą┤ą░čć čģą▓ą░čéą░ąĄčé 16 ą▒ąĖčé. ąĢčēčæ ąŠą▒čĆą░čéąĖ ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čäą╗ą░ą│ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÆąŠąĘą╝ąŠąČąĮąŠ, č鹥ą▒ąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ąŠčéą║ą╗čÄčćąĖčéčī čäą╗ą░ą│ ą┐ąĄčĆąĄčģąŠą┤ą░ čüčćčæčéčćąĖą║ą░ č湥čĆąĄąĘ ąĮąŠą╗čī, ąŠčüčéą░ą▓ąĖą▓ č鹊ą╗čīą║ąŠ čüąĖą│ąĮą░ą╗čŗ ąŠčé ą╝ąŠą┤čāą╗čÅ čüčĆą░ą▓ąĮąĄąĮąĖą╣.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
alex_
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĖčÄąĮ 21, 2023 13:48:35 |
|
| ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé |
|
ąÜą░čĆą╝ą░: 7
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 82
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ąĖčÄąĮ 01, 2013 22:24:21
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 751
ą×čéą║čāą┤ą░: ą¤ążą×
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą£ąĮąĄ ąĮčāąČąĮąŠ čćč鹊ą▒čŗ ąŠąĮąĖ čĆą░ą▒ąŠčéą░ą╗ąĖ čüąĖąĮčģčĆąŠąĮąĮąŠ, ąó4 čģčĆą░ąĮąĖčé ąĘąĮą░č湥ąĮąĖąĄ č鹥ą║čāčēąĄą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čåąĄą┐ąĖ(0-0xffff), ą▓ ąó12 ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖ ą┐ąŠčüčéąĖąČąĄąĮąĖąĖ ą║ąŠč鹊čĆąŠą│ąŠ(TIM12_ARR = 20-50-150) čüčćčæčéčćąĖą║ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ ąĮąŠą╗čī ąĖ č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąźąŠčćčā čüą┤ąĄą╗ą░čéčī ą▓čüčæ ąĮą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝ čāčĆąŠą▓ąĮąĄ ą▒ąĄąĘ ąĘą░ą╝ąŠčĆąŠčćą║ąĖ čü čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ čüčĆą░ą▓ąĮąĄąĮąĖčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
tonyk
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŁąĮą║ąŠą┤ąĄčĆ ąĖ STM32 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĖčÄąĮ 21, 2023 14:19:00 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
ąÜą░čĆą╝ą░: -4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 19, 2019 06:10:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1055
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
alex_ ą┐ąĖčüą░ą╗(ą░): čüčćčæčéčćąĖą║ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ ąĮąŠą╗čī ąĖ č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąźąŠčćčā čüą┤ąĄą╗ą░čéčī ą▓čüčæ ąĮą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝ čāčĆąŠą▓ąĮąĄ ą▒ąĄąĘ ąĘą░ą╝ąŠčĆąŠčćą║ąĖ čü čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ čüčĆą░ą▓ąĮąĄąĮąĖčÅ. ąóą░ą║ ą▓ąĄą┤čī ąĄčüą╗ąĖ č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, č鹊 čćč鹊 čüą╗ąŠąČąĮąŠą│ąŠ ą▓ ąĮčæą╝ čüą▒čĆąŠčüąĖčéčī čüčćčæčéčćąĖą║? ąĢčüą╗ąĖ čāąČ čéą░ą║ čģąŠč湥čéčüčÅ, čćč鹊ą▒čŗ ą▓čüčæ ą┤ąĄą╗ą░ą╗ąŠčüčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, č鹊 ą╝ąŠąČąĮąŠ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī DMA ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĮčāą╗čÅ, čģąŠčéčÅ, ąśą£ąźą×, ąĘą░č湥ą╝ čéą░ą║ąŠą╣ ąĖąĘą▓čĆą░čé?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 3 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 71 ] |
, , , |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 31 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|










