 |
 |
|||||||||||||||
ą¤čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čłą░ą│ąŠą▓čŗą╝ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝
ąÉą▓č鹊čĆ: ą£ąÜąĪ, uels73@mail.ru ą×ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠąĄ ąĮąĖąČąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī čāąĮąĖą┐ąŠą╗čÅčĆąĮčŗą╝ čłą░ą│ąŠą▓čŗą╝ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝ čéąĖą┐ą░ ąĪąöąź 1,8/40 ąĖ ą░ąĮą░ą╗ąŠą│ąĖčćąĮčŗą╝. ąĪčģąĄą╝ą░ 菹╗ąĄą║čéčĆąĖč湥čüą║ą░čÅ ą┐čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮą░čÅ ą▒ą╗ąŠą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĘąŠą▒čĆą░ąČąĄąĮą░ ąĮą░ čĆąĖčü.1. ą×ąĮ ą▓čŗą┐ąŠą╗ąĮąĄąĮ ąĮą░ ą▒ą░ąĘąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega 8 čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ąŠčé ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ čćą░čüč鹊č鹥 2 ą£ąōčå. ąÆ ą║ą░č湥čüčéą▓ąĄ ą║ą╗čÄč湥ą╣, ą║ąŠą╝ą╝čāčéąĖčĆčāčÄčēąĖčģ ąŠą▒ą╝ąŠčéą║ąĖ čłą░ą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą£1, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą╝ąĖą║čĆąŠčüčģąĄą╝ DD2, DD3 čéąĖą┐ą░ SN75452 (čĆčāčüčüą║ąĖą╣ ą░ąĮą░ą╗ąŠą│ - ąÜ155ąøąÉ18). ąŁč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ – ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą╗ą╗ąĄą║č鹊čĆąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝.
ąæą╗ąŠą║ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąĖ ą┤ąĖčüą║čĆąĄčéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝ąŠč鹊čĆąŠą╝. ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ - čāą│ąŠą╗ ą┐ąŠą▓ąŠčĆąŠčéą░ čĆąŠč鹊čĆą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ, ąĘą░ą┤ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆąŠą╝ R1. ąÆ čĆąĄąČąĖą╝ąĄ ą┤ąĖčüą║čĆąĄčéąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ - ą▓čĆą░čēąĄąĮąĖąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ «ą▓ą╗ąĄą▓ąŠ», «ą▓ą┐čĆą░ą▓ąŠ», «čüč鹊ą┐» ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą║ąĮąŠą┐ą║ą░ą╝ąĖ S1 ąĖ S2. ąÜčĆąŠą╝ąĄ čŹč鹊ą│ąŠ, ą▓ čüčģąĄą╝ąĄ ą╝ąŠąČąĮąŠ ą▓čŗą▒ąĖčĆą░čéčī čłą░ą│ąŠą▓čŗą╣ ąĖą╗ąĖ ą┐ąŠą╗čāčłą░ą│ąŠą▓čŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ, ą░ čéą░ą║ąČąĄ čüą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ.
 ąŻčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ X4 ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą░ ą┐čĆąĖ ąĄąĄ ąŠčéčüčāčéčüčéą▓ąĖąĖ – ą┤ąĖčüą║čĆąĄčéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ. ą¤ąĄčĆąĄą╝čŗčćą║ąŠą╣ X5 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čłą░ą│ąŠą▓čŗą╣ ąĖ ą┐ąŠą╗čāčłą░ą│ąŠą▓čŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ąÆčüąĄ čŹčéąĖ čĆąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓ą║ą╗čÄč湥ąĮąĖčÅ čüčģąĄą╝čŗ ąĖą╗ąĖ čüą▒čĆąŠčüą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą¤ąŠčŹč鹊ą╝čā ąĮčāąČąĮčŗąĄ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąĄčĆąĄą┤ ą▓ą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ. ąÆ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ ą┤ą▓ą░ ą║ą░ąĮą░ą╗ą░ ąÉą”ą¤. ąØą░ ą▓čģąŠą┤ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĮąĖčģ – ADC5 (28 ąĮąŠąČą║ą░) ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą┐ąŠą┤čüčéčĆąŠąĄčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ R3. ąĪ ąĄą│ąŠ ą┐ąŠą╝ąŠčēčīčÄ čĆąĄą│čāą╗ąĖčĆčāąĄčéčüčÅ čüą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐čĆąĖ ą╗čÄą▒ąŠą╝ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéčŗ čüčģąĄą╝čŗ.
ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčéčüčÅ ąĄčēąĄ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗ ąÉą”ą¤ – ADC4 (27 ąĮąŠąČą║ą░). ąØą░ ąĄą│ąŠ ą▓čģąŠą┤ č湥čĆąĄąĘ ąĖąĮč鹥ą│čĆąĖčĆčāčÄčēčāčÄ čåąĄą┐čī R2, C1 ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ R1, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┤ą░ąĄčé čāą│ąŠą╗ ą┐ąŠą▓ąŠčĆąŠčéą░ čĆąŠč鹊čĆą░ ą╝ąŠč鹊čĆą░. ąĪą║ąŠčĆąŠčüčéčī čĆą░ą▒ąŠčéčŗ ąÉą”ą¤ ą▓ ą┤ą░ąĮąĮąŠą╣ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čü 8 - ą▒ąĖčéąĮąŠą╣ č鹊čćąĮąŠčüčéčīčÄ. ą¤ąŠčŹč鹊ą╝čā ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ čĆčāčćą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ R1 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāčüą╗ąŠą▓ąĮąŠ čĆą░ąĘą▒ąĖą▓ą░ąĄčé ąĮą░ 255 čłą░ą│ąŠą▓. ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čĆąŠč鹊čĆą░ čłą░ą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ąöą╗čÅ čŹč鹊ą│ąŠ, ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ čĆą░ą▒ąŠčéčŗ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ «ą▓čĆą░čēąĄąĮąĖąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą▓ą╗ąĄą▓ąŠ» ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ čäą╗ą░ąČąŠą║, ąĘą░ą║čĆąĄą┐ą╗ąĄąĮąĮčŗą╣ ąĮą░ čĆąŠč鹊čĆąĄ ą╝ąŠč鹊čĆą░, ąĮąĄ «ą┤ąŠąĄą┤ąĄčé» ą┤ąŠ ą║ąŠąĮčåąĄą▓ąŠą│ąŠ ą┤ą░čéčćąĖą║ą░ (ąŠą┐č鹊ą┐ą░čĆčŗ) VT1, HL1. ą¤čĆąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ čüąĖą│ąĮą░ą╗ą░ čü ą┤ą░čéčćąĖą║ą░ VT1, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą▒ąĮčāą╗čÅąĄčé čĆąĄą│ąĖčüčéčĆ-čüč湥čéčćąĖą║ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čłą░ą│ąŠą▓ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ, ąĖąĘą╝ąĄčĆčÅąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ R1, ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ąĄą│ąŠ ą▓ čåąĖčäčĆąŠą▓ąŠą╣ ą║ąŠą┤ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0 ą┤ąŠ 255, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĄą│ąŠ ą▓ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé čĆąĄą│ąĖčüčéčĆą░ čĆąĄąĘčāą╗čīčéą░čéą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąÉą”ą¤ (čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ R1), ą░ ąĘą░č鹥ą╝ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčé ąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░-čüč湥čéčćąĖą║ą░ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čłą░ą│ąŠą▓ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ąĢčüą╗ąĖ čćąĖčüą╗ąŠ čłą░ą│ąŠą▓ čĆąĄąĘąĖčüč鹊čĆą░ R1 ą▒ąŠą╗čīčłąĄ č湥ą╝ čłą░ą│ąŠą▓ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą£1, č鹊 ą▓čŗą┤ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░: «ą▓čĆą░čēąĄąĮąĖąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą▓ą┐čĆą░ą▓ąŠ». ą¤čĆąĖ čŹč鹊ą╝ čü ą║ą░ąČą┤čŗą╝ čłą░ą│ąŠą╝ čĆąŠč鹊čĆą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĖąĮą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ą░ čłą░ą│ąŠą▓ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĖ ąĄą│ąŠ čüčĆą░ą▓ąĮąĄąĮąĖąĄ čü čćąĖčüą╗ąŠą╝ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąÉą”ą¤ (čłą░ą│ąĖ čĆąĄąĘąĖčüč鹊čĆą░ R1). ąÜąŠą│ą┤ą░ čćąĖčüą╗ąŠ čłą░ą│ąŠą▓ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ čüčéą░ąĮąĄčé čĆą░ą▓ąĮąŠ čćąĖčüą╗čā ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąÉą”ą¤, ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░: «čüč鹊ą┐». ą¤ąŠą▓ąŠčĆą░čćąĖą▓ą░čÅ čĆčāčćą║čā čĆąĄąĘąĖčüč鹊čĆą░ R1 «ą▓ą╗ąĄą▓ąŠ», čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ čāčĆąŠą▓ąĄąĮčī ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ą▓čģąŠą┤ąĄ ąÉą”ą¤. ą¤čĆąĖ čŹč鹊ą╝ čćąĖčüą╗ąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čĆąĄąĘčāą╗čīčéą░čéą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąÉą”ą¤ čüčéą░ąĮąĄčé ą╝ąĄąĮčīčłąĄ č湥ą╝ č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ - čüč湥čéčćąĖą║ą░ čłą░ą│ąŠą▓. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čŗą┤ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░: «ą▓čĆą░čēąĄąĮąĖąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą▓ą╗ąĄą▓ąŠ». ąĪ ą║ą░ąČą┤čŗą╝ čłą░ą│ąŠą╝ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┤ąĄą║čĆąĄą╝ąĄąĮčé čĆąĄą│ąĖčüčéčĆą░-čüč湥čéčćąĖą║ą░ čłą░ą│ąŠą▓ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ čćąĖčüą╗ą░ ą▓ ąŠą▒ąŠąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ąĮąĄ čüčéą░ąĮčāčé čĆą░ą▓ąĮčŗ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čĆą░čēą░čÅ čĆčāčćą║čā ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ R1, čĆąŠč鹊čĆ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ą▓ č鹊ą╝ ąČąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąĖ ąĮą░ čéą░ą║ąŠąĄ ąČąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓.
ą×čéą╝ąĄčćčā, čćč鹊 ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝čŗą╣ ą┤ą▓ąĖą│ą░č鹥ą╗čī čüąŠą▓ąĄčĆčłą░ąĄčé ąŠą┤ąĖąĮ ąŠą▒ąŠčĆąŠčé ąĮą░ 360° ąĘą░ 200 čłą░ą│ąŠą▓ (čé.ąĄ. ąŠą┤ąĖąĮ čłą░ą│ – 1,8 ą│čĆą░ą┤.). ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą▓ ą┤ą░ąĮąĮąŠą╣ čüčģąĄą╝ąĄ, ąĘą░ 255 čāčüą╗ąŠą▓ąĮčŗčģ čłą░ą│ąŠą▓ ąŠčé ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ R1, čĆąŠč鹊čĆ ą╝ąŠč鹊čĆą░ čüą┤ąĄą╗ą░ąĄčé ą▒ąŠą╗ąĄąĄ ąŠą┤ąĮąŠą│ąŠ ąŠą▒ąŠčĆąŠčéą░ ąĖ ą┐ąŠą▓ąĄčĆąĮąĄčéčüčÅ ąĮą░ čāą│ąŠą╗ 459°. ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ čāą│ą╗ą░ ą┐ąŠą▓ąŠčĆąŠčéą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠąĮčåąĄą▓ąŠą╣ ą┤ą░čéčćąĖą║ (ąŠą┐č鹊ą┐ą░čĆą░) ą┤ą╗čÅ ą║čĆą░ą╣ąĮąĄą│ąŠ ą┐čĆą░ą▓ąŠą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čĆąŠč鹊čĆą░. ą×ąĮ ą▓čŗą┐ąŠą╗ąĮąĄąĮ ąĮą░ 菹╗ąĄą╝ąĄąĮčéą░čģ VT2, HL2. ąöą╗čÅ ą▒ąŠą╗ąĄąĄ č鹊čćąĮąŠą│ąŠ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ čāą│ą╗ą░ ą┐ąŠą▓ąŠčĆąŠčéą░ čĆčāčćą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ čĆąŠč鹊čĆąŠą╝ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ čĆą░ąĘčĆčŗą▓ ą▓čŗą▓ąŠą┤ą░ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ R1, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ «+5 ąÆ», ąŠą│čĆą░ąĮąĖčćąĖč鹥ą╗čīąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ RąŠą│čĆ.. ąĢą│ąŠ ąĮąŠą╝ąĖąĮą░ą╗ čüą╗ąĄą┤čāąĄčé čéčēą░č鹥ą╗čīąĮąŠ ą┐ąŠą┤ąŠą▒čĆą░čéčī (ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠčé 1 ą┤ąŠ 3 ą║ą×ą╝).
ąÆ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čĆąŠč鹊čĆą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ą▒ąŠčéčŗ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ čüą╗čāčćą░ąĄ ą┐čĆąŠčüą║ą░ą╗čīąĘčŗą▓ą░ąĮąĖčÅ čłą░ą│ąŠą▓ čĆąŠč鹊čĆą░, ą┐ąŠ ą║ą░ą║ąŠą╣ ą╗ąĖą▒ąŠ ą┐čĆąĖčćąĖąĮąĄ (ą┤ą▓ąĖą│ą░č鹥ą╗čī ą┐ąĄčĆąĄą│čĆčāąČąĄąĮ, ąĘą░čåąĄą┐ąĖą╗čüčÅ ąĘą░ čćč鹊-č鹊 ąĖ čé.ą┤.), ą╝ąŠąČąĮąŠ ą┐ąŠą▓ąĄčĆąĮčāčéčī čĆčāčćą║čā ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ R1 ą▓ ą║čĆą░ą╣ąĮąĄąĄ ą╗ąĄą▓ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ąĖ ą┐ąŠą┤ąŠąČą┤ą░čéčī 2 - 3 čüąĄą║čāąĮą┤čŗ. ą¤čĆąĖ čŹč鹊ą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠą▓ąĄčĆą║ą░ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čäą╗ą░ąČą║ą░ čĆąŠč鹊čĆą░ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┐čéąĖč湥čüą║ąŠą│ąŠ ą┤ą░čéčćąĖą║ą░ ą║čĆą░ą╣ąĮąĄą│ąŠ ą╗ąĄą▓ąŠą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ VT1. ąĢčüą╗ąĖ čäą╗ą░ąČąŠą║ ąĮąĄ ąĘą░čłąĄą╗ ą▓ ąĘąŠąĮčā čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą┤ą░čéčćąĖą║ą░, ąĘąĮą░čćąĖčé ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüą╝ąĄčēąĄąĮąĖąĄ čłą░ą│ąŠą▓ čĆąŠč鹊čĆą░ ą╝ąŠč鹊čĆą░ ą£1 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čłą░ą│ąŠą▓ čĆąĄąĘąĖčüč鹊čĆą░ R1. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüąĖčüč鹥ą╝čŗ, ąĖ čĆą░ą▒ąŠčéą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ.
ąöą╗čÅ čĆą░ą▒ąŠčéčŗ čüčģąĄą╝čŗ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą┐čéąĖč湥čüą║ąĖą╣ ą┤ą░čéčćąĖą║ ą║čĆą░ą╣ąĮąĄą│ąŠ ą╗ąĄą▓ąŠą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ VT1 - ąŠą▒čÅąĘą░č鹥ą╗ąĄąĮ. ąöą░čéčćąĖą║ ą║čĆą░ą╣ąĮąĄą│ąŠ ą┐čĆą░ą▓ąŠą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ VT2 ą╝ąŠąČąĮąŠ ąĮąĄ čüčéą░ą▓ąĖčéčī, ąĄčüą╗ąĖ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čĆąŠč鹊čĆą░ ą┐čĆąĖ ą▓čĆą░čēąĄąĮąĖąĖ ą▓ą┐čĆą░ą▓ąŠ. ąØąŠ, č鹊ą│ą┤ą░, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ 14 ą▓čŗą▓ąŠą┤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ +5 ąÆ.
ą¤čĆąĖ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝ ą▓ ą┐ąŠą╗čāčłą░ą│ąŠą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ čĆąŠč鹊čĆ čüąŠą▓ąĄčĆčłą░ąĄčé ą┐ąŠą▓ąŠčĆąŠčé ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠčé 0° ą┤ąŠ 230°. ą£ąŠčēąĮąŠčüčéčī ą╝ąŠč鹊čĆą░ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ, ąĘą░č鹊 čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ą┐ą╗ą░ą▓ąĮąŠčüčéčī čģąŠą┤ą░. ąŁč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāčćąĖčéčŗą▓ą░čéčī ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ.
ąÆ čĆąĄąČąĖą╝ąĄ ą┤ąĖčüą║čĆąĄčéąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆą░čēąĄąĮąĖąĄ «ą▓ą┐čĆą░ą▓ąŠ» ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą║ąĮąŠą┐ą║ąŠą╣ S1, ą▓čĆą░čēąĄąĮąĖąĄ «ą▓ą╗ąĄą▓ąŠ» - ą║ąĮąŠą┐ą║ąŠą╣ S2. ąĢčüą╗ąĖ ą║ąĮąŠą┐ą║ąĖ ąĮąĄ ąĮą░ąČą░čéčŗ, ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ «čüč鹊ą┐». ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ R1 ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ. ą×ą┐čéąĖč湥čüą║ąĖąĄ ą┤ą░čéčćąĖą║ąĖ VT1, HL1 ąĖ VT2, HL2 čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ąŠą│čĆą░ąĮąĖčćąĖč鹥ą╗ąĖ ą║čĆą░ą╣ąĮąĖčģ ą┐ąŠą╗ąŠąČąĄąĮąĖą╣ čĆąŠč鹊čĆą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą£1. ąĢčüą╗ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ą▓čĆą░čēąĄąĮąĖčÅ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, č鹊 čŹčéąĖ ąŠą┐č鹊ą┐ą░čĆčŗ ą╝ąŠąČąĮąŠ ąĮąĄ čüčéą░ą▓ąĖčéčī. ąØąŠ ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čŗą▓ąŠą┤čŗ 14, 15 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąĖą┐ą░čÅčéčī ą║ +5ąÆ.
ąÆ čüą╗čāčćą░ąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą║ąŠąĮčéčĆąŠą╗čÅ ąĮą░ą┤ čĆą░ą▒ąŠč鹊ą╣ čłą░ą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┤čĆčāą│ąĖą╝ąĖ (ą▓ąĮąĄčłąĮąĖą╝ąĖ) čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą▓ čüčģąĄą╝ąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮčŗ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą▓čŗčģąŠą┤čŗ ąĮą░ čüčéą░čĆčłąĖčģ ą┐ąĖąĮą░čģ ą┐ąŠčĆčéą░ D ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąØą░ ą▓čŗą▓ąŠą┤ąĄ PD7 «step» č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ čłą░ą│ąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ (ą╝ąŠąČąĄčé ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čüč湥čéčćąĖą║ą░ čłą░ą│ąŠą▓). ąÆčŗą▓ąŠą┤ PD6 «rewers» – čüąĖą│ąĮą░ą╗ čĆąĄą▓ąĄčĆčüą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ (ą╗ąŠą│. 0 - ą▓čĆą░čēąĄąĮąĖąĄ ą▓ą┐čĆą░ą▓ąŠ, ą╗ąŠą│. 1 – ą▓čĆą░čēąĄąĮąĖąĄ ą▓ą╗ąĄą▓ąŠ). ą¤čĆąĖ ąŠą▒ąĮčāą╗ąĄąĮąĖąĖ (čüą▒čĆąŠčüąĄ) ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ - čĆąĄą│ąĖčüčéčĆą░ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čłą░ą│ąŠą▓, ąĮą░ ą▓čŗą▓ąŠą┤ąĄ PD5 č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü «reset». ąŁčéąĖ ą▓čŗčģąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
ąŻą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮą░ą┐ąĖčüą░ąĮą░ ąĮą░ čÅąĘčŗą║ąĄ ąÉčüčüąĄą╝ą▒ą╗ąĄčĆ. ążą░ą╣ą╗ ą┐čĆąŠčłąĖą▓ą║ąĖ ą┐čĆąĖą╗ą░ą│ą░ąĄčéčüčÅ. ąÜčĆąŠą╝ąĄ čŹč鹊ą│ąŠ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čäčīčÄąĘčŗ: CKSEL0=0, CKSEL1=1, CKSEL2=0, CKSEL3=0, SUT0=0, SUT1=1, SKOPT=1.
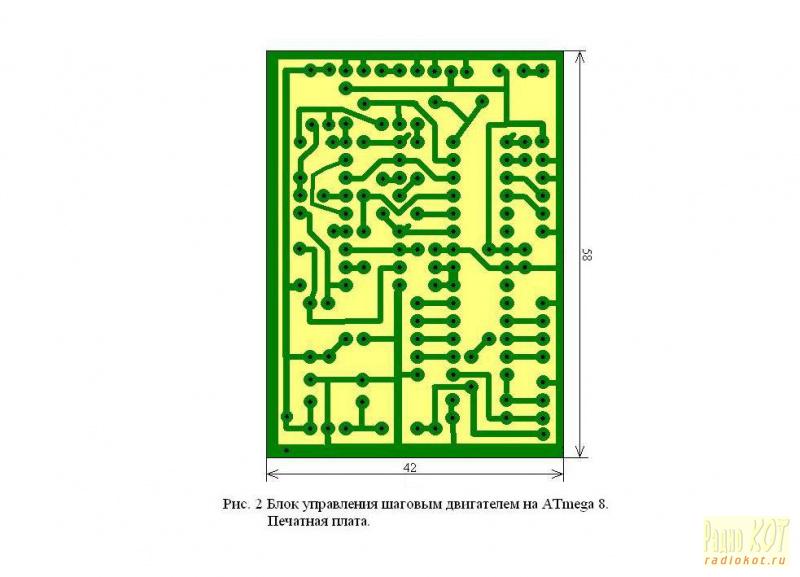 ą¤ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░ ą▒ą╗ąŠą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĘąŠą▒čĆą░ąČąĄąĮą░ ąĮą░ čĆąĖčü. 2. ą×ąĮą░ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮą░ ąĖąĘ ąŠą┤ąĮąŠčüč鹊čĆąŠąĮąĮąĄą│ąŠ č乊ą╗čīą│ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čüč鹥ą║ą╗ąŠč鹥ą║čüč鹊ą╗ąĖčéą░ čĆą░ąĘą╝ąĄčĆą░ą╝ąĖ 42 × 58 ą╝ą╝. ąÆ ą┐čĆąĖą║čĆąĄą┐ą╗ąĄąĮąĮąŠą╝ čäą░ą╣ą╗ąĄ čü čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ .lay ą┐čĆąĖą╗ą░ą│ą░ąĄčéčüčÅ čĆąĖčüčāąĮąŠą║ ą┤ą╗čÅ «ą╗ą░ąĘąĄčĆąĮąŠ-čāčéčĹȹĮąŠą╣» č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖčÅ ą┐ą╗ą░čéčŗ. ąĀą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ 菹╗ąĄą╝ąĄąĮč鹊ą▓ čüčģąĄą╝čŗ ąĮą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥 ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ 3.
 ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ – čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆą░ DA1, ą║ ąĮąĄą╣, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąĖą║čĆčāčéąĖčéčī čĆą░ą┤ąĖą░č鹊čĆ ą┐ą╗ąŠčēą░ą┤čīčÄ ąĮąĄ ą╝ąĄąĮąĄąĄ 4 čüą╝². ąĪąŠą▒čĆą░ąĮąĮą░čÅ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ąĮą░ č乊č鹊. 1 ąĖ č乊č鹊. 2.
  ąÜą░ą║ čāąČąĄ ąŠčéą╝ąĄčćą░ą╗ąŠčüčī, ą╗ąŠą│ąĖč湥čüą║ąĖąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ SN75452 ą╝ąŠąČąĮąŠ ąĘą░ą╝ąĄąĮąĖčéčī čĆčāčüčüą║ąĖą╝ ą░ąĮą░ą╗ąŠą│ąŠą╝ - ąÜ155ąøąÉ18. ąĀą░ąĮčīčłąĄ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą▓ čüčéą░čĆčŗčģ ą┐čÅčéąĖą┤čÄą╣ą╝ąŠą▓čŗčģ čäą╗ąŠą┐ą┐ąĖ ą┤ąĖčüą║ąŠą▓ąŠą┤ą░čģ ą▓ą╝ąĄčüč鹥 čü ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝čŗą╝ čłą░ą│ąŠą▓čŗą╝ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝.
ą¤čĆąĄą┤ą╗ą░ą│ą░ąĄą╝čŗą╣ ą▒ą╗ąŠą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ čü 菹╗ąĄą║čéčĆąŠą╝ąĄčģą░ąĮąĖč湥čüą║ąĖą╝ ą┐čĆąĖą▓ąŠą┤ąŠą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, čā ą╝ąĄąĮčÅ ą┤ą▓ą░ čéą░ą║ąĖčģ ą╝ąŠą┤čāą╗čÅ čü čłą░ą│ąŠą▓čŗą╝ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅą╝ąĖ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠ čāą┐čĆą░ą▓ą╗čÅčÄčé ą▓ąĖą┤ąĄąŠą║ą░ą╝ąĄčĆąŠą╣ ąĮą░ą▒ą╗čÄą┤ąĄąĮąĖčÅ čü čāą┤ą░ą╗ąĄąĮąĮčŗą╝ ą┤ąŠčüčéčāą┐ąŠą╝ ą┐ąŠ ą┤ą▓čāą╝ ąŠčüčÅą╝ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ą×ą┤ąĖąĮ ą╝ąŠč鹊čĆ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčé ą║ą░ą╝ąĄčĆčā ą┐ąŠ ąŠčüąĖ ąź, ą┤čĆčāą│ąŠą╣ – ą┐ąŠ ąŠčüąĖ Y (č乊č鹊. 3).
 ąÆąĖą┤ąĄąŠčĆąŠą╗ąĖą║ ąŠ čĆą░ą▒ąŠč鹥 ą┤ąĄą▓ą░ą╣čüą░ ą╝ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░: https://www.youtube.com/watch?v=Iz-2bfWMlHs
ążą░ą╣ą╗čŗ: ąÆčüąĄ ą▓ąŠą┐čĆąŠčüčŗ ą▓ ążąŠčĆčāą╝.
|
|
|||||||||||||||
 |
 |


 |
||||
|
|
||||
ąĀą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüą░ą╣čéą░ ą┐čĆąŠą▓ąĄčĆąĄąĮą░ ą▓ ą▒čĆą░čāąĘąĄčĆą░čģ:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
ąÉą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ 菹║čĆą░ąĮą░ ąŠčé 1280čģ1024 ąĖ ą▓čŗčłąĄ.
ą¤čĆąĖ ą╝ąĄąĮčīčłąĖčģ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ ą┐čĆąŠą║čĆčāčéą║ąĖ.
ą¤ąŠ ą▓čüąĄą╝ ą▓ąŠą┐čĆąŠčüą░ą╝ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ąÜąŠčéčā: kot@radiokot.ru
©2005-2024