 |
 |
||||||||||||
ąĀąŠą▒ąŠčé-ą│ąĄą║čüą░ą┐ąŠą┤
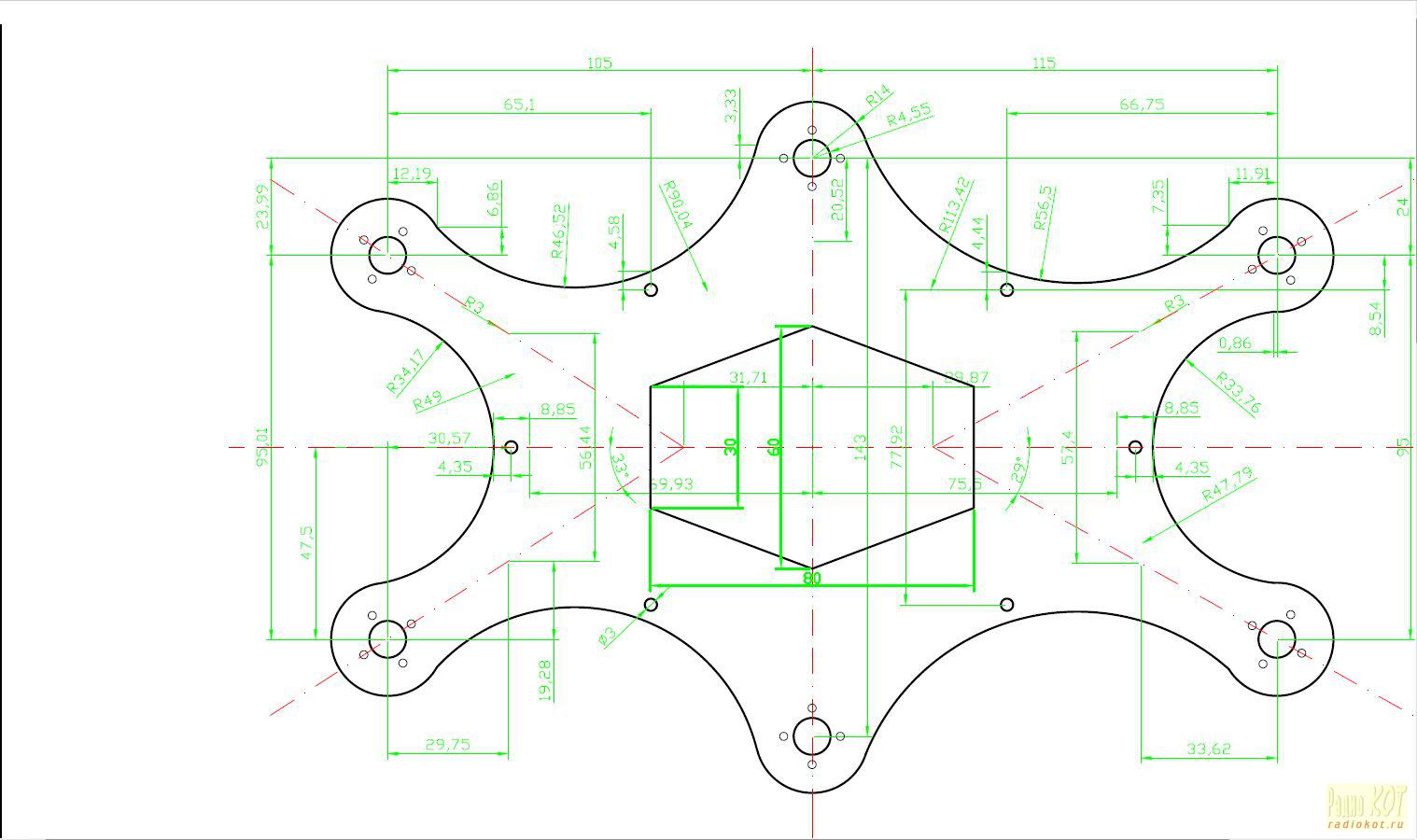
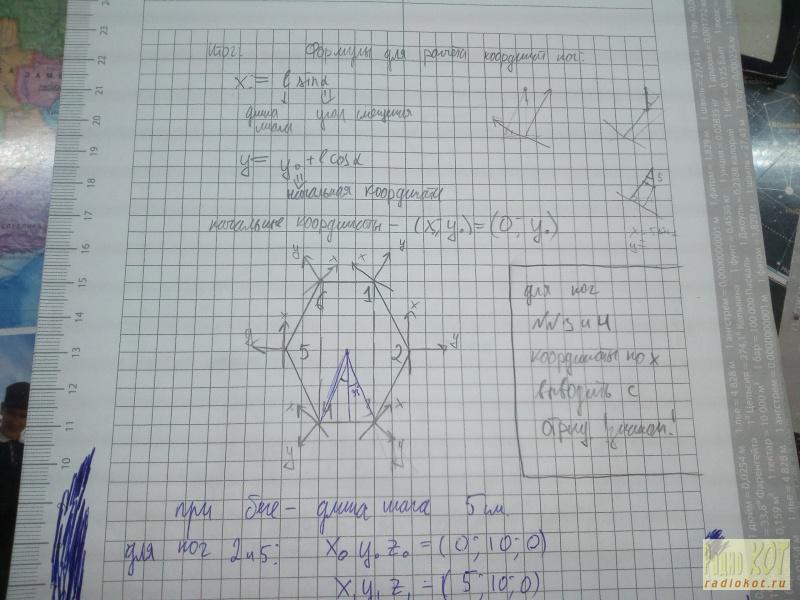
ąÉą▓č鹊čĆ: KondorFedor ą¤čĆąĄą┤ąĖčüą╗ąŠą▓ąĖąĄ ą×čéą┤čŗčģą░čÅ ą╗ąĄč鹊ą╝ ąĮą░ ą▒ąĄčĆąĄą│čā ąøą░ą┤ąŠąČčüą║ąŠą│ąŠ ąŠąĘąĄčĆą░, čÅ čüąĖą╗čīąĮąŠ ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗čüčÅ ą┐ą░čāą║ą░ą╝ąĖ. ąöą░ąČąĄ ąĘą░ą▓ąĄą╗ ąŠą┤ąĮąŠą│ąŠ ą▓ ą┐ą░ą╗ą░čéą║ąĄ ąĖ ą┐ąŠą┤ą▒čĆą░čüčŗą▓ą░ą╗ ąĄą╝čā ą╝čāčģ ąĖ ą║ąŠą╝ą░čĆąŠą▓. ąØą░ą▒ą╗čÄą┤ą░čéčī ąĘą░ ąĄą│ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅą╝ąĖ ą┐ąŠą┤ ą║čĆčŗčłąĄą╣ ą┐ą░ą╗ą░čéą║ąĖ ą▒čŗą╗ąŠ ąŠč湥ąĮčī čāą▓ą╗ąĄą║ą░č鹥ą╗čīąĮąŠ, ą┐ąŠčŹč鹊ą╝čā ą┐ąŠ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĖčÄ čÅ čĆąĄčłąĖą╗ «ą▓ąŠčüčüąŠąĘą┤ą░čéčī» ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ ąĮąŠą│ ą┐ą░čāą║ą░. ą¦ą░čüčéčī Ōä¢1: ąĪąĄčĆą▓ąŠą┐čĆąĖą▓ąŠą┤ą░ ąÆ ąĖąĮč鹥čĆąĮąĄč鹥 čÅ ąŠčéčŗčüą║ą░ą╗ ąŠą│čĆąŠą╝ąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘąĮčŗčģ ą▓ąĖą┤ąĄąŠ ąĖ čüčéą░č鹥ą╣ čü ą┐ąŠą┤ąŠą▒ąĮčŗą╝ąĖ čĆąŠą▒ąŠčéą░ą╝ąĖ, ąĮąŠ ąĮąĖą║č鹊 ąĮąĄ ą▓čŗą║ą╗ą░ą┤čŗą▓ą░ą╗ č湥čĆč鹥ąČąĖ čéčāą╗ąŠą▓ąĖčēą░ ąĖ ąĮąŠą│. ąÜąŠąĮčüčéčĆčāą║čåąĖčÄ ą▒čŗą╗ąŠ čĆąĄčłąĄąĮąŠ ą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą▓ąŠčé čü čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░: ą¤ąŠą┤ą▓ąĖąČąĮąŠčüčéčī ąĮąŠą│ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčé čüąĄčĆą▓ąŠą┐čĆąĖą▓ąŠą┤ą░, ą┐ąŠ čéčĆąĖ ąĮą░ ą║ą░ąČą┤čāčÄ ąĮąŠą│čā — ą┤ą▓ą░ ąĮą░ čüą│ąĖą▒ą░ąĮąĖąĄ ąĮąŠą│ąĖ, ąŠą┤ąĖąĮ ąĮą░ ą┐ąŠą▓ąŠčĆąŠčé. ą» čĆą░čüčüčćąĖčéčŗą▓ą░ą╗ ą▓ąĘčÅčéčī čüčĆąĄą┤ąĮąĖąĄ ą┐ąŠ čāčüąĖą╗ąĖčÄ ą┐čĆąĖą▓ąŠą┤ą░ – 3.5 ą║ą│/čüą╝. ą×ą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ ą║ą░ąĮą┤ąĖą┤ą░čéčāčĆąŠą╣ čÅą▓ą╗čÅą╗ąĖčüčī ą┐čĆąĖą▓ąŠą┤ą░ Tower Pro SG5010, ą▓ąŠčé č乊č鹊: ą¤ąĄčĆą▓čŗą╝ ą┤ąĄą╗ąŠą╝ čÅ čāąĘąĮą░ą╗ čåąĄąĮčā čā ąĮą░čü ą▓ ą╝ąĄčüčéąĮčŗčģ ą╝ą░ą│ą░ąĘąĖąĮą░čģ. ą¤ąŠą║čāą┐ą░čéčī ąĘą┤ąĄčüčī čéčāčé ąČąĄ čĆą░čüčģąŠč鹥ą╗ąŠčüčī, ąĖą▒ąŠ čåąĄąĮą░ ą║ąŠą╗ąĄą▒ą░ą╗ą░čüčī ąŠčé 500 ą┤ąŠ 750 čĆčāą▒ą╗ąĄą╣ ąĘą░ ą┐čĆąĖą▓ąŠą┤. ą¤ąŠčŹč鹊ą╝čā, ąĮąĄ ą┤ąŠą╗ą│ąŠ ą┤čāą╝ą░čÅ, čÅ ąĘą░ą║ą░ąĘą░ą╗ ą┐ą░čĆčéąĖčÄ ą┐čĆąĖą▓ąŠą┤ąŠą▓ ą▓ ą¤ąŠą┤ąĮąĄą▒ąĄčüąĮąŠą╣, čģąŠčéčī ą╝ąĄąĮčÅ ąĖ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ą░ą╗ąĖ, čćč鹊 ą╝ąĮąĄ ą┐čĆąĖą┤ąĄčé «ąÜąŠčé ą▓ ą╝ąĄčłą║ąĄ». ąÜąŠčé ą▓ ą╝ąĄčłą║ąĄ ą┐čĆąĖčłąĄą╗. ąØą░čćąĮąĄą╝ čü č鹊ą│ąŠ, čćč鹊 ąĖąĘ 20 ąĘą░ą║ą░ąĘą░ąĮąĮčŗčģ ą┐čĆąĖą▓ąŠą┤ąŠą▓ ą┐ąŠ čåąĄąĮąĄ 263 čĆčāą▒. ąĘą░ čłčéčāą║čā, 7 ąŠą║ą░ąĘą░ą╗ąŠčüčī ąĮąĄčĆą░ą▒ąŠčćąĖą╝ąĖ. ą¤čĆąŠčüč鹊 ąĮąĄ čĆą░ą▒ąŠčéą░ą╗ą░ 菹╗ąĄą║čéčĆąŠąĮąĖą║ą░ ąĖ ą▓čüąĄ! ą£ąŠč鹊čĆčŗ ąŠą║ą░ąĘą░ą╗ąĖčüčī čĆą░ą▒ąŠčćąĖąĄ. ąĪ čĆąĄą┤čāą║č鹊čĆą░ą╝ąĖ ą▓ąŠąŠą▒čēąĄ ąŠčéą┤ąĄą╗čīąĮą░čÅ ą┐ąĄčüąĮčÅ – ąŠąĮąĖ ą┐čĆąĖčłą╗ąĖ ą▒ąĄąĘ čüč鹊ą┐ąŠčĆąŠą▓! ąĢčüą╗ąĖ čā ąŠą▒čŗčćąĮąŠą│ąŠ ą┐čĆąĖą▓ąŠą┤ą░ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą▓čĆą░čēąĄąĮąĖčÅ 180 ą│čĆą░ą┤čāčüąŠą▓, č鹊 čā čŹčéąĖčģ — 360. ąØą░ č乊č鹊: čĆąĄą┤čāą║č鹊čĆ ą║ąĖčéą░ą╣čüą║ąŠą│ąŠ ą┐čĆąĖą▓ąŠą┤ą░, ąĮą░ ą│ą╗ą░ą▓ąĮąŠą╣ čłąĄčüč鹥čĆąĄąĮą║ąĖ ąŠčéč湥čéą╗ąĖą▓ąŠ ą▓ąĖą┤ąĮąŠ ąŠčéčüčāčéčüčéą▓ąĖąĄ čüč鹊ą┐ąŠčĆą░. ąØą░ čŹč鹊ą╝ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĮąĄ ą║ąŠąĮčćąĖą╗ąĖčüčī — čā čłąĄčüč鹥čĆąĄąĮąŠą║ ą▓ čĆąĄą┤čāą║č鹊čĆą░čģ ąŠčéą╗ąĄčéą░ą╗ąĖ ąĘčāą▒čīčÅ ą┐čĆąĖ ą╝ą░ą╗ąĄą╣čłąĄą╣ ąĮą░ą│čĆčāąĘą║ąĄ ąĖ ą│ąŠčĆąĄą╗ą░ 菹╗ąĄą║čéčĆąŠąĮąĖą║ą░, ą║ąŠč鹊čĆą░čÅ č鹊ąČąĄ ąŠčéą╗ąĖčćą░ą╗ą░čüčī ąŠčé ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╣. ą¦ą░čüčéčī Ōä¢2: ą£ąĄčģą░ąĮąĖą║ą░ ą¦ąĄčĆč鹥ąČąĖ čĆąĄčłąĄąĮąŠ ą▒čŗą╗ąŠ ą┤ąĄą╗ą░čéčī ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ AutoCAD 2011, ą░ ą┤ąĄčéą░ą╗ąĖ ąĖąĘą│ąŠčéą░ą▓ą╗ąĖą▓ą░čéčī ąĖąĘ ąŠčĆą│čüč鹥ą║ą╗ą░ č鹊ą╗čēąĖąĮąŠą╣ 4ą╝ą╝ ą╝ąĄč鹊ą┤ąŠą╝ ą╗ą░ąĘąĄčĆąĮąŠą╣ čĆąĄąĘą║ąĖ, čüą┐ą░čüąĖą▒ąŠ čĆąĄą▒čÅčéą░ą╝ ąĖąĘ ą”ąøąó, ą▓čŗčĆčāčćąĖą╗ąĖ (ą”ąøąó — čåąĄąĮčéčĆ ą╗ą░ąĘąĄčĆąĮčŗčģ č鹥čģąĮąŠą╗ąŠą│ąĖą╣). ąĢčüą╗ąĖ čü č湥čĆč鹥ąČą░ą╝ąĖ ąĮąŠą│ ąĖ ąĮąĖąČąĮąĄą╣ ą┐ą╗ą░čüčéąĖąĮčŗ ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄ ą▓ąŠąĘąĮąĖą║ą╗ąŠ, č鹊 ąĮą░ą┤ ą▓ąĄčĆčģąĮąĄą╣ ą┐ą╗ą░čüčéąĖąĮąŠą╣ ą┐čĆąĖčłą╗ąŠčüčī ą┐ąŠą┐ąŠč鹥čéčī. ąÆ ąĮąĄą╣ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ą╗ąŠčüčī ąŠčéą▓ąĄčĆčüčéąĖąĄ ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ čłą╗ąĄą╣č乊ą▓ ąĮą░ čüąĄčĆą▓čŗ. ąØą░ ą┐ąĄčĆą▓ąŠą╣ ą▓ąĄčĆčüąĖąĖ ą┤ą░ąĮąĮąŠą╣ ą┤ąĄčéą░ą╗ąĖ ąŠčéą▓ąĄčĆčüčéąĖąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąĮčā ąŠč湥ąĮčī ą▒ąŠą╗čīčłąĖą╝, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅ ą┐ąŠą╗čāčćąĖą╗ą░čüčī, ą╝čÅą│ą║ąŠ ą│ąŠą▓ąŠčĆčÅ, ą╗ąŠą╝ą║ą░čÅ ąĖ čģčĆčāą┐ą║ą░čÅ. ążąŠč鹊 č湥čĆč鹥ąČą░ ą┐ąĄčĆą▓ąŠą╣ ą▓ąĄčĆčüąĖąĖ: ą¤čĆąĖ ą┐ąĄčĆą▓ąŠą╝ ąČąĄ č鹥čüč鹥 ąŠąĮą░ čéčĆąĄčüąĮčāą╗ą░ ąĖ čā ąĮąĄąĄ ąŠčéą▓ą░ą╗ąĖą╗čüčÅ ą║čāčüąŠą║. ąśčüą┐čŗčéą░ąĮąĖčÅ ą▒čŗą╗ąĖ čéčāčé ąČąĄ ąŠčéą╗ąŠąČąĄąĮčŗ ą▓ ą┤ąŠą╗ą│ąĖą╣ čÅčēąĖą║, ą░ čÅ čüąĄą╗ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čéčī ą▓č鹊čĆčāčÄ ą▓ąĄčĆčüąĖčÄ ą┐ą╗ą░čüčéąĖąĮčŗ. ążąŠč鹊 č湥čĆč鹥ąČą░ ą▓č鹊čĆąŠą╣ ą▓ąĄčĆčüąĖąĖ: ąÆčüąĄ ąŠčüčéą░ą╗ąŠčüčī ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ąŠą┤ąĮąŠą│ąŠ — ąŠčéą▓ąĄčĆčüčéąĖąĄ ą▒čŗą╗ąŠ čüąĖą╗čīąĮąŠ čāą╝ąĄąĮčīčłąĄąĮąŠ ąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąŠ ą▓ čåąĄąĮčéčĆ ą┐ą╗ą░čüčéąĖąĮčŗ. ąØąŠą▓ą░čÅ ą┤ąĄčéą░ą╗čī ąŠą║ą░ąĘą░ą╗ą░čüčī ą▓ čĆą░ąĘčŗ ą┐čĆąŠčćąĮąĄąĄ ą┐ąĄčĆą▓ąŠą╣ ąĖ ą▓čŗą┤ąĄčƹȹ░ą╗ą░ ą┤ą░ąČąĄ ą┐ą░ą┤ąĄąĮąĖąĄ čüąŠ čüč鹊ą╗ą░. ąĪąĄčĆą▓ąŠą┐čĆąĖą▓ąŠą┤ą░ ą║čĆąĄą┐ąĖą╗ąĖčüčī ą║ ą┤ąĄčéą░ą╗čÅą╝ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ čéą░ą║ąĖčģ ą▓ąŠčé čĆą░ą╝: ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ, ąŠčéą▓ąĄčćą░čÄčēąĄąĄ ąĘą░ čĆą░ąĘą▓ąŠčĆąŠčé ąĮąŠą│ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ čéą░ą║ąĖčģ ą┤ąĄčéą░ą╗ąĄą╣. ąØą░ ąĮąĖąČąĮčÄčÄ ąĘą░ą║čĆąĄą┐ą╗ąĄąĮ čäą╗ą░ąĮčåąĄą▓čŗą╣ ą┐ąŠą┤čłąĖą┐ąĮąĖą║ 3*10*4, č鹊ąČąĄ ąĘą░ą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ ąÜąĖčéą░ąĄ. ą¤ąŠčüą╗ąĄ ą┐ąĄčĆą▓čŗčģ ąĖčüą┐čŗčéą░ąĮąĖą╣ ą▒čŗą╗ ą▓čŗčÅą▓ą╗ąĄąĮ ą║ąŠą╗ąŠčüčüą░ą╗čīąĮčŗą╣ ą╗čÄčäčé ą║ą░ąČą┤ąŠą╣ ąĮąŠą│ąĖ (ąŠčĆą│čüč鹥ą║ą╗ąŠ ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ ą│ąĮąĄčéčüčÅ, ą┐ą╗čÄčü čüąĄčĆą▓čŗ ą╗čÄčäčéčÅčé), ąĖąĘ-ąĘą░ ą║ąŠč鹊čĆąŠą│ąŠ čĆąŠą▒ąŠčé ą╝ąŠą│ čģąŠą┤ąĖčéčī č鹊ą╗čīą║ąŠ čéą░ą║: ą×čé ą╗čÄčäčéą░ ą║ąŠč鹊čĆąŠą│ąŠ čĆąĄčłąĄąĮąŠ ą▒čŗą╗ąŠ čāčģąŠą┤ąĖčéčī ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čéčÅą│ ąĮą░ ą┐ąŠą┤čłąĖą┐ąĮąĖą║ąĖ 3*10*4 (č湥čĆč鹥ąČąĖ čéčÅą│ č鹥 ąČąĄ). ąŁč鹊 čģąŠčĆąŠčłąŠ ą▓ąĖą┤ąĮąŠ ąĮą░ č乊č鹊ą│čĆą░čäąĖąĖ čĆąŠą▒ąŠčéą░ čüą┐ąĄčĆąĄą┤ąĖ: ą¦ą░čüčéčī Ōä¢3: ąŁą╗ąĄą║čéčĆąŠąĮąĖą║ą░ ąĖ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ąśąĘąĮą░čćą░ą╗čīąĮąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĄčĆą▓ą░ą╝ąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ą╗ąŠčüčī čüą┤ąĄą╗ą░čéčī ąĮą░ ą£ąÜ Atmega16 ąĮąŠ, ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ, čÅ ąĮąĄ čüą╝ąŠą│ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüčĆą░ąĘčā 18-čÄ ą┐čĆąĖą▓ąŠą┤ą░ą╝ąĖ — ąĮąĄ čģą▓ą░čéąĖą╗ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓. ą¤ąŠčŹč鹊ą╝čā ąĖąĘ ąĘą░ą│ą░čłąĮąĖą║ąŠą▓ ą▒čŗą╗ą░ ą▓čŗčéą░čēąĄąĮą░ ą║ąĖčéą░ą╣čüą║ą░čÅ ą┐ą╗ą░čéą░-ą║ą╗ąŠąĮ Arduino Mega 2560, ąŠčćąĖčēąĄąĮą░ ąŠčé ą┐čŗą╗ąĖ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā. ąóąŠą╗čīą║ąŠ ą▓ąŠčé ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ąŠąĮą░ ąĮąĖ ąĘą░ čćč鹊 ąĮąĄ čģąŠč鹥ą╗ą░. ąóčēą░č鹥ą╗čīąĮąŠ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ą▓ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĮąĄąĖčüą┐čĆą░ą▓ąĮąŠčüčéąĖ, ą▒čŗą╗ą░ ą▓čŗčüą║ą░ąĘą░ąĮą░ ą│ąĖą┐ąŠč鹥ąĘą░ ąŠ ąĮąĄąĖčüą┐čĆą░ą▓ąĮąŠčüčéąĖ ą║ą▓ą░čĆčåą░. ąōąĖą┐ąŠč鹥ąĘą░ ąŠą║ą░ąĘą░ą╗ą░čüčī čĆą░ą▒ąŠč湥ą╣, ą║ą▓ą░čĆčå ą┐ąĄčĆąĄą┐ą░čÅą╗, ą┐ą╗ą░čéą░ ąĮą░čćą░ą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčīčüčÅ ąĖ čłąĖčéčīčüčÅ. ążąŠč鹊 ą┐ą╗ą░čéčŗ čü ą┐ąĄčĆąĄą┐ą░čÅąĮąĮčŗą╝ ą║ą▓ą░čĆčåąĄą╝: ąŁąĮąĄčĆą│ąŠąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ ąĮą░ 6 ąÆ 4500 ą╝ąÉ*čć, ą║čāą┐ą╗ąĄąĮąĮčŗą╣ čéą░ą║ąČąĄ ą▓ ąÜąĖčéą░ąĄ. ąÉą║ą║čāą╝čāą╗čÅč鹊čĆ Ni-Mh ą┐ąŠčŹč鹊ą╝čā ąĘą░čĆčÅąČą░čÄ ąĄą│ąŠ ąŠčé ąŠą▒čŗčćąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą┐ąĖčéą░ąĮąĖčÅ.ąóąĄą┐ąĄčĆčī ąŠą▒ ą░ą╗ą│ąŠčĆąĖčéą╝ą░čģ. ą£ąĮąĄ ą▒čŗą╗ąŠ ą▒čŗ ą╗ąĄąĮčī ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐ąŠčüč鹊čÅąĮąĮąŠ ąĘą░ą┤ą░ą▓ą░čéčī čāą│ą╗čŗ ą┤ą╗čÅ 18-čéąĖ čüąĄčĆą▓, ą┐ąŠčŹč鹊ą╝čā čÅ čĆąĄčłąĖą╗ ąĮą░ą┐ąĖčüą░čéčī ą░ą╗ą│ąŠčĆąĖčéą╝, ą▓ ą║ąŠč鹊čĆčŗą╣ čÅ ąĘą░ą▒ąĖą▓ą░čÄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ č鹊čćą║ąĖ, ą▓ ą║ąŠč鹊čĆčāčÄ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčīčüčÅ ą║ąŠąĮąĄčå ąĮąŠą│ąĖ. ąÆčüąĄ čāą│ą╗čŗ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┤ąŠą╗ąČąĄąĮ čĆą░čüčüčćąĖčéčŗą▓ą░čéčī čüą░ą╝, ąĖčüčģąŠą┤čÅ ąĖąĘ č鹊ą│ąŠ, čćč鹊 č鹊čćą║ą░ ąĮą░čćą░ą╗ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé — č鹊čćą║ą░ ą║čĆąĄą┐ą╗ąĄąĮąĖčÅ ąĮąŠą│ąĖ ą║ čéčāą╗ąŠą▓ąĖčēčā čĆąŠą▒ąŠčéą░, č鹊 ąĄčüčéčī, čĆąĄčłą░čéčī ąĘą░ą┤ą░čćčā ąĖąĮą▓ąĄčĆčüąĮąŠą╣ ą║ąĖąĮąĄą╝ą░čéąĖą║ąĖ — ą║ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ čĆą░čüčüčćąĖčéčŗą▓ą░čéčī čāą│ą╗čŗ. ąĪąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą║ą░ąČą┤ąŠą╣ ąĮąŠą│ąĖ ą┐čĆąĖą║čĆąĄą┐ą╗čÅčÄ ąĮą░ č乊č鹊: ąÉą╗ą│ąŠčĆąĖčéą╝ ą▒čŗą╗ ąĮą░ą┐ąĖčüą░ąĮ, ąĮąĄ ą▓čŗčģąŠą┤čÅ ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ čłą║ąŠą╗čīąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą░ą╗ą│ąĄą▒čĆčŗ ąĖ ą│ąĄąŠą╝ąĄčéčĆąĖąĖ ąĖ ąŠč乊čĆą╝ą╗ąĄąĮ ą▓ čåąĄą╗čāčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā. ąÆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ čüąŠąĘą┤ą░ąĄčéčüčÅ ąĮąŠą▓čŗą╣ ąŠą▒čŖąĄą║čé ą║ą╗ą░čüčüą░ Leg, čäčāąĮą║čåąĖąĄą╣ attach(int, int, int, bool, bool) čüąĄčĆą▓čŗ ąĮąŠą│ąĖ ą┐čĆąĖą║čĆąĄą┐ą╗čÅčÄčéčüčÅ ą║ ą┐ąŠčĆčéą░ą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čüąĮą░čćą░ą╗ą░ — čüąĄčĆą▓ąŠ, ąŠčéą▓ąĄčćą░čÄčēąĖą╣ ąĘą░ ą┐ąŠą▓ąŠčĆąŠčé, ą┐ąŠč鹊ą╝ - ąĘą░ «ą▒ąĄą┤čĆąŠ», ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ - «ąĘą░ ą║ąŠą╗ąĄąĮąŠ»), ą░ čéą░ą║ąČąĄ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ ąĮąŠą│ą░ ąĮą░ ą╗ąĄą▓ąŠą╝ ą▒ąŠčĆčéčā ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┤ą▓ąĖąČąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗ąĄąĮ — ąŠąĮ čāą║ą░ąĘčŗą▓ą░ąĄčé, čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ ąĮąŠą│ą░ ą┐ąĄčĆąĄą┤ąĮąĄą╣ ąĖą╗ąĖ ąĘą░ą┤ąĮąĄą╣. ąŁč鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ čĆą░čüč湥čéą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą▓čŗą┤ą▓ąĖąČąĄąĮąĖčÅ ąĮąŠą│ąĖ ą▓ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé čéčāą╗ąŠą▓ąĖčēą░. ąĪąĖčÅ čäčāąĮą║čåąĖčÅ ąĄčēąĄ čüąĖą╗čīąĮąŠ čüčŗčĆą░čÅ, čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄ ąĄą╣ ąĮąĄ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ. ąöą░ą╗ąĄąĄ čäčāąĮą║čåąĖąĄą╣ set(float x, float y, float z) ąĘą░ą┤ą░ąĄčéčüčÅ č鹊čćą║ą░ ąŠčéčüč湥čéą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĮąŠą│ąĖ (čŹčéčā čäčāąĮą║čåąĖčÄ ąĮą░ą┐ąĖčüą░ą╗, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą╗ąĄą│ą║ąŠ ąĖąĘą╝ąĄąĮčÅčéčī ą║ą╗ąĖčĆąĄąĮčü — ąĘą░ą┤ą░ą╗ ąĮąŠą▓čŗą╣ — ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░ą╣ ą┐čĆąŠą┐ąĖčüčŗą▓ą░čéčī č鹥 ąČąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą┤ą╗čÅ čģąŠą┤čīą▒čŗ, ąĮąĖč湥ą│ąŠ ą╝ąĄąĮčÅčéčī ąĮąĄ ąĮą░ą┤ąŠ, čāą┤ąŠą▒ąĮąŠ ą┤ąŠ ąČčāčéąĖ). ąś, ąĮą░ą║ąŠąĮąĄčå, čäčāąĮą║čåąĖąĄą╣ move( float x, float y, float z, bool) ą╝čŗ ąĘą░ą┤ą░ąĄą╝, ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ąĮą░čłąĄą╣ ąĮąŠą│ąĖ. Bool, ą┐ąŠ ą▒ąŠą╗čīčłąŠą╝čā čüč湥čéčā, ąĮąĄ ąĮčāąČąĄąĮ, ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĮąĄ čāą║ą░ąĘčŗą▓ą░čéčī. ą» ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ąĄą│ąŠ ą┤ą╗čÅ čĆą░čüč湥čéą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą▓čŗą┤ą▓ąĖąČąĄąĮąĖčÅ ąĮąŠą│ąĖ ą▓ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé čéčāą╗ąŠą▓ąĖčēą░. ąæąĖą▒ą╗ąĖąŠč鹥ą║čā ą┐čĆąĖą║čĆąĄą┐ą╗čÄ ą║ čüčéą░čéčīąĄ. ąóąĄčüčé ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĮą░ ąŠą┤ąĮąŠą╣ ąĮąŠą│ąĄ, ą║ąŠč鹊čĆą░čÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čüą║čĆąĄą▒čāčēąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ ą┐ąŠ čüč鹊ą╗čā: ąóąĄčüčé ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĮą░ ą┤ą▓čāčģ ąĮąŠą│ą░čģ (ą┐ąŠą╗ąĘąĄą╝ ą┐ąŠ ą┐ąŠą╗čā+ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą║ą╗ąĖčĆąĄąĮčüą░): ąÉą╗ą│ąŠčĆąĖčéą╝ čģąŠą┤čīą▒čŗ ąĖ ą┐ąŠą▓ąŠčĆąŠčéą░ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ č鹊ą╝, čćč鹊 čĆąŠą▒ąŠčé ą╝ąŠąČąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąŠč鹊čĆą▓ą░čéčī ąŠčé ąĘąĄą╝ą╗ąĖ čéčĆąĖ ąĮąŠą│ąĖ ąĖąĘ čłąĄčüčéąĖ. ąźąŠą┤čīą▒ą░ čĆąŠą▒ąŠčéą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĖąĘ čüąĄą▒čÅ ą┐ąŠąŠč湥čĆąĄą┤ąĮąŠąĄ ą┐ąĄčĆąĄą┤ą▓ąĖąČąĄąĮąĖąĄ «čéčĆąŠąĄą║» ąĮąŠą│. ą”ąĖčäčĆąŠą╣ 1 ąŠčéą╝ąĄč湥ąĮčŗ č鹥 ąĮąŠą│ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą╝ąĄčēą░čÄčéčüčÅ ą▓ ą┐ąĄčĆą▓čāčÄ ąŠč湥čĆąĄą┤čī, čåąĖčäčĆąŠą╣ 2 — ą▓ąŠ ą▓č鹊čĆčāčÄ ąŠč湥čĆąĄą┤čī. ą¦ą░čüčéčī Ōä¢4: ąöąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĀąŠą▒ąŠčéą░ čĆąĄčłąĄąĮąŠ ą▒čŗą╗ąŠ ąĮą░čāčćąĖčéčī čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ čü ą┐čāą╗čīčéą░ č湥čĆąĄąĘ Wi-Fi. ąöą╗čÅ čŹčéąĖčģ čåąĄą╗ąĄą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąŠą▒ąŠč鹊ą╝ ą▒čŗą╗ąŠ čĆą░ąĘą┤ąĄą╗ąĄąĮąŠ ąĮą░ ą┤ą▓ą░ ą▒ą╗ąŠą║ą░ — ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ (Arduino), ą▓ ąŠą▒čÅąĘą░ąĮąĮąŠčüčéąĖ ą║ąŠč鹊čĆąŠą│ąŠ ą▓čģąŠą┤ąĖą╗ąŠ čĆą░čüčüčćąĖčéčŗą▓ą░čéčī ą║ąĖąĮąĄą╝ą░čéąĖą║čā ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī čüąĄčĆą▓ą░ą╝ąĖ, ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ — Raspberry Pi čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ąĮą░ ąĮąĄą╝ ą×ąĪ Ubuntu Mate 16.04. ąØą░ čāą▒čāąĮč鹥 ą▒čŗą╗ą░ čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ROS — čĆąŠą▒ąŠč鹊č鹥čģąĮąĖč湥čüą║ą░čÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░, ą┐čĆąĄą┤ą╗ą░ą│ą░čÄčēą░čÅ ąŠą│čĆąŠą╝ąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓. ąōą╗ą░ą▓ąĮčŗą╝ ą┐ą╗čÄčüąŠą╝ ą▒čŗą╗ąŠ č鹊, čćč鹊 čāąČąĄ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ą╗čÅ ąŠą▒čēąĄąĮąĖčÅ ą░čĆą┤čāąĖąĮčŗ ąĖ ROS. ąÆą║čĆą░čéčåąĄ ąŠ čüčāčéąĖ ROS: ą▓ čŹč鹊ą╣ čüąĖčüč鹥ą╝ąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝, ąĖą╗ąĖ, ą║ą░ą║ ąĖčģ ąĮą░ąĘčŗą▓ą░čÄčé, čāąĘą╗ąŠą▓. ąÜą░ąČą┤čŗą╣ čāąĘąĄą╗ ą╝ąŠąČąĄčé ą┐čāą▒ą╗ąĖą║ąŠą▓ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčāčÄ č鹥ą╝čā (č鹊ą┐ąĖą║). ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠą│čāčé čüąŠą┤ąĄčƹȹ░čéčī čćč鹊 čāą│ąŠą┤ąĮąŠ — čģąŠčéčī čćąĖčüą╗ą░, čģąŠčéčī čüčéčĆąŠą║ąĖ, čģąŠčéčī ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ. ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗą╗ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠ bluetooth ą║ Raspberry Pi, ąĮąŠ čćą░čüč鹊čéą░ ą┐ąŠą╗čāčćą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ čü ą┤ąČąŠą╣čüčéąĖą║ą░ ą▒čŗą╗ą░ ą▓čüąĄą│ąŠ ą╗ąĖčłčī 5 ąōčå, č湥ą│ąŠ ą┐čĆąŠčüč鹊 ąĮąĄ čģą▓ą░čéą░ą╗ąŠ ą┤ą╗čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ą¤ąŠčŹč鹊ą╝čā ą┤ąČąŠą╣čüčéąĖą║ ą▒čŗą╗ ą┐čĆąĖą║ąŠčłą░č湥ąĮ ą║ ą¤ąÜ ą┐ąŠ USB. ąÜ čüą╗ąŠą▓čā, ąĮą░ ą¤ąÜ č鹊ąČąĄ Ubuntu 16.04 ąĖ ROS Kinetic. ąöą░ą╗ąĄąĄ ąĮą░ čĆąŠčāč鹥čĆąĄ ą▒čŗą╗ą░ čüąŠąĘą┤ą░ąĮą░ Wi-Fi čüąĄčéčī, č湥čĆąĄąĘ ą║ąŠč鹊čĆčāčÄ ą┐ąŠ ssh ą▒čŗą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ąŠą▒ą░ ą║ąŠą╝ą┐čīčÄč鹥čĆą░ (ą¤ąÜ ąĖ Raspberry Pi), ąĮą░ ą¤ąÜ ą▒čŗą╗ ąĘą░ą┐čāčēąĄąĮ ą╝ą░čüč鹥čĆ ROS, čāąĘąĄą╗ ą┤ąČąŠą╣čüčéąĖą║ą░ ąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą║ąŠą╝ą░ąĮą┤ ą┤ąČąŠą╣čüčéąĖą║ą░. ąØą░ Raspberry Pi ą▒čŗą╗ 菹║čüą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮ ą░ą┤čĆąĄčü ą╝ą░čüč鹥čĆą░ ROS ąĖ ąĘą░ą┐čāčēąĄąĮ čāąĘąĄą╗ čüą▓čÅąĘąĖ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé čü ą░čĆą┤čāąĖąĮąŠą╣, ąĮą░ ą║ąŠč鹊čĆąŠą╣, ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī, ą▒čŗą╗ąĖ ąĘą░ą┐čāčēąĄąĮčŗ čāąĘą╗čŗ ą┐čĆąĖąĄą╝ą░ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą║ąŠą╝ą░ąĮą┤ (ą¤ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮčüčéčĆčāą║čåąĖčÄ ą┐ąŠ ąĘą░ą┐čāčüą║čā ą┐čĆąĖą╗ąŠąČčā ą║ čüčéą░čéčīąĄ ą▓ą╝ąĄčüč鹥 čü čāąĘą╗ąŠą╝ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą║ąŠą╝ą░ąĮą┤ ą┤ąČąŠą╣čüčéąĖą║ą░). ąÆąŠčé čéą░ą║ ą▓čŗą│ą╗čÅą┤ąĖčé čüą┐ąĖčüąŠą║ čāąĘą╗ąŠą▓ ąĖąĘ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ rqt-graph:
ąØąĄą╝ąĮąŠą│ąŠ ąŠą▒ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ: ą╗ąĄą▓čŗą╝ ą┤ąČąŠą╣čüčéąĖą║ąŠą╝ ąĘą░ą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ ą│ąĄą║čüą░ą┐ąŠą┤ą░ (ą▓ą┐ąĄčĆąĄą┤-ąĮą░ąĘą░ą┤, ą▒ąŠą║ąŠą╝ (ąĄčēąĄ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą┤ąŠ ą║ąŠąĮčåą░)), ą┐čĆą░ą▓čŗą╝ ą┤ąČąŠą╣čüčéąĖą║ąŠą╝ čĆąŠą▒ąŠčé čĆą░ąĘą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą╝ąĄčüč鹥 ą▓ą╗ąĄą▓ąŠ ąĖ ą▓ą┐čĆą░ą▓ąŠ, ą║ąĮąŠą┐ą║ąĖ L2 ąĖ R2 ąŠčéą▓ąĄčćą░čÄčé ąĘą░ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą║ą╗ąĖčĆąĄąĮčüą░ čĆąŠą▒ąŠčéą░. ąÜčĆąĄčüčéąĖą║ąŠą╝ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠąĄ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖąĄ "ą┐ąŠąĘčŗ ą░čéą░ą║čāčÄčēąĄą│ąŠ čéą░čĆą░ąĮčéčāą╗ą░" (ąŠą▒ čŹč鹊ą╝ ą┤ą░ą╗ąĄąĄ). ąśč鹊ą│ąŠą▓ąŠąĄ ą▓ąĖą┤ąĄąŠ čĆą░ą▒ąŠčéčŗ čĆąŠą▒ąŠčéą░ (ąĮąĄ ą▓ąŠčłą╗ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą║ą╗ąĖčĆąĄąĮčüą░ ąĖ "ą┐ąŠąĘą░ ą░čéą░ą║čāčÄčēąĄą│ąŠ čéą░čĆą░ąĮčéčāą╗ą░":
"ą¤ąŠąĘą░ ą░čéą░ą║čāčÄčēąĄą│ąŠ čéą░čĆą░ąĮčéčāą╗ą░" - ą░ą╗ą│ąŠčĆąĖčéą╝, ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠč鹊čĆąŠą│ąŠ ą│ąĄą║čüą░ą┐ąŠą┤ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčé čüą▓ąŠą╣ ą▓ąĄčü ąĮą░ ąĘą░ą┤ąĮčÄčÄ čćą░čüčéčī ą║ąŠčĆą┐čāčüą░ ąĖ ą┐ąŠą┤ąĮąĖą╝ą░ąĄčé ą┐ąĄčĆąĄą┤ąĮąĖąĄ ą╗ą░ą┐čŗ ą░-ą╗čÅ ą░čéą░ą║čāčÄčēąĖą╣ čéą░čĆą░ąĮčéčāą╗:
ąÆąŠąŠą▒čēąĄ-č鹊 ąĖąĘąĮą░čćą░ą╗čīąĮąŠ čŹč鹊 ą┐ąĖčüą░ą╗ąŠčüčī ą┤ą╗čÅ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ąĮąĖčģ ą║ąŠąĮąĄčćąĮąŠčüč鹥ą╣ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖčģ ą▓ ą║ą░č湥čüčéą▓ąĄ ą╝ą░ąĮąĖą┐čāą╗čÅč鹊čĆą░. ąØąŠ čŹč鹊 ą┐ąŠą║ą░ čćč鹊 ą▓ ą┐ąĄčĆčüą┐ąĄą║čéąĖą▓ą░čģ, ą▒čŗčéčī ą╝ąŠąČąĄčé, ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ čüčéą░čéčīąĖ čü ą┤ąŠą┤ąĄą╗ą░ąĮąĮčŗą╝ ą░ą│čĆąĄą│ą░č鹊ą╝. ąÆąĖą┤ąĄąŠ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ "ą┐ąŠąĘčŗ čéą░čĆą░ąĮčéčāą╗ą░": ą¦ą░čüčéčī Ōä¢5: ąÆčŗą▓ąŠą┤čŗ ąĖ ą┐ąĄčĆčüą┐ąĄą║čéąĖą▓čŗ ąöą╗čÅ čüąĄą▒čÅ čģąŠčćčā ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą┐čĆąŠčåąĄčüčü čüąŠąĘą┤ą░ąĮąĖčÅ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ ą▒čŗą╗ ą┤ą╗čÅ ą╝ąĄąĮčÅ ą┐ąŠąĘąĮą░ą▓ą░č鹥ą╗čīąĮčŗą╝ ąĖ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčēąĖą╝, ąĮąŠ, ą▒ąĄąĘčāčüą╗ąŠą▓ąĮąŠ, ąĄčüčéčī ą║čāą┤ą░ čüčéčĆąĄą╝ąĖčéčīčüčÅ. ąóą░ą║, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▒čāą┤ąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ čéčĆą░ąĮčüą╗čÅčåąĖčÅ ą▓ąĖą┤ąĄąŠ čü čĆąŠą▒ąŠčéą░ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆ, ąĘą░čģą▓ą░čé ą┐ąĄčĆąĄą┤ąĮąĖą╝ąĖ ą╗ą░ą┐ą░ą╝ąĖ ą┐čĆąĄą┤ą╝ąĄč鹊ą▓, čģąŠą┤čīą▒ą░ ą┐ąŠ čüčéčāą┐ąĄąĮčīą║ą░ą╝. ąØą░ą┤ąĄčÄčüčī, čćč鹊 ą╝ąŠčÅ čüčéą░čéčīčÅ ą▒čāą┤ąĄčé ą┐ąŠą╗ąĄąĘąĮą░ č鹥ą╝, ą║č鹊 čĆąĄčłąĖčé čüąŠąĘą┤ą░čéčī ąĮąĄčćč鹊 ą┐ąŠčģąŠąČąĄąĄ.
P.S.ą¤čĆąŠčüčīą▒ą░ ąĮąĄ čüčāą┤ąĖčéčī čüą╗ąĖčłą║ąŠą╝ čüčéčĆąŠą│ąŠ -- čŹč鹊 ą╝ąŠčÅ ą┐ąĄčĆą▓ą░čÅ čüčéą░čéčīčÅ...
ążą░ą╣ą╗čŗ: ąÆčüąĄ ą▓ąŠą┐čĆąŠčüčŗ ą▓ ążąŠčĆčāą╝.
ąŁčéąĖ čüčéą░čéčīąĖ ą▓ą░ą╝ č鹊ąČąĄ ą╝ąŠą│čāčé ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ: |
|
||||||||||||
 |
 |


 |
||||
|
|
||||












ąĀą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüą░ą╣čéą░ ą┐čĆąŠą▓ąĄčĆąĄąĮą░ ą▓ ą▒čĆą░čāąĘąĄčĆą░čģ:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
ąÉą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ 菹║čĆą░ąĮą░ ąŠčé 1280čģ1024 ąĖ ą▓čŗčłąĄ.
ą¤čĆąĖ ą╝ąĄąĮčīčłąĖčģ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ ą┐čĆąŠą║čĆčāčéą║ąĖ.
ą¤ąŠ ą▓čüąĄą╝ ą▓ąŠą┐čĆąŠčüą░ą╝ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ąÜąŠčéčā: kot@radiokot.ru
©2005-2024