 |
 |
|||||||||||||||
–Ю —А–∞–Ј—А–∞–±–Њ—В–Ї–µ –њ—А–Є–ї–Њ–ґ–µ–љ–Є–є –і–ї—П ARM –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–≤ —Д–Є—А–Љ—Л Silicon Labs –њ–Њ–і —Г–њ—А–∞–≤–ї–µ–љ–Є–µ–Љ Micri¬µm OS
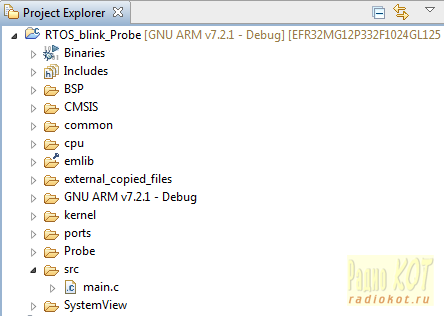
–Р–≤—В–Њ—А: –°–µ—А–≥–µ–є –С–µ–Ј—А—Г–Ї–Њ–≤ (aka Ser60) –Я—А–Є –њ–Њ–і–≥–Њ—В–Њ–≤–Ї–µ —В—А–µ—В—М–µ–є —З–∞—Б—В–Є —Б—В–∞—В—М–Є –Њ —А–∞–Ј—А–∞–±–Њ—В–Ї–µ Bluetooth –њ—А–Є–ї–Њ–ґ–µ–љ–Є–є —Б —Г—З–∞—Б—В–Є–µ–Љ Micriµm® OS (—З–Є—В–∞–µ—В—Б—П –Ї–∞–Ї –Ь–Є–Ї—А–Є—Г–Љ) —П –њ–Њ–љ—П–ї, —З—В–Њ —Б–ї–µ–і—Г–µ—В –њ—А–µ–і–≤–∞—А–Є—В–µ–ї—М–љ–Њ –љ–∞–њ–Є—Б–∞—В—М –Њ—В–і–µ–ї—М–љ—Г—О —Б—В–∞—В—М—О –њ—А–Њ —Н—В—Г —Б–Є—Б—В–µ–Љ—Г –Є –µ—С –Њ—Б–љ–Њ–≤–љ—Л–µ —Д—Г–љ–Ї—Ж–Є–Є. –Т –љ–∞—Б—В–Њ—П—Й–µ–µ –≤—А–µ–Љ—П –Є–Љ–µ–µ—В—Б—П –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –і–µ—Б—П—В–Ї–Њ–≤ –Ю–° —А–µ–∞–ї—М–љ–Њ–≥–Њ –≤—А–µ–Љ–µ–љ–Є –і–ї—П –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–≤, —Б—А–µ–і–Є –Ї–Њ—В–Њ—А—Л—Е –љ–∞—Е–Њ–і–Є—В—Б—П –љ–µ–±–µ–Ј—Л–Ј–≤–µ—Б—В–љ–∞—П FreeRTOS. –•–Њ—В—П –Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —Н—В–Њ–є –Ю–° —Б Simplicity Studio (—Б–Љ. –і–µ—В–∞–ї–Є –≤ [4], [5]), –њ–Њ—Б–ї–µ –≤—Е–Њ–ґ–і–µ–љ–Є—П —Д–Є—А–Љ—Л Micrium –≤ —Б–Њ—Б—В–∞–≤ Silicon Labs –≤ 2016, Micriµm OS —Б—В–∞–ї–∞ –і–µ—Д–Њ–ї—В–љ–Њ–є RTOS –і–ї—П –Є—Е –њ—А–Њ–і—Г–Ї—Ж–Є–Є –Є –Љ–Њ–ґ–µ—В –±—Л—В—М –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–∞ –і–∞–ґ–µ –і–ї—П –Ї–Њ–Љ–Љ–µ—А—З–µ—Б–Ї–Є—Е –њ—А–Њ–µ–Ї—В–Њ–≤ –љ–∞ –љ–µ–є –±–µ–Ј –ї–Є—Ж–µ–љ–Ј–Є–Њ–љ–љ—Л—Е —Б–±–Њ—А–Њ–≤. –Ь–љ–µ –і–Њ–≤–µ–ї–Њ—Б—М –і–≤–∞–ґ–і—Л –њ–Њ—Б–µ—В–Є—В—М 2-–і–љ–µ–≤–љ—Л–µ —В—А–µ–є–љ–Є–љ–≥–Є —Д–Є—А–Љ—Л Micrium –њ–Њ –њ—А–µ–і—Л–і—Г—Й–Є–Љ –≤–µ—А—Б–Є—П–Љ µC/OS-II –Є µC/OS-III –Є—Е —Б–Є—Б—В–µ–Љ—Л, –Ї–Њ–≥–і–∞ –Њ–љ–Є –њ—А–Є–µ–Ј–ґ–∞–ї–Є –≤ –љ–∞—И –≥–Њ—А–Њ–і. –°–Є—Б—В–µ–Љ—Л —Н—В–Є –њ–Њ—А—В–Є—А–Њ–≤–∞–љ—Л –љ–∞ –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –і–µ—Б—П—В–Ї–Њ–≤ —Б–µ–Љ–µ–є—Б—В–≤ –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–≤, –≤ —Б–Њ—Б—В–∞–≤–µ –Ю–° –Є–Љ–µ—О—В—Б—П –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В—Л –і–ї—П —А–∞–±–Њ—В—Л —Б —Д–∞–є–ї–Њ–≤–Њ–є —Б–Є—Б—В–µ–Љ–Њ–є, TCP/IP, USB, GUI –Є –њ—А., —Б–Љ. –њ–Њ–і—А–Њ–±–љ–µ–µ –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –љ–∞ —Б–∞–є—В–µ micrium.com. –Ъ—Б—В–∞—В–Є, –љ–∞—З–Є–љ–∞—П —Б 28 —Д–µ–≤—А–∞–ї—П 2020 —Н—В–Є –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В—Л –≤ —Б–µ–Љ–µ–є—Б—В–≤–µ µC/OS –њ–µ—А–µ–≤–Њ–і—П—В—Б—П –њ–Њ–і –Љ–Њ–і–µ–ї—М –Њ—В–Ї—А—Л—В–Њ–≥–Њ –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–≥–Њ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П (open source). –°–µ–≥–Њ–і–љ—П —Б–Њ–Ї—А–∞—Й—С–љ–љ—Л–µ –Ї—Г—А—Б—Л –њ–Њ —Н—В–Є–Љ –Ю–° –Љ–Њ–ґ–љ–Њ –≤—Б—В—А–µ—В–Є—В—М –љ–∞ –Љ–љ–Њ–≥–Є—Е –±–Њ–ї—М—И–Є—Е –Ї–Њ–љ—Д–µ—А–µ–љ—Ж–Є—П—Е —Н–Љ–±–µ–і–і–µ—А–Њ–≤, –∞ –љ–∞ –≤–µ–±—Б–∞–є—В–∞—Е Micrium –Є Silicon Labs –Є–Љ–µ–µ—В—Б—П –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –≤–Є–і–µ–Њ-—Г—А–Њ–Ї–Њ–≤, —А–∞—Б—Б–Ї–∞–Ј—Л–≤–∞—О—Й–Є—Е –Њ–± –Њ—Б–љ–Њ–≤–љ—Л—Е –∞—Б–њ–µ–Ї—В–∞—Е —Б–Є—Б—В–µ–Љ. –Ч–і–µ—Б—М —П —А–∞—Б—Б–Ї–∞–ґ—Г –≤ –±–Њ–ї–µ–µ –њ—А–∞–Ї—В–Є—З–µ—Б–Ї–Њ–Љ –њ–ї–∞–љ–µ –Ї–∞–Ї –Љ–Њ–ґ–љ–Њ –љ–∞—З–∞—В—М —А–∞–±–Њ—В—Г —Б Micriµm OS –љ–∞ –њ—А–Є–Љ–µ—А–∞—Е —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –і–µ–Љ–Њ-–њ–ї–∞—В—Л Thunderboard Sense 2. –≠—В–Њ –Њ–і–љ–∞ –Є–Ј —Б–∞–Љ—Л—Е –љ–µ–і–Њ—А–Њ–≥–Є—Е –њ–ї–∞—В —Д–Є—А–Љ—Л, –і–Њ—Б—В—Г–њ–љ–∞—П –њ–Њ —Ж–µ–љ–µ –Њ–Ї–Њ–ї–Њ $35. –Я—А–Є–Љ–µ—А—Л —Б–Њ–Ј–љ–∞—В–µ–ї—М–љ–Њ –≤—Л–±—А–∞–љ—Л –њ—А–Њ—Б—В—Л–µ, —В.–Ї. –±–Њ–ї–µ–µ —Б–ї–Њ–ґ–љ—Л–µ –њ—А–Є–Љ–µ—А—Л –і–ї—П –≤–≤–Њ–і–љ–Њ–є —Б—В–∞—В—М–Є —Б—З–Є—В–∞—О –љ–µ—Г–Љ–µ—Б—В–љ—Л–Љ–Є. –Э–µ—Б–Ї–Њ–ї—М–Ї–Њ –±–Њ–ї–µ–µ —Б–ї–Њ–ґ–љ—Л–є –њ—А–Є–Љ–µ—А –±—Г–і–µ—В –≤ —Б—В–∞—В—М–µ –њ—А–Њ Bluetooth. –ѓ –љ–µ –њ—А–µ—В–µ–љ–і—Г—О –Ј–і–µ—Б—М –љ–∞ –њ–Њ–ї–љ–Њ—В—Г –Є–Ј–ї–Њ–ґ–µ–љ–Є—П –≤ —Г—Б–ї–Њ–≤–Є—П—Е –Є–Љ–µ—О—Й–Є—Е—Б—П –≤ —Б–≤–Њ–±–Њ–і–љ–Њ–Љ –і–Њ—Б—В—Г–њ–µ –і–ї—П —Б–Ї–∞—З–Є–≤–∞–љ–Є—П –Ї–љ–Є–≥ –њ–Њ –њ—А–Њ–і—Г–Ї—Ж–Є–Є Micrium [1] –Є –Љ–љ–Њ–ґ–µ—Б—В–≤–∞ –∞–њ–љ–Њ—Г—В–Њ–≤ –љ–∞ —Б–∞–є—В–∞—Е –Њ–±–Њ–Є—Е —Д–Є—А–Љ. –Я–Њ–ї–љ—Л–µ –њ—А–Њ–µ–Ї—В—Л –≤—Б–µ—Е –Љ–Њ–Є—Е –њ—А–Є–Љ–µ—А–Њ–≤, –≤–Ї–ї—О—З–∞—П –Є—Б—Е–Њ–і–љ–Є–Ї–Є, –љ–∞—Е–Њ–і—П—В—Б—П –≤ –њ—А–Є–ї–∞–≥–∞–µ–Љ–Њ–Љ –∞—А—Е–Є–≤–µ. –†–∞–Ј—А–∞–±–Њ—В–Ї—Г –Я–Ю –±—Г–і–µ–Љ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—М –њ–Њ–і –≤–µ—А—Б–Є–µ–є SDK v2.6.4 —Б–Є—Б—В–µ–Љ—Л Simplicity Studio. –°–Њ–Ј–і–∞–љ–Є–µ –њ–Њ—В–Њ–Ї–Њ–≤ –Є –Є–љ—Б—В—А—Г–Љ–µ–љ—В—Л —Б–Є—Б—В–µ–Љ—Л Simplicity Studio –Э–∞—З–љ—С–Љ —Б –Ї–ї–∞—Б—Б–Є—З–µ—Б–Ї–Њ–≥–Њ –њ—А–Є–Љ–µ—А–∞ –Љ–Є–≥–∞–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–Љ, –љ–∞ –Ї–Њ—В–Њ—А–Њ–Љ –њ—А–Њ–і–µ–Љ–Њ–љ—Б—В—А–Є—А—Г–µ–Љ –Ј–∞–њ—Г—Б–Ї —Б–Є—Б—В–µ–Љ—Л, —Б–Њ–Ј–і–∞–љ–Є–µ –њ–Њ—В–Њ–Ї–Њ–≤/–Ј–∞–і–∞—З (tasks), –Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–Њ–≤ µC/Probe –Є Segger SystemView. –Я–Њ—Б–ї–µ –Ј–∞–≥—А—Г–Ј–Ї–Є –њ—А–Њ–µ–Ї—В–∞ RTOS_blink_Probe –Є–Ј –њ—А–Є–ї–∞–≥–∞–µ–Љ–Њ–≥–Њ –∞—А—Е–Є–≤–∞ –≤ Simplicity Studio, —Г–≤–Є–і–Є–Љ —Б–ї–µ–і—Г—О—Й—Г—О –µ–≥–Њ —Б—В—А—Г–Ї—В—Г—А—Г: –Т –њ–∞–њ–Ї–µ BSP –љ–∞—Е–Њ–і—П—В—Б—П —Б–њ–µ—Ж–Є—Д–Є—З–µ—Б–Ї–Є–µ –і–ї—П –і–µ–Љ–Њ-–њ–ї–∞—В—Л –Є –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–≤ —Д–Є—А–Љ—Л –љ–∞—Б—В—А–Њ–є–Ї–Є –њ–µ—А–Є—Д–µ—А–Є–Є. –Ю—Б–љ–Њ–≤–љ—Л–µ –Є—Б—Е–Њ–і–љ–Є–Ї–Є —Б–Њ–±—Б—В–≤–µ–љ–љ–Њ —Б–∞–Љ–Њ–є RTOS —Б–Њ–і–µ—А–ґ–∞—В—Б—П –≤ –њ–∞–њ–Ї–∞—Е common, cpu, kernel, –Є ports, –Є –Љ—Л –Є—Е —В—А–Њ–≥–∞—В—М –љ–µ –±—Г–і–µ–Љ. –Т –њ–∞–њ–Ї–µ emlib –љ–∞—Е–Њ–і—П—В—Б—П –±–Є–±–ї–Є–Њ—В–µ—З–љ—Л–µ —Д—Г–љ–Ї—Ж–Є–Є —А–∞–±–Њ—В—Л —Б –њ–µ—А–Є—Д–µ—А–Є–µ–є —Б–µ–Љ–µ–є—Б—В–≤ EF—Е32, –∞ –≤ –њ–∞–њ–Ї–µ CMSIS – —Б—В–∞—А—В–∞–њ —Д–∞–є–ї—Л –і–ї—П –Ь–Ъ –љ–∞ –њ–ї–∞—В–µ. –Ю–±—К–µ–Ї—В–љ—Л–µ —Д–∞–є–ї—Л –Ї–Њ–Љ–њ–Є–ї—П—Ж–Є–Є –њ—А–Њ–µ–Ї—В–∞ —Б–Є—Б—В–µ–Љ–∞ —Б–Ї–ї–∞–і—Л–≤–∞–µ—В –≤ –њ–∞–њ–Ї—Г GNU, –∞ —Б–∞–Љ–Є «–±–Є–љ–∞—А–љ–Є–Ї–Є» –≤ —А–∞–Ј–љ—Л—Е —Д–Њ—А–Љ–∞—В–∞—Е —В–∞–Ї–ґ–µ –≤ –њ–∞–њ–Ї—Г Binaries. –Я–∞–њ–Ї–Є Probe –Є SystemView –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ—Л –і–ї—П —А–∞–±–Њ—В—Л —Б –≤—Л—И–µ—Г–њ–Њ–Љ—П–љ—Г—В—Л–Љ–Є –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞–Љ–Є. –Т—Б–µ —Б–Є—Б—В–µ–Љ–љ—Л–µ —Д–∞–є–ї—Л, –Ї–Њ—В–Њ—А—Л–µ –Љ—Л –Є–Ј–Љ–µ–љ–Є–ї–Є/–∞–і–∞–њ—В–Є—А–Њ–≤–∞–ї–Є –і–ї—П –љ–∞—И–µ–≥–Њ –њ—А–Њ–µ–Ї—В–∞ –Ї–Њ–њ–Є—А—Г—О—В—Б—П –Є–Ј —Б–Є—Б—В–µ–Љ–љ–Њ–є –Њ–±–ї–∞—Б—В–Є –Є–љ—Б—В–∞–ї–ї—П—Ж–Є–Є —Б–Є—Б—В–µ–Љ—Л –≤ –њ–∞–њ–Ї—Г external_copied_files. –Э–∞–Ї–Њ–љ–µ—Ж, –Є—Б—Е–Њ–і–љ—Л–µ —В–µ–Ї—Б—В—Л –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—П (—Д–∞–є–ї main.c) –љ–∞—Е–Њ–і—П—В—Б—П –≤ –њ–∞–њ–Ї–µ src. –Т –њ—А–Њ—Ж–µ—Б—Б–µ —А–∞–±–Њ—В—Л Micriµm OS –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є —Б–Њ–Ј–і–∞—С—В –і–Њ 4 —Б–ї—Г–ґ–µ–±–љ—Л—Е –њ–Њ—В–Њ–Ї–Њ–≤:
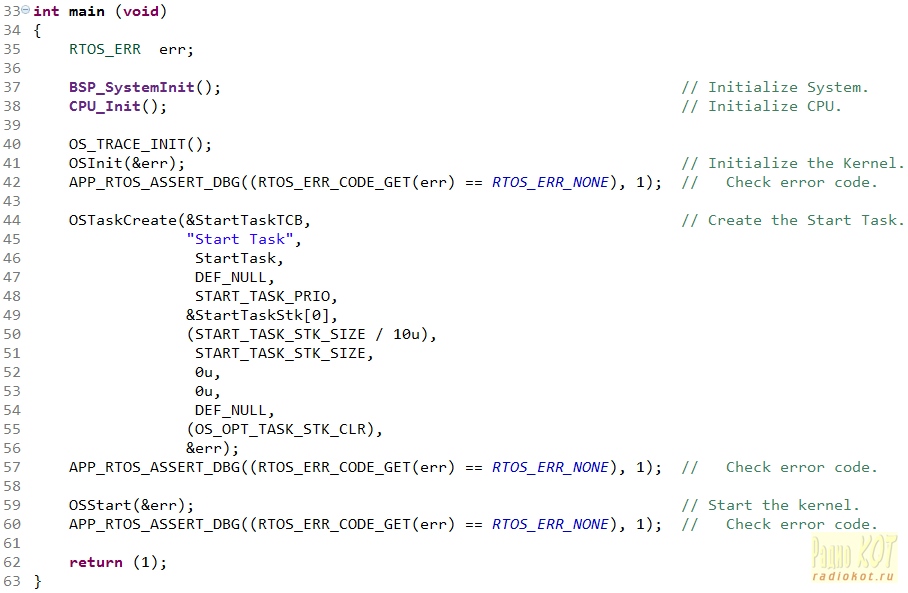
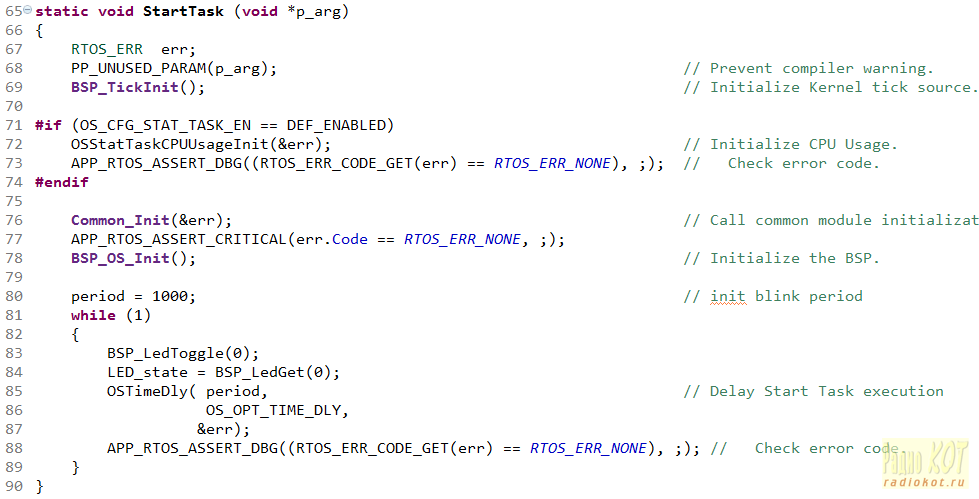
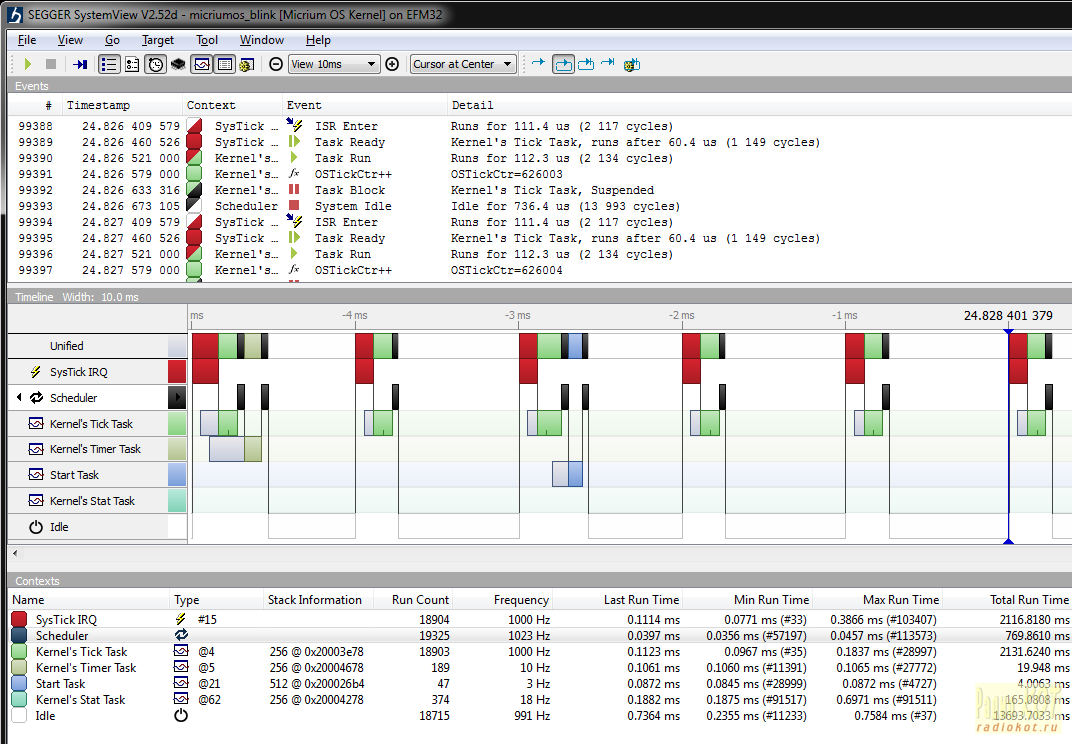
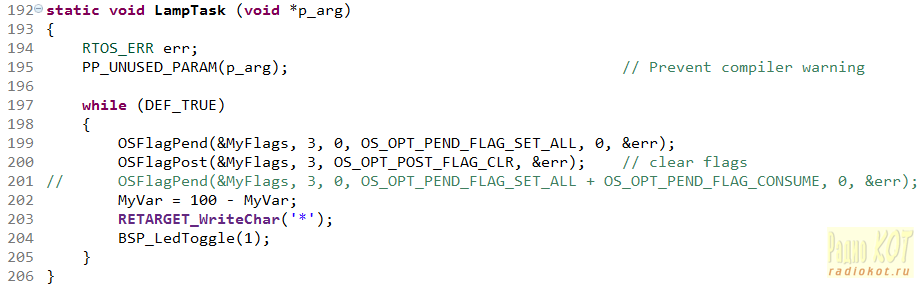
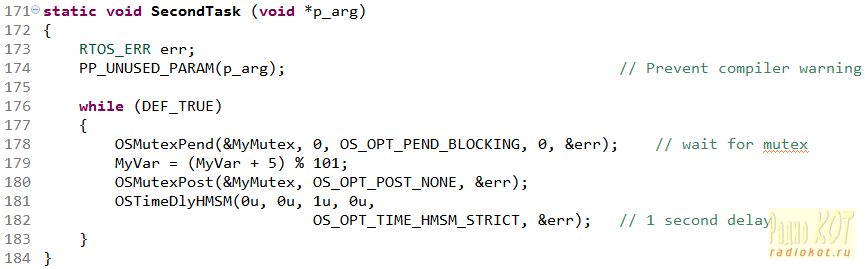
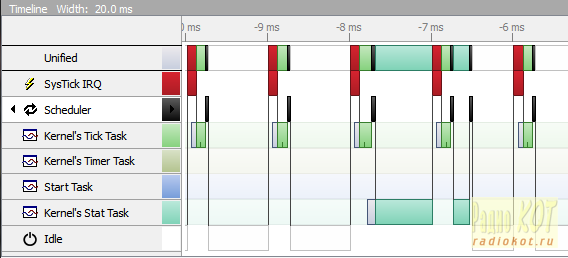
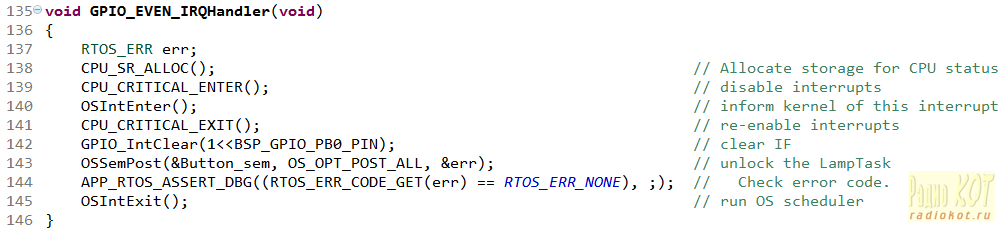
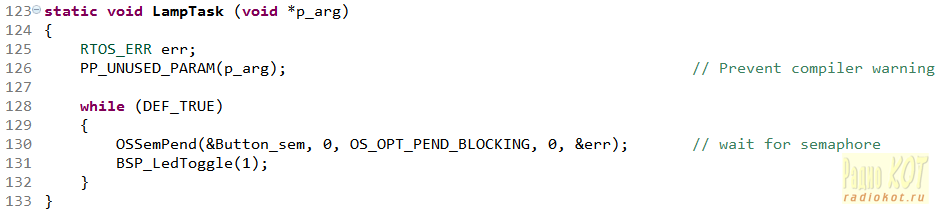
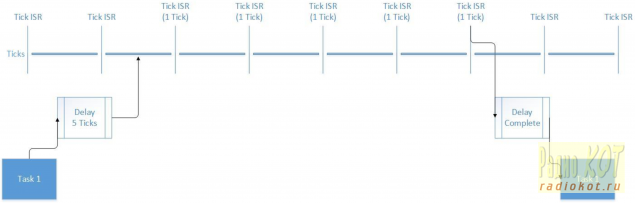
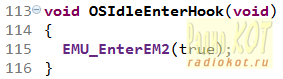
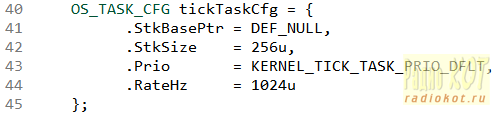
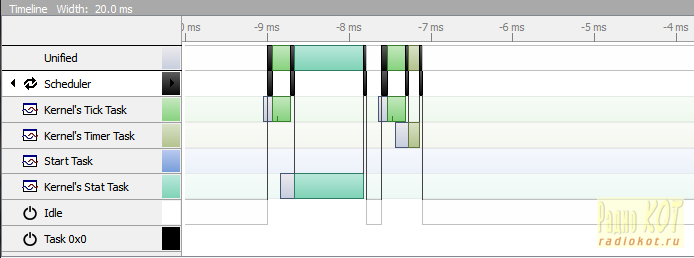
–Ъ–∞–ґ–і—Л–є –Є–Ј —Н—В–Є—Е –њ–Њ—В–Њ–Ї–Њ–≤ –Љ–Њ–ґ–µ—В –±—Л—В—М –Њ—В–Ї–ї—О—З—С–љ –њ–Њ –ґ–µ–ї–∞–љ–Є—О –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—П –≤ —Д–∞–є–ї–µ –Њs_cfg.h, –µ—Б–ї–Є –µ–≥–Њ —Д—Г–љ–Ї—Ж–Є–Є –љ–µ –љ—Г–ґ–љ—Л –і–ї—П –њ—А–Њ–µ–Ї—В–∞. –Ь—Л –≤–Њ—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Б—П –њ–Њ–Ї–∞ –і–µ—Д–Њ–ї—В–љ—Л–Љ–Є —Г—Б—В–∞–љ–Њ–≤–Ї–∞–Љ–Є —Б–Є—Б—В–µ–Љ—Л, –≥–і–µ –≤—Б–µ —Н—В–Є –њ–Њ—В–Њ–Ї–Є —А–∞–Ј—А–µ—И–µ–љ—Л. –°–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–Є–є —Д—А–∞–≥–Љ–µ–љ—В —Д–∞–є–ї–∞ os_cfg.h –њ–Њ–Ї–∞–Ј–∞–љ –љ–Є–ґ–µ. –Ф–ї—П —Б–Њ–Ј–і–∞–љ–Є—П –њ–Њ—В–Њ–Ї–∞, –Ї–Њ–љ—В—А–Њ–ї–Є—А—Г—О—Й–µ–≥–Њ –Љ–Є–≥–∞–љ–Є–µ —Б–≤–µ—В–Њ–і–Є–Њ–і–∞, –Ї–∞–Ї –Є –і–ї—П –ї—О–±–Њ–≥–Њ –і—А—Г–≥–Њ–≥–Њ —Б–Њ–Ј–і–∞–≤–∞–µ–Љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞, —Б–ї–µ–і—Г–µ—В –Њ–њ—А–µ–і–µ–ї–Є—В—М –µ–≥–Њ –њ—А–Є–Њ—А–Є—В–µ—В, –Њ—В–≤–µ—Б—В–Є –њ–Њ–і –љ–µ–≥–Њ –Њ–±–ї–∞—Б—В—М —Б—В–µ–Ї–∞ –Є –Њ–њ—А–µ–і–µ–ї–Є—В—М –Њ–±–ї–∞—Б—В—М –њ–∞–Љ—П—В–Є –њ–Њ–і –µ–≥–Њ TCB (Task Control Block). –Т—Б—С —Н—В–Њ –і–µ–ї–∞–µ—В—Б—П –≤ —Б—В—А–Њ–Ї–∞—Е 18 - 26 —Д–∞–є–ї–∞ main.c. –Ъ–Њ–љ–µ—З–љ–Њ, 512 –±–∞–є—В –і–ї—П —Б—В–µ–Ї–∞ –љ–∞—И–µ–≥–Њ –Љ–Є–Ї—А–Њ-–њ—А–Њ–µ–Ї—В–∞ —Н—В–Њ –њ–µ—А–µ–±–Њ—А, –љ–Њ –і–ї—П –Ь–Ъ –љ–∞ –њ–ї–∞—В–µ, –Є–Љ–µ—О—Й–µ–≥–Њ 256–Ъ –њ–Њ–і RAM –Є 1–Ь —Д–ї–µ—И–∞ –Љ–Њ–ґ–љ–Њ –љ–µ —Н–Ї–Њ–љ–Њ–Љ–Є—В—М –љ–∞ –Љ–µ–ї–Њ—З–∞—Е. –Ю–і–љ–∞–Ї–Њ, –љ–∞—Б–Ї–Њ–ї—М–Ї–Њ —Н—В–Њ –њ–µ—А–µ–±–Њ—А –Є–ї–Є –љ–µ–і–Њ–±–Њ—А –±—Г–і–µ—В –њ–Њ–Ї–∞–Ј–∞–љ–Њ –њ–Њ–Ј–ґ–µ. –Ш–љ–Є—Ж–Є–∞–ї–Є–Ј–∞—Ж–Є—П RTOS –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –≤ —Б—В—А–Њ–Ї–∞—Е 37 – 42 —Д–∞–є–ї–∞ main.c., –Є–Ј –Ї–Њ—В–Њ—А—Л—Е –≤—Л–Ј–Њ–≤ —Д—Г–љ–Ї—Ж–Є–Є –≤ —Б—В—А–Њ–Ї–µ 40 –љ—Г–ґ–µ–љ —В–Њ–ї—М–Ї–Њ –µ—Б–ї–Є –±—Г–і–µ—В –Ј–∞–і–µ–є—Б—В–≤–Њ–≤–∞–љ–∞ —Б–Є—Б—В–µ–Љ–∞ Segger SystemView –і–ї—П –Њ—В–ї–∞–і–Ї–Є. –Ь–∞–Ї—А–Њ—Б—Л APP_RTOS_ASSERT_DBG —Б–ї–µ–і—Г–µ—В —А–∞–Ј–Љ–µ—Й–∞—В—М –њ–Њ—Б–ї–µ –Ї–∞–ґ–і–Њ–≥–Њ –≤—Л–Ј–Њ–≤–∞ —Д—Г–љ–Ї—Ж–Є–є —Б–Є—Б—В–µ–Љ—Л, –Є–Љ–µ–љ–∞ –Ї–Њ—В–Њ—А—Л—Е –љ–∞—З–Є–љ–∞—О—В—Б—П —Б OS. –≠—В–Њ –њ–Њ–Ј–≤–Њ–ї–Є—В –њ—А–Њ—Й–µ –Є –±—Л—Б—В—А–µ–µ –ї–Њ–Ї–∞–ї–Є–Ј–Њ–≤–∞—В—М –њ—А–Њ–±–ї–µ–Љ–љ–Њ–µ –Љ–µ—Б—В–Њ –≤ –Ї–Њ–і–µ –Є –њ—А–Є—З–Є–љ—Г –њ—А–Њ–±–ї–µ–Љ—Л –њ—А–Є –Њ—В–ї–∞–і–Ї–µ. –Ф–ї—П –љ–Њ—А–Љ–∞–ї—М–љ–Њ–є —А–∞–±–Њ—В—Л –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–∞ RTOS —Б–ї–µ–і—Г–µ—В —Б–Њ–Ј–і–∞—В—М –Ї–∞–Ї –Љ–Є–љ–Є–Љ—Г –Њ–і–Є–љ –њ–Њ—В–Њ–Ї. –≠—В–Њ –і–µ–ї–∞–µ—В—Б—П —Д—Г–љ–Ї—Ж–Є–µ–є OSTaskCreate –≤ —Б—В—А–Њ–Ї–µ 44. –Э–µ –±—Г–і—Г –Ј–і–µ—Б—М –Њ–њ–Є—Б—Л–≤–∞—В—М –≤—Б–µ 13 –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ —Н—В–Њ–є —Д—Г–љ–Ї—Ж–Є–Є, —В.–Ї. –≤—Б—С –і–Њ—Б—В–∞—В–Њ—З–љ–Њ –њ–Њ–і—А–Њ–±–љ–Њ –Њ–њ–Є—Б–∞–љ–Њ –≤ –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є–Є –љ–∞ —Б–Є—Б—В–µ–Љ—Г [2]. –Ю—В–Љ–µ—З—Г –ї–Є—И—М, —З—В–Њ “Start Task” – —Н—В–Њ –Є–Љ—П –љ–∞—И–µ–≥–Њ –њ–Њ—В–Њ–Ї–∞ –і–ї—П –Є–і–µ–љ—В–Є—Д–Є–Ї–∞—Ж–Є–Є –µ–≥–Њ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞–Љ–Є –Њ—В–ї–∞–і–Ї–Є. –Э–∞–Ї–Њ–љ–µ—Ж, –њ–Њ—Б–ї–µ —Б–Њ–Ј–і–∞–љ–Є—П –њ–Њ—В–Њ–Ї–Њ–≤ –≤—Л–Ј–Њ–≤–Њ–Љ —Д—Г–љ–Ї—Ж–Є–Є OSStart() –≤ —Б—В—А–Њ–Ї–µ 59 –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –Є–љ–Є—Ж–Є–∞–ї–Є–Ј–∞—Ж–Є—П —А–∞–±–Њ—В—Л –њ–ї–∞–љ–Є—А–Њ–≤—И–Є–Ї–∞ RTOS. –≠—В–∞ –љ–µ–≤–Њ–Ј–≤—А–∞—В–љ–∞—П —Д—Г–љ–Ї—Ж–Є—П, —В–∞–Ї —З—В–Њ –њ–Њ—Б–ї–µ –љ–µ—С –љ–µ –љ—Г–ґ–µ–љ –±–µ—Б–Ї–Њ–љ–µ—З–љ—Л–є —Ж–Є–Ї–ї –і–ї—П –њ—А–µ–і–Њ—В–≤—А–∞—Й–µ–љ–Є—П –≤–Њ–Ј–≤—А–∞—В–∞ –Є–Ј main(). –°—В—А—Г–Ї—В—Г—А–∞ –Ї–Њ–і–∞ –Ї–∞–ґ–і–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ —Б–Њ—Б—В–Њ–Є—В –Є–Ј –Њ–±–ї–∞—Б—В–Є –Є–љ–Є—Ж–Є–∞–ї–Є–Ј–∞—Ж–Є–Є —Б –њ–Њ—Б–ї–µ–і—Г—О—Й–Є–Љ –±–µ—Б–Ї–Њ–љ–µ—З–љ—Л–Љ —Ж–Є–Ї–ї–Њ–Љ, —З—В–Њ –і–µ–ї–∞–µ—В —Д—Г–љ–Ї—Ж–Є—О –њ–Њ—В–Њ–Ї–∞ –љ–µ–≤–Њ–Ј–≤—А–∞—В–љ–Њ–є. –Х—Б–ї–Є –≤ —Е–Њ–і–µ —А–∞–±–Њ—В—Л –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П –њ–Њ—В–Њ–Ї –Њ–Ї–∞–ґ–µ—В—Б—П –±–Њ–ї—М—И–µ –љ–µ–љ—Г–ґ–љ—Л–Љ, –µ–≥–Њ –Љ–Њ–ґ–љ–Њ –±—Г–і–µ—В —Г–і–∞–ї–Є—В—М –Є–Ј —В–∞–±–ї–Є—Ж—Л –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–∞ —Б—А–µ–і—Б—В–≤–∞–Љ–Є RTOS –Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –Ј–∞–љ–Є–Љ–∞–µ–Љ—Г—О –Є–Љ –њ–∞–Љ—П—В—М –њ–Њ–і —Б—В–µ–Ї –Є TCB –і–ї—П –љ—Г–ґ–і –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П. –Т –љ–∞—И–µ–Љ —Б–ї—Г—З–∞–µ —Б—В–∞—А—В–Њ–≤—Л–є –њ–Њ—В–Њ–Ї –Є–љ–Є—Ж–Є–∞–ї–Є–Ј–Є—А—Г–µ—В SysTick —В–∞–є–Љ–µ—А –њ–Њ–і –і–µ—Д–Њ–ї—В–љ—Л–є –њ–µ—А–Є–Њ–і —В–Є–Ї–Њ–≤ –≤ 1–Љ—Б –Є –Њ—Б—В–∞–ї—М–љ—Г—О –њ–µ—А–Є—Д–µ—А–Є—О –і–µ–Љ–Њ-–њ–ї–∞—В—Л –≤—Л–Ј–Њ–≤–Њ–Љ —Д—Г–љ–Ї—Ж–Є–є BSP_TickInit() –Є BSP_OS_Init() –≤ —Б—В—А–Њ–Ї–∞—Е 69 –Є 78, —З—В–Њ –Љ–Њ–ґ–љ–Њ –і–µ–ї–∞—В—М –Є –≤ main(). –Ф–∞–ї–µ–µ, –≤ –±–µ—Б–Ї–Њ–љ–µ—З–љ–Њ–Љ —Ж–Є–Ї–ї–µ –Љ—Л –Є–љ–≤–µ—А—В–Є—А—Г–µ–Љ —Б–Њ—Б—В–Њ—П–љ–Є–µ —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –≤ —Б—В—А–Њ–Ї–µ 83, –њ–Њ–ї—Г—З–∞–µ–Љ –µ–≥–Њ —В–µ–Ї—Г—Й–µ–µ —Б–Њ—Б—В–Њ—П–љ–Є–µ –≤ —Б—В—А–Њ–Ї–µ 84 (–Є—Б–Ї–ї—О—З–Є—В–µ–ї—М–љ–Њ –і–ї—П –і–µ–Љ–Њ–љ—Б—В—А–∞—Ж–Є–Є –љ–Є–ґ–µ) –Є –≤—Л–Ј—Л–≤–∞–µ–Љ –њ—А–Њ–≥—А–∞–Љ–Љ–љ—Г—О –Ј–∞–і–µ—А–ґ–Ї—Г –љ–∞ –і–ї–Є—В–µ–ї—М–љ–Њ—Б—В—М –њ–µ—А–Є–Њ–і–∞ –Љ–Є–≥–∞–љ–Є—П –≤ —Б—В—А–Њ–Ї–µ 85. –Т—Л–Ј–Њ–≤ —Д—Г–љ–Ї—Ж–Є–Є OSTimeDelay(), –≤ —Б–≤–Њ—О –Њ—З–µ—А–µ–і—М, –≤—Л–Ј—Л–≤–∞–µ—В –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї —Б–Є—Б—В–µ–Љ—Л, –∞ —Б–∞–Љ –њ–Њ—В–Њ–Ї –њ–µ—А–µ—Е–Њ–і–Є—В –≤ –љ–µ–∞–Ї—В–Є–≤–љ–Њ–µ —Б–Њ—Б—В–Њ—П–љ–Є–µ (Pending). –Т–Њ–Ј–≤—А–∞—В –њ–Њ—В–Њ–Ї–∞ –≤ —Б–Њ—Б—В–Њ—П–љ–Є–µ –≥–Њ—В–Њ–≤–љ–Њ—Б—В–Є (Ready) –њ—А–Њ–Є–Ј–≤–µ–і—С—В—Б—П –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є –њ–Њ –Є—Б—В–µ—З–µ–љ–Є—О –≤—А–µ–Љ–µ–љ–Є –Ј–∞–і–µ—А–ґ–Ї–Є, –∞ —Б–∞–Љ –њ–Њ—В–Њ–Ї –њ—А–Њ–і–Њ–ї–ґ–Є—В –≤—Л–њ–Њ–ї–љ–µ–љ–Є–µ –≤ —Б–Њ—Б—В–Њ—П–љ–Є–Є Running, –Ї–Њ–≥–і–∞ –і–Њ –љ–µ–≥–Њ –і–Њ–є–і—С—В –Њ—З–µ—А–µ–і—М –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–∞. –Ю—В–Љ–µ—З—Г –≤–Њ–Ј–Љ–Њ–ґ–љ—Г—О –љ–µ–±–Њ–ї—М—И—Г—О –њ—Г—В–∞–љ–Є—Ж—Г –≤ —В–µ—А–Љ–Є–љ–Њ–ї–Њ–≥–Є–Є. –Э–∞ —П–Ј—Л–Ї–µ –° –њ–Њ—В–Њ–Ї–Є —А–µ–∞–ї–Є–Ј—Г—О—В—Б—П –Ї–∞–Ї —Д—Г–љ–Ї—Ж–Є–Є, –Є –≤ —Н—В–Њ–Љ —Б–Љ—Л—Б–ї–µ –≤—Б–µ –њ–Њ—В–Њ–Ї–Є —Г–ґ–µ —Б–Њ–Ј–і–∞–љ—Л –љ–∞ —Н—В–∞–њ–µ –Ї–Њ–Љ–њ–Є–ї—П—Ж–Є–Є. –Ю–і–љ–∞–Ї–Њ, –њ—А–Є —Н—В–Њ–Љ –Њ–љ–Є –љ–∞—Е–Њ–і—П—В—Б—П –≤ —Б–Њ—Б—В–Њ—П–љ–Є–Є Dormant –Є –љ–µ –≤–Ї–ї—О—З–∞—О—В—Б—П –≤ –Њ—З–µ—А–µ–і—М –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–∞ –і–Њ –≤—Л–Ј–Њ–≤–∞ —Д—Г–љ–Ї—Ж–Є–Є OSTaskCreate(), –Њ–і–љ–Є–Љ –Є–Ј –њ–∞—А–∞–Љ–µ—В–Њ–≤ –Ї–Њ—В–Њ—А–Њ–є –±—Г–і–µ—В —Г–Ї–∞–Ј–∞—В–µ–ї—М –љ–∞ —Д—Г–љ—Ж–Є—О –њ–Њ—В–Њ–Ї–∞, –≤ —А–µ–Ј—Г–ї—М—В–∞—В–µ —З–µ–≥–Њ –њ–Њ—В–Њ–Ї –њ–µ—А–µ–є–і—С—В –≤ —Б–Њ—Б—В–Њ—П–љ–Є–µ Ready. –°–Њ—Б—В–Њ—П–љ–Є–µ –њ–Њ—В–Њ–Ї–∞ —Б–Њ—Е—А–∞–љ—П–µ—В—Б—П –≤ –Њ–±–ї–∞—Б—В–Є –µ—В–Њ TCB. –Э–Є–ґ–µ –њ–Њ–Ї–∞–Ј–∞–љ—Л –≤—Б–µ –≤–Њ–Ј–Љ–Њ–ґ–љ—Л–µ —Б–Њ—Б—В–Њ—П–љ–Є—П –њ–Њ—В–Њ–Ї–Њ–≤ –≤ Micriµm OS –Є —Г—Б–ї–Њ–≤–Є—П –Љ–Є–≥—А–∞—Ж–Є–Є –Љ–µ–ґ–і—Г —Н—В–Є–Љ–Є —Б–Њ—Б—В–Њ—П–љ–Є—П–Љ–Є. –Я—А–Њ–Є–ї–ї—О—Б—В—А–Є—А—Г–µ–Љ —А–∞–±–Њ—В—Г –љ–∞—И–µ–≥–Њ –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П —Б –њ–Њ–Љ–Њ—Й—М—О –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ µC/Probe, –≤—Е–Њ–і—П—Й–µ–≥–Њ –≤ —Б–Њ—Б—В–∞–≤ Simplicity Studio. –Ш–љ—Б—В—А—Г–Љ–µ–љ—В —Н—В–Њ—В –і–Њ—Б—В—Г–њ–µ–љ –і–ї—П —Б–≤–Њ–±–Њ–і–љ–Њ–є –Ј–∞–≥—А—Г–Ј–Ї–Є —Б —Б–∞–є—В–∞ Micrium –Є —А–∞–±–Њ—В–Њ—Б–њ–Њ—Б–Њ–±–µ–љ —Б FreeRTOS –Є –і—А—Г–≥–Є–Љ–Є –Ь–Ъ. –Ю–і–љ–∞–Ї–Њ, –≤—А–µ–Љ—П —А–∞–±–Њ—В—Л —Б–≤–Њ–±–Њ–і–љ–Њ–є –≤–µ—А—Б–Є–Є —Н—В–Њ–≥–Њ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ –Њ–≥—А–∞–љ–Є—З–µ–љ–Њ 1 –Љ–Є–љ—Г—В–Њ–є –њ–Њ—Б–ї–µ –Ї–∞–ґ–і–Њ–≥–Њ –Ј–∞–њ—Г—Б–Ї–∞ (–њ–Њ –Є—Б—В–µ—З–µ–љ–Є–Є –Љ–Є–љ—Г—В—Л –µ–≥–Њ –Љ–Њ–ґ–љ–Њ –њ–µ—А–µ–Ј–∞–њ—Г—Б—В–Є—В—М), –Є –љ–µ–Ї–Њ—В–Њ—А—Л–µ —Д—Г–љ–Ї—Ж–Є–Є –≤ —Б–≤–Њ–±–Њ–і–љ–Њ–є –≤–µ—А—Б–Є–Є –љ–µ–і–Њ—Б—В—Г–њ–љ—Л. –Ш—Б–њ–Њ–ї—М–Ј—Г–µ–Љ —Б–љ–∞—З–∞–ї–∞ —Н—В–Њ—В –Є–љ—Б—В—А—Г–Љ–µ–љ—В –і–ї—П –Є–Ј–Љ–µ–љ–µ–љ–Є—П –њ–µ—А–Є–Њ–і–∞ –Љ–Є–≥–∞–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –Є –Є–љ–і–Є–Ї–∞—Ж–Є–Є –µ–≥–Њ —Б–Њ—Б—В–Њ—П–љ–Є—П. –Ф–ї—П —Н—В–Њ–≥–Њ –Ї–ї–Є–Ї–∞–µ–Љ –љ–∞ –Ї–љ–Њ–њ–Ї—Г ELF –Є –≤ –Њ—В–Ї—А—Л–≤—И–µ–Љ—Б—П –Њ–Ї–љ–µ –≤—Л–±–Є—А–∞–µ–Љ —Д–∞–є–ї RTOS_blink_Probe.asf –Є–Ј –њ–∞–њ–Ї–Є Binaries –њ—А–Њ–µ–Ї—В–∞. –Ґ–µ–Љ —Б–∞–Љ—Л–Љ –Љ—Л –њ–Њ–ї—Г—З–Є–Љ –і–Њ—Б—В—Г–њ –Ї–Њ –≤—Б–µ–Љ –≥–ї–Њ–±–∞–ї—М–љ—Л–Љ –њ–µ—А–µ–Љ–µ–љ–љ—Л–Љ —Б–Є—Б—В–µ–Љ—Л. –Э–∞–Љ –њ–Њ—В—А–µ–±—Г—О—В—Б—П –њ–µ—А–µ–Љ–µ–љ–љ—Л–µ period –Є LED_state –Є–Ј —Д–∞–є–ї–∞ main.c. –Ф–ї—П –Є–Ј–Љ–µ–љ–µ–љ–Є—П –њ–µ—А–Є–Њ–і–∞ –Њ—А–≥–∞–љ–Є–Ј—Г–µ–Љ —Б–ї–∞–є–і–µ—А, –њ–µ—А–µ—В–∞—Й–Є–≤ –µ–≥–Њ –Є–Ј –њ–∞–љ–µ–ї–Є Gauges —Б–ї–µ–≤–∞ –љ–∞ –њ–∞–љ–µ–ї—М DataScreen1. –Ґ–∞–Ї–ґ–µ –њ–µ—А–µ—В–∞—Й–Є–Љ —В—Г–і–∞ –Є–Ї–Њ–љ—Г LED –Є–Ј –њ–∞–љ–µ–ї–Є Miscellaneous. –Ф–∞–ї–µ–µ, –њ–µ—А–µ—В–∞—Й–Є–Љ –Љ—Л—И–Ї–Њ–є —Б–Є–Љ–≤–Њ–ї period –Є–Ј –Њ–Ї–љ–∞ Symbol Browser –љ–∞ –љ–∞—И —Б–ї–∞–є–і–µ—А. –Ґ–µ–Љ —Б–∞–Љ—Л–Љ —Б–ї–∞–є–і–µ—А –±—Г–і–µ—В –љ–∞—Б—В—А–Њ–µ–љ –љ–∞ —А–∞–±–Њ—В—Г —Б —Н—В–Њ–є –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є –Є –µ—С –Є–Љ—П –њ–Њ—П–≤–Є—В—Б—П –њ–Њ–і —Б–ї–∞–є–і–µ—А–Њ–Љ. –Р–љ–∞–ї–Њ–≥–Є—З–љ–Њ –љ–∞—Б—В—А–Њ–Є–Љ —Б–≤–µ—В–Њ–і–Є–Њ–і –љ–∞ —А–∞–±–Њ—В—Г —Б –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є LED_state. –Т—Б–µ –љ–∞—Б—В—А–Њ–є–Ї–Є —Г–ґ–µ –≤—Л–њ–Њ–ї–љ–µ–љ—Л –≤ –њ—А–Є–ї–∞–≥–∞–µ–Љ–Њ–Љ –∞—А—Е–Є–≤–µ, –њ–Њ–і—А–Њ–±–љ–Њ—Б—В–Є —Б–Љ–Њ—В—А–Є –≤ –Љ–∞–љ—Г–∞–ї–µ –љ–∞ —Б–Є—Б—В–µ–Љ—Г. –Ч–∞–њ—Г—Б—В–Є–≤ –Є–љ—Б—В—А—Г–Љ–µ–љ—В –Ї–љ–Њ–њ–Ї–Њ–є Run, —Г–≤–Є–і–Є–Љ –Љ–µ–ї—М–Ї–∞–љ–Є–µ —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –љ–∞ –њ–∞–љ–µ–ї–Є —Б–Є–љ—Е—А–Њ–љ–љ–Њ —Б–Њ —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–Љ –љ–∞ –њ–ї–∞—В–µ –Є —Б–Љ–Њ–ґ–µ–Љ –Њ–њ–µ—А–∞—В–Є–≤–љ–Њ –Є–Ј–Љ–µ–љ—П—В—М –њ–µ—А–Є–Њ–і –Љ–Є–≥–∞–љ–Є—П —Б–ї–∞–є–і–µ—А–Њ–Љ —Б —Г–Ї–∞–Ј–∞–љ–Є–µ–Љ –µ–≥–Њ —В–µ–Ї—Г—Й–µ–≥–Њ –Ј–љ–∞—З–µ–љ–Є—П. –≠—В–Њ—В –Є–љ—Б—В—А—Г–Љ–µ–љ—В –Љ–Њ–ґ–µ—В —А–∞–±–Њ—В–∞—В—М –Є –≤ –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П—Е –±–µ–Ј RTOS. –Ь—Л, —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –њ—А–Њ—Б—В–Њ –њ–Њ–ї—Г—З–Є–Љ –≥—А–∞—Д–Є—З–µ—Б–Ї–Є–є –Є–љ—В–µ—А—Д–µ–є—Б –і–ї—П –Њ–њ–µ—А–∞—В–Є–≤–љ–Њ–≥–Њ –Є–Ј–Љ–µ–љ–µ–љ–Є—П –Є –Њ—В–Њ–±—А–∞–ґ–µ–љ–Є—П –њ–µ—А–µ–Љ–µ–љ–љ—Л—Е. –Ъ–∞—Б–∞—В–µ–ї—М–љ–Њ RTOS, –і–Њ–±–∞–≤–Є–Љ —Б–µ–ї–µ–Ї—В–Њ—А–Њ–Љ Insert Screens –≤ Workspace Explorer –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ –Њ–Ї–љ–Њ, —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–µ–µ Micriµm OS Kernel. –Я–Њ—Б–ї–µ –Ј–∞–њ—Г—Б–Ї–∞ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ –Ї–љ–Њ–њ–Ї–Њ–є Run –Є –≤—Л–±–Њ—А–∞ –Ј–∞–Ї–ї–∞–і–Ї–Є Micriµm OS Kernel, —Г–≤–Є–і–Є–Љ —Б—В–∞—В–Є—Б—В–Є–Ї—Г –≤—Б–µ—Е –њ–Њ—В–Њ–Ї–Њ–≤ –љ–∞—И–µ–≥–Њ –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П. –Ш–Ј –љ–µ—С, –≤ —З–∞—Б—В–љ–Њ—Б—В–Є, –≤—Л—В–µ–Ї–∞–µ—В, —З—В–Њ –љ–µ –Њ–і–Є–љ –Є–Ј —Б—В–µ–Ї–Њ–≤ –њ–Њ—В–Њ–Ї–Њ–≤ –љ–µ –њ–µ—А–µ–њ–Њ–ї–љ—П–µ—В—Б—П –≤ –њ—А–Њ—Ж–µ—Б—Б–µ —А–∞–±–Њ—В—Л –Є –Љ—Л –Њ—В–≤–µ–ї–Є —Б–ї–Є—И–Ї–Њ–Љ –Љ–љ–Њ–≥–Њ –њ–∞–Љ—П—В–Є –њ–Њ–і —Б—В–µ–Ї –њ–Њ—В–Њ–Ї–∞ Start Task. –†–∞–±–Њ—В—Г –њ–Њ—В–Њ–Ї–Њ–≤ –љ–∞—И–µ–≥–Њ –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П –Љ–Њ–ґ–љ–Њ —В–∞–Ї–ґ–µ –≤–Є–Ј—Г–∞–ї—М–љ–Њ –њ—А–Њ–Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М —Б –њ–Њ–Љ–Њ—Й—М—О —Б–Є—Б—В–µ–Љ—Л SystemView —Д–Є—А–Љ—Л Segger, –Є–љ—В–µ–≥—А–Є—А–Њ–≤–∞–љ–љ–Њ–є –≤ Simplicity Studio. –°–Є—Б—В–µ–Љ–∞ —Н—В–∞ —В–Њ–ґ–µ –і–Њ—Б—В—Г–њ–љ–∞ –і–ї—П —Б–≤–Њ–±–Њ–і–љ–Њ–є –Ј–∞–≥—А—Г–Ј–Ї–Є —Б –≤–µ–±—Б–∞–є—В–∞ —Д–Є—А–Љ—Л –Є –Љ–Њ–ґ–µ—В —А–∞–±–Њ—В–∞—В—М —Б –і—А—Г–≥–Є–Љ–Є IDE –Є –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞–Љ–Є. –Ч–∞–њ—Г—Б—В–Є–Љ —Б–Є—Б—В–µ–Љ—Г –Є–Ј –Љ–µ–љ—О Simplicity Studio –Є –і–∞–і–Є–Љ –µ–є –њ–Њ—А–∞–±–Њ—В–∞—В—М –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ —Б–µ–Ї—Г–љ–і –і–ї—П —Б–±–Њ—А–∞ —Б—В–∞—В–Є—Б—В–Є–Ї–Є. –Ю—Б—В–∞–љ–Њ–≤–Є–≤ –Ј–∞–њ–Є—Б—М, –њ—А–Њ–∞–љ–∞–ї–Є–Ј–Є—А—Г–µ–Љ —Е–Њ–і —А–∞–±–Њ—В—Л –њ–Њ—В–Њ–Ї–Њ–≤, —А–∞—Б—В—П–љ—Г–≤ –≤—А–µ–Љ–µ–љ–љ—Г—О –Њ—Б—М –Љ—Л—И–Ї–Њ–є. –Т —А–µ–Ј—Г–ї—М—В–∞—В–µ —Г–≤–Є–і–Є–Љ –њ–Њ—Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ—Б—В—М –≤—Л–Ј–Њ–≤–Њ–≤ —Д—Г–љ–Ї—Ж–Є–є –њ–Њ—В–Њ–Ї–Њ–≤ –Є –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–∞ –≤ —А–µ–∞–ї—М–љ–Њ–Љ –≤—А–µ–Љ–µ–љ–Є. –Ш–Ј –љ–µ—С –≤—Л—В–µ–Ї–∞–µ—В, —З—В–Њ –Ї–∞–ґ–і—Г—О –Љ–Є–ї–ї–Є—Б–µ–Ї—Г–љ–і—Г –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –∞–њ–њ–∞—А–∞—В–љ–Њ–µ –њ—А–µ—А—Л–≤–∞–љ–Є–µ —В–∞–є–Љ–µ—А–∞ (SysTask IRQ), –Њ–њ—А–µ–і–µ–ї—П—О—Й–µ–≥–Њ «—В–Є–Ї–Є» —Б–Є—Б—В–µ–Љ—Л —Б –њ–Њ—Б–ї–µ–і—Г—О—Й–Є–Љ –≤—Л–Ј–Њ–≤–Њ–Љ —Б–ї—Г–ґ–µ–±–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ Tick Task. –Ґ–∞–Ї–ґ–µ —Г–≤–Є–і–Є–Љ –Ї–Њ–≥–і–∞ –≤—Л–Ј—Л–≤–∞–ї—Б—П –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї (Scheduler) –Є –њ–Њ–ї—Г—З–Є–Љ –Ї—Г—З—Г —Б—В–∞—В–Є—Б—В–Є–Ї–Є –Њ —А–∞–±–Њ—В–µ –≤—Б–µ—Е –њ–Њ—В–Њ–Ї–Њ–≤ –Є –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П –≤ —Ж–µ–ї–Њ–Љ, —З—В–Њ –њ—А–Њ—Б—В–Њ –±–µ–Ј—Ж–µ–љ–љ–Њ –і–ї—П –Њ—В–ї–∞–і–Ї–Є. –†–∞–±–Њ—В–∞ —Б —Б–µ–Љ–∞—Д–Њ—А–∞–Љ–Є –°–µ–Љ–∞—Д–Њ—А—Л —П–≤–ї—П—О—В—Б—П —Б—В–∞–љ–і–∞—А—В–љ—Л–Љ —Б—А–µ–і—Б—В–≤–Њ–Љ —Б–Є–љ—Е—А–Њ–љ–Є–Ј–∞—Ж–Є–Є –њ–Њ—В–Њ–Ї–Њ–≤ –≤ –ї—О–±–Њ–є –Ю–°. –Т Micriµm OS –і–ї—П —Н—В–Њ–≥–Њ –Є–Љ–µ—О—В—Б—П –і–≤–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є – –Ј–∞–і–µ–є—Б—В–≤–Њ–≤–∞—В—М —Б–µ–Љ–∞—Д–Њ—А —Г–ґ–µ –≤—Б—В—А–Њ–µ–љ–љ—Л–є –≤ TCB (Task Control Block) –Ї–∞–ґ–і–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ –Є–ї–Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –≤–љ–µ—И–љ–Є–є —Б–µ–Љ–∞—Д–Њ—А. –Т –њ–µ—А–≤–Њ–Љ —Б–ї—Г—З–∞–µ –њ–Њ–ї—Г—З–∞–µ–Љ –љ–µ–Ї–Њ—В–Њ—А—Г—О —Н–Ї–Њ–љ–Њ–Љ–Є—О –њ–∞–Љ—П—В–Є. –Ю–і–љ–∞–Ї–Њ, —Б–µ–Љ–∞—Д–Њ—А —Н—В–Њ—В –Љ–Њ–ґ–µ—В –±—Л—В—М –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ —В–Њ–ї—М–Ї–Њ –і–ї—П –Ї–Њ–љ—В—А–Њ–ї—П –Њ–і–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ (–µ–≥–Њ —Е–Њ–Ј—П–Є–љ–∞). –Т–Њ –≤—В–Њ—А–Њ–Љ —Б–ї—Г—З–∞–µ –њ–Њ–ї—Г—З–Є–Љ –љ–µ–±–Њ–ї—М—И–Њ–є –њ—А–Њ–Є–≥—А—Л—И –њ–Њ –њ–∞–Љ—П—В–Є –Є –≤—А–µ–Љ–µ–љ–Є, –љ–Њ —Б–Љ–Њ–ґ–µ–Љ –Њ–і–љ–Є–Љ —Б–µ–Љ–∞—Д–Њ—А–Њ–Љ –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –њ–Њ—В–Њ–Ї–Њ–≤. –Я—А–Њ–Є–ї–ї—О—Б—В—А–Є—А—Г–µ–Љ –Њ–±–∞ –њ–Њ–і—Е–Њ–і–∞ –љ–∞ –њ—А–Њ—Б—В–Њ–Љ –њ—А–Є–Љ–µ—А–µ —Б–Є–љ—Е—А–Њ–љ–Є–Ј–∞—Ж–Є–Є –і–≤—Г—Е –њ–Њ—В–Њ–Ї–Њ–≤. –Ю–і–Є–љ –Є–Ј –љ–Є—Е (LampTask) –±—Г–і–µ—В –Њ–ґ–Є–і–∞—В—М –Њ—В–Ї—А—Л—В–Є—П —Б–µ–Љ–∞—Д–Њ—А–∞ –і—А—Г–≥–Є–Љ –њ–Њ—В–Њ–Ї–Њ–Љ –і–ї—П –Є–Ј–Љ–µ–љ–µ–љ–Є—П —Б–Њ—Б—В–Њ—П–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–∞. –Ф—А—Г–≥–Њ–є –њ–Њ—В–Њ–Ї (ButtonTask) –±—Г–і–µ—В –Љ–Њ–љ–Є—В–Њ—А–Є—В—М —Б–Њ—Б—В–Њ—П–љ–Є–µ –Ї–љ–Њ–њ–Ї–Є –љ–∞ –і–µ–Љ–Њ-–њ–ї–∞—В–µ –Є –Њ—В–Ї—А—Л–≤–∞—В—М —Б–µ–Љ–∞—Д–Њ—А –њ–Њ—В–Њ–Ї–∞ —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –њ–Њ –µ—С –љ–∞–ґ–∞—В–Є—О. –Ш–љ—Л–Љ–Є —Б–ї–Њ–≤–∞–Љ–Є, —Б–Њ—Б—В–Њ—П–љ–Є–µ —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –љ–∞ –њ–ї–∞—В–µ –±—Г–і–µ—В –Є–Ј–Љ–µ–љ—П—В—М—Б—П –њ—А–Є –Ї–∞–ґ–і–Њ–Љ –љ–∞–ґ–∞—В–Є–Є –Ї–љ–Њ–њ–Ї–Є. –°–Њ–Ј–і–∞—С–Љ –Њ–±–∞ –њ–Њ—В–Њ–Ї–∞ –Ї–∞–Ї –±—Л–ї–Њ –Њ–њ–Є—Б–∞–љ–Њ –≤—Л—И–µ –≤ StartTask (—Н—В–Њ –Љ–Њ–ґ–љ–Њ –і–µ–ї–∞—В—М –Є –≤ main()), –≤—Л–і–µ–ї–Є–≤ –њ–Њ–і –Ї–∞–ґ–і—Л–є –Є–Ј –љ–Є—Е –Њ–±–ї–∞—Б—В–Є –≤ –њ–∞–Љ—П—В–Є –њ–Њ–і —Б—В–µ–Ї –Є TCB. –Ъ–Њ–і –њ–Њ—В–Њ–Ї–∞ —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –њ–Њ–Ї–∞–Ј–∞–љ –љ–Є–ґ–µ. –§—Г–љ–Ї—Ж–Є—П OSTaskSemPend() –њ—А–Њ–≤–µ—А—П—В —Б–Њ—Б—В–Њ—П–љ–Є–µ —Б–µ–Љ–∞—Д–Њ—А–∞ –њ–Њ—В–Њ–Ї–∞ –Є –µ—Б–ї–Є –Њ–љ –Ј–∞–Ї—А—Л—В (–Ј–љ–∞—З–µ–љ–Є–µ –µ–≥–Њ –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є =0), —В–Њ –њ–Њ—В–Њ–Ї –њ–µ—А–µ–≤–Њ–і–Є—В—Б—П –Ю–° –≤ —Б–Њ—Б—В–Њ—П–љ–Є–µ Pending. –Я–µ—А–≤—Л–є –њ–∞—А–∞–Љ–µ—В—А –≤ —Н—В–Њ–є API –Њ–њ—А–µ–і–µ–ї—П–µ—В —В–∞–є–Љ–∞—Г—В – —Б–Ї–Њ–ї—М–Ї–Њ –њ–Њ –≤—А–µ–Љ–µ–љ–Є –ґ–і–∞—В—М –њ–Њ—В–Њ–Ї—Г –Њ—В–Ї—А—Л—В–Є—П —Б–µ–Љ–∞—Д–Њ—А–∞ (–µ—Б–ї–Є 0, —В–Њ –ґ–і–∞—В—М –љ–µ–Њ–≥—А–∞–љ–Є—З–µ–љ–љ–Њ). –Я—А–Є —Н—В–Њ–Љ —В—А–µ—В–Є–є –њ–∞—А–∞–Љ–µ—В—А –і–Њ–ї–ґ–µ–љ –±—Л—В—М —Г–Ї–∞–Ј–∞—В–µ–ї–µ–Љ –љ–∞ –њ–µ—А–µ–Љ–µ–љ–љ—Г—О, –≥–і–µ —Б–Њ—Е—А–∞–љ–Є—В—Б—П –Њ—В–Љ–µ—В–Ї–∞ –≤—А–µ–Љ–µ–љ–Є (timestamp) –Њ—В–Ї—А—Л—В–Є—П —Б–µ–Љ–∞—Д–Њ—А–∞ (0 –µ—Б–ї–Є —Б–Њ—Е—А–∞–љ—П—В—М –љ–µ –љ—Г–ґ–љ–Њ). –Х—Б–ї–Є —Б–µ–Љ–∞—Д–Њ—А –Њ–Ї–∞–ґ–µ—В—Б—П –Њ—В–Ї—А—Л—В—Л–Љ, —В–Њ –µ–≥–Њ –њ–µ—А–µ–Љ–µ–љ–љ–∞—П –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є —Г–≤–µ–ї–Є—З–Є–≤–∞–µ—В—Б—П –љ–∞ 1 –Є –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –≤—Л—Е–Њ–і –Є–Ј —Д—Г–љ–Ї—Ж–Є–Є —Б –њ–µ—А–µ–і–∞—З–µ–є —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–ї–µ–і—Г—О—Й–µ–є –Є–љ—Б—В—А—Г–Ї—Ж–Є–Є (–≤ —Б—В—А–Њ–Ї–µ 177). –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –µ—Б–ї–Є –Ј–љ–∞—З–µ–љ–Є–µ –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є —Б–µ–Љ–∞—Д–Њ—А–∞ –≤ –Љ–Њ–Љ–µ–љ—В –Њ—В–Ї—А—Л—В–Є—П —А–∞–≤–љ–Њ 0, —В–Њ –њ–Њ—В–Њ–Ї —Б–∞–Љ —Б–µ–±—П –±–ї–Њ–Ї–Є—А—Г–µ—В –њ–Њ—Б–ї–µ –µ–і–Є–љ–Є—З–љ–Њ–≥–Њ –Є–Ј–Љ–µ–љ–µ–љ–Є—П —Б–Њ—Б—В–Њ—П–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–∞. –Я–Њ—Б–ї–µ —Б–Њ–Ј–і–∞–љ–Є—П –њ–Њ—В–Њ–Ї–∞ –Ј–љ–∞—З–µ–љ–Є–µ –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є –µ–≥–Њ —Б–µ–Љ–∞—Д–Њ—А–∞ —А–∞–≤–љ–Њ 0. –Т—Б—В—А–Њ–µ–љ–љ—Л–Љ –≤ –њ–Њ—В–Њ–Ї —Б–µ–Љ–∞—Д–Њ—А–Њ–Љ –Љ–Њ–ґ–љ–Њ –±–ї–Њ–Ї–Є—А–Њ–≤–∞—В—М —В–Њ–ї—М–Ї–Њ —Б–∞–Љ —Н—В–Њ—В –њ–Њ—В–Њ–Ї –Є –љ–Є–Ї–∞–Ї–Њ–є –±–Њ–ї–µ–µ, –≤ —В–Њ –≤—А–µ–Љ—П –Ї–∞–Ї –Њ—В–Ї—А—Л—В—М –≤—Б—В—А–Њ–µ–љ–љ—Л–є –≤ –њ–Њ—В–Њ–Ї —Б–µ–Љ–∞—Д–Њ—А –Љ–Њ–ґ–µ—В –ї—О–±–Њ–є –і—А—Г–≥–Њ–є –њ–Њ—В–Њ–Ї. –Ъ–Њ–і –њ–Њ—В–Њ–Ї–∞ –Ї–љ–Њ–њ–Ї–Є –≤—Л–Ј—Л–≤–∞–µ—В—Б—П –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–Њ–Љ RTOS –Ї–∞–ґ–і—Л–µ 100–Љ—Б –і–ї—П –Є—Б–Ї–ї—О—З–µ–љ–Є—П –≤–ї–Є—П–љ–Є—П –і—А–µ–±–µ–Ј–≥–∞ –µ—С –Ї–Њ–љ—В–∞–Ї—В–Њ–≤ –љ–∞ —Д—Г–љ–Ї—Ж–Є–Њ–љ–Є—А–Њ–≤–∞–љ–Є–µ. –Я–Њ—В–Њ–Ї —А–µ–∞–ї–Є–Ј—Г–µ—В –Ї–Њ–љ–µ—З–љ—Л–є –∞–≤—В–Њ–Љ–∞—В —Б–Њ—Б—В–Њ—П–љ–Є–є –Ї–љ–Њ–њ–Ї–Є, –≤ —А–µ–Ј—Г–ї—М—В–∞—В–µ —З–µ–≥–Њ –њ—А–Є–ї–Њ–ґ–µ–љ–Є–µ –Ї–∞–ґ–і—Л–є —А–∞–Ј –і–Њ–ґ–Є–і–∞–µ—В—Б—П –љ–∞–ґ–∞—В–Є—П –Ї–љ–Њ–њ–Ї–Є –і–ї—П –Є–Ј–Љ–µ–љ–µ–љ–Є—П —Б–Њ—Б—В–Њ—П–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –Є –±–Њ–ї–µ–µ –љ–µ –Є–Ј–Љ–µ–љ—П–µ—В –µ–≥–Њ –µ—Б–ї–Є –њ—А–Њ–і–Њ–ї–ґ–∞—В—М –љ–∞–ґ–Є–Љ–∞—В—М –љ–∞ –Ї–љ–Њ–њ–Ї—Г. –Ъ–∞–Ї —В–Њ–ї—М–Ї–Њ –љ–∞–ґ–∞—В–Є–µ –Ї–љ–Њ–њ–Ї–Є –њ—А–Њ–Є–Ј–Њ–є–і—С—В, –Њ—В–Ї—А—Л–≤–∞–µ—В—Б—П —Б–µ–Љ–∞—Д–Њ—А —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –≤—Л–Ј–Њ–≤–Њ–Љ —Д—Г–љ–Ї—Ж–Є–Є OSTaskSemPost() –≤ —Б—В—А–Њ–Ї–µ 153, –Ї–Њ—В–Њ—А–∞—П —Г–Љ–µ–љ—М—И–∞–µ—В –љ–∞ 1 –Ј–љ–∞—З–µ–љ–Є–µ –µ–≥–Њ –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є. –Х—Б–ї–Є –≤–Љ–µ—Б—В–Њ –≤—Б—В—А–Њ–µ–љ–љ–Њ–≥–Њ –≤ TCB —Б–µ–Љ–∞—Д–Њ—А–∞ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –≤–љ–µ—И–љ–Є–є, —В–Њ —Б–ї–µ–і—Г–µ—В —А–∞—Б–Ї–Њ–Љ–Љ–µ–љ—В–Є—А–Њ–≤–∞—В—М —Б—В—А–Њ–Ї–Є 141, 152, 175 –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П –Є –Ј–∞–Ї–Њ–Љ–Љ–µ–љ—В–Є—А–Њ–≤–∞—В—М —Б—В—А–Њ–Ї–Є 153 –Є 176. –Я—А–Є —Н—В–Њ–Љ —Б—В—А–Њ–Ї–Њ–є 141 –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П —Б–Њ–Ј–і–∞–љ–Є–µ –≥–ї–Њ–±–∞–ї—М–љ–Њ–≥–Њ –Њ–±—К–µ–Ї—В–∞ —Б–µ–Љ–∞—Д–Њ—А–∞, –Ї–Њ—В–Њ—А—Л–є –±—Г–і–µ—В –і–Њ—Б—В—Г–њ–µ–љ –≤—Б–µ–Љ –њ–Њ—В–Њ–Ї–∞–Љ –њ–Њ—Б—А–µ–і—Б—В–≤–Њ–Љ API —Д—Г–љ–Ї—Ж–Є–є OSSemPost() –Є OSSemPend(). –†–∞–±–Њ—В–∞ —Б —Д–ї–∞–≥–∞–Љ–Є –Я–Њ–Љ–Є–Љ–Њ —Б–µ–Љ–∞—Д–Њ—А–Њ–≤ –≤ Micriµm OS –Є–Љ–µ–µ—В—Б—П –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–∞—П –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М —Б–Є–љ—Е—А–Њ–љ–Є–Ј–∞—Ж–Є–Є –њ–Њ—В–Њ–Ї–Њ–≤ —Б –њ–Њ–Љ–Њ—Й—М—О —Д–ї–∞–≥–Њ–≤ —Б–Њ–±—Л—В–Є–є, —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–Є–Љ —А–∞–Ј–ї–Є—З–љ—Л–Љ —Б–Њ–±—Л—В–Є—П–Љ –Є —Б–Є–≥–љ–∞–ї–∞–Љ –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П. –§–ї–∞–≥–Є –Љ–Њ–ґ–љ–Њ –Ї–Њ–Љ–±–Є–љ–Є—А–Њ–≤–∞—В—М –ї–Њ–≥–Є—З–µ—Б–Ї–Є–Љ–Є —Д—Г–љ–Ї—Ж–Є—П–Љ–Є –Ш/–Ш-–Э–Х/–Ш–Ы–Ш/–Ш–Ы–Ш-–Э–Х –і–ї—П –±–ї–Њ–Ї–Є—А–Њ–≤–Ї–Є –Є–ї–Є —А–∞–Ј—А–µ—И–µ–љ–Є—П —А–∞–±–Њ—В—Л –њ–Њ—В–Њ–Ї–Њ–≤ —Б—А–µ–і—Б—В–≤–∞–Љ–Є –Ю–°. –Э–Є–ґ–µ –њ–Њ–Ї–∞–Ј–∞–љ –њ—А–Є–Љ–µ—А –њ—А–Є–Љ–µ–љ–µ–љ–Є—П —Д–ї–∞–≥–Њ–≤ —Б–Њ–±—Л—В–Є–є –і–ї—П –Ј–∞–њ—Г—Б–Ї–∞ –Є –Њ—Б—В–∞–љ–Њ–≤–∞ –і–≤–Є–≥–∞—В–µ–ї—П –Љ–∞—И–Є–љ—Л. –°–Є–≥–љ–∞–ї –љ–∞ –Ј–∞–њ—Г—Б–Ї –±—Г–і–µ—В —Б—Д–Њ—А–Љ–Є—А–Њ–≤–∞–љ –µ—Б–ї–Є –≤—Л–њ–Њ–ї–љ—П—О—В—Б—П –≤—Б–µ —Б–ї–µ–і—Г—О—Й–Є–µ —Г—Б–ї–Њ–≤–Є—П: –і–≤–Є–≥–∞—В–µ–ї—М –µ—Й—С –љ–µ –Ј–∞–њ—Г—Й–µ–љ, –µ–≥–Њ —В–µ–Љ–њ–µ—А–∞—В—Г—А–∞ –Љ–µ–љ–µ–µ 200°–°, —В–Њ–њ–ї–Є–≤–∞ –≤ –±–∞–Ї–µ –љ–µ –Љ–µ–љ–µ–µ 1% –µ–≥–Њ –Њ–±—К—С–Љ–∞, –Є –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—М –њ–Њ–≤–µ—А–љ—Г–ї –Ї–ї—О—З –Ј–∞–ґ–Є–≥–∞–љ–Є—П. –Р–љ–∞–ї–Њ–≥–Є—З–љ–Њ, —Д–Њ—А–Љ–Є—А–Њ–≤–∞–љ–Є–µ —Б–Є–≥–љ–∞–ї–∞ –Њ—Б—В–∞–љ–Њ–≤–∞ –і–≤–Є–≥–∞—В–µ–ї—П –±—Г–і–µ—В –њ—А–Њ–Є–Ј–≤–µ–і–µ–љ–Њ –њ–Њ –≤—Л–њ–Њ–ї–љ–µ–љ–Є–Є –Ї–∞–Ї –Љ–Є–Љ–Є–љ—Г–Љ –Њ–і–љ–Њ–≥–Њ –Є–Ј —Б–ї–µ–і—Г—О—Й–Є—Е —Г—Б–ї–Њ–≤–Є–є: —З–∞—Б—В–Њ—В–∞ –≤—А–∞—Й–µ–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї—П –±–Њ–ї–µ–µ 3000 –Њ–±/–Љ–Є–љ, –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—М –≤—Л–љ—Г–ї –Ї–ї—О—З –Ј–∞–ґ–Є–≥–∞–љ–Є—П, –Є–ї–Є –Є–Љ–µ–µ—В—Б—П —Б–Є–љ–∞–ї –Њ—Б—В–∞–љ–Њ–≤–∞ –Њ—В –і—А—Г–≥–Є—Е –і–∞—В—З–Є–Ї–Њ–≤ (Abort). –Ь–µ—Е–∞–љ–Є–Ј–Љ —Д–ї–∞–≥–Њ–≤ —Б–Њ–±—Л—В–Є–є –±—Л–ї –≤–≤–µ–і—С–љ –≤ Micriµm OS –≤ –Њ—В–≤–µ—В –љ–∞ –њ–Њ—В—А–µ–±–љ–Њ—Б—В–Є —А–µ–∞–ї–Є–Ј–∞—Ж–Є–Є —Б—В–µ–Ї–∞ µC/TCP-IP. –Я—А–Њ–і–µ–Љ–Њ–љ—Б—В—А–Є—А—Г–µ–Љ —А–∞–±–Њ—В—Г —Б —Д–ї–∞–≥–∞–Љ–Є –љ–∞ –њ—А–Є–Љ–µ—А–µ –њ—А–Њ–µ–Ї—В–∞ RTOS_flags. –Т –њ—А–Њ–µ–Ї—В–µ –Є–Љ–µ–µ—В—Б—П 2 –њ–Њ—В–Њ–Ї–∞ –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—П, –Њ–і–Є–љ –Є–Ј –Ї–Њ—В–Њ—А—Л—Е –Љ–Њ–љ–Є—В–Њ—А–Є—В —Б–Њ—Б—В–Њ—П–љ–Є–µ –Њ–±–Њ–Є—Е –Ї–љ–Њ–њ–Њ–Ї –љ–∞ –і–µ–Љ–Њ-–њ–ї–∞—В–µ, –∞ –і—А—Г–≥–Њ–є —Г–њ—А–∞–≤–ї—П–µ—В —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–Љ. –Я–Њ—Б–ї–µ–і–љ–Є–є –і–Њ–ї–ґ–µ–љ –Є–Ј–Љ–µ–љ—П—В—М —Б–≤–Њ—С —Б–Њ—Б—В–Њ—П–љ–Є–µ –≤ –Љ–Њ–Љ–µ–љ—В –љ–∞–ґ–∞—В–Є—П –љ–∞ –Њ–і–љ—Г –Є–Ј –Ї–љ–Њ–њ–Њ–Ї –Є —В–Њ–ї—М–Ї–Њ –µ—Б–ї–Є –њ—А–Є —Н—В–Њ–Љ –і—А—Г–≥–∞—П –Ї–љ–Њ–њ–Ї–∞ —В–∞–Ї–ґ–µ –љ–∞–ґ–∞—В–∞. –°–Њ–Ј–і–∞–љ–Є–µ —Б—В—А—Г–Ї—В—Г—А—Л —Д–ї–∞–≥–Њ–≤ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П API —Д—Г–љ–Ї—Ж–Є–µ–є OSFlagCreate() –≤ —Б—В—А–Њ–Ї–µ 145, –≥–і–µ MyFlags – –≥–ї–Њ–±–∞–ї—М–љ–∞—П –њ–µ—А–µ–Љ–µ–љ–љ–∞—П —В–Є–њ–∞ OS_FLAG_GRP, –Њ–њ—А–µ–і–µ–ї—С–љ–љ–∞—П –≤ –љ–∞—З–∞–ї–µ —Д–∞–є–ї–∞ main.c, –Є –Є–љ–Є—Ж–Є–∞–ї–Є–Ј–Є—А–Њ–≤–∞–љ–љ–∞—П (=0) —В—А–µ—В—М–Є–Љ –њ–∞—А–∞–Љ–µ—В—А–Њ–Љ —Д—Г–љ–Ї—Ж–Є–Є. –Я–Њ—В–Њ–Ї –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ –Ї–љ–Њ–њ–Њ–Ї, –≤—Л–Ј—Л–≤–∞–µ–Љ—Л–є –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–Њ–Љ –Ї–∞–ґ–і—Л–µ 100–Љ—Б, –Њ–њ—А–µ–і–µ–ї—П–µ—В –Љ–Њ–Љ–µ–љ—В—Л –љ–∞–ґ–∞—В–Є—П –Є –Њ—В–њ—Г—Б–Ї–∞–љ–Є—П –Ї–љ–Њ–њ–Њ–Ї. –Э–Є–ґ–µ –њ–Њ–Ї–∞–Ј–∞–љ –Ї–Њ–і –Њ–±—А–∞–±–Њ—В–Ї–Є –Њ–і–љ–Њ–є –Є–Ј –Ї–љ–Њ–њ–Њ–Ї, –і–ї—П –і—А—Г–≥–Њ–є –≤—Б—С –∞–љ–∞–ї–Њ–≥–Є—З–љ–Њ. –Я—А–Є –љ–∞–ґ–∞—В–Є–Є –Ї–љ–Њ–њ–Ї–Є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П —Г—Б—В–∞–љ–Њ–≤–Ї–∞ –±–Є—В–∞ —Б –љ–Њ–Љ–µ—А–Њ–Љ 0 –≤ —Д–ї–∞–≥–Њ–≤–Њ–є —Б—В—А—Г–Ї—В—Г—А–µ (—Б—В—А–Њ–Ї–∞ 157), –∞ –њ—А–Є –Њ—В–њ—Г—Б–Ї–∞–љ–Є–Є – —Б–±—А–Њ—Б —Н—В–Њ–≥–Њ –±–Є—В–∞/—Д–ї–∞–≥–∞ (—Б—В—А–Њ–Ї–∞ 165). –Ф–ї—П –і—А—Г–≥–Њ–є –Ї–љ–Њ–њ–Ї–Є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П —Г—Б—В–∞–љ–Њ–≤–Ї–∞/—Б–±—А–Њ—Б –±–Є—В–∞ —Б –љ–Њ–Љ–µ—А–Њ–Љ 1. –Ъ–Њ–і –њ–Њ—В–Њ–Ї–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–Љ –њ–Њ–Ї–∞–Ј–∞–љ –љ–Є–ґ–µ. –Т —Б—В—А–Њ–Ї–µ 199 –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –њ—А–Њ–≤–µ—А–Ї–∞ —Г—Б—В–∞–љ–Њ–≤–Ї–Є –Њ–±–Њ–Є—Е —Д–ї–∞–≥–Њ–≤. –Х—Б–ї–Є —Д–ї–∞–≥–Є –љ–∞–ґ–∞—В–Є—П –Њ–±–Њ–Є—Е –Ї–љ–Њ–њ–Њ–Ї –љ–µ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ—Л, –њ–Њ—В–Њ–Ї –њ–µ—А–µ–≤–Њ–і–Є—В—Б—П –≤ –љ–µ–∞–Ї—В–Є–≤–љ–Њ–µ —Б–Њ—Б—В–Њ—П–љ–Є–µ (Pending). –Т–Њ–Ј–≤—А–∞—В –Є–Ј —Н—В–Њ–≥–Њ —Б–Њ—Б—В–Њ—П–љ–Є—П –њ—А–Њ–Є–Ј–≤–µ–і—С—В—Б—П –Ю–° –Ї–∞–Ї —В–Њ–ї—М–Ї–Њ –Њ–±–µ –Ї–љ–Њ–њ–Ї–Є –Њ–Ї–∞–ґ—Г—В—Б—П –љ–∞–ґ–∞—В—Л–Љ–Є. –Я—А–Є —Н—В–Њ–Љ RTOS –њ–µ—А–µ–≤–µ–і—С—В –њ–Њ—В–Њ–Ї –≤ —Б–Њ—Б—В–Њ—П–љ–Є–µ Ready –Є –≤—Б–Ї–Њ—А–µ –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї –њ—А–Њ–і–Њ–ї–ґ–Є—В –µ–≥–Њ —А–∞–±–Њ—В—Г —Б–Њ —Б—В—А–Њ–Ї–Є 200. –Т —Н—В–Њ–є —Б—В—А–Њ–Ї–µ –Љ—Л —Б–±—А–∞—Б—Л–≤–∞–µ–Љ –Њ–±–∞ —Д–ї–∞–≥–∞ –Ї–љ–Њ–њ–Њ–Ї –Є —В–µ–Љ —Б–∞–Љ—Л–Љ –≥–Њ—В–Њ–≤–Є–Љ—Б—П –Ї —Б–ї–µ–і—Г—О—Й–µ–Љ—Г –Є—Е –љ–∞–ґ–∞—В–Є—О. –Ю—В–Љ–µ—В–Є–Љ, —З—В–Њ —Г—Б—В–∞–љ–Њ–≤–Ї–∞ —Д–ї–∞–≥–Њ–≤ –Є –Є—Е —Б–±—А–Њ—Б –њ—А–Њ–Є–Ј–≤–Њ–і—П—В—Б—П –Њ–і–љ–Њ–є –Є —В–Њ–є-–ґ–µ API —Д—Г–љ–Ї—Ж–Є–µ–є OSFlagPost(), –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –µ—С —В—А–µ—В—М–µ–≥–Њ –њ–∞—А–∞–Љ–µ—В—А–∞. –Т—В–Њ—А–Њ–є –њ–∞—А–∞–Љ–µ—В—А –Ј–∞–і–∞—С—В –Љ–∞—Б–Ї—Г –Є–Ј–Љ–µ–љ–µ–љ–Є—П —Д–ї–∞–≥–Њ–≤. –Т –љ–∞—И–µ–Љ —Б–ї—Г—З–∞–µ –Ј–љ–∞—З–µ–љ–Є–µ 3 —Н—В–Њ–≥–Њ –њ–∞—А–∞–Љ–µ—В—А–∞ –Њ–Ј–љ–∞—З–∞–µ—В –Њ–њ–µ—А–∞—Ж–Є—О –љ–∞–і –±–Є—В–∞–Љ–Є 0 –Є 1, —В.–µ. –љ–∞–і –Њ–±–Њ–Є–Љ–Є —Д–ї–∞–≥–∞–Љ–Є. –Ь–Њ–ґ–љ–Њ –њ—А–Њ–≤–µ—А–Є—В—М –Є —Б–±—А–Њ—Б–Є—В—М —Д–ї–∞–≥–Є —Б–Њ–±—Л—В–Є–є –≤—Л–Ј–Њ–≤–Њ–Љ –ї–Є—И—М –Њ–і–љ–Њ–є API —Д—Г–љ–Ї—Ж–Є–Є OSFlagPend() –≤ —Б—В—А–Њ–Ї–µ 201 –≤–Љ–µ—Б—В–Њ —Б—В—А–Њ–Ї 199 –Є 200. –†–∞–±–Њ—В–∞ —Б –Љ—М—О—В–µ–Ї—Б–∞–Љ–Є (mutex) –Ь—М—О—В–µ–Ї—Б—Л, –Ї–∞–Ї –Є–Ј–≤–µ—Б—В–љ–Њ, –Є—Б–њ–Њ–ї—М–Ј—Г—О—В—Б—П –і–ї—П –Њ—А–≥–∞–љ–Є–Ј–∞—Ж–Є–Є –Ї—А–Є—В–Є—З–µ—Б–Ї–Є—Е —Б–µ–Ї—Ж–Є–є –Ї–Њ–і–∞, –≤ –Ї–Њ—В–Њ—А—Л—Е –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –і–Њ—Б—В—Г–њ –Ї –Њ–±—Й–µ–Љ—Г —А–µ—Б—Г—А—Б—Г, –Ї–Њ—В–Њ—А—Л–є –љ–µ –і–Њ–ї–ґ–µ–љ –±—Л—В—М –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ –±–Њ–ї–µ–µ —З–µ–Љ –Њ–і–љ–Є–Љ –њ–Њ—В–Њ–Ї–Њ–Љ. –≠—В–Њ –Љ–Њ–ґ–љ–Њ —А–µ–∞–ї–Є–Ј–Њ–≤–∞—В—М –љ–µ—Б–Ї–Њ–ї—М–Ї–Є–Љ–Є —Б–њ–Њ—Б–Њ–±–∞–Љ–Є, –Ї–∞–ґ–і—Л–є –Є–Ј –Ї–Њ—В–Њ—А—Л—Е –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В—Б—П Micriµm OS. –Я—А–µ–ґ–і–µ –≤—Б–µ–≥–Њ, –Љ–Њ–ґ–љ–Њ –Ј–∞–њ—А–µ—В–Є—В—М –њ—А–µ—А—Л–≤–∞–љ–Є—П –њ—А–Є –≤—Е–Њ–і–µ –њ–Њ—В–Њ–Ї–∞ –≤ –Ї—А–Є—В–Є—З–µ—Б–Ї—Г—О —Б–µ–Ї—Ж–Є—О –Ї–Њ–і–∞ –Є —А–∞–Ј—А–µ—И–Є—В—М –Є—Е –њ–Њ –≤—Л—Е–Њ–і—Г –Є–Ј –љ–µ—С. –Ш–љ–∞—З–µ, –Љ–Њ–ґ–љ–Њ –Ј–∞–њ—А–µ—В–Є—В—М —А–∞–±–Њ—В—Г –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–∞ –љ–∞ –≤—А–µ–Љ—П –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –њ–Њ—В–Њ–Ї–Њ–Љ –Ї—А–Є—В–Є—З–µ—Б–Ї–Њ–є —Б–µ–Ї—Ж–Є–Є. –Т —В—А–µ—В—М–µ–Љ –≤–∞—А–Є–∞–љ—В–µ –Љ–Њ–ґ–љ–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М —Б–µ–Љ–∞—Д–Њ—А—Л, –Њ–і–љ–∞–Ї–Њ, —Н—В–Њ—В —Б–њ–Њ—Б–Њ–± –њ–Њ–і–≤–µ—А–ґ–µ–љ –њ—А–Њ–±–ї–µ–Љ–µ –Є–љ–≤–µ—А—Б–Є–Є –њ—А–Є–Њ—А–Є—В–µ—В–∞ –њ–Њ—В–Њ–Ї–Њ–≤. –Э–µ–і–Њ—Б—В–∞—В–Ї–Є –Є –Ї–∞–ґ–і–Њ–≥–Њ –Є–Ј –≤—Л—И–µ–њ—А–Є–≤–µ–і—С–љ–љ—Л—Е —Б–њ–Њ—Б–Њ–±–Њ–≤ –Ј–∞—Й–Є—В—Л —В–∞–Ї–ґ–µ —Е–Њ—А–Њ—И–Њ –Є–Ј–≤–µ—Б—В–љ—Л –Є –Њ–њ–Є—Б–∞–љ—Л –≤ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–µ–є –ї–Є—В–µ—А–∞—В—Г—А–µ –њ–Њ –Њ–њ–µ—А–∞—Ж–Є–Њ–љ–љ—Л–Љ —Б–Є—Б—В–µ–Љ–∞–Љ, –≤ —В–Њ–Љ —З–Є—Б–ї–µ –Є —Г—З–µ–±–љ–Њ–є. –Т –љ–∞—И–µ–Љ –і–µ–Љ–Њ–љ—Б—В—А–∞—Ж–Є–Њ–љ–љ–Њ–Љ –њ—А–Њ–µ–Ї—В–µ RTOS_mutex –Љ—Л –Ј–∞–і–µ–є—Б—В–≤—Г–µ–Љ —Б–њ–µ—Ж–Є–∞–ї—М–љ—Л–є –Њ–±—К–µ–Ї—В –Ю–° mutex. –Ю–±—Й–Є–Љ —А–µ—Б—Г—А—Б–Њ–Љ –і–ї—П –њ–Њ—В–Њ–Ї–Њ–≤ —Г –љ–∞—Б –±—Г–і–µ—В –≥–ї–Њ–±–∞–ї—М–љ–∞—П –њ–µ—А–µ–Љ–µ–љ–љ–∞—П MyVar, –Ј–љ–∞—З–µ–љ–Є–µ –Ї–Њ—В–Њ—А–Њ–є –±—Г–і–µ—В —Г–≤–µ–ї–Є—З–Є–≤–∞—В—М—Б—П –љ–∞ 1 –Њ–і–љ–Є–Љ –њ–Њ—В–Њ–Ї–Њ–Љ –Є —Г–≤–µ–ї–Є—З–Є–≤–∞—В—М—Б—П –љ–∞ 5 –і—А—Г–≥–Є–Љ. –•–Њ—В—П —Г–≤–µ–ї–Є—З–µ–љ–Є–µ –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є –Ї–Њ–і–Є—А—Г–µ—В—Б—П –Њ–і–љ–Њ–є —Б—В—А–Њ—З–Ї–Њ–є –Ї–Њ–і–∞ –љ–∞ –ѓ–Т–£, –і–ї—П —А–µ–∞–ї–Є–Ј–∞—Ж–Є–Є —Н—В–Њ–≥–Њ —Г—З–∞—Б—В–Ї–∞ –љ–∞ –Ь–Ъ –Љ–Њ–ґ–µ—В –њ–Њ—В—А–µ–±–Њ–≤–∞—В—М—Б—П –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –Љ–∞—И–Є–љ–љ—Л—Е –Ї–Њ–Љ–∞–љ–і. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –±–µ–Ј –њ—А–Є–љ—П—В–Є—П –Љ–µ—А —Б–Є–љ—Е—А–Њ–љ–Є–Ј–∞—Ж–Є–Є –≤ –Љ–љ–Њ–≥–Њ–њ–Њ—В–Њ—З–љ–Њ–є —Б–Є—Б—В–µ–Љ–µ –Љ–Њ–ґ–µ—В –≤–Њ–Ј–љ–Є–Ї–љ—Г—В—М —Б–Њ—Б—В–Њ—П–љ–Є–µ –≥–Њ–љ–Ї–Є, –њ—А–Є –Ї–Њ—В–Њ—А–Њ–Љ —А–∞–±–Њ—В–∞ —Б–Є—Б—В–µ–Љ—Л –Є–ї–Є –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П –Ј–∞–≤–Є—Б–Є—В –Њ—В —В–Њ–≥–Њ, –≤ –Ї–∞–Ї–Њ–Љ –њ–Њ—А—П–і–Ї–µ –≤—Л–њ–Њ–ї–љ—П—О—В—Б—П —З–∞—Б—В–Є –Ї–Њ–і–∞. –Ф–ї—П –Ј–∞—Й–Є—В—Л —А–µ—Б—Г—А—Б–∞ —Б–Њ–Ј–і–∞–і–Є–Љ –≥–ї–Њ–±–∞–ї—М–љ—Л–є –Њ–±—К–µ–Ї—В mutex, –≥–і–µ MyMutex – –њ–µ—А–µ–Љ–µ–љ–љ–∞—П —В–Є–њ–∞ OS_MUTEX, –Њ–њ—А–µ–і–µ–ї—С–љ–љ–∞—П –≤ —Б—В—А–Њ–Ї–µ 33 —Д–∞–є–ї–∞ main.c. –Ґ–µ–њ–µ—А—М —Г—З–∞—Б—В–Ї–Є –Ї–Њ–і–∞, –≥–і–µ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –Є–Ј–Љ–µ–љ–µ–љ–Є–µ –Ј–љ–∞—З–µ–љ–Є—П –Ј–∞—Й–Є—Й–∞–µ–Љ–Њ–≥–Њ —А–µ—Б—Г—А—Б–∞ —Б–ї–µ–і—Г–µ—В –Њ–Ї—А—Г–ґ–Є—В—М –≤—Л–Ј–Њ–≤–∞–Љ–Є API —Д—Г–љ–Ї—Ж–Є–є OSMutexPend() –Є OSMutexPost(), –Ї–∞–Ї —Н—В–Њ –њ–Њ–Ї–∞–Ј–∞–љ–Њ –і–ї—П –њ–µ—А–≤–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞, —Г–≤–µ–ї–Є—З–Є–≤–∞—О—Й–µ–≥–Њ –њ–µ—А–µ–Љ–µ–љ–љ—Г—О –љ–∞ 1 –њ–Њ –љ–∞–ґ–∞—В–Є—О –Ї–љ–Њ–њ–Ї–Є... ... –Є –≤—В–Њ—А–Њ–≥–Њ, —Г–≤–µ–ї–Є—З–Є–≤–∞—О—Й–µ–≥–Њ –њ–µ—А–µ–Љ–µ–љ–љ—Г—О –љ–∞ 5 –Ї–∞–ґ–і—Г—О —Б–µ–Ї—Г–љ–і—Г –њ–Њ —В–∞–є–Љ–µ—А—Г, –Ї–Њ–і –Ї–Њ—В–Њ—А–Њ–≥–Њ –њ—А–Є–≤–µ–і—С–љ –њ–Њ–ї–љ–Њ—Б—В—М—О: –†–∞–±–Њ—В—Г –њ—А–Є–ї–Њ–ґ–µ–љ–Є—П –Љ–Њ–ґ–љ–Њ –≤–Є–Ј—Г–∞–ї–Є–Ј–Є—А–Њ–≤–∞—В—М —Б –њ–Њ–Љ–Њ—Й—М—О –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞ µC/Probe. –Ч–љ–∞—З–µ–љ–Є–µ –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є MyVar –Њ—В–Њ–±—А–∞–ґ–∞–µ—В—Б—П –≤ —А–µ–∞–ї—М–љ–Њ–Љ –≤—А–µ–Љ–µ–љ–Є –љ–∞ —И–Ї–∞–ї–µ –њ–Њ –њ—А–Њ—И–µ—Б—В–≤–Є–Є –Ї–∞–ґ–і–Њ–є —Б–µ–Ї—Г–љ–і—Л –Є/–Є–ї–Є –љ–∞–ґ–∞—В–Є–Є –Ї–љ–Њ–њ–Ї–Є –љ–∞ –і–µ–Љ–Њ-–њ–ї–∞—В–µ. –†–∞–±–Њ—В–∞ —Б –Њ—З–µ—А–µ–і—М—О —Б–Њ–Њ–±—Й–µ–љ–Є–є Micriµm OS –њ—А–µ–і–Њ—Б—В–∞–≤–ї—П–µ—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –Њ—А–≥–∞–љ–Є–Ј–∞—Ж–Є–Є –Њ—З–µ—А–µ–і–µ–є —Б–Њ–Њ–±—Й–µ–љ–Є–є (–њ–Њ—З—В–Њ–≤—Л—Е —П—Й–Є–Ї–Њ–≤) –і–ї—П –Њ–±–Љ–µ–љ–∞ –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–µ–є –Љ–µ–ґ–і—Г –њ–Њ—В–Њ–Ї–∞–Љ–Є. –Ф–ї—П —Н—В–Њ–≥–Њ, –Ї–∞–Ї –Є –≤ —Б–ї—Г—З–∞–µ —Б —Б–µ–Љ–∞—Д–Њ—А–∞–Љ–Є, –Є–Љ–µ–µ—В—Б—П –і–≤–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є: –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –≤—Б—В—А–Њ–µ–љ–љ—Л–є –≤ –Ї–∞–ґ–і—Л–є –њ—А–Њ—Ж–µ—Б—Б —П—Й–Є–Ї/–Њ—З–µ—А–µ–і—М, –Є–ї–Є –Њ—А–≥–∞–љ–Є–Ј–Њ–≤–∞—В—М –≤–љ–µ—И–љ–Є–є. –Т –њ–µ—А–≤–Њ–Љ —Б–ї—Г—З–∞–µ —В–Њ–ї—М–Ї–Њ –њ–Њ—В–Њ–Ї-—Е–Њ–Ј—П–Є–љ –њ–Њ—З—В–Њ–≤–Њ–≥–Њ —П—Й–Є–Ї–∞ –Љ–Њ–ґ–µ—В –њ—А–Є–љ–Є–Љ–∞—В—М –Є–Ј –љ–µ–≥–Њ —Б–Њ–Њ–±—Й–µ–љ–Є—П, –≤ —В–Њ –≤—А–µ–Љ—П –Ї–∞–Ї –Њ—В—Б—Л–ї–Ї–∞ —Б–Њ–Њ–±—Й–µ–љ–Є–є –≤ —Н—В–Њ—В —П—Й–Є–Ї –±—Г–і–µ—В –і–Њ—Б—В—Г–њ–љ–∞ –ї—О–±–Њ–Љ—Г –і—А—Г–≥–Њ–Љ—Г –њ–Њ—В–Њ–Ї—Г. –≠—В–Є–Љ –і–Њ—Б—В–Є–≥–∞–µ—В—Б—П –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –Љ–µ–љ—М—И–∞—П –Є–Ј–±—Л—В–Њ—З–љ–Њ—Б—В—М –Ї–Њ–і–∞ –њ–Њ —Б—А–∞–≤–љ–µ–љ–Є—О —Б –і—А—Г–≥–Є–Љ —Б–њ–Њ—Б–Њ–±–Њ–Љ, –њ—А–Є –Ї–Њ—В–Њ—А–Њ–Љ –ї—О–±–Њ–є –њ–Њ—В–Њ–Ї –Љ–Њ–ґ–µ—В –Њ—В—Б—Л–ї–∞—В—М –Є –њ—А–Є–љ–Є–Љ–∞—В—М —Б–Њ–Њ–±—Й–µ–љ–Є—П –Є–Ј –≤–љ–µ—И–љ–µ–≥–Њ —П—Й–Є–Ї–∞/–Њ—З–µ—А–µ–і–Є. –Т –љ–∞—И–µ–Љ –і–µ–Љ–Њ-–њ—А–Њ–µ–Ї—В–µ RTOS_queue –Њ–±–Љ–µ–љ —Б–Њ–Њ–±—Й–µ–љ–Є—П–Љ–Є –±—Г–і–µ—В –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—М—Б—П –Љ–µ–ґ–і—Г –і–≤—Г–Љ—П –њ–Њ—В–Њ–Ї–∞–Љ–Є. –Я–µ—А–≤—Л–є –њ–Њ—В–Њ–Ї –Љ–Њ–љ–Є—В–Њ—А–Є—В —Б–Њ—Б—В–Њ—П–љ–Є–µ –і–≤—Г—Е –Ї–љ–Њ–њ–Њ–Ї –љ–∞ –і–µ–Љ–Њ-–њ–ї–∞—В–µ –Є –њ–Њ –љ–∞–ґ–∞—В–Є—О –Ї–∞–ґ–і–Њ–є –Є–Ј –љ–Є—Е –њ–Њ—Б—Л–ї–∞–µ—В —Б–Њ–Њ–±—Й–µ–љ–Є–µ –і—А—Г–≥–Њ–Љ—Г –њ–Њ—В–Њ–Ї—Г —Б –љ–Њ–Љ–µ—А–Њ–Љ –љ–∞–ґ–∞—В–Њ–є –Ї–љ–Њ–њ–Ї–Є. –Ф—А—Г–≥–Њ–є –њ–Њ—В–Њ–Ї –њ–Њ –њ–Њ–ї—Г—З–µ–љ–Є–Є —Б–Њ–Њ–±—Й–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–µ—В –Ї—А–∞—Б–љ—Л–є –Є–ї–Є –Ј–µ–ї—С–љ—Л–є —Б–≤–µ—В–Њ–і–Є–Њ–і –љ–∞ –њ–ї–∞—В–µ, –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –љ–Њ–Љ–µ—А–∞ –Ї–љ–Њ–њ–Ї–Є –≤ —Б–Њ–Њ–±—Й–µ–љ–Є–Є. –†–µ–∞–ї–Є–Ј–∞—Ж–Є—П –њ–Њ—З—В–Њ–≤–Њ–≥–Њ —П—Й–Є–Ї–∞ –њ–µ—А–≤—Л–Љ —Б–њ–Њ—Б–Њ–±–Њ–Љ –і–ї—П –њ–Њ—В–Њ–Ї–∞ –Ї–љ–Њ–њ–Њ–Ї –њ–Њ–Ї–∞–Ј–∞–љ–∞ –љ–Є–ґ–µ. –°–Њ–Њ–±—Й–µ–љ–Є—П –Њ—В–њ—А–∞–≤–ї—П—О—В—Б—П –≤ —Б—В—А–Њ–Ї–∞—Е 155 –Є 168, –≥–і–µ —В—А–µ—В–Є–є –њ–∞—А–∞–Љ–µ—В—А –≤ API – —Н—В–Њ –і–ї–Є–љ–∞ —Б–Њ–Њ–±—Й–µ–љ–Є—П –≤ –±–∞–є—В–∞—Е, –∞ —З–µ—В–≤—С—А—В—Л–є –Њ–њ—А–µ–і–µ–ї—П–µ—В –Ї—Г–і–∞ –њ–Њ–Љ–µ—Б—В–Є—В—М –љ–Њ–≤–Њ–µ —Б–Њ–Њ–±—Й–µ–љ–Є–µ – –≤ –Ї–Њ–љ–µ—Ж –Є–ї–Є –љ–∞—З–∞–ї–Њ –Њ—З–µ—А–µ–і–Є. –°–Њ–Њ—В–≤–µ—В—Б—В–≤–µ–љ–љ–Њ, –≤ –Ї–Њ–і–µ –і—А—Г–≥o–≥–Њ –њ–Њ—В–Њ–Ї–∞ –≤—Л–µ–Љ–Ї–∞ —Б–Њ–Њ–±—Й–µ–љ–Є—П –Є–Ј –Њ—З–µ—А–µ–і–Є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П API —Д—Г–љ–Ї—Ж–Є–µ–є OSTaskQPend(). –Я–µ—А–≤—Л–є –њ–∞—А–∞–Љ–µ—В—А –Ј–∞–і–∞—С—В –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–µ –≤—А–µ–Љ—П –Њ–ґ–Є–і–∞–љ–Є—П —Б–Њ–Њ–±—Й–µ–љ–Є—П –≤ —В–Є–Ї–∞—Е –Ю–° (–µ—Б–ї–Є 0, —В–Њ –ґ–і–∞—В—М –љ–µ–Њ–≥—А–∞—З–Є—З–µ–љ–љ–Њ). –Т—В–Њ—А–Њ–є – –Њ–њ—А–µ–і–µ–ї—П–µ—В —З—В–Њ –і–µ–ї–∞—В—М –µ—Б–ї–Є —П—Й–Є–Ї –њ—Г—Б—В. –Т –љ–∞—И–µ–Љ —Б–ї—Г—З–∞–µ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—Б—П –±–ї–Њ–Ї–Є—А–Њ–≤–Ї–∞/–њ–µ—А–µ–≤–Њ–і –њ—А–Њ—Ж–µ—Б—Б–∞ –≤ –љ–µ–∞–Ї—В–Є–≤–љ–Њ–µ —Б–Њ—Б—В–Њ—П–љ–Є–µ (Pending). –Ґ—А–µ—В–Є–є –њ–∞—А–∞–Љ–µ—В—А – —Н—В–Њ —Г–Ї–∞–Ј–∞—В–µ–ї—М –љ–∞ –њ–µ—А–µ–Љ–µ–љ–љ—Г—О, –Ї—Г–і–∞ –±—Г–і–µ—В –Ј–∞–њ–Є—Б–∞–љ–∞ –і–ї–Є–љ–∞ —Б–Њ–Њ–±—Й–µ–љ–Є—П, –Є —З–µ—В–≤—С—А—В—Л–є – —Г–Ї–∞–Ј–∞—В–µ–ї—М –љ–∞ –њ–µ—А–µ–Љ–µ–љ–љ—Г—О, –Ї—Г–і–∞ –±—Г–і–µ—В –Ј–∞–њ–Є—Б–∞–љ–∞ –Њ—В–Љ–µ—В–Ї–∞ –≤—А–µ–Љ–µ–љ–Є –њ–Њ–ї—Г—З–µ–љ–Є—П —Б–Њ–Њ–±—Й–µ–љ–Є—П (0 –µ—Б–ї–Є –Ј–∞–њ–Є—Б—М –љ–µ –љ—Г–ґ–љ–∞). –Т–Њ–Ј–≤—А–∞—Й–∞–µ–Љ–Њ–µ –Ј–љ–∞—З–µ–љ–Є–µ API –Є–Љ–µ–µ—В —В–Є–њ void*. –Ґ–∞–Ї–ґ–µ, –Ї–∞–Ї –Є –і–ї—П –і—А—Г–≥–Є—Е –њ—А–Є–Љ–Є—В–Є–≤–Њ–≤ –Ю–°, –Є–Љ–µ—О—В—Б—П –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ —Д—Г–љ–Ї—Ж–Є–Є —А–∞–±–Њ—В—Л —Б –Њ—З–µ—А–µ–і—М—О, —Б–Љ. –і–µ—В–∞–ї–Є –≤ –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є–Є [2]. –Ф–ї—П —А–µ–∞–ї–Є–Ј–∞—Ж–Є–Є –≤—В–Њ—А–Њ–≥–Њ —Б–њ–Њ—Б–Њ–±–∞ –њ–µ—А–µ–і–∞—З–Є —Б–Њ–Њ–±—Й–µ–љ–Є–є —Б–ї–µ–і—Г–µ—В —А–∞—Б–Ї–Њ–Љ–Љ–µ–љ—В–Є—А–Њ–≤–∞—В—М —Б—В—А–Њ–Ї—Г 146 –Ї–Њ–і–∞ –њ–µ—А–≤–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞, –Ї–Њ—В–Њ—А–∞—П –Њ—А–≥–∞–љ–Є–Ј—Г–µ—В –≤–љ–µ—И–љ–Є–є –њ–Њ—З—В–Њ–≤—Л–є —П—Й–Є–Ї –љ–∞ 20 —Б–Њ–Њ–±—Й–µ–љ–Є–є. –Ф–∞–ї–µ–µ, —Б–ї–µ–і—Г–µ—В —А–∞—Б–Ї–Њ–Љ–Љ–µ–љ—В–Є—А–Њ–≤–∞—В—М —Б—В—А–Њ–Ї–Є –Ї–Њ–і–∞ 154, 167, 187 –Є –Ј–∞–Ї–Њ–Љ–Љ–µ–љ—В–Є—А–Њ–≤–∞—В—М —Б—В—А–Њ–Ї–Є 155, 168, –Є 188. –†–∞–±–Њ—В–∞ —Б –њ—А–µ—А—Л–≤–∞–љ–Є—П–Љ–Є –Я—А–∞–Ї—В–Є—З–µ—Б–Ї–Є –Ї–∞–ґ–і—Л–є –њ—А–Њ–µ–Ї—В –љ–∞ –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞—Е –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В –∞–њ–њ–∞—А–∞—В–љ—Л–µ –њ—А–µ—А—Л–≤–∞–љ–Є—П, –≥–µ–љ–µ—А–Є—А—Г–µ–Љ—Л–µ –њ–µ—А–Є—Д–µ—А–Є–µ–є. Micriµm OS —А–∞–Ј–ї–Є—З–∞–µ—В –і–≤–∞ —В–Є–њ–∞ –њ—А–µ—А—Л–≤–∞–љ–Є–є: –Ъ–Р-ISR (Kernel Aware) –Є NKA-ISR (Non-Kernel Aware). –Э–µ—Б–Љ–Њ—В—А—П –љ–∞ —В–Њ, —З—В–Њ –Љ—Л –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ RTOS, —З–∞—Б—В–Њ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ —Б–Њ–Ј–і–∞—В—М –±—Л—Б—В—А—Г—О ISR, –Ї–Њ—В–Њ—А–Њ–є –љ–µ –љ—Г–ґ–љ–Њ –љ–µ–њ–Њ—Б—А–µ–і—Б—В–≤–µ–љ–љ–Њ –≤–Ј–∞–Є–Љ–Њ–і–µ–є—Б—В–≤–Њ–≤–∞—В—М —Б –Ю–° –Є –њ–Њ—В–Њ–Ї–∞–Љ–Є. –Э–∞–њ—А–Є–Љ–µ—А, –Ї–Њ–≥–і–∞ –њ—А–Њ—Б—В–Њ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Є–Ј–Љ–µ–љ–Є—В—М —Б–Ї–≤–∞–ґ–љ–Њ—Б—В—М –≥–µ–љ–µ—А–Є—А—Г–µ–Љ–Њ–є PWM, –Є–ї–Є –њ—А–Њ–Є–Ј–≤–µ—Б—В–Є —З—В–µ–љ–Є–µ –±–∞–є—В–∞ —Б –≤–љ–µ—И–љ–µ–≥–Њ –Є–љ—В–µ—А—Д–µ–є—Б–∞, –њ—А–Њ–≤–µ—А–Є—В—М –µ–≥–Њ, –Є —А–∞–Ј–Љ–µ—Б—В–Є—В—М –≤ RAM –і–ї—П –њ–Њ—Б–ї–µ–і—Г—О—Й–µ–є –Њ–±—А–∞–±–Њ—В–Ї–Є –њ–Њ—В–Њ–Ї–∞–Љ–Є. –Т –Ї–Њ–і–µ —В–∞–Ї–Њ–є NKA-ISR –љ–µ–ї—М–Ј—П –≤—Л–Ј—Л–≤–∞—В—М –љ–Є–Ї–∞–Ї–Є–µ —Д—Г–љ–Ї—Ж–Є–Є RTOS. –° –і—А—Г–≥–Њ–є —Б—В–Њ—А–Њ–љ—Л, KA-ISR –Ј–љ–∞–µ—В –Њ —Б—Г—Й–µ—Б—В–≤–Њ–≤–∞–љ–Є–Є RTOS –Є –Љ–Њ–ґ–µ—В –±—Л—В—М –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–∞ –і–ї—П –Є–љ—Д–Њ—А–Љ–Є—А–Њ–≤–∞–љ–Є—П –±–ї–Њ–Ї–Є—А–Њ–≤–∞–љ–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ –Њ –љ–∞—Б—В—Г–њ–ї–µ–љ–Є–Є –Њ–ґ–Є–і–∞–µ–Љ–Њ–≥–Њ –Є–Љ —Б–Њ–±—Л—В–Є—П, –љ–∞–њ—А–Є–Љ–µ—А —Б –њ–Њ–Љ–Њ—Й—М—О —Б–µ–Љ–∞—Д–Њ—А–∞. –Т –Њ–±–Њ–Є—Е —Б–ї—Г—З–∞—П—Е —А–µ–∞–ї–Є–Ј–∞—Ж–Є–Є ISR –≤—Л–њ–Њ–ї–љ–µ–љ–Є–µ —В–µ–Ї—Г—Й–µ–≥–Њ –њ–Њ—В–Њ–Ї–∞ –њ—А–µ—А—Л–≤–∞–µ—В—Б—П –љ–∞ –≤—А–µ–Љ—П –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –Ї–Њ–і–∞ ISR –Є –њ–Њ—В–Њ–Ї –њ–µ—А–µ—Е–Њ–і–Є—В –≤ —Б–Њ—Б—В–Њ—П–љ–Є–µ Interrupted (—Б–Љ. –≤—Л—И–µ). –Я—А–Є —Н—В–Њ–Љ –њ–Њ—Б–ї–µ NKA-ISR, –Ї–∞–Ї –њ—А–∞–≤–Є–ї–Њ, –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –њ—А–Њ–і–Њ–ї–ґ–µ–љ–Є–µ –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –њ—А–µ—А–≤–∞–љ–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞. –Ю–і–љ–∞–Ї–Њ –њ–Њ—Б–ї–µ –Ј–∞–≤–µ—А—И–µ–љ–Є—П —А–∞–±–Њ—В—Л KA-ISR –Њ–±—П–Ј–∞—В–µ–ї—М–љ–Њ –≤–Ї–ї—О—З–∞–µ—В—Б—П –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї –і–ї—П –≤—Л–±–Њ—А–∞ –њ–Њ—В–Њ–Ї–∞ —Б –љ–∞–Є–≤—Л—Б—И–Є–Љ –њ—А–Є–Њ—А–Є—В–µ—В–Њ–Љ, –Ї–Њ—В–Њ—А—Л–є, –љ–∞–њ—А–Є–Љ–µ—А, –≤ —Б–ї—Г—З–∞–µ —А–∞–Ј–±–ї–Њ–Ї–Є—А–Њ–≤–Ї–Є –µ–≥–Њ ISR –Љ–Њ–ґ–µ—В –±—Л—В—М –Њ—В–ї–Є—З–љ—Л–Љ –Њ—В –њ—А–µ—А–≤–∞–љ–љ–Њ–≥–Њ. –Я—А–Њ–і–µ–Љ–Њ–љ—Б—В—А–Є—А—Г–µ–Љ —Б–Њ–Ј–і–∞–љ–Є–µ –Њ–±–Њ–Є—Е —В–Є–њ–Њ–≤ ISR –љ–∞ –њ—А–Њ—Б—В—Л—Е –њ—А–Є–Љ–µ—А–∞—Е. –Т –Њ–±–Њ–Є—Е —Б–ї—Г—З–∞—П—Е –Љ—Л —Е–Њ—В–Є–Љ –Є–Ј–Љ–µ–љ–Є—В—М —Б–Њ—Б—В–Њ—П–љ–Є–µ —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –њ–Њ –љ–∞–ґ–∞—В–Є—О –Ї–љ–Њ–њ–Ї–Є –љ–∞ –і–µ–Љ–Њ-–њ–ї–∞—В–µ. –Ф–ї—П —Н—В–Њ–≥–Њ –Љ—Л –≤ –њ–Њ—В–Њ–Ї–µ StartTask –Ї–Њ–љ—Д–Є–≥—Г—А–Є—А—Г–µ–Љ –≤—Л–≤–Њ–і –Ь–Ъ, —Б–Њ–µ–і–Є–љ—С–љ–љ—Л–є —Б –Ї–љ–Њ–њ–Ї–Њ–є, –љ–∞ –≥–µ–љ–µ—А–∞—Ж–Є—О –њ—А–µ—А—Л–≤–∞–љ–Є—П –њ–Њ –њ–∞–і–∞—О—Й–µ–Љ—Г —Г—А–Њ–≤–љ—О —Б–Є–≥–љ–∞–ї–∞, —А–∞–Ј—А–µ—И–∞–µ–Љ –њ—А–µ—А—Л–≤–∞–љ–Є—П GPIO –і–ї—П NVIC ... ... –Є –≤ —Б–ї—Г—З–∞–µ NKA-ISR –њ–Є—И–µ–Љ –Њ–±—Л—З–љ—Л–є –Ї–Њ–і ISR, –Ї–∞–Ї –±—Г–і—В–Њ RTOS –љ–µ —Б—Г—Й–µ—Б—В–≤—Г–µ—В: –Я—А–Є —Н—В–Њ–Љ SystemView –љ–µ –њ–Њ–Ї–∞–Ј—Л–≤–∞–µ—В –љ–Є–Ї–∞–Ї–Є—Е –њ—А–Є–Ј–љ–∞–Ї–Њ–≤ —Б—Г—Й–µ—Б—В–≤–Њ–≤–∞–љ–Є—П –њ—А–µ—А—Л–≤–∞–љ–Є—П —Б —В–Њ—З–Ї–Є –Ј—А–µ–љ–Є—П RTOS. –°–Љ. –і–µ—В–∞–ї–Є –≤ –Є—Б—Е–Њ–і–љ–Њ–Љ —В–µ–Ї—Б—В–µ –њ—А–Њ–µ–Ї—В–∞ RTOS_NKA –≤ –њ—А–Є–ї–Њ–ґ–µ–љ–Є–Є. –Т —Б–ї—Г—З–∞–µ KA-ISR –Ї–Њ–љ—Д–Є–≥—Г—А–∞—Ж–Є—П –Ї–љ–Њ–њ–Ї–Є –≤ –њ–Њ—В–Њ–Ї–µ StartTask –Є–і–µ–љ—В–Є—З–љ–∞ –њ—А–µ–і—Л–і—Г—Й–µ–Љ—Г —Б–ї—Г—З–∞—О. –Т —Н—В–Њ—В –њ–Њ—В–Њ–Ї —В–∞–Ї–ґ–µ –і–Њ–±–∞–≤–ї–µ–љ –Ї–Њ–і —Б–Њ–Ј–і–∞–љ–Є—П –љ–Њ–≤–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–Љ –Є –µ–≥–Њ —Б–µ–Љ–∞—Д–Њ—А–∞, –Ї–Њ—В–Њ—А—Л–є –Љ—Л –±—Г–і–µ–Љ –Њ—В–Ї—А—Л–≤–∞—В—М –Є–Ј ISR. –Я—А–Є —Н—В–Њ–Љ –Є–Љ—П ISR –і–Њ–ї–ґ–љ–Њ –±—Л—В—М —В–∞–Ї–Є–Љ, –Ї–∞–Ї–Є–Љ –Њ–љ–Њ –њ—А–Њ–њ–Є—Б–∞–љ–Њ –≤ —В–∞–±–ї–Є—Ж–µ –≤–µ–Ї—В–Њ—А–Њ–≤ –њ—А–µ—А—Л–≤–∞–љ–Є–є. –Ю–і–љ–∞–Ї–Њ, —Б—В–∞–љ–і–∞—А—В–љ—Л–є –Ї–Њ–і —Б–±—А–Њ—Б–∞ —Д–ї–∞–≥–∞ –њ—А–µ—А—Л–≤–∞–љ–Є—П –Є –Њ—В–Ї—А—Л—В–Є—П —Б–µ–Љ–∞—Д–Њ—А–∞ –Њ–Ї—А—Г–ґ—С–љ –љ–µ—Б–Ї–Њ–ї—М–Ї–Є–Љ–Є –≤—Л–Ј–Њ–≤–∞–Љ–Є RTOS API. –°–ї–µ–і—Г–µ—В –њ—А–Є–і–µ—А–ґ–Є–≤–∞—В—М—Б—П —Н—В–Њ–≥–Њ —И–∞–±–ї–Њ–љ–∞ –Є –њ—А–Є —Б–Њ–Ј–і–∞–љ–Є–Є –і—А—Г–≥–Є—Е KA-ISR. –Ъ–Њ–і –њ–Њ—В–Њ–Ї–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–Љ –љ–Є—З–µ–Љ –љ–µ –њ—А–Є–Љ–µ—З–∞—В–µ–ї–µ–љ. –Ш–Ј–Љ–µ–љ–µ–љ–Є–µ —Б–Њ—Б—В–Њ—П–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–∞ –њ—А–Њ–Є–Ј–Њ–є–і—С—В –Ї–∞–Ї —В–Њ–ї—М–Ї–Њ –љ–∞—И–∞ ISR –Њ—В–Ї—А–Њ–µ—В —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–Є–є —Б–µ–Љ–∞—Д–Њ—А. –Ґ–µ–њ–µ—А—М, –≤ –Њ—В–ї–Є—З–Є–Є –Њ—В NKA-ISR, –љ–∞—И–∞ KA-ISR –Ј–љ–∞–µ—В –Њ —Б—Г—Й–µ—Б—В–≤–Њ–≤–∞–љ–Є–Є RTOS, —З—В–Њ –≤–Є–і–љ–Њ –љ–∞ —Б–ї–µ–і—Г—О—Й–µ–є –Ї–∞—А—В–Є–љ–Ї–µ. –Ч–і–µ—Б—М –њ–Њ–Ї–∞–Ј–∞–љ –Љ–Њ–Љ–µ–љ—В —А–∞–±–Њ—В—Л RTOS –њ—А–Є –Њ–±—А–∞–±–Њ—В–Ї–µ KA-ISR –Є –њ–µ—А–µ–Ї–ї—О—З–µ–љ–Є—П –љ–∞ LampTask —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–Љ. «–С–µ–Ј—В–Є–Ї–Њ–≤—Л–є» —Е–Њ–ї–Њ—Б—В–Њ–є —А–µ–ґ–Є–Љ (Dynamic Tick Rate) –Т–Њ –≤—Б–µ—Е –њ—А–µ–і—Л–і—Г—Й–Є—Е –њ—А–Є–Љ–µ—А–∞—Е –Љ—Л –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї–Є –і–µ—Д–Њ–ї—В–љ—Л–є —А–µ–ґ–Є–Љ RTOS, –њ—А–Є –Ї–Њ—В–Њ—А–Њ–Љ —В—А–µ–±—Г–µ—В—Б—П –Ј–∞–њ—А–Њ–≥—А–∞–Љ–Љ–Є—А–Њ–≤–∞—В—М –Њ–і–Є–љ –Є–Ј —В–∞–є–Љ–µ—А–Њ–≤ –Ь–Ъ –љ–∞ –њ–µ—А–Є–Њ–і–Є—З–µ—Б–Ї–Є–µ –њ—А–µ—А—Л–≤–∞–љ–Є—П («—В–Є–Ї–Є»), –Њ–±—Л—З–љ–Њ —Б –њ–µ—А–Є–Њ–і–Њ–Љ 1–Љ—Б, —З—В–Њ –Є –Њ–њ—А–µ–і–µ–ї—П–µ—В –≤—А–µ–Љ–µ–љ–љ–Њ–µ —А–∞–Ј—А–µ—И–µ–љ–Є–µ —Б–Є—Б—В–µ–Љ—Л. –Ъ–∞–ґ–і—Л–є —В–Є–Ї –њ—А–µ–і–њ–Њ–ї–∞–≥–∞–µ—В –≤—Л–Ј–Њ–≤ –µ–≥–Њ –Њ–±—А–∞–±–Њ—В—З–Є–Ї–∞ –њ—А–µ—А—Л–≤–∞–љ–Є—П, –≤—Л—З–Є—Б–ї–µ–љ–Є–µ —Д—Г–љ–Ї—Ж–Є–Є –њ–Њ—В–Њ–Ї–∞ TickTask (–µ—Б–ї–Є –Њ–љ–∞ —А–∞–Ј—А–µ—И–µ–љ–∞) –Є –≤—Л–Ј–Њ–≤ –њ–ї–∞–љ–Є—А–Њ–≤—Й–Є–Ї–∞ –і–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —Б–Є—В—Г–∞—Ж–Є–Є –≤ —Б–Є—Б—В–µ–Љ–µ, –љ–∞–њ—А–Є–Љ–µ—А, –њ–µ—А–µ–Ї–ї—О—З–µ–љ–Є—П –љ–∞ –њ–Њ—В–Њ–Ї –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—П –Є–ї–Є —Б–ї—Г–ґ–µ–±–љ—Л–є –њ–Њ—В–Њ–Ї IdleTask (–Њ–њ—П—В—М-–ґ–µ –µ—Б–ї–Є –Њ–љ —А–∞–Ј—А–µ—И—С–љ) –і–ї—П –њ–Њ–Љ–µ—Й–µ–љ–Є—П —Б–Є—Б—В–µ–Љ—Л –≤ —Б–Њ–љ. –≠—В–∞ —Б–Є—В—Г–∞—Ж–Є—П –њ–Њ–Ї–∞–Ј–∞–љ–∞ –љ–∞ —Б–ї–µ–і—Г—О—Й–µ–є –Ї–∞—А—В–Є–љ–Ї–µ, –≥–і–µ –Є—В–µ—А–∞—Ж–Є—П —Ж–Є–Ї–ї–∞ –≤ Task_1 –Ј–∞–і–µ—А–ґ–Є–≤–∞–µ—В—Б—П –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї–µ–Љ –љ–∞ 5–Љ—Б (—Б–Љ. [3]). –Я—А–Є —Н—В–Њ–Љ –Љ–Њ–ґ–µ—В –Њ–Ї–∞–Ј–∞—В—М—Б—П (–љ–∞—И —Б–ї—Г—З–∞–є), —З—В–Њ –њ—А–Є –±–Њ–ї—М—И–Є–љ—Б—В–≤–µ —В–Є–Ї–Њ–≤ –њ–µ—А–µ–Ї–ї—О—З–µ–љ–Є–µ –љ–∞ –њ–Њ—В–Њ–Ї–Є –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—П –љ–µ —В—А–µ–±—Г–µ—В—Б—П –Є —Б–Є—Б—В–µ–Љ–∞ –Љ–Њ–ґ–µ—В –њ—А–Њ–і–Њ–ї–ґ–∞—В—М –≤—Л–њ–Њ–ї–љ—П—В—М IdleTask. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —А–∞–Ј—Г–Љ–љ–Њ –≤–Љ–µ—Б—В–Њ –њ–µ—А–Є–Њ–і–Є—З–µ—Б–Ї–Є—Е –њ—А–µ—А—Л–≤–∞–љ–Є–є –≤—Л—З–Є—Б–ї–Є—В—М –Љ–Њ–Љ–µ–љ—В —Б–ї–µ–і—Г—О—Й–µ–є –∞–Ї—В–Є–≤–Є–Ј–∞—Ж–Є–Є –љ–µ–Ї–Њ—В–Њ—А–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—П –Є –љ–µ –њ—А–Њ–±—Г–ґ–і–∞—В—М –Ь–Ъ –і–Њ —Н—В–Њ–≥–Њ –≤—А–µ–Љ–µ–љ–Є. –Ґ.–µ. –Љ—Л –Ї–∞–Ї-–±—Л —Б—В–∞–≤–Є–Љ –±—Г–і–Є–ї—М–љ–Є–Ї –љ–∞ –Њ–њ—А–µ–і–µ–ї—С–љ–љ–Њ–µ –≤—А–µ–Љ—П –Є —Б–њ–Њ–Ї–Њ–є–љ–Њ —Б–њ–Є–Љ, –њ—А–Њ—Б—Л–њ–∞—П—Б—М –≤ —В–Њ—З–љ–Њ—Б—В–Є –Ї–Њ–≥–і–∞ –µ—Б—В—М —А–∞–±–Њ—В–∞. –Я—А–Є–Љ–µ—А –≤—Л—И–µ –њ—А–Є —Н—В–Њ–Љ –Є–Ј–Љ–µ–љ–Є—В—Б—П —Б–ї–µ–і—Г—О—Й–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ: –≠—В–Є–Љ –і–Њ—Б—В–Є–≥–∞–µ—В—Б—П, –Ї–∞–Ї –њ—А–∞–≤–Є–ї–Њ, –Њ—Й—Г—В–Є–Љ–Њ –Љ–µ–љ—М—И–µ–µ —В–Њ–Ї–Њ–њ–Њ—В—А–µ–±–ї–µ–љ–Є–µ —Б–Є—Б—В–µ–Љ—Л –Є –љ–∞–≥—А—Г–Ј–Ї–∞ –љ–∞ –њ—А–Њ—Ж–µ—Б—Б–Њ—А. –Я—А–µ–ґ–і–µ –Љ—Л –і–µ—Д–Њ–ї—В–љ–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–ї–Є —Б–Є—Б—В–µ–Љ–љ—Л–є —В–∞–є–Љ–µ—А SysTick, —В–∞–Ї—В–Є—А—Г–µ–Љ—Л–є –љ–∞ —З–∞—Б—В–Њ—В–µ —П–і—А–∞ –Ь–Ъ, —З—В–Њ –љ–µ –њ–Њ–Ј–≤–Њ–ї—П–ї–Њ –Њ—В–њ—А–∞–≤–Є—В—М –µ–≥–Њ –≤ –≥–ї—Г–±–Њ–Ї–Є–є —Б–Њ–љ. –°–µ–є—З–∞—Б, –њ–Њ–Љ–Є–Љ–Њ –Њ—А–≥–∞–љ–Є–Ј–∞—Ж–Є–Є –і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ —В–∞–Ї—В–Є—А–Њ–≤–∞–љ–Є—П, –Љ—Л –њ–µ—А–µ–Ї–ї—О—З–Є–Љ—Б—П –љ–∞ RTCC (Real Time Clock and Calendar) —В–∞–є–Љ–µ—А –Ь–Ъ, —Б–њ–Њ—Б–Њ–±–љ—Л–є —А–∞–±–Њ—В–∞—В—М –Њ—В –љ–Є–Ј–Ї–Њ—З–∞—Б—В–Њ—В–љ—Л—Е –≥–µ–љ–µ—А–∞—В–Њ—А–Њ–≤ —Б–Є—Б—В–µ–Љ—Л –≤ —Г—Б–ї–Њ–≤–Є—П—Е –≥–ї—Г–±–Њ–Ї–Њ–≥–Њ —Б–љ–∞, –Ї–Њ–≥–і–∞ —Б–Є—Б—В–µ–Љ–љ—Л–є –≥–µ–љ–µ—А–∞—В–Њ—А, —П–і—А–Њ –Ь–Ъ –Є –±—Л—Б—В—А–∞—П –њ–µ—А–Є—Д–µ—А–Є—П –љ–µ–∞–Ї—В–Є–≤–љ—Л. –Ф–ї—П —Н—В–Њ–≥–Њ, —А–∞–Ј—А–µ—И–Є–≤, –Ї–∞–Ї –Є —А–∞–љ–µ–µ, –≤—Б–µ —Б–ї—Г–ґ–µ–±–љ—Л–µ –њ–Њ—В–Њ–Ї–Є, –њ–µ—А–µ–Њ–њ—А–µ–і–µ–ї–Є–Љ –Ј–љ–∞—З–µ–љ–Є–µ OS_CFG_DYN_TICK_EN –≤ —Б—В—А–Њ–Ї–µ 83 —Д–∞–є–ї–∞ os_cfg.h –Ї–∞–Ї DEF_ENABLED. –Я—А–Є —Н—В–Њ–Љ —Д–∞–є–ї os_cfg.h —Б–Ї–Њ–њ–Є—А—Г–µ—В—Б—П –Є–Ј –њ–∞–њ–Ї–Є –Є–љ—Б—В–∞–ї–ї—П—Ж–Є–Є —Б–Є—Б—В–µ–Љ—Л –≤ –њ–∞–њ–Ї—Г external_copied_files –њ—А–Њ–µ–Ї—В–∞, –Њ—Б—В–∞–≤–Є–≤ –Њ—А–Є–≥–Є–љ–∞–ї –љ–µ–Є–Ј–Љ–µ–љ–љ—Л–Љ –і–ї—П –і—А—Г–≥–Є—Е –њ—А–Њ–µ–Ї—В–Њ–≤. –Т —Н—В–Њ–Љ-–ґ–µ —Д–∞–є–ї–µ –њ–Њ–Љ–µ–љ—П–µ–Љ –Ј–љ–∞—З–µ–љ–Є–µ OS_CFG_APP_HOOKS_EN —В–∞–Ї–ґ–µ –љ–∞ DEF_ENABLED. –≠—В–Є–Љ –Љ—Л —А–∞–Ј—А–µ—И–Є–Љ –≤—Л–Ј–Њ–≤ –Є–Ј —Б–ї—Г–ґ–µ–±–љ—Л—Е –њ–Њ—В–Њ–Ї–Њ–≤ RTOS —Б–њ–µ—Ж–Є–∞–ї—М–љ—Л—Е —Д—Г–љ–Ї—Ж–Є–є –≤ –Ї–Њ–і–µ –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—П (application hooks). –Ґ–∞–Ї–Њ–є «—Б–њ–µ—Ж–Є–∞–ї—М–љ–Њ–є —Д—Г–љ–Ї—Ж–Є–µ–є» —Г –љ–∞—Б –±—Г–і–µ—В —Д—Г–љ–Ї—Ж–Є—П OSIdleEnterHook(), —А–∞–±–Њ—В–∞—О—Й–∞—П –≤ —Б–Є—Б—В–µ–Љ–µ —Б–Њ–≤–Љ–µ—Б—В–љ–Њ —Б IdleTask (–Њ–љ–∞ –і–Њ–ї–ґ–љ–∞ –±—Л—В—М –Є–Љ–µ–љ–љ–Њ —В–∞–Ї –љ–∞–Ј–≤–∞–љ–∞, —З—В–Њ–±—Л —Б–Є—Б—В–µ–Љ–∞ –≤–Њ—Б–њ—А–Є–љ—П–ї–∞ –µ—С –љ–∞–і–ї–µ–ґ–∞—Й–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ), –≥–і–µ –Љ—Л –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ API –Є–Ј –±–Є–±–ї–Є–Њ—В–µ–Ї–Є EMLIB –і–ї—П –њ–Њ–≥—А—Г–ґ–µ–љ–Є—П –Ь–Ъ –≤ –≥–ї—Г–±–Њ–Ї–Є–є —Б–Њ–љ (—А–µ–ґ–Є–Љ Energy Mode 2 – EM2). –£–Ї–∞–Ј–∞–љ–љ—Л–µ –≤—Л—И–µ –Є–Ј–Љ–µ–љ–µ–љ–Є—П –Ј–љ–∞—З–µ–љ–Є–є –і–µ—Д–∞–є–љ–Њ–≤ –њ–µ—А–µ–Ї–Њ–љ—Д–Є–≥—Г—А–Є—А—Г—О—В RTOS –≤–љ—Г—В—А–Є –≤—Л–Ј–Њ–≤–∞ —Д—Г–љ–Ї—Ж–Є–Є BSP_TickInit() –љ–∞ –і—А—Г–≥–Њ–є –Є—Б—В–Њ—З–љ–Є–Ї —В–Є–Ї–Њ–≤ –Є –Ј–∞–Њ–і–љ–Њ —Б–Ї–Њ–љ—Д–Є–≥—Г—А–Є—А—Г—О—В —Б–∞–Љ —Н—В–Њ—В –Є—Б—В–Њ—З–љ–Є–Ї. –Я–Њ—Б–Ї–Њ–ї—М–Ї–Њ RTCC —В–∞–Ї—В–Є—А—Г–µ—В—Б—П –Њ—В –≥–µ–љ–µ—А–∞—В–Њ—А–∞ —Б —З–∞—Б—В–Њ—В–Њ–є 32768 Hz, –њ–Њ–ї—Г—З–Є—В—М –њ–µ—А–Є–Њ–і —В–Є–Ї–Њ–≤ –≤ 1–Љ—Б —Ж–µ–ї–Њ—З–Є—Б–ї–µ–љ–љ—Л–Љ –і–µ–ї–µ–љ–Є–µ–Љ —З–∞—Б—В–Њ—В—Л –Њ—В –љ–µ–≥–Њ –љ–µ–≤–Њ–Ј–Љ–Њ–ґ–љ–Њ. –Я–Њ—Н—В–Њ–Љ—Г –Є–Ј–Љ–µ–љ–Є–Љ –≤ –љ–∞—З–∞–ї–µ main() —З–∞—Б—В–Њ—В—Г —В–Є–Ї–Њ–≤ —Б 1000 Hz –љ–∞ 1024 Hz. –≠—В–Є–Љ —Г–ї—Г—З—И–Є—В—Б—П —В–Њ—З–љ–Њ—Б—В—М —А–∞—Б—Б—З—С—В–∞ —Б–Є—Б—В–µ–Љ–Њ–є –≤—Б–µ—Е –≤—А–µ–Љ–µ–љ–љ—Л—Е –Є–љ—В–µ—А–≤–∞–ї–Њ–≤ –Є —Г–Љ–µ–љ—М—И–Є—В—Б—П –Є—Е –і—А–Њ–ґ–∞–љ–Є–µ (jitter). –Я–Њ—Б–Љ–Њ—В—А–Є–Љ, —З–µ–≥–Њ-–ґ–µ –Љ—Л –і–Њ–±–Є–ї–Є—Б—М —Н—В–Є–Љ–Є –Љ–∞–љ–Є–њ—Г–ї—П—Ж–Є—П–Љ–Є. –Я–Њ—Б–ї–µ –Ј–∞–≥—А—Г–Ј–Ї–Є –Ї–Њ–і–∞ –≤ –Ь–Ъ –Є –Ј–∞–њ—Г—Б–Ї–∞ —Б–Є—Б—В–µ–Љ—Л SystemView –≤–Є–і–Є–Љ, —З—В–Њ –њ–µ—А–Є–Њ–і–Є—З–µ—Б–Ї–Є–µ —В–Є–Ї–Є —Б –њ–µ—А–Є–Њ–і–Њ–Љ 1–Љ—Б –Є—Б—З–µ–Ј–ї–Є –Є TickTask –≤—Л–Ј—Л–≤–∞–µ—В—Б—П –Ї–Њ–≥–і–∞ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ. –Э–∞ –Ї–∞—А—В–Є–љ–Ї–µ –љ–Є–ґ–µ —Н—В–Њ –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –њ—А–Є –≤—Л–Ј–Њ–≤–µ –µ–і–Є–љ—Б—В–≤–µ–љ–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ –њ–Њ–ї—М–Ј–Њ–≤–∞—В–µ–ї—П (–Ї–Њ—В–Њ—А—Л–є –Љ–Њ—А–≥–∞–µ—В —Б–≤–µ—В–Њ–і–Є–Њ–і–Њ–Љ) –Є —В–∞–Ї–ґ–µ –њ—А–Є –њ–µ—А–Є–Њ–і–Є—З–µ—Б–Ї–Њ–Љ –≤—Л–Ј–Њ–≤–µ —Б–Є—Б—В–µ–Љ–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ TimerTask. –°–ї–µ–і—Г—О—Й–Є–Љ —И–∞–≥–Њ–Љ –≤ –њ–ї–∞–љ–µ —Г–Љ–µ–љ—М—И–µ–љ–Є—П –љ–∞–≥—А—Г–Ј–Ї–Є –љ–∞ –њ—А–Њ—Ж–µ—Б—Б–Њ—А –Є —Г–Љ–µ–љ—М—И–µ–љ–Є—П —В–Њ–Ї–Њ–њ–Њ—В—А–µ–±–ї–µ–љ–Є—П —Б–ї–µ–і—Г–µ—В –Ј–∞–њ—А–µ—В–Є—В—М –љ–µ–Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–љ—Л–µ –њ—А–Є–ї–Њ–ґ–µ–љ–Є–µ–Љ —Б–ї—Г–ґ–µ–±–љ—Л–µ –њ–Њ—В–Њ–Ї–Є, —В–∞–Ї–Є–µ –Ї–∞–Ї TimerTask –Є StatTask. –Т —В—А–µ—В—М–µ–є —З–∞—Б—В–Є —Б—В–∞—В—М–Є –њ—А–Њ Bluetooth –Љ—Л –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ –і—А—Г–≥—Г—О –і–µ–Љ–Њ-–њ–ї–∞—В—Г –і–ї—П –і–µ–Љ–Њ–љ—Б—В—А–∞—Ж–Є–Є –Ї–∞—А–і–Є–љ–∞–ї—М–љ–Њ–≥–Њ –Є–Ј–Љ–µ–љ–µ–љ–Є—П –≤ —В–Њ–Ї–Њ–њ–Њ—В—А–µ–±–ї–µ–љ–Є–Є. –Ъ–Њ–љ–µ—З–љ–Њ, –Ј–і–µ—Б—М —П —А–∞—Б—Б–Ї–∞–Ј–∞–ї –љ–µ –њ—А–Њ –≤—Б–µ –∞—Б–њ–µ–Ї—В—Л Micriµm OS, –∞ –Ї–Њ—Б–љ—Г–ї—Б—П –ї–Є—И—М —Б–∞–Љ—Л—Е –љ–∞–Є–±–Њ–ї–µ–µ —З–∞—Б—В–Њ –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л—Е, –њ—А–Є—З—С–Љ –і–∞–ї–µ–Ї–Њ –љ–µ –≤–Њ –≤—Б–µ—Е –њ–Њ–і—А–Њ–±–љ–Њ—Б—В—П—Е. –Ґ–µ–Љ –љ–µ –Љ–µ–љ–µ–µ, –і—Г–Љ–∞—О, —Н—В–Њ–≥–Њ –±—Г–і–µ—В –і–Њ—Б—В–∞—В–Њ—З–љ–Њ –і–ї—П –љ–∞—З–∞–ї—М–љ–Њ–≥–Њ —Б—В–∞—А—В–∞ —А–∞–±–Њ—В—Л —Б —Б–Є—Б—В–µ–Љ–Њ–є, –∞ –љ–µ–і–Њ—Б—В–∞—О—Й–Є–µ –і–µ—В–∞–ї–Є –Љ–Њ–ґ–љ–Њ —Г–Ј–љ–∞—В—М –Є–Ј –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є–Є [2]. –Ы–Є—В–µ—А–∞—В—Г—А–∞ 1. Micriµm publications
–§–∞–є–ї—Л: –Т—Б–µ –≤–Њ–њ—А–Њ—Б—Л –≤ –§–Њ—А—Г–Љ.
|
|
|||||||||||||||
 |
 |


 |
||||
|
|
||||


















–†–∞–±–Њ—В–Њ—Б–њ–Њ—Б–Њ–±–љ–Њ—Б—В—М —Б–∞–є—В–∞ –њ—А–Њ–≤–µ—А–µ–љ–∞ –≤ –±—А–∞—Г–Ј–µ—А–∞—Е:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–Р–і–∞–њ—В–Є—А–Њ–≤–∞–љ –і–ї—П —А–∞–±–Њ—В—Л –њ—А–Є —А–∞–Ј—А–µ—И–µ–љ–Є—П—Е —Н–Ї—А–∞–љ–∞ –Њ—В 1280—Е1024 –Є –≤—Л—И–µ.
–Я—А–Є –Љ–µ–љ—М—И–Є—Е —А–∞–Ј—А–µ—И–µ–љ–Є—П—Е –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ –њ–Њ—П–≤–ї–µ–љ–Є–µ –≥–Њ—А–Є–Ј–Њ–љ—В–∞–ї—М–љ–Њ–є –њ—А–Њ–Ї—А—Г—В–Ї–Є.
–Я–Њ –≤—Б–µ–Љ –≤–Њ–њ—А–Њ—Б–∞–Љ –Њ–±—А–∞—Й–∞–є—В–µ—Б—М –Ї –Ъ–Њ—В—Г: kot@radiokot.ru
©2005-2024