 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ. ąØą░čćą░ą╗ąŠ. STM32.
ąÉą▓č鹊čĆ: ąÉą╗ąĄą║čüą░ąĮą┤čĆ ąĪą║ą░ą╗ą┤čāčåą║ąĖą╣, scelikr@gmail.com ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ ą┤ą╗čÅ ą║ąŠčéčÅčé ąÆčüąĄą╝ ą£čÅčā, ą║ąŠčéą░ąĮčŗ :) ąÜą░ą║-č鹊 čĆą░ąĘ ąŠčé ą╝ąĄąĮčÅ čāčłą╗ą░ ą║ąŠčłą║ą░ :( ąØčā ąĖ č湥ą╝ ą▓ą░ą╗ąĄčĆčīčÅąĮą║čā ą╗ąŠą┐ą░čéčī, čÅ čĆąĄčłąĖą╗ ąĘą░ąĮčÅčéčīčüčÅ ą┤ąĄą╗ąŠą╝, čéą░ą║ čüą║ą░ąĘą░čéčī «ąĮą░ ą▒ą╗ą░ą│ąŠ ąĀąŠą┤ąĖąĮąĄ». ąöą░ą▓ąĮąŠ čāąČ čģąŠč鹥ą╗ čåąĖčäčĆąŠą▓čŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ąĘą░ąĮčÅčéčīčüčÅ, ą┤ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĮąĄ ą▒čŗą╗ąŠ (čüą░ą╝ąĖ ą┐ąŠąĮąĖą╝ą░ąĄč鹥, č鹊 čüą┐ą░čéčī, č鹊 čü ą║ąŠčłą║ąŠą╣ ą┐ąŠ ą║čĆčŗčłą░ą╝ ą│čāą╗čÅčéčī), ą░ čéčāčé ą║ą░ą║ čĆą░ąĘ ą▓čĆąĄą╝čÅ-č鹊 ąĖ ą┐ąŠčÅą▓ąĖą╗ąŠčüčī. ąØčā-čü ąĮą░čćąĮčæą╝..) ąÆčüčæ ą║ą░ą║ ąŠą▒čŗčćąĮąŠ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą▓čŗą▒ąŠčĆą░. ąØčā ą▓čĆąŠą┤ąĄ ą▓čŗą▒ąŠčĆ-č鹊 ąĮąĄą▒ąŠą╗čīčłąŠą╣ PIC, ą┤ą░ AVR. ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ ą╝ąĮąĄ ą║ą░ą║-č鹊 ą▒ąŠą╗čīčłąĄ ą┐čĆąĖą│ą╗čÅąĮčāą╗ąĖčüčī. ąØčāąČąĄąĮ ą▒čŗą╗ ąĄčēčæ ąĖ USB ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ąĘą░ ąĮąĄąĖą╝ąĄąĮąĖąĄą╝ ą┤čĆčāą│ąĖčģ ą┐ąŠčĆč鹊ą▓ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ, ąŠčé čåąĄąĮčŗ ą║ąŠč鹊čĆąŠą│ąŠ čā ą╝ąĄąĮčÅ čćčāčéčī čģą▓ąŠčüčé ąĮąĄ ąŠčéą▓ą░ą╗ąĖą╗čüčÅ. ąĢčēčæ Arduino ąĄčüčéčī - ąĘą▓ąĄčĆčæą║ čéą░ą║ąŠą╣. ąĢą│ąŠ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┐ąŠ USB ą╝ąŠąČąĮąŠ. ąØčā, ą┤čāą╝ą░čÄ, "č鹊 čćč鹊 ą┤ąŠą║č鹊čĆ ą┐čĆąŠą┐ąĖčüą░ą╗". ąÆ čüąĄą╗ąĄ ąĮą░čłąĄą╝ ąĄą│ąŠ č鹊ą╗čīą║ąŠ č湥čĆąĄąĘ ąĖąĮč鹥čĆąĮąĄčé-ą╝ą░ą│ą░ąĘąĖąĮ ą┤ąŠčüčéą░čéčī ą╝ąŠąČąĮąŠ. ąØą░čłčæą╗, ą│ą┤ąĄ ą┐ąŠ-ą▓čŗą│ąŠą┤ąĮąĄą╣, čćčāčéčī ąĮąĄ ą║čāą┐ąĖą╗ ąĖ... ą×ą¤ąÉ! ąĪą╝ąŠčéčĆčÄ - STM32VL-Discovery. ą¦č鹊 ąĘą░ ąĘą▓ąĄčĆčī čéą░ą║ąŠą╣? ąźą╝, STM32.. ą¦č鹊-č鹊 čüą╗čŗčłą░ą╗ ą║čĆą░ąĄą╝ čāčģą░.. ąÉ ąŠčé čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ čāčüčŗ ą┤čŗą▒ąŠą╝, č湥čüčéąĮąŠ! ąÉ ą╗ą░ą┐-č鹊 čā ąĮąĄčæ čüą║ąŠą╗čīą║ąŠ!
ąśčéą░ą║, ą┐ąŠą┐ąŠčĆčÅą┤ą║čā:
ąÉ čćč鹊 ą┤ą░ą╗čīčłąĄ? ąÆ STM32VL-Discovery ąĄčüčéčī ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ/ąŠčéą╗ą░ą┤čćąĖą║, ą║ąŠč鹊čĆčŗą╣ ą╗čæą│ą║ąĖą╝ ą┤ą▓ąĖąČąĄąĮąĖąĄą╝ ą╗ą░ą┐čŗ (čüąĮčÅčéąĖąĄą╝ ą┐ąĄčĆąĄą╝čŗč湥ą║) ą╝ąŠąČąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĖ ąŠčéą╗ą░ąČąĖą▓ą░čéčī (ąŠčéą╗ą░ą┤ą║ą░ ąŠč湥ąĮčī čāąČ ą▓ąĄčēčī ą┐ąŠą╗ąĄąĘąĮą░čÅ, ąĮąŠ ąŠą▒ čŹč鹊ą╝ čćčāčéčī ą┐ąŠąĘąČąĄ) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM32 ąĘą░ ą┐čĆąĄą┤ąĄą╗ą░ą╝ąĖ ą┐ą╗ą░čéčŗ. ąĪ Arduino čéą░ą║ąŠąĄ ąĮąĄ ą┐čĆąŠą║ą░čéąĖčé. ąóąŠ ąĄčüčéčī ąĖčüą┐ąŠą╗čīąĘčāčÅ STM32VL-Discovery ą╝čŗ ąĖ ą┤ąĄąĮčīą│ąĖ 菹║ąŠąĮąŠą╝ąĖą╝ ąĖ ą┐ąŠą╗čāčćą░ąĄą╝ ą▒ąŠą╗čīčłčāčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖ čüą▓ąŠą▒ąŠą┤čā čéą▓ąŠčĆč湥čüčéą▓ą░ :) ąöą░ ąĖ čüą░ą╝ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM32 ą▓čŗą│ą╗čÅą┤čÅčé ą┐čĆąĖą▓ą╗ąĄą║ą░č鹥ą╗čīąĮąĄą╣ ąŠčüčéą░ą╗čīąĮčŗčģ:
ąÉ ąĄčēčæ STM32 32-čģ čĆą░ąĘčĆčÅą┤ąĮčŗąĄ, ą░ čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ čü 32-čģ ą▒ąĖčéąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ąĘą░ ąŠą┤ąĖąĮ čéą░ą║čé. AVR ąĖ PIC čŹčéąĖą╝ ąĮąĄ ą┐ąŠčģą▓ą░čüčéą░čÄčéčüčÅ.
ąØčā čćč鹊, ą║ąŠčéą░ąĮčŗ, čāą▒ąĄą┤ąĖą╗? ąóąŠą│ą┤ą░ ąĮą░čćąĮčæą╝ ą║čāčĆčü ą╝ąŠą╗ąŠą┤ąŠą│ąŠ ą▒ąŠą╣čåą░ čåąĖčäčĆąŠą▓ąĖą║ą░!) ąÜą░ą║ ąŠąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé? ąśąĘ č湥ą│ąŠ čüąŠčüč鹊ąĖčé? ą¦č鹊 čāą╝ąĄąĄčé? ąÜą░ą║ ąĖąĘą▓ąĄčüčéąĮąŠ, ą▓čüąĄ ą║ąŠčéčŗ ąŠč湥ąĮčī ą╗čÄą▒ąŠąĘąĮą░č鹥ą╗čīąĮčŗąĄ, ą░ čĆą░ą┤ąĖąŠą║ąŠčéčŗ ąŠčüąŠą▒ąĄąĮąĮąŠ! ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ - čŹč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čüąŠč湥čéą░čÄčēą░čÅ ą▓ čüąĄą▒ąĄ čäčāąĮą║čåąĖąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą┐ąĄčĆąĖč乥čĆąĖąĖ, ąĖą╝ąĄčÄčēą░čÅ ą×ąŚąŻ, flash ą┐ą░ą╝čÅčéčī. ąÜą░ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆ, č鹊ą╗čīą║ąŠ ą╝ąĄąĮčīčłąĄ! ą¤čĆąŠą▓ąĄą┤čæą╝ ą░ąĮą░ą╗ąŠą│ąĖčÄ: ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ čāą┐čĆą░ą▓ą╗čÅąĄčé ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░, ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ «ą┐čĆąŠčłąĖą▓ą║ą░», ą║ąŠč鹊čĆčāčÄ ą┐ąĖčłąĄč鹥 ąÆčŗ; ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ ą║ąŠą╝ą┐čīčÄč鹥čĆą░ čģčĆą░ąĮąĖčéčüčÅ ąĮą░ ąČčæčüčéą║ąŠą╝ ą┤ąĖčüą║ąĄ, «ą┐čĆąŠčłąĖą▓ą║ą░» ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▓ ąĄą│ąŠ flash ą┐ą░ą╝čÅčéąĖ; čäčāąĮą║čåąĖąĖ ą×ąŚąŻ čüčģąŠąČąĖ - čģčĆą░ąĮąĄąĮąĖąĄ ąĖąĘą╝ąĄąĮčÅčÄčēąĖčģčüčÅ ą┤ą░ąĮąĮčŗčģ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąÉ ąĄčēčæ čā ą£ąÜ ąĄčüčéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, čéą░ą║ąĖąĄ ą║ą░ą║ ąÉą”ą¤ ąĖ ą”ąÉą¤ ąĮą░ą┐čĆąĖą╝ąĄčĆ. ą£ąÜ ąŠą▒čēą░ąĄčéčüčÅ čü ą▓ąĮąĄčłąĮąĖą╝ ą╝ąĖčĆąŠą╝ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ ą╗ą░ą┐ ąĮą░ ąĄą│ąŠ ą║ąŠčĆą┐čāčüąĄ (ąĮąĄ čéą░ą║ąĖčģ ą║ą░ą║ čā ą║ąŠč鹊ą▓, ą║ąŠąĮąĄčćąĮąŠ, ą░ ą╝ąĄčéą░ą╗ą╗ąĖč湥čüą║ąĖčģ). ąØąŠ ąĮąĄ ą▓čüąĄ ąĖąĘ ąĮąĖčģ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, ąĄčüčéčī ą▓čŗą▓ąŠą┤čŗ ą┐ąĖčéą░ąĮąĖčÅ, ą▓čŗą▓ąŠą┤ čüą▒čĆąŠčüą░, ą▓čŗą▓ąŠą┤čŗ ą┐ąĖčéą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ą▓čŗą▓ąŠą┤ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ. ąÉ č鹥, ą║ąŠč鹊čĆčŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą┤ąĄą╗čÅčéčüčÅ ąĮą░ ą│čĆčāą┐ą┐čŗ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ «ą┐ąŠčĆčéčŗ». ąÆčüąĄ čŹčéąĖ čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ 2-ą╝čÅ ą▒čāą║ą▓ą░ą╝ąĖ ąĖ čåąĖčäčĆąŠą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ PA1: P - ą┐ąŠčĆčé, ąÉ - ą┐ąŠčĆčé «ąÉ», 1 - ąĮąŠą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░. ąÆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐ąŠčĆčéčŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ą╗ąĖą▒ąŠ ąĮą░ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ ąĮą░ ą▓čŗčģąŠą┤, ą┐ąŠ ą▓ą░čłąĄą╝čā ąČąĄą╗ą░ąĮąĖčÄ. ąÆčŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░ ąĮą░čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ąĮą░ ą▓čģąŠą┤ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ą░čģ, ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą▓ąŠąĖą╝:
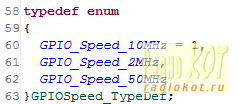
ąÉ čā ą┐ąŠčĆčéą░ ąĮą░čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ąĮą░ ą▓čŗčģąŠą┤ ą▓čŗą▓ąŠą┤čŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ čéą░ą║ąĖčģ čĆąĄąČąĖą╝ą░čģ:
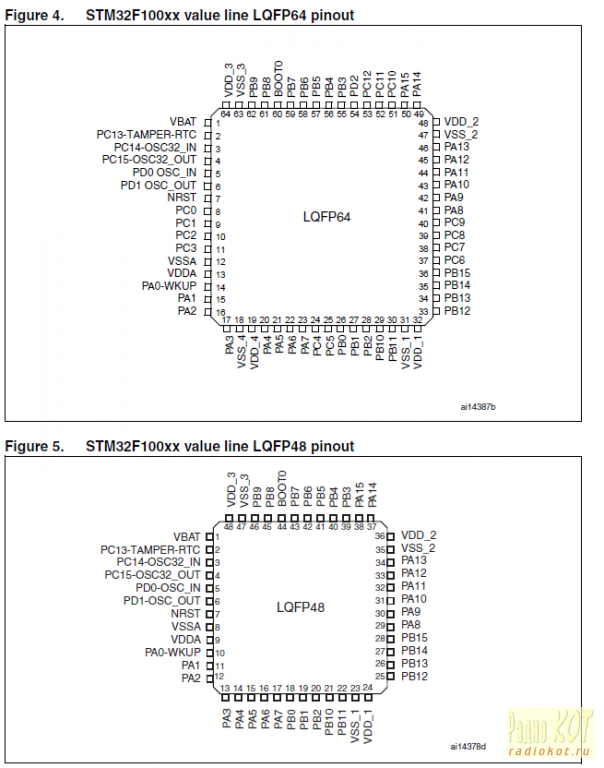
ąØąŠ ąĮąĄ ą▓čüąĄ ą▓čŗą▓ąŠą┤čŗ ą╝ąŠąČąĮąŠ ąĮą░ąĘąĮą░čćą░čéčī «ą║ą░ą║ ąĘą░čģąŠč湥čéčüčÅ». ąöą╗čÅ č鹊ą│ąŠ, čćč鹊 ą▒čŗ čāąĘąĮą░čéčī, čćč鹊 ą╝ąŠąČąĮąŠ, ą░ čćč鹊 ąĮąĄą╗čīąĘčÅ ąĮčāąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ (čéą░ą▒ą╗ąĖčåą░ 4) ąĖą╗ąĖ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ MicroXplorer. ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąŠčĆčéą░ ąĄą│ąŠ ąĮčāąČąĮąŠ čüąĮą░čćą░ą╗ą░ čéą░ą║čéąĖčĆąŠą▓ą░čéčī - ą┐ąŠą┤ą░ą▓ą░čéčī ąĮą░ ąĮąĄą│ąŠ čéą░ą║č鹊ą▓čŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ, čé.ą║. ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąŠąĮąĖ ąĮąĄ ą┐ąŠą┤ą░čÄčéčüčÅ ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ. ą£ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī čĆą░ąĘąĮčāčÄ čćą░čüč鹊čéčā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ - ą▒ąŠą╗čīčłąĄ čćą░čüč鹊čéą░ - ą▒čŗčüčéčĆąĄąĄ čĆą░ą▒ąŠčéą░čÄčé ą▓čģąŠą┤čŗ ąĖą╗ąĖ ą▓čŗčģąŠą┤čŗ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░, ąĮąŠ ąĖ ą▒ąŠą╗čīčłąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ. ąĢčēčæ ąĄčüčéčī ą▓čŗą▓ąŠą┤čŗ BOOT 0 ąĖ BOOT 1. ąŁčéąĖ ą▓čŗą▓ąŠą┤čŗ ąĮąĄ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ ą┐ąŠčĆčéą░ą╝, ąŠąĮąĖ čüą╗čāąČą░čé ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĘą░ą│čĆčāąĘą║ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąĢčüą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ BOOT 0 ą╗ąŠą│ąĖč湥čüą║ąĖą╣ ąĮąŠą╗čī (ą▓čŗą▓ąŠą┤ čüąŠąĄą┤ąĖąĮąĄąĮ čü ąŠą▒čēąĄą╣ č鹊čćą║ąŠą╣), č鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĘą░ą│čĆčāąČąĄąĮąĮčāčÄ ą▓ąŠ flash ą┐ą░ą╝čÅčéčī, čé.ąĄ. ąÆą░čłčā ą┐čĆąŠčłąĖą▓ą║čā. ąĢčüą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ BOOT 0 ą╗ąŠą│ąĖč湥čüą║ą░čÅ ąĄą┤ąĄąĮąĖčåą░ (ą▓čŗą▓ąŠą┤ čüąŠąĄą┤ąĖąĮąĄąĮ čü ą┐ąĖčéą░ąĮąĖąĄą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░), ą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ BOOT 1 ą╗ąŠą│ąĖč湥čüą║ąĖą╣ ąĮąŠą╗čī, č鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĄ ąÆą░čłčā ą┐čĆąŠčłąĖą▓ą║čā, ą░ ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╣ ąĮą░ ąĘą░ą▓ąŠą┤ąĄ ąĘą░ą│čĆčāąĘčćąĖą║. ąŚą░ą┐ąŠą╝ąĮąĖč鹥 čŹč鹊! ąÆčŗ ą▒čāą┤ąĄč鹥 čćą░čüč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čŹčéąĖą╝ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ą▒ąŠčéčŗ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ STM32! ąśąĮąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘą║ą░ ąĘą░ą┐ąĖčüą░ąĮąĮąŠą│ąŠ čü ąĘą░ą▓ąŠą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ - ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╣ čüą┐ąŠčüąŠą▒ ąĘą░ą┐ąĖčüą░čéčī/ąĖąĘą╝ąĄąĮąĖčéčī ą┐čĆąŠčłąĖą▓ą║čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąŁč鹊 ą▒čŗą▓ą░ąĄčé ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ ą▓ ą┐čĆąŠčłąĖą▓ą║ąĄ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ ą║ąŠč鹊čĆčŗą╝ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ąĖą╗ąĖ ą┐čĆąĖ ą┐čĆąŠčłąĖą▓ą║ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ąóą░ą║ čćč鹊 ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄ ą┐čĆąĖ ą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ (ąĖą╗ąĖ čģąŠčéčÅ ą▒čŗ BOOT 0) čĆą░čüą┐ąŠą╗ąŠą│ą░čéčī ą▓ čāą┤ąŠą▒ąĮąŠą╝ ą╝ąĄčüč鹥. ąÆąŠčé čĆą░ąĘąŠą▒čĆą░ą╗ąĖčüčī :) ąóąĄą┐ąĄčĆčī ąĘąĮą░ąĄą╝ čćč鹊 čéą░ą║ąŠąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ąĖąĘ č湥ą│ąŠ ąŠąĮ čüąŠčüč鹊ąĖčé. ąĪąĄą╣čćą░čü čāąĘąĮą░ąĄą╝ ąĄčēčæ ąŠ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąĄą╝čāą┤čĆąŠčüčéčÅčģ ąĖ ą┐ąĄčĆąĄą╣ą┤čæą╝ ą║ čüą░ą╝ąŠą╝čā ąĖąĮč鹥čĆąĄčüąĮąŠą╝čā - ą┐čĆą░ą║čéąĖą║ąĄ! ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠčłą░ą│ąŠą▓ąŠ. ą×ą┤ąĖąĮ čéą░ą║čé ą┐čĆąŠčåąĄčüčüąŠčĆą░ - ąŠą┤ąĖąĮ čłą░ą│ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą┐čāčüčéčī ą┐ąĄčĆąĄą╝ąĖą│ąĖą▓ą░ąĄčéčüčÅ ą║čĆą░čüąĮą░čÅ ąĖ ąĘąĄą╗čæąĮą░čÅ ą╗ą░ą╝ą┐ąŠčćą║ąĖ, ą┐ąŠą║ą░ ąØąĢ ąĮą░ąČą░čéą░ ą║ąĮąŠą┐ą║ą░. ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ą░ąČą┤ąŠą╣ ą╗ą░ą╝ą┐čŗ - 5 čüąĄą║čāąĮą┤. ąÆąŠčé ą░ą╗ą│ąŠčĆąĖčéą╝:
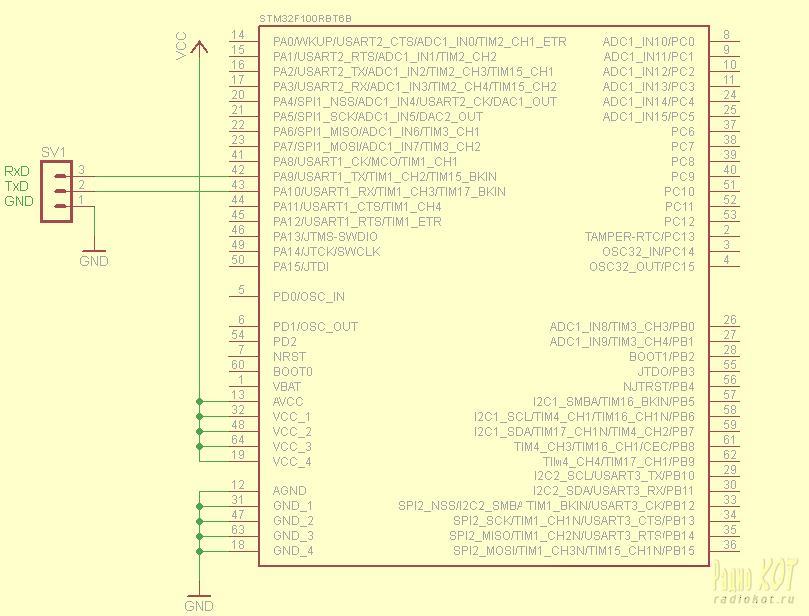
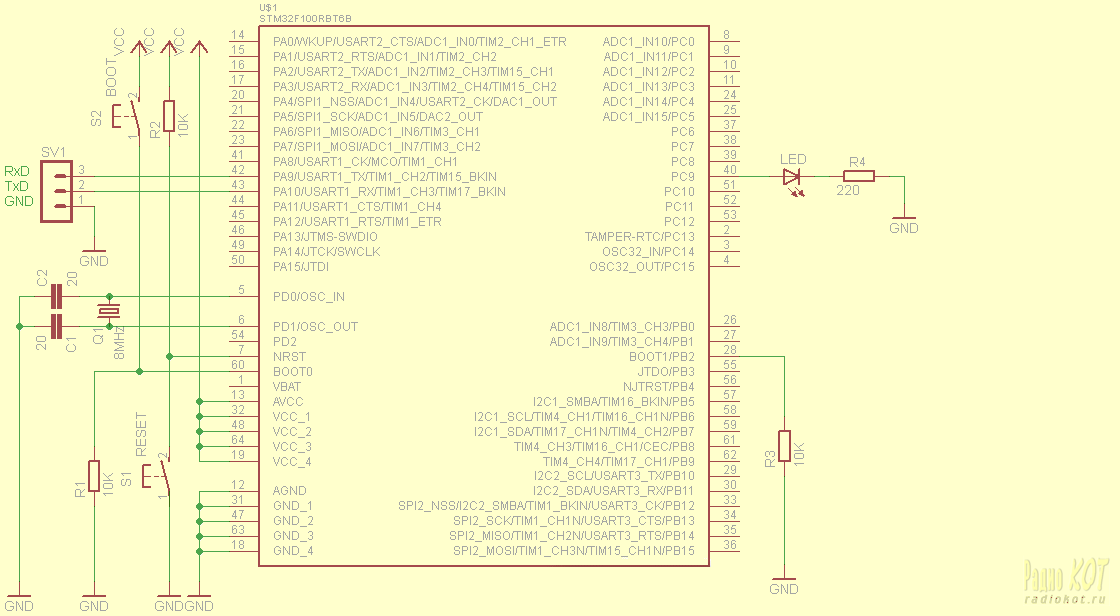
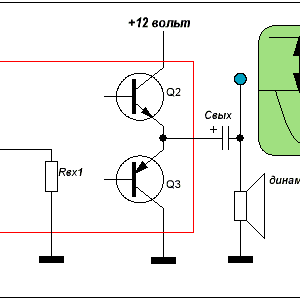
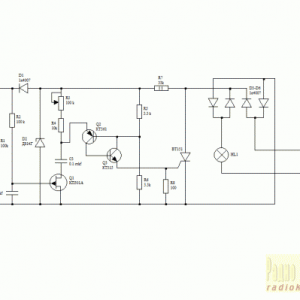
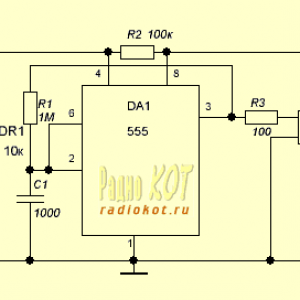
ąĪąóą×ą¤! ąÉ ąĄčüą╗ąĖ čÅ ąĮą░ąČą╝čā ą║ąĮąŠą┐ą║čā, ą┐ąŠą║ą░ ą│ąŠčĆąĖčé ą╗ą░ą╝ą┐ąŠčćą║ą░? ąóąŠ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤čæčé! ą¤ąŠč鹊ą╝čā čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠčłą░ą│ąŠą▓ąŠ, ą░ čłą░ą│ čü ą┐čĆąŠą▓ąĄčĆą║ąŠą╣ ąĮą░ąČą░čéąĖčÅ ą║ąĮąŠą┐ą║ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą╗ą░ą╝ą┐ąŠč湥ą║. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą░čÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąĄčĆą▓ą░čéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąĪą┤ąĄą╗ą░čéčī čŹč鹊 ą╝ąŠąČąĮąŠ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĖą╝ čüąŠą▒čŗčéąĖąĄą╝ (ąĮą░ąČą░čéąĖąĄ ą║ąĮąŠą┐ą║ąĖ, ąŠčéą┐čāčüą║ą░ąĮąĖąĄ ą║ąĮąŠą┐ą║ąĖ ą┐čĆąĖčæą╝ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐čĆ.) ąĖą╗ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ (ą┐ąŠ čéą░ą╣ą╝ąĄčĆčā ąĖą╗ąĖ ą┐čĆąĖčłą╗ąŠ ą▓čĆąĄą╝čÅ ą║ąŠčĆą╝ąĖčéčī ą║ąŠčéą░ ąĮą░ą┐čĆąĖą╝ąĄčĆ). ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čŹč鹊 čüą░ą╝ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, č鹊 ąĮą░čćąĖąĮą░ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░. ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘąĮčŗąĄ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą▓ąĖą┤ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, čŹčéąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ąĮąĖčÅ. ąÜąŠą│ą┤ą░ čŹč鹊čé čüą░ą╝čŗą╣ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą║ąŠąĮčćąĖčé čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā, ąŠčüąĮąŠą▓ąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░čćąĖąĮą░ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ čü č鹊ą│ąŠ ą╝ąĄčüčéą░, ą│ą┤ąĄ ą▒čŗą╗ą░ ą┐čĆąĄčĆą▓ą░ąĮą░. ąÆčüčéą░čæą╝ ąĮą░ ą╗ą░ą┐čŗ! ąØčā, ą║ąŠčéčÅčéą░, ą┐ąŠčĆą░ ą▓čüčéą░ą▓ą░čéčī ąĮą░ ą╗ą░ą┐čŗ! ąØą░ą┤ąĄčÄčüčī čā ąÆą░čü čāąČąĄ ąĄčüčéčī ąŠčéą╗ą░ą┤ąŠčćąĮą░čÅ ą┐ą╗ą░čéą░? ąśą╗ąĖ čģąŠčéčÅ ą▒čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ? ąØą░ą┤ąĄčÄčüčī ąĄčüčéčī :) ąÉ ąĄčüą╗ąĖ ąĮąĄčé, č鹊 ą▒ąĄąČąĖą╝ ą▓ ą╝ą░ą│ą░ąĘąĖąĮ! (ąĖ ąČąĄą╗ą░č鹥ą╗čīąĮąŠ ąĮąĄ ąĘą░ ą║ąŠą╗ą▒ą░čüąŠą╣. čģąŠčéčÅ...) ąÜą░ą║ąŠąĄ ąČąĄ čŹč鹊 čāč湥ąĮąĖąĄ ą▒ąĄąĘ ą┐čĆą░ą║čéąĖą║ąĖ? ą×čéą╗ąĖčćąĮąŠ ąĮą░ ą┐ąĄčĆą▓čŗčģ ą┐ąŠčĆą░čģ ąĖą╝ąĄčéčī ąŠčéą╗ą░ą┤ąŠčćąĮčāčÄ ą┐ą╗ą░čéčā, ąĮą░ą┐čĆąĖą╝ąĄčĆ STM32VL-Discovery, ąĮąŠ ąĄčüą╗ąĖ ąČą░ą▒ą░ ą┤čāčłąĖčé ąĖą╗ąĖ ą▓čüčæ-čéą░ą║ąĖ ąĮąĄčģą▓ą░čéą░ąĄčé ąĮą░ ą║ąŠą╗ą▒ą░čüčā, č鹊 ą╝ąŠąČąĮąŠ ąŠą▒ąŠą╣čéąĖčüčī ąĖ ąŠą┤ąĮąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ RS-232 ->UART (ąĮą░ą┐čĆ. MAX3232) ąĖą╗ąĖ USB ->UART (ąĮą░ą┐čĆ. FT232RL). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓ 100 čĆčāą▒ą╗ąĄą╣ ą╝ąŠąČąĮąŠ ą▓ą┐ąŠą╗ąĮąĄ čāą╗ąŠąČąĖčéčīčüčÅ, ąĮąŠ ą┐čĆąĖą┤čæčéčüčÅ ą┤ąĄą╗ą░čéčī ą┐ąĄčćą░čéąĮčāčÄ ą┐ą╗ą░čéčā ąĖ ą┐ą░čÅčéčī ą╝ąĖąĮąĖą╝čāą╝ 48 ą▓čŗą▓ąŠą┤ąŠą▓ čłąĖčĆąĖąĮąŠą╣ 0,3 ą╝ą╝ čü ąĘą░ąĘąŠčĆąŠą╝ 0,2 ą╝ą╝. ą» ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ą░ą╗. ąĪąĮą░čćą░ą╗ą░ ąĮčāąČąĮąŠ ąĄčüč鹥čüčéą▓ąĄąĮąĮąŠ ą┐čĆąĖą║ąŠčłą░čćąĖčéčī ąŠčéą╗ą░ą┤ąŠčćąĮčāčÄ ą┐ą╗ą░čéčā ąĖą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā. ąĢčüą╗ąĖ čā ąÆą░čü ąŠčéą╗ą░ą┤ąŠčćąĮą░čÅ ą┐ą╗ą░čéą░: ąĪ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ą┐ą╗ą░č鹊ą╣, ą║ąŠąĮąĄčćąĮąŠ ą┐čĆąŠčēąĄ. ąæąĄčĆčæą╝ čłąĮčāčĆąŠą║ Mini-USB ąĖ čüąŠąĄą┤ąĖąĮčÅąĄą╝ ą┐ą╗ą░čéčā čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝, ą▓čüąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠčüčéą░ą▓ąĖčéčīčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąŻą▓ąĖą┤ąĄčéčī STMicroelectronics STLink dongle ą▓ ą┤ąĖčüą┐ąĄčéč湥čĆąĄ čāčüčéčĆąŠą╣čüčéą▓ - čģąŠčĆąŠčłąĖą╣ ąĘąĮą░ą║! ąØčā ą░ ąĄčüą╗ąĖ čćč鹊-č鹊 ą┐ąŠčłą╗ąŠ ąĮąĄ čéą░ą║ ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓čŗčłą╗ąŠ - ąĮąĄ ąĮą░ą┤ąŠ čåą░čĆą░ą┐ą░čéčī ą┤ąĖą▓ą░ąĮ, ąĮčāąČąĮąŠ ą┐čĆąŠčüč鹊 ąĘą░ą╣čéąĖ čüčÄą┤ą░ ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī STM32 ST-LINK utility. ąØčā ą░ ąĄčüą╗ąĖ ąÆčŗ čüčćą░čüčéą╗ąĖą▓čŗą╣ ąŠą▒ą╗ą░ą┤ą░č鹥ą╗čī ą║ąŠą╝ą┐čīčÄč鹥čĆą░ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ Windows 8, č鹊 ą┐ąĄčĆąĄą┤ ą┐čĆąŠą▓ąĄą┤ąĄąĮąĖąĄą╝ ą▓čŗčłąĄąŠą┐ąĖčüą░ąĮąĮčŗčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī čéą░ą║: ą¤ą░čĆą░ą╝ąĄčéčĆčŗ -> ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠą╝ą┐čīčÄč鹥čĆą░ -> ą×ą▒čēąĖąĄ -> ą×čüąŠą▒čŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ąĘą░ą│čĆčāąĘą║ąĖ ąĖ ą▓čŗą▒čĆą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆ ą×čéą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┐ąŠą┤ą┐ąĖčüąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓. ąĢčüą╗ąĖ čā ąÆą░čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ: ąĢčüą╗ąĖ čā ąÆą░čü ąŠą┤ąĖąĮ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, č鹊 čā ąÆą░čü ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆčÅą╝čŗąĄ ą╗ą░ą┐čŗ. ąØąŠ čÅ ą▓ ąÆą░čü ąĮąĄ čüąŠą╝ąĮąĄą▓ą░čÄčüčī! ą¤ąĄčĆąĄą┤ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ąĄą│ąŠ ąĮčāąČąĮąŠ ą┐čĆąĖą┐ą░čÅčéčī ą║ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥. ąöą╗čÅ čŹč鹊ą│ąŠ ą║čĆąŠą╝ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖ ą┐čĆčÅą╝čŗčģ ą╗ą░ą┐ ąĮčāąČąĮą░ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą┐ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░. ąÉ čéčāčé čāąČ ąÆą░čłąĄ čéą▓ąŠčĆč湥čüčéą▓ąŠ. ąĀą░ą▒ąŠčćąĖą╣ ą╝ąĖąĮąĖą╝čāą╝ ąĮą░ čüčģąĄą╝ąĄ ąĮąĖąČąĄ: ąØąŠ čŹč鹊 ąĮąĄąĖąĮč鹥čĆąĄčüąĮčŗą╣ ą╝ąĖąĮąĖą╝čāą╝. ąöąŠą▒ą░ą▓čīč鹥 čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ ąĖ ą║ąĮąŠą┐ąŠą║ (ąĮąĄ ąĘą░ą▒čāą┤čīč鹥 ą┐čĆąŠ ą▓čŗą▓ąŠą┤čŗ BOOT), ąĮą░ą┐čĆąĖą╝ąĄčĆ čéą░ą║ ąÉ ą▓ąŠčé čü ą┐ą░ą╣ą║ąŠą╣ čŹč鹊ą╣ ą▒ą╗ąŠčģąĖ ą╝ąŠą│čāčé ą▓ąŠąĘąĮąĖą║ąĮčāčéčī ą┐čĆąŠą▒ą╗ąĄą╝čŗ. ąØąŠ čÅ ąĮą░ą┤ąĄčÄčüčī, ąĮąĄ ą▓ąŠąĘąĮąĖą║ąĮčāčé. ą» ąĮą░ą║ąŠčłą░čćąĖą╗čüčÅ ą┐ą░čÅčéčī ąĄčæ čüą▓ąŠąĖą╝ ą╗čÄą▒ąĖą╝čŗą╝ čüąŠą▓ąĄčéčüą║ąĖą╝ 25 ąÆčé ą┐ą░čÅą╗čīąĮąĖą║ąŠą╝ čü čłąĖčĆąĖąĮąŠą╣ ąČą░ą╗ą░ ą▓ 3/4 čłąĖčĆąĖąĮčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąŻ ą╝ąĄąĮčÅ ą▒ąŠą╗čīčłąĄ ą┐čĆąŠą▒ą╗ąĄą╝ čü ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ... ąĮčā čéčāčé čāąČ čā ą║ą░ąČą┤ąŠą│ąŠ čüą▓ąŠčÅ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ. ąś ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī ąĮą░ UART ą┐ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą║ č鹊ą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ, ą║ąŠč鹊čĆčāčÄ ą║čāą┐ąĖą╗ąĖ. ąĪąŠąĄą┤ąĖąĮčÅąĄą╝ ą▓čŗą▓ąŠą┤čŗ TxD ąĖ RxD ąĮą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥 čü ą▓čŗą▓ąŠą┤ą░ą╝ąĖ RxD ąĖ TxD čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ą░. ąØąĄ ąĘą░ą▒čŗą▓ą░ąĄą╝ ą┐čĆąŠ ąŠą▒čēčāčÄ č鹊čćą║čā ąĖ ą┐ąĖčéą░ąĮąĖąĄ ą▓čüąĄą│ąŠ čŹč鹊ą│ąŠ.
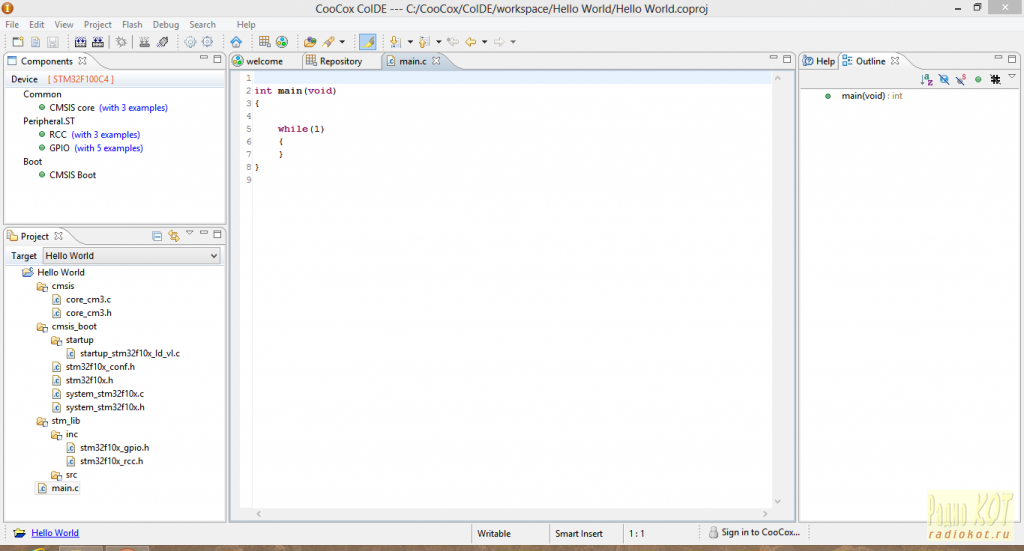
ąØčā ą▓ąŠčé, č鹊ą▓ą░čĆąĖčēąĖ, ąĖ ą┐čĆąĖą║ąŠčłą░čćąĖą╗ąĖ. ąöą░ą╗čīčłąĄ ą▒čāą┤ąĄą╝ ą┐ąŠą▓ąĄą╗ąĄą▓ą░čéčī čŹč鹊ą╣ čłą░ą╣čéą░ąĮ-ą╝ą░čłąĖąĮąŠą╣ :) ąÆčŗą▒ąŠčĆ ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ ą¤ą× ą¤ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝čŗ ą▒čāą┤ąĄą╝ čüčĆąĄą┤ąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ CooCox IDE, ąĮąŠ čŹč鹊 ąĮąĄ ą┐čĆąŠčüč鹊 čéą░ą║, ą░ ą┐ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ ą┐čĆąĖčćąĖąĮą░ą╝:
ąĪčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ - čŹč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ą║ąŠą┤ą░, ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ, ąŠčéą╗ą░ą┤čćąĖą║ ą▓ ąŠą┤ąĮąŠą╝. ąŻą┤ąŠą▒ąĮąĄąĮčīą║ąŠ :) ąØąŠ ąĄčüą╗ąĖ ą║ą░ą║ąŠą╝čā-č鹊 čüčāčĆąŠą▓ąŠą╝čā ą¦ąĄą╗čÅą▒ąĖąĮčüą║ąŠą╝čā ą║ąŠčéčā čāą┤ąŠą▒ąĮąĄąĄ ą┐ąĖčüą░čéčī ą║ąŠą┤ (ą▓ ą▒ą╗ąŠą║ąĮąŠč鹥 ąĮą░ą┐čĆąĖą╝ąĄčĆ), ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĖ ą┐čĆąŠčłąĖą▓ą░čéčī čĆą░ąĘąĮčŗą╝ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ąĖ - čÅ ąĮąĄ ą┐čĆąŠčéąĖą▓, č鹊ą│ą┤ą░ ąÆą░ą╝ ą┐čĆąĖą│ąŠą┤ąĖčéčüčÅ STM32 ST-LINK utilit ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąźąŠąĘčÅąĖąĮ ą▒ą░čĆąĖąĮ, ą║ą░ą║ ą│ąŠą▓ąŠčĆąĖčéčüčÅ. ąŁčéą░ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ą╝ąĮąŠą│ąĖą╝ ąĖąĘą▓ąĄčüčéąĮąŠą╝ Eclipse. ąśčéą░ą║:
ąĢčüą╗ąĖ čā ąÆą░čü ą▓ą░čĆąĖą░ąĮčé ą▒ąĄąĘ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ/ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░, č鹊 ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ ą£ąÜ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą║ą░ Flash Loader Demonstrator ą║ąŠč鹊čĆą░čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĘą┤ąĄčüčī ąØą░čģąŠą┤ąĖą╝ ąŠą▒čēąĖą╣ čÅąĘčŗą║ ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┐ąĖčüą░čéčī čüą▓ąŠčÄ ą┐ąĄčĆą▓čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĮčāąČąĮąŠ ąĮą░ą╣čéąĖ čü ą£ąÜ ąŠą▒čēąĖą╣ čÅąĘčŗą║. ąÆčĆčÅą┤ ą╗ąĖ ąŠąĮ ą▒čāą┤ąĄčé čāčćąĖčéčī ąĮą░čł čÅąĘčŗą║, ą┐ąŠ čŹč鹊ą╝čā ą┐čĆąĖą┤ąĄčéčüčÅ ą▓čŗčāčćąĖčéčī (ą░ ą╝ąŠąČąĄčé ą┐čĆąŠčüč鹊 ą▓čüą┐ąŠą╝ąĮąĖčéčī) čÅąĘčŗą║ ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą╝čŗ ą▒čāą┤ąĄą╝ ąŠą▒čēą░čéčīčüčÅ čü ą£ąÜ, čŹč鹊 ąĪąĖ. ą¤ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ ąĮą░ą╝ č鹊ą╗čīą║ąŠ ąŠčüąĮąŠą▓čŗ (čüąŠčüčéą░ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čäčāąĮą║čåąĖąĖ, ąŠą┐ąĄčĆą░č鹊čĆčŗ). ąĢčüą╗ąĖ čÅąĘčŗą║ čŹč鹊čé ąĘąĮą░ąĄč鹥, č鹊 ą╝ąŠąČąĄč鹥 čüčĆą░ąĘčā ą┐ąĄčĆąĄą╣čéąĖ ą║ ą┐čāąĮą║čéčā «ą¤ąĄčĆą▓ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░», ąĮčā ą░ ąĮąĄąĘąĮą░čÄčēąĖčģ čÅ ą▓ą▓ąĄą┤čā ą▓ ą║čāčĆčü ą┤ąĄą╗ą░. ą¤čĆąŠąĄą║čé čüąŠčüč鹊ąĖčé ąĖąĘ čäą░ą╣ą╗ąŠą▓ čü čĆą░čüčłąĖčĆąĄąĮąĖčÅą╝ąĖ .c ąĖ .h. ąÆ ą┐ąĄčĆą▓čŗčģ ąĮą░čģąŠą┤čÅčéčüčÅ čäčāąĮą║čåąĖąĖ ą▓ąŠ ą▓č鹊čĆčŗčģ ąĮą░ąĘą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čäčāąĮą║čåąĖą╣ ąĖ ą║ąŠąĮčüčéą░ąĮčéčŗ ąĮą░ą┐čĆąĖą╝ąĄčĆ. ąóą░ą║ čāąČ ąĘą░ą▓ąĄą┤ąĄąĮąŠ. ąĪą░ą╝čŗą╣ ą│ą╗ą░ą▓ąĮčŗą╣ čäą░ą╣ą╗, ą▓ ą║ąŠč鹊čĆąŠą╝ ąĮą░čģąŠą┤ąĖčéčüčÅ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ main.c. ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čäčāąĮą║čåąĖą╣ ąĮčāąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čü čŹčéąĖą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ. ą¤ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ąŠąĮąĖ ąĘą░ą┐ąĖčüčīčÄ #include "ąĮą░ąĘą▓ą░ąĮąĖąĄ_ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ" ąĮčā ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĄčüč鹥čüčéą▓ąĄąĮąĮąŠ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ ą┐čĆąŠąĄą║č鹥. ą¤ąŠą┤ą║ą╗čÄčćą░čÄčé ąĖčģ ą▓ čüą░ą╝ąŠą╝ ąĮą░čćą░ą╗ąĄ čäą░ą╣ą╗ą░. ążčāąĮą║čåąĖąĖ - čŹč鹊 čüą▓ąŠąĄąŠą▒čĆą░ąĘąĮą░čÅ čćą░čüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąÆąŠąŠą▒čēąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čüąŠčüč鹊ąĖčé ąĖąĘ ąŠą┤ąĮąŠą╣ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čäčāąĮą║čåąĖą╣. ążčāąĮą║čåąĖčÅ ąĖą╝ąĄąĄčé ą▓ąĖą┤: čéąĖą┐_ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą╣_ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĖą╝čÅ_čäčāąĮą║čåąĖąĖ (čéąĖą┐_ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣) ąÆ čäčāąĮą║čåąĖčÄ ą╝ąŠąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī ą║ą░ą║čāčÄ-ąĮąĖą▒čāą┤čī ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ, čäčāąĮčåąĖčÅ ąĄčæ ąŠą▒čĆą░ą▒ąŠčéą░ąĄčé ąĖ ą▓ąĄčĆąĮčæčé ą║ą░ą║ąŠąĄ-ąĮąĖą▒čāą┤čī ąĘąĮą░č湥ąĮąĖąĄ. ą×č湥ąĮčī čāą┤ąŠą▒ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ą┐ąŠą▓č鹊čĆčÅčÄčēąĖčģčüčÅ ą┤ąĄą╣čüčéą▓ąĖą╣, č湥ą╝ ą┐ąĖčüą░čéčī ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą║čāčüąŠą║ ą║ąŠą┤ą░, ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ą▓ čäčāąĮą║čåąĖčÄ ąĖ ą┐ąŠą╗čāčćą░čéčī ąŠą▒čĆą░čéąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ, ąĄčæ ąĮčāąČąĮąŠ ąŠą▒čŖčÅą▓ąĖčéčī ą▓ čüą░ą╝ąŠą╝ ąĮą░čćą░ą╗ąĄ čäą░ą╣ą╗ą░. ąöąĄą╗ą░čÄčé čŹč鹊 ą▓ čéą░ą║ąŠą╝ ą▓ąĖą┤ąĄ: čéąĖą┐_ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą╣_ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĖą╝čÅ_čäčāąĮą║čåąĖąĖ (čéąĖą┐_ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣); ąÉčģ, ą┤ą░, ąĘą░ą▒čŗą╗ čüą░ą╝ąŠąĄ ą│ą╗ą░ą▓ąĮąŠąĄ! ąÆ ą║ąŠąĮčåąĄ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī č鹊čćą║ą░ čü ąĘą░ą┐čÅč鹊ą╣! ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓čĆąĄą╝ąĄąĮąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░, ąŠąĮą░ ą┐čĆąŠčüč鹊 čéčÅąĮąĄčé ą║ąŠčéą░ ąĘą░ čģą▓ąŠčüčé ą▓čĆąĄą╝čÅ), č鹊 čéąĖą┐ čāą║ą░ąĘčŗą▓ą░čÄčé void. ą¤čĆąĖ ąĘą░ą┐čāčüą║ąĄ, ą┐ąĄčĆą▓ąŠą╣ ą▓čüąĄą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čäčāąĮą║čåąĖčÅ main(). ąØčā čü čäčāąĮą║čåąĖčÅą╝ąĖ ą▓čĆąŠą┤ąĄ čĆą░ąĘąŠą▒čĆą░ą╗ąĖčüčī, ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄ ą┐čĆąĖą┤čæčé č鹊ą╗čīą║ąŠ čü ą┐čĆą░ą║čéąĖą║ąŠą╣. ąÆčŗčłąĄ čÅ čāą┐ąŠą╝ąĖąĮą░ą╗ čéąĖą┐ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣. ąÆčüąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘąĮčŗčģ čéąĖą┐ąŠą▓, ą▓ąŠčé ąŠčüąĮąŠą▓ąĮčŗąĄ:
ąĪčéčĆąŠą║čā (čüą╗ąŠą▓ąŠ, ą┐čĆąĄą┤ą╗ąŠąČąĄąĮąĖąĄ) ą╝ąŠąČąĮąŠ ą┐čĆąĄą┤čüčéą░ą▓ąĖčéčī ą║ą░ą║ ą╝ą░čüčüąĖą▓ ąĖąĘ čüąĖą╝ą▓ąŠą╗ąŠą▓ čéąĖą┐ą░ char. ąØą░ą┐čĆąĖą╝ąĄčĆ: char stroka[5] = "ąĪą╗ąŠą▓ąŠ"; ąŚą┤ąĄčüčī ą║ą▓ą░ą┤čĆą░čéąĮčŗčģ čüą║ąŠą▒ą║ą░čģ - ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ čüčéčĆąŠą║ąĄ, «stroka» - ąĮą░ąĘą▓ą░ąĮąĖąĄ ą╝ą░čüčüąĖą▓ą░. ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĄčæ ąĮčāąČąĮąŠ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąŠą▒čŖčÅą▓ąĖčéčī. (ą┐čĆąŠčüč鹊 čāą║ą░ąĘą░čéčī čéąĖą┐ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĖ ąĖą╝čÅ) ąöą░ą╗čīčłąĄ ą┐ąŠ ą┐ą╗ą░ąĮčā ąŠą┐ąĄčĆą░č鹊čĆčŗ. ą×ą┐ąĄčĆą░č鹊čĆčŗ - čüąĖą╝ą▓ąŠą╗čŗ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ ą║ąŠč鹊čĆčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤čÅčéčüčÅ ą║ą░ą║ąĖąĄ ą╗ąĖą▒ąŠ ąŠą┐ąĄčĆą░čåąĖąĖ ąĮą░ą┤ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ąĖ.
ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓čŗčĆą░ąČąĄąĮąĖąĄ a=b+c ąĘąĮą░čćąĖčé ą┐čĆąĖčüą▓ąŠąĖčéčī ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ a ąĘąĮą░č湥ąĮąĖąĄ čüčāą╝ą╝čŗ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ b ąĖ c.
ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓čŗčĆą░ąČąĄąĮąĖąĄ a++ ąĘąĮą░čćąĖčé čāą▓ąĄą╗ąĖčćąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ a ąĮą░ 1 (č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ a=a+1)
ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓čŗčĆą░ąČąĄąĮąĖąĄ a<b čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĖčüčéąĖąĮąĮčŗą╝, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ a ą╝ąĄąĮčīčłąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ b ąĖ ą╗ąŠąČąĮčŗą╝, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖčÅ čĆą░ą▓ąĮčŗ ąĖą╗ąĖ a ą▒ąŠą╗čīčłąĄ b. ąÆčŗčĆą░ąČąĄąĮąĖąĄ a==b ąĖčüčéąĖąĮąĮąŠ ąĄčüą╗ąĖ a čĆą░ą▓ąĮąŠ b ąĖ ą╗ąŠąČąĮąŠ, ąĄčüą╗ąĖ a ąĮąĄ čĆą░ą▓ąĮąŠ b, ąØą× ą▓čŗčĆą░ąČąĄąĮąĖąĄ a=b ąĖčüčéąĖąĮąĮąŠ ą▓čüąĄą│ą┤ą░, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊 ąĮąĄ čüčĆą░ą▓ąĮąĄąĮąĖąĄ, čŹč鹊 ą┐čĆąĖčüą▓ąŠąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ a ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ b.
ąØą░ą┐čĆąĖą╝ąĄčĆ ąĄčüą╗ąĖ a=5, b=3, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗčĆą░ąČąĄąĮąĖčÅ a%b ą▒čāą┤ąĄčé čĆą░ą▓ąĮąŠ 2 (čé.ą║. 5/3=1 (ąŠčüčé.2))
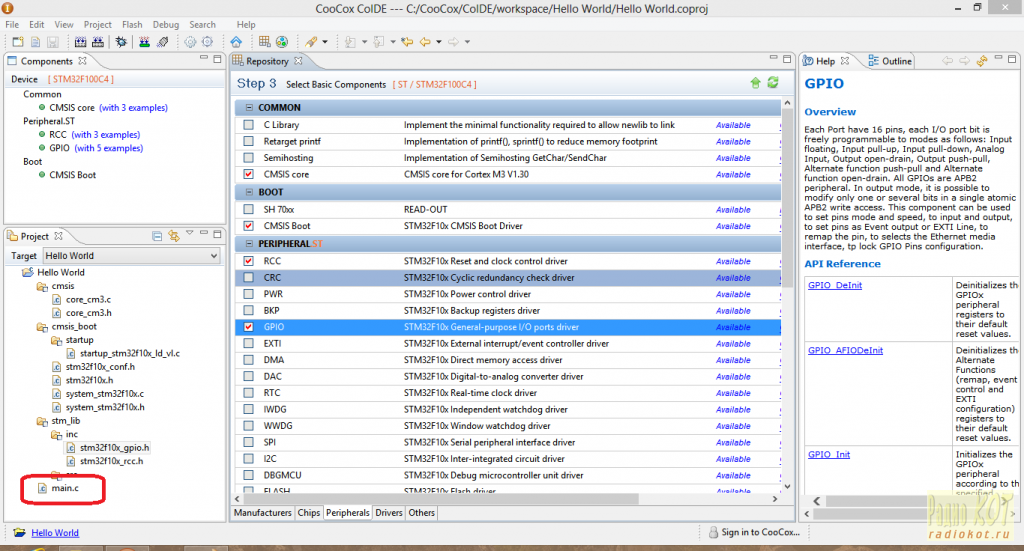
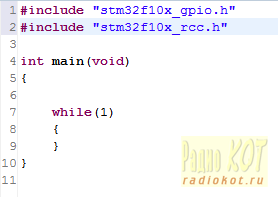
ą¦čāčéčī ąĮąĄ ąĘą░ą▒čŗą╗ čĆą░čüčüą║ą░ąĘą░čéčī ą┐čĆąŠ čåąĖą║ą╗čŗ. ą×čüąĮąŠą▓ąĮčŗąĄ: while(čāčüą╗ąŠą▓ąĖąĄ) { č鹥ą╗ąŠ čåąĖą║ą╗ą░ } ąóąĄą╗ąŠ čåąĖą║ą╗ą░ (ą▓čüčæ čćč鹊 ą▓ čäąĖą│čāčĆąĮčŗčģ čüą║ąŠą▒ą║ą░čģ) ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüą╗ąŠą▓ąĖąĄ ąĖčüčéąĖąĮąĮąŠ (ą┐ąŠą║ą░ čāčüą╗ąŠą▓ąĖąĄ ąĮąĄ čüčéą░ąĮąĄčé ą╗ąŠąČąĮčŗą╝).
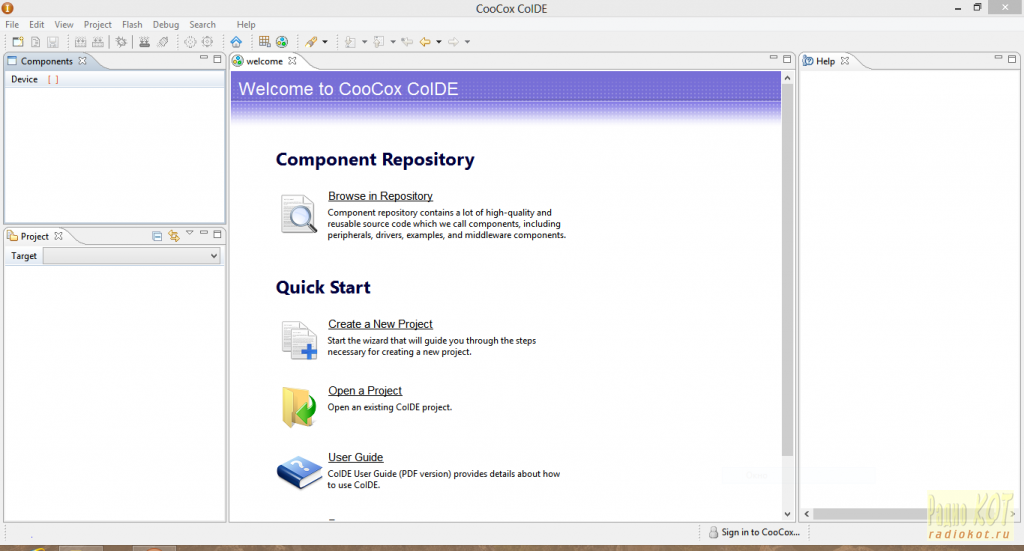
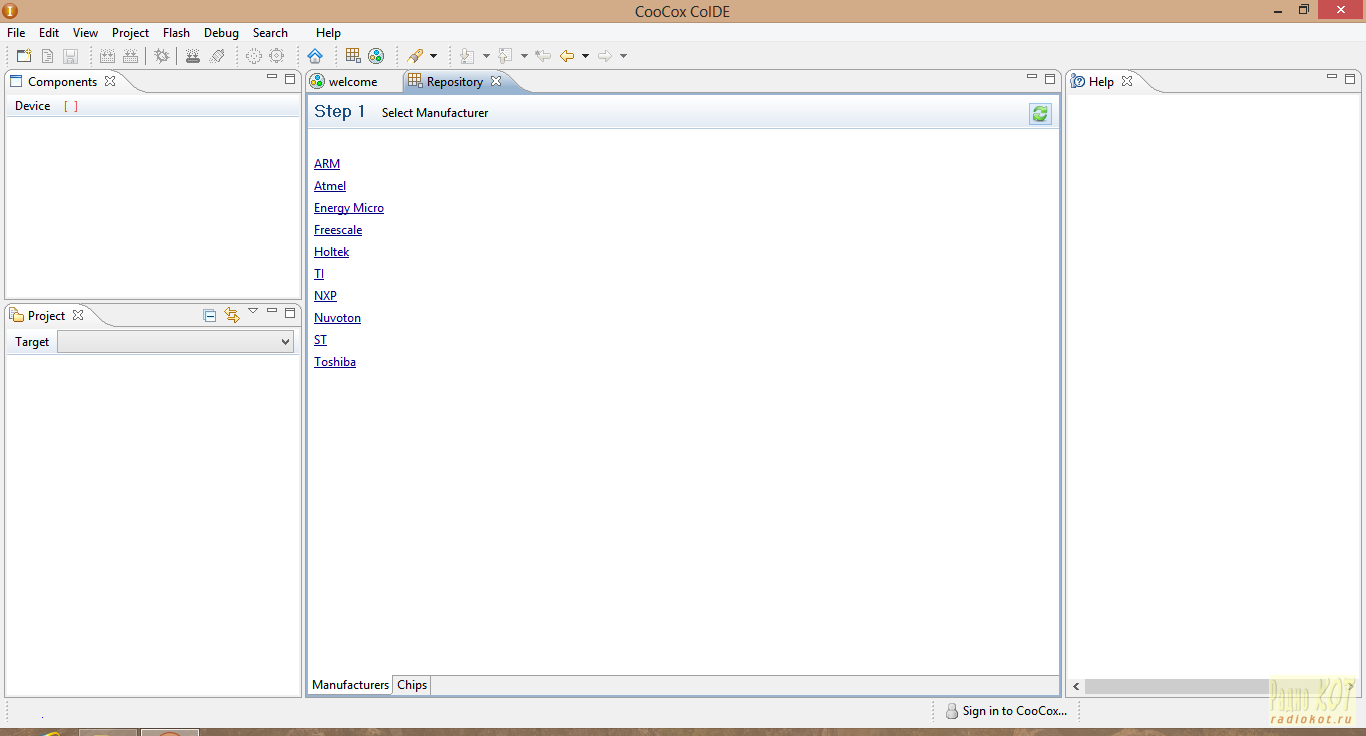
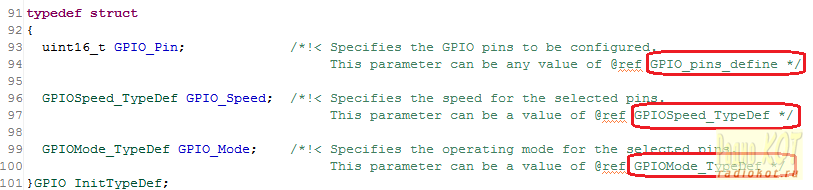
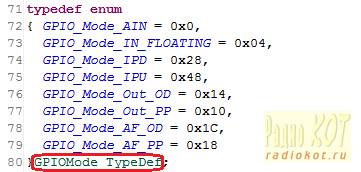
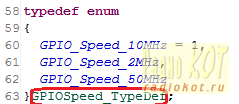
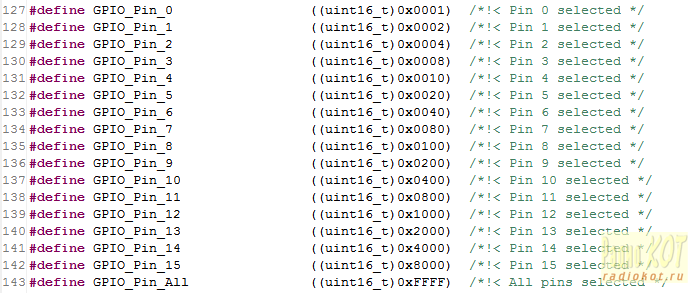
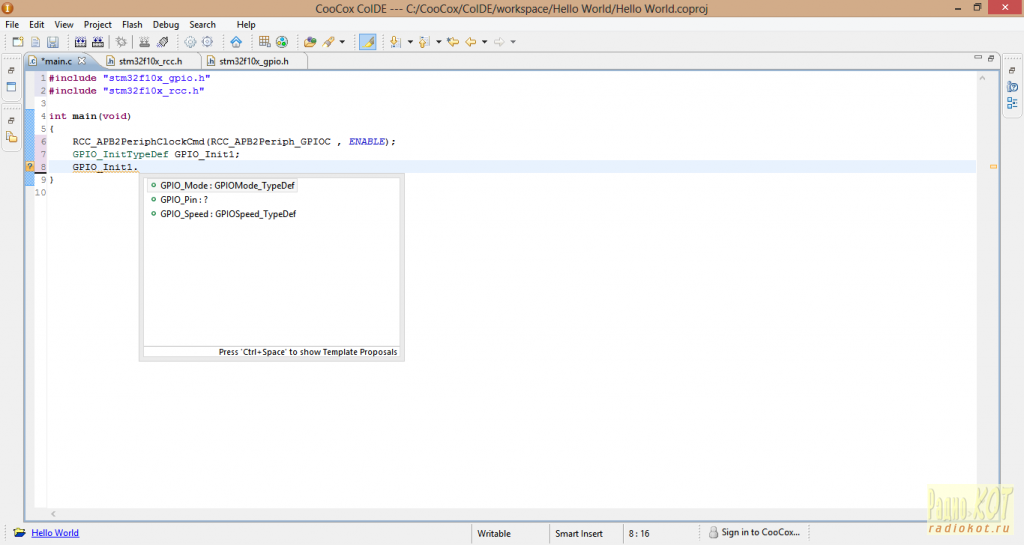
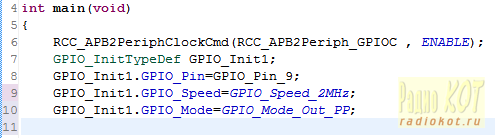
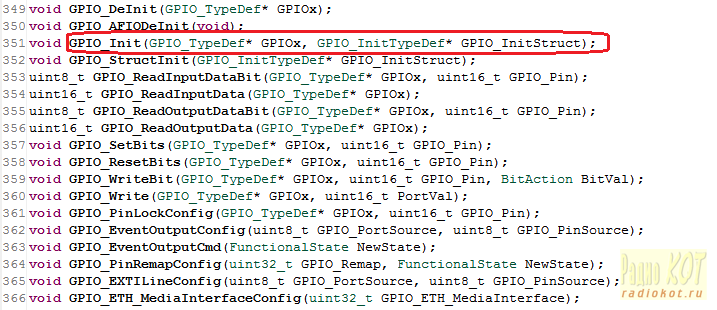
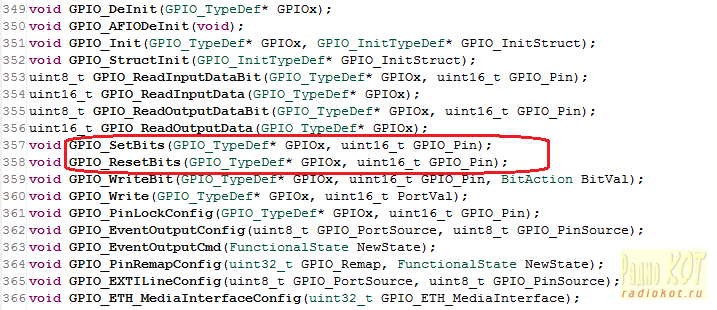
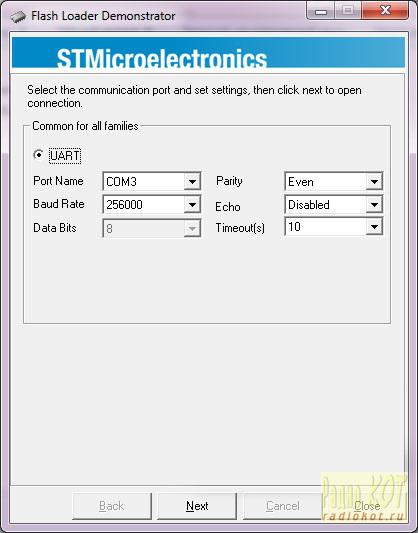
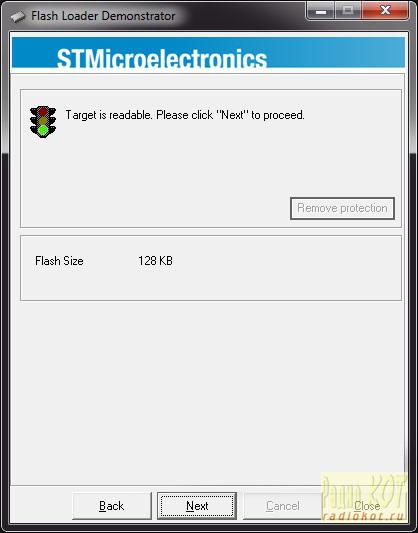
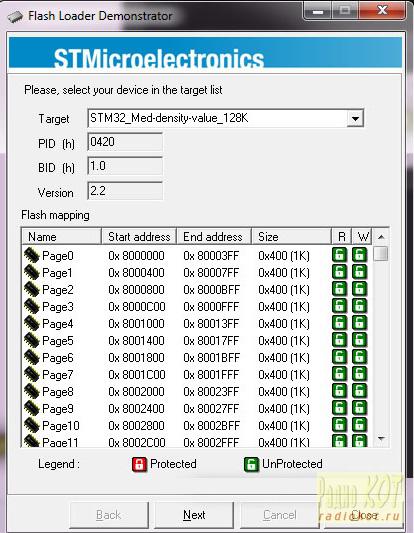
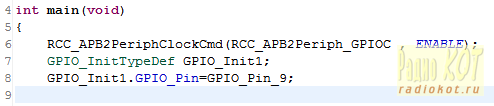
ąöą░ą╗čīčłąĄ ąĖą┤čæčé čåąĖą║ą╗ ą▓čüąĄčģ čåąĖą║ą╗ąŠą▓. ą”ąĖą║ą╗ čüąŠ čüč湥čéčćąĖą║ąŠą╝. ą×ąĮ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘ, ą▓čŗą│ą╗čÅą┤ąĖčé ąŠąĮ čéą░ą║: for (ąĮą░čćą░ą╗čīąĮąŠąĄ_ąĘąĮą░č湥ąĮąĖąĄ; čåąĖą║ą╗_ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ_ą┤ąŠ, čłą░ą│) { č鹥ą╗ąŠ čåąĖą║ą╗ą░ { ąØą░čćą░ą╗čīąĮąŠąĄ_ąĘąĮą░č湥ąĮąĖąĄ - ąĮą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüčćčæčéčćąĖą║ą░ ą”ąĖą║ą╗_ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ_ą┤ąŠ - ą┤ąŠ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ą║ą░ą║ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čåąĖą║ą╗ ą©ą░ą│ - čü ą║ą░ą║ąĖą╝ čłą░ą│ąŠą╝ čüč湥čéčćąĖą║ čüčćąĖčéą░ąĄčé ąØą░ą┐čĆąĖą╝ąĄčĆ for (i=0; i<10, i++) { č鹥ą╗ąŠ čåąĖą║ą╗ą░ } ąŚą┤ąĄčüčī ąĮą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ i čĆą░ą▓ąĮąŠ 0, čåąĖą║ą╗ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ą┐ąŠą║ą░ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ i ą╝ąĄąĮčīčłąĄ 10, ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ čåąĖą║ą╗ą░ ą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ i ą┐čĆąĖą▒ą░ą▓ą╗čÅąĄčéčüčÅ 1. ąóą░ą║ ąČąĄ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčī ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┐čĆčÅą╝ąŠ ą▓ čåąĖą║ą╗ąĄ. ąöą░ą╗čīčłąĄ ą┐ąŠ ą┐ą╗ą░ąĮčā «čāčüą╗ąŠą▓ąĮčŗą╣ ą┐ąĄčĆąĄčģąŠą┤»: if (čāčüą╗ąŠą▓ąĖąĄ){ č鹥ą╗ąŠ 1 } else { č鹥ą╗ąŠ 2 } ąÆ čāčüąŠą▓ąĮąŠą╝ ą┐ąĄčĆąĄčģąŠą┤ąĄ «č鹥ą╗ąŠ 1» ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ąĄčüą╗ąĖ čāčüą╗ąŠą▓ąĖąĄ ąĖčüčéąĖąĮąĮąŠ ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ «č鹥ą╗ąŠ 2», ąĄčüą╗ąĖ čāčüą╗ąŠą▓ąĖąĄ ą╗ąŠąČąĮąŠ. ąĢčēčæ ąĄčüčéčī čéą░ą║ąŠą╣ ą▓ą░čĆąĖą░ąĮčé: if (čāčüą╗ąŠą▓ąĖąĄ 1){ č鹥ą╗ąŠ 1 } else if (čāčüą╗ąŠą▓ąĖąĄ 2) { č鹥ą╗ąŠ 2 } ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ «č鹥ą╗ąŠ 1» ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ąĄčüą╗ąĖ ąĖčüčéąĖąĮąĮąŠ «čāčüą╗ąŠą▓ąĖąĄ 1», «č鹥ą╗ąŠ 2» ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ąĄčüą╗ąĖ ąĖčüčéąĖąĮąĮąŠ «čāčüą╗ąŠą▓ąĖąĄ 2». ąóą░ą║ąĖčģ čāčüą╗ąŠą▓ąĖą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠą╗čīą║ąŠ čāą│ąŠą┤ąĮąŠ, čéą░ą║ ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┤ąĮąŠ else. ąŻčüą╗ąŠą▓ąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčüčéčŗą╝ąĖ ąĖ čüąŠčüčéą░ą▓ąĮčŗą╝ąĖ: ą┐čĆąŠčüčéčŗąĄ - ąŠą┤ąĮąŠ ą╗ąŠą│ąĖč湥čüą║ąŠąĄ ą▓čŗčĆą░ąČąĄąĮąĖąĄ, ą░ čüąŠčüčéą░ą▓ąĮąŠąĄ - ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╗ąŠą│ąĖč湥čüą║ąĖčģ ą▓čŗčĆą░ąČąĄąĮąĖą╣ čüąŠąĄą┤ąĖąĮčæąĮąĮčŗčģ ąĘąĮą░ą║ąŠą╝ & (čāčüą╗ąŠą▓ąĖčÅ ąĖčüčéąĖąĮąĮąŠ, ą║ąŠą│ą┤ą░ ą▓čüąĄ čāčüą╗ąŠą▓ąĖčÅ čüąŠąĄą┤ąĖąĮčæąĮąĮčŗąĄ čŹčéąĖą╝ ąĘąĮą░ą║ąŠą╝ ąĖčüčéąĖąĮąĮčŗ) ąĖą╗ąĖ | (čāčüą╗ąŠą▓ąĖąĄ ąĖčüčéąĖąĮąĮąŠ, ąĄčüą╗ąĖ čģąŠčéčÅą▒čŗ ąŠą┤ąĮąŠ čāčüą╗ąŠą▓ąĖąĄ čüąŠąĄą┤ąĖąĮčæąĮąĮąŠąĄ čŹčéąĖą╝ ąĘąĮą░ą║ąŠą╝ ąĖčüčéąĖąĮąĮąŠ). ąĢčēčæ ą┐ąŠą╗ąĄąĘąĮą░čÅ ą▓ąĄčēčī - ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ. ą¤ąŠą╝ąŠą│čāčé čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ ąĘą░ą▒čŗč鹊ą╝ ą┐čĆąŠąĄą║č鹥 :) ąĖą╗ąĖ ą┐čĆąŠčüč鹊 čćč鹊 ą▒čŗ čćč鹊-č鹊 ąĮąĄ ąĘą░ą▒čŗčéčī. ąÜąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī ą╝ąŠąČąĮąŠ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ąĘąĮą░ą║ąŠą▓ // ąĖ ą┤ąŠ ą║ąŠąĮčåą░ čüčéčĆąŠą║ąĖ ąĖą╗ąĖ ąĮą░čćąĖąĮą░čÄčéčüčÅ ąĘąĮą░ą║ą░ą╝ąĖ /* ąĖ ąĘą░ą║ą░ąĮčćąĖą▓ą░čÄčéčüčÅ */, ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║. ąØą░ čĆą░ąĘą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ąĮąĄ ą▓ą╗ąĖčÅčÄčé. ąØčā ą▓ąŠčé, ąĖąĘ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą▓čĆąŠą┤ąĄ ą▓čüčæ. ąØą░ ą┐ąĄčĆą▓ąŠąĄ ą▓čĆąĄą╝čÅ čģą▓ą░čéąĖčé (ą┤ąŠ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą╣ čćą░čüčéąĖ čüčéą░čéčīąĖ) ą¤ąĄčĆą▓ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąØąĄ ą▒čāą┤ąĄą╝ ąŠčéčüčéčāą┐ą░čéčī ąŠčé čéčĆą░ą┤ąĖčåąĖą╣ (ą░ č鹊 ą╝ą░ą╗ąŠ ą╗ąĖ) ąĖ ąĮą░čćąĮčæą╝ čü Hello World. ąÉ ą┐ąŠ ą┐čāčéąĖ ą▒čāą┤ąĄą╝ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ąĘąĮą░ą║ąŠą╝ąĖčéčīčüčÅ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ąĖ čéą░ą║ čüą║ą░ąĘą░čéčī ą┐ąŠą╗čāčćą░čéčī ąŠą┐čŗčé. ą×čéą║čĆčŗą▓ą░ąĄą╝ čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ: ąØą░ąČąĖą╝ą░ąĄą╝ Browse in Repository ąÆčŗą▒ąĖčĆą░ąĄą╝ ST ąś ą┤ą░ą╗ąĄąĄ čüą▓ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ą¤ąŠč鹊ą╝ ą╝čŗ čāą▓ąĖą┤ąĖą╝ čüą┐ąĖčüąŠą║ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║. ąöą╗čÅ ąĮą░čłąĄą╣ ą┐čĆąŠčüč鹥ąĮčīą║ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ: CMSIS core, CMSIS Boot, RCC, GPIO. ąæąĖą▒ą╗ąĖąŠč鹥ą║ąĖ CMSIS core ąĖ CMSIS Boot - čüąĖčüč鹥ą╝ąĮčŗąĄ, ąĖčģ ąĮčāąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ RCC ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čüąĖčüč鹥ą╝ąŠą╣ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ GPIO ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┐ąŠčĆčéą░ą╝ąĖ ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░ ąóąĄą┐ąĄčĆčī čüą╗ąĄą▓ą░ ą▓ ąŠą║ąĮąĄ Project ąŠčéą║čĆčŗą▓ą░ąĄą╝ čäą░ą╣ą╗ main.c. ąĪąĮą░čćą░ą╗ą░ ąĮčāąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĮą░čłąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ (CMSIS ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ąĮąĄ ąĮčāąČąĮąŠ). ąśą┤čæą╝ ą▓ čüą░ą╝ąŠąĄ ąĮą░čćą░ą╗ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ą┤ąŠą▒ą░ą▓ą╗čÅąĄą╝ čüčéčĆąŠčćą║ąĖ: #include "stm32f10x_gpio.h" ąÆąŠčé čéą░ą║: ąöą░ą╗ąĄąĄ ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī čäčāąĮą║čåąĖčÄ ąĘą░ą┤ąĄčƹȹ║ąĖ (ąĮąĄ čģąŠčéąĖą╝ ąČąĄ ą╝čŗ ą╝ąĖą│ą░čéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ čü čćą░čüč鹊č鹊ą╣ ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą£ąōčå?). void Delay(int i) { ąóą░ą║. ąóčāčé ą┐ąŠ ą┐ąŠčĆčÅą┤ą║čā, čäčāąĮą║čåąĖčÅ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé, ą┐ąŠ čŹč鹊ą╝čā void, ąĮą░ąĘą▓ą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ Delay, čüčĆą░ąĘčā ąŠą▒čŖčÅą▓ą╗čÅąĄą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ i čéąĖą┐ą░ int. ąÆ čäąĖą│čāčĆąĮčŗčģ čüą║ąŠą▒ą║ą░čģ č鹥ą╗ąŠ čäčāąĮą║čåąĖąĖ - čåąĖą║ą╗ for. ąŁč鹊 ąĄą│ąŠ čüčéčĆąŠčćąĮą░čÅ ąĘą░ą┐ąĖčüčī. ąØą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ i ą╝čŗ ąĮąĄ ąĖąĘą╝ąĄąĮčÅąĄą╝, čåąĖą║ą╗ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ą┐ąŠą║ą░ i ąĮąĄ čĆą░ą▓ąĮą░ ąĮčāą╗čÄ (ą║ą░ą║ i čüčéą░ąĮąŠą▓ąĖčéčüčÅ čĆą░ą▓ąĮą░ ąĮčāą╗čÄ, čåąĖą║ą╗ ą┐čĆąĄą║čĆą░čēą░ąĄčéčüčÅ, čäčāąĮą║čåąĖčÅ «ą▓čŗą║ą╗čÄčćą░ąĄčüčÅ»). ąĪ ą║ą░ąČą┤čŗą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ č鹥ą╗ą░ čåąĖą║ą╗ą░ (čéą░ą║č鹊ą╝) ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ i čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ąĮą░ 1. ąó.ąĄ. čüčāčéčī čåąĖą║ą╗ą░ - ą┐čĆąŠčüč鹊 ą┐ąŠą▓č鹊čĆąĖčéčīčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘ čĆą░ą▓ąĮąŠąĄ i. ą¤ąŠą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čåąĖą║ą╗ ą▓čĆąĄą╝čÅ ąĖą┤čæčé, ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĘą░ą┤ąĄčƹȹ║ą░. ąöą░ą╗ąĄąĄ ą▓ ą│ą╗ą░ą▓ąĮąŠą╣ čäčāąĮą║čåąĖąĖ main ąĮčāąČąĮąŠ ą▓ą║ą╗čÄčćąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░, ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░čéčī ą╝ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą▓ čäą░ą╣ą╗ąĄ stm32f10x_rcc.h: ąÜą░ą║ąŠą╣ ą┐ąŠčĆčé ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮčŗą╣ ąĘą░ ą║ą░ą║ąŠą╣ ą▓čŗą▓ąŠą┤ ą╝ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą║ ą£ąÜ: ąöą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčĆčéą░ ąĪ ą┤ąŠą▒ą░ą▓ą╗čÅąĄą╝ čüčéčĆąŠčćą║čā: RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE); ąöą░ą╗ąĄąĄ ąĮčāąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą▓čŗą▓ąŠą┤čŗ. ąĪą╝ąŠčéčĆąĖą╝, ą▓ čäą░ą╣ą╗ąĄ stm32f10x_gpio.h ą▓ ą║ą░ą║ąŠą╣ čüčéčĆčāą║čéčāčĆąĄ ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ą▓čŗą▓ąŠą┤čŗ: ąöąŠą▒ą░ą▓ą╗čÅąĄą╝ ą▓ ą┐čĆąŠą│ą░čĆą╝ą╝čā čüčéčĆąŠčćą║čā: GPIO_InitTypeDef GPIO_Init1; ąŁč鹊ą╣ čüčéčĆąŠčćą║ąŠą╣ ą╝čŗ ąŠą▒čŖčÅą▓ąĖą╗ąĖ čüčéčĆčāą║čéčāčĆčā GPIO_InitTypeDef - ą┤ą░ą╗ąĖ ąĄą╣ ąĮą░ąĘą▓ą░ąĮąĖąĄ GPIO_Init ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ąĮą░čłąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┤ą░ą╗ąĄąĄ. ąÜą░ą║ąĖąĄ ą▓ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆąĄ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ą║ą░ą║ąŠą╣ ą▓ąĖą┤ ąŠąĮąĖ ąĖą╝ąĄčÄčé, čüą╝ąŠčéčĆąĖą╝ ą▓čüčæ ą▓ č鹊ą╝ ąČąĄ stm32f10x_gpio.h: ąóąĄą┐ąĄčĆčī čćč鹊ą▒čŗ ąĮą░čüčéčĆąŠąĖčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ čüčéčĆčāą║čéčāčĆčŗ ąĮčāąČąĮąŠ ąĮą░ą┐ąĖčüą░čéčī ąĄčæ ąĮą░ąĘą▓ą░ąĮąĖąĄ, ą┐ąŠčüčéą░ą▓ąĖčéčī č鹊čćą║čā ąĖ ą┐ąŠčÅą▓ąĖčéčüčÅ ąŠą║ąŠčłąĄčćą║ąŠ ą▓ ą║ąŠč鹊čĆąŠą╝ čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čāą║ą░ąĘą░ąĮčŗ ąöą▓ą░ąČą┤čŗ čēčæą╗ą║ą░ąĄą╝ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąĖąĘ ąĮąĖčģ, ąĖ ąŠąĮ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą▓ čüčéčĆąŠą║ąĄ, ą┤ą░ą╗ąĄąĄ čüčéą░ą▓ąĖą╝ = (ą┐čĆąĖčüą▓ąŠąĖčéčī) ąĖ ą┐čĆąŠą┐ąĖčüčŗą▓ą░ąĄą╝ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ stm32f10x_gpio.h ąóą░ą║ ąČąĄ ą┐ąŠčüčéčāą┐ą░ąĄą╝ čüąŠ ą▓čüąĄą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. ąØąĄ ąĘą░ą▒čŗą▓ą░ąĄą╝ č鹊čćą║čā čü ąĘą░ą┐čÅč鹊ą╣ ą▓ ą║ąŠąĮčåąĄ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąĖ! ąöą░ą╗ąĄąĄ ąĮčāąČąĮą░ čüčéčĆąŠą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ (ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, ąĮąŠ ą▓ąŠ ąĖąĘą▒ąĄąČą░ąĮąĖąĖ ąĮąĄą┐čĆąĖčÅčéąĮąŠčüč鹥ą╣ ąČąĄą╗ą░č鹥ą╗čīąĮą░) GPIO_Init(GPIOC , &GPIO_Init); ąóąĄą┐ąĄčĆčī ą▒čāą┤ąĄą╝ ą╝ąĖą│ą░čéčī! ą£ąĖą│ą░čéčī ą╝čŗ ą▒čāą┤ąĄą╝ čåąĖą║ą╗ąĖčćąĮąŠ, čüą┤ąĄą╗ą░ąĄą╝ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ ą▓ čåąĖą║ą╗ąĄ while. ąŻčüą╗ąŠą▓ąĖąĄ čåąĖą║ą╗ą░ ą▒čāą┤ąĄčé 1. ąĢą┤ąĄąĮąĖčåą░ - ą▓čüąĄą│ą┤ą░ ąĖčüčéąĖąĮą░, ąĮčāą╗čī - ą▓čüąĄą│ą┤ą░ ą╗ąŠąČčī.. čéą░ą║ąŠą▓ą░ čüąĄ ą╗čÅ ą▓ąĖ.. ą¦č鹊ą▒čŗ ą┐ąŠą┤ą░čéčī č鹊ą║ ąĮą░ ą▓čŗą▓ąŠą┤ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé, čćč鹊ą▒čŗ ą▓čŗą║ą╗čÄčćąĖčéčī ą▓čŗą▓ąŠą┤ ąĮčāąČąĮąŠ čüą▒čĆąŠčüąĖčéčī ą▒ąĖčé. ąÜą░ą║ čŹč鹊 ą┤ąĄą╗ą░čéčī - ą▓čüčæ ą▓ č鹊ą╝ ąČąĄ stm32f10x_gpio.h: ąöąĄą╗ą░ąĄą╝ čéą░ą║: while (1){ GPIO_SetBits(GPIOC, GPIO_Pin_9); Delay (200000); GPIO_ResetBits(GPIOC, GPIO_Pin_9); Delay (200000); } 1 ą▓čüąĄą│ą┤ą░ ąĖčüčéąĖąĮą░, ąĘąĮą░čćąĖčé čåąĖą║ą╗ ą▒čāą┤ąĄčé ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ. GPIO_SetBits - čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ GPIO_ResetBits - čäčāąĮą║čåąĖčÅ čüą▒čĆąŠčüą░ ą▒ąĖčéą░ Delay (200000) - ąĮą░ čŹč鹊ą╣ čüčéčĆąŠčćą║ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čäčāąĮą║čåąĖčÄ Delay, ą▓ čéčā čüą░ą╝čāčÄ, ą▓ ą║ąŠč鹊čĆąŠą╣ čåąĖą║ą╗ for. ą¦ąĖčüą╗ąŠ 200000 ą▓ čüą║ąŠą▒ą║ą░čģ - ą┐ąĄčĆąĄą┤ą░čæčéčüčÅ ą▓ čŹčéčā čäčāąĮą║čåąĖčÄ, ą║ą░ą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ i. (ą┐ąŠą╝ąĮąĖą╝ čüčéčĆąŠčćą║čā void Delay(int i)?) ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ č鹊čé čüą░ą╝čŗą╣ čåąĖą║ą╗ ą▓ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, ą▓čüąĄ 200000 čĆą░ąĘ. ąŁč鹊 ą▒čŗčüčéčĆąŠ :) ą┐ąŠčüą╗ąĄ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čåąĖą║ą╗ą░ for čäčāąĮą║čåąĖčÅ Delay ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčé čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā, čé.ą║. ąŠąĮą░ void, č鹊 ąŠąĮą░ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┤ą░ą╗čīčłąĄ. ąó.ą║. while ąĘą░čåąĖą║ą╗ąĄąĮ, č鹊 ą▓ą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░, ąĘą░ą┤ąĄčƹȹ║ą░, ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░, ąĘą░ą┤ąĄčƹȹ║ą░ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ čåąĖą║ą╗ąĖčćąĮąŠ. ą¤ąŠą║ą░ ąĮąĄ ą▓čŗą║ą╗čÄčćąĖčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĖą╗ąĖ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤čæčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (ąŠą▒ čŹč鹊ą╝ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čüčéą░čéčīąĄ). ąØčā ą▓ąŠčé, ą┐ąĄčĆą▓ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą│ąŠč鹊ą▓ą░. ąóąĄą┐ąĄčĆčī ąĮą░ąČąĖą╝ą░ąĄą╝ F7, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ. ąóąĄą┐ąĄčĆčī ąĄčüą╗ąĖ čā ąÆą░čü ąŠčéą╗ą░ą┤ąŠčćąĮą░čÅ ą┐ą╗ą░čéą░, č鹊 ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ ąĄčæ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ USB čłąĮčāčĆą║ą░ ąĖ ąĮą░ąČąĖą╝ą░ąĄą╝ Download Code To Flash. ąĀą░ą┤čāąĄą╝čüčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ čĆą░ą▒ąŠč鹥 ąĖ ą┐ąŠą╗čāč湥ąĮąĮčŗą╝ ąĘąĮą░ąĮąĖčÅą╝ :) ąÉ ąĄčüą╗ąĖ čā ąÆą░čü ąĮąĄ ąŠčéą╗ą░ą┤ąŠčćąĮą░čÅ ą┐ą╗ą░čéą░, č鹊 ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ čüą▓ąŠąĄą╣ ą┐ą╗ą░č鹥 ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ čüą┤ąĄą╗ą░ąĮčŗą╣ čĆą░ąĮąĄąĄ, ą░ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ ą║ COM-ą┐ąŠčĆčéčā ą║ąŠą╝ą┐čīčÄč鹥čĆą░. ąöą░ą╗ąĄąĄ čüąŠąĄą┤ąĖąĮąĖč鹥 ą▓čŗą▓ąŠą┤ BOOT 0 c ą┐ą╗čÄčüąŠą╝ ą┐ąĖčéą░ąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖ ą▓ą║ą╗čÄčćąĖč鹥 ą┐ąĖčéą░ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąóąĄą╝ čüą░ą╝čŗą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ąŠą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠčłąĖą▓ą║ąĖ. ąÆąŠąŠą▒čēąĄ ą┐čĆąŠčåąĄą┤čāčĆą░ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĮąĄ čüą╗ąŠąČąĮą░čÅ. ąØčāąČąĮąŠ ą┐čĆąŠčüč鹊 čüą╗ąĄą┤ąŠą▓ą░čéčī čāą║ą░ąĘą░ąĮąĖčÅą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ Flash Loader Demonstrator. ąĪąĮą░čćą░ą╗ą░ čāą║ą░ąĘčŗą▓ą░ąĄą╝ ąĮąŠą╝ąĄčĆ COM-ą┐ąŠčĆčéą░, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ čā ąÆą░čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖ čüą║ąŠčĆąŠčüčéčī. ąöą╗čÅ ą▓ąŠąĖąĘą▒ąĄąČą░ąĮąĖąĖ čüą▒ąŠąĄą▓, čüą║ąŠčĆąŠčüčéčī ą╗čāčćčłąĄ ą▓čŗą▒čĆą░čéčī ą┐ąŠą╝ąĄąĮčīčłąĄ ąĢčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čāą▓ąĖą┤ąĄą╗ą░ ąÆą░čł ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, č鹊 ą┐ąŠčÅą▓ąĖčéčüčÅ ąŠą║ąĮąŠ, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▒čāą┤ąĄčé ąĮą░ą┐ąĖčüą░ąĮąŠ, čüą║ąŠą╗čīą║ąŠ čā ąĮąĄą│ąŠ ą┐ą░ą╝čÅčéąĖ ą¤ąŠčüą╗ąĄ ąĮą░ąČą░čéąĖčÅ «Next», ąÆčŗ čāą▓ąĖą┤ąĖč鹥 čüčéčĆą░ąĮąĖčåčā čü ą░ą┤čĆąĄčüą░čåąĖąĄą╣ ą┐ą░ą╝čÅčéąĖ. ą×ąĮą░ ąĮą░ą╝ ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čłą░ą│ čüą░ą╝čŗą╣ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮčŗą╣. ą£ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ąŠčćąĖčüčéą║čā ą┐ą░ą╝čÅčéąĖ ąĖą╗ąĖ ą┐čĆąŠčłąĖą▓ą║čā ąöą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ą▓čŗą▒ąĖčĆą░ąĄą╝ Download to device ąĖ ą▓ ą┐ąŠą╗ąĄ Download from file ą▓čŗą▒ąĖčĆą░ąĄą╝ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ .hex čäą░ą╣ą╗, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ CooCox -> CooIDE -> workspace -> ąĖą╝čÅ_ą┐čĆąŠąĄą║čéą░ -> ąĖą╝čÅ_ą┐čĆąŠąĄą║čéą░ -> Debug -> Bin. ą¤ąŠčüą╗ąĄ čüąĮąŠą▓ą░ ąĮą░ąČąĖą╝ą░ąĄą╝ «Next». ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāą▓ąĖą┤ąĖą╝ čéą░ą║ąŠąĄ ąŠą║ąĮąŠ: ą×čéą║ą╗čÄčćą░ąĄą╝ ą┐ąĖčéą░ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĘą░ą║čĆčŗą▓ą░ąĄą╝ Flash Loader Demonstrator, ąŠčéą║ą╗čÄčćą░ąĄą╝ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║, ąĖ ą▓ą║ą╗čÄčćą░ąĄą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ ąŠą▒čŗčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (ą║ąŠą│ą┤ą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą▓čŗą▓ąŠą┤ BOOT 0 čüąŠąĄą┤ąĖąĮąĄąĮ čü ą╝ąĖąĮčāčüąŠą╝ ą┐ąĖčéą░ąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░). ąĀą░ą┤čāąĄą╝čüčÅ!
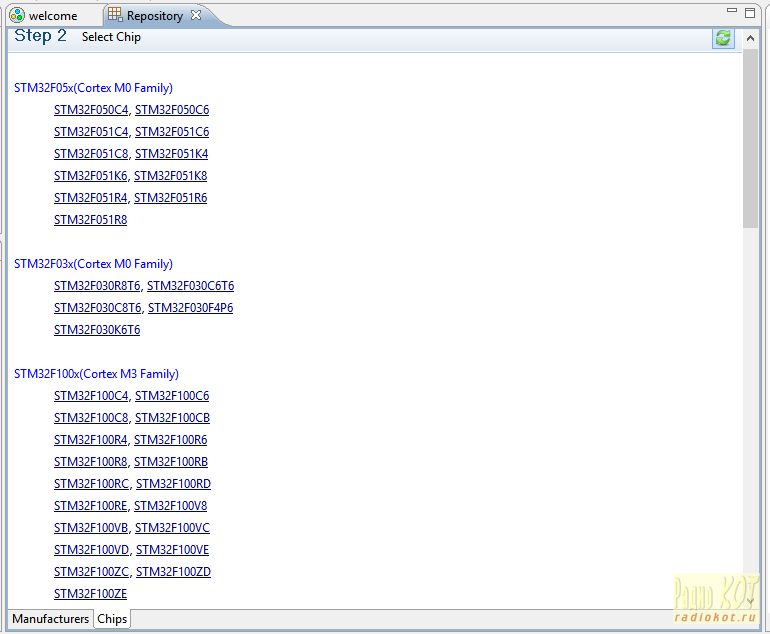
ąśčéą░ą║, č鹥ą┐ąĄčĆčī ą╝čŗ ąĘąĮą░ąĄą╝, č湥ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM ą╗čāčćčłąĄ ą┤čĆčāą│ąĖčģ, ąĘąĮą░ąĄą╝ ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, čāą╝ąĄąĄą╝ ą┐čĆąŠčłąĖą▓ą░čéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ą┐ą╗ą░č鹥 ąĖ ą▓ čüą▓ąŠąĄą╣ ą┐ą╗ą░č鹥, ąĘąĮą░ąĄą╝ ąŠčüąĮąŠą▓čŗ čÅąĘčŗą║ą░ ąĪąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ STM32, ą┐ąŠą╗čāčćąĖą╗ąĖ ąŠą┐čŗčé čĆą░ą▒ąŠčéčŗ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ (ąĮą░ą┤ąĄčÄčüčī ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣) ąĖ čüą░ą╝ąŠąĄ ą│ą╗ą░ą▓ąĮąŠąĄ, č鹥ą┐ąĄčĆčī ąÆčŗ ą╝ąŠąČąĄč鹥 ą▓ąŠą┐ą╗ąŠčéąĖčéčī čüą▓ąŠąĖ ąĖą┤ąĄąĖ čåąĖčäčĆąŠą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ ąČąĖąĘąĮčī (ąĖ ą┐ąŠą▓ąĄą┤ą░čéčī ąŠ ąĮąĖčģ, ąĮą░ ąĮą░čłąĄą╝ ą╗čÄą▒ąĖą╝ąŠą╝ ąĀą░ą┤ąĖąŠąÜąŠč鹥)! ą¤čāčüčéčī ą┐ąŠą║ą░ ąĄčēčæ ą┐čĆąŠčüč鹥ąĮčīą║ąĖąĄ, ąĮąŠ ą▓čüčæ ąĮą░ą▓čæčĆčüčéčŗą▓ą░ąĄčéčüčÅ čü ąŠą┐čŗč鹊ą╝. ąÉ čÅ ą┐ąŠčüčéą░čĆą░čÄčüčī ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüčéą░čéčīčÅčģ čĆą░čüčüą║ą░ąĘą░čéčī ąŠą▒ ąÉą”ą¤, ą”ąÉą¤, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąŠčéą╗ą░ą┤ą║ąĖ ąĖ ą┤čĆčāą│ąĖčģ ą┐ąŠą╗ąĄąĘąĮąŠčüčéčÅčģ. ąŻą┤ą░čćąĮąŠą│ąŠ ą▓ąŠą┐ą╗ąŠčēąĄąĮąĖčÅ ąĖą┤ąĄą╣! ąÆčüąĄ ą▓ąŠą┐čĆąŠčüčŗ, ąĮąĄ čüč鹥čüąĮčÅąĄą╝čüčÅ, ą┐ąĖčłąĄą╝ ąĮą░ č乊čĆčāą╝
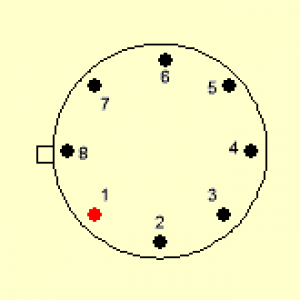
ąÉ ąĄčēčæ čģąŠčćčā ą┐ąŠąĘą┤čĆą░ą▓ąĖčéčī ąĀą░ą┤ąĖąŠąÜąŠčéą░ čü ąĄą│ąŠ ą│ą╗ą░ą▓ąĮčŗą╝ ą┐čĆą░ąĘą┤ąĮąĖą║ąŠą╝! ą¤čāčüčéčī ą▓čĆąĄą╝čÅ ąĖ č鹥čćčæčé, ą║ą░ą║ čäą╗čÄčü ąĖąĘ čāą┐ą░ą▓čłąĄą│ąŠ čäą╗ą░ą║ąŠąĮą░, ąĮąŠ ąĀą░ą┤ąĖąŠąÜąŠčé ą▓čüąĄą│ą┤ą░ ąŠčüčéą░ąĮąĄčéčüčÅ ąĮą░čłąĖą╝ ąĮąĄąĘą░ą╝ąĄąĮąĖą╝čŗą╝ ą┐ąŠą╝ąŠčēąĮąĖą║ąŠą╝ ąĖ ą┐čĆąĖčÄč鹊ą╝ ą┤ą╗čÅ ą║ąŠč鹊ą▓ (ąĖ ą║ąŠčéčÅčé) čü ą┐ą░čÅą╗čīąĮąĖą║ą░ą╝ąĖ. ąŚą┤ąŠčĆąŠą▓čīčÅ č鹥ą▒ąĄ (ą▓čüąĄ 7 čłčéčāą║), ąĮąĄč湥ą╗ąŠą▓ąĄčćčīąĄą│ąŠ čüčćą░čüčéčīčÅ ąĖ čüą▒čŗčćąĖ ą║ąŠčłą░čćąĖčģ ą╝ąĄčćčé! ąĪąŠą▒ą╗čÄą┤ą░ą╣ ąóąæ :)
ążą░ą╣ą╗čŗ: ąÆčüąĄ ą▓ąŠą┐čĆąŠčüčŗ ą▓ ążąŠčĆčāą╝.
ąŁčéąĖ čüčéą░čéčīąĖ ą▓ą░ą╝ č鹊ąČąĄ ą╝ąŠą│čāčé ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ: |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |


 |
||||
|
|
||||









{kind=link}
{kind=link}
{kind=link}
{kind=link}
ąĀą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüą░ą╣čéą░ ą┐čĆąŠą▓ąĄčĆąĄąĮą░ ą▓ ą▒čĆą░čāąĘąĄčĆą░čģ:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
ąÉą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ 菹║čĆą░ąĮą░ ąŠčé 1280čģ1024 ąĖ ą▓čŗčłąĄ.
ą¤čĆąĖ ą╝ąĄąĮčīčłąĖčģ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ ą┐čĆąŠą║čĆčāčéą║ąĖ.
ą¤ąŠ ą▓čüąĄą╝ ą▓ąŠą┐čĆąŠčüą░ą╝ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ąÜąŠčéčā: kot@radiokot.ru
©2005-2024