|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 180 ąĖąĘ 476
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9506 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
N1X

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 15, 2017 16:41:50 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
 |
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░ą╣ 03, 2012 17:03:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 188
ą×čéą║čāą┤ą░: ąōąŠą╝ąĄą╗čī, ąæąĄą╗ą░čĆčāčüčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
mial ą┐ąĖčüą░ą╗(ą░): ąØčā ą┐ąŠą╗ąĖą│ąŠąĮčŗ č鹊 ą▓ą░ą╝ ą▓čüąĄ čéą░ą║ąĖ ąĮčāąČąĮčŗ. ąÉ čĆą░ąĘą▒ąĖčĆą░čéčīčüčÅ čéą░ą╝ ąĮąĄč湥ą╝čā, čŹč鹊 ą▓čüčéčĆąŠąĄąĮąĮą░čÅ čäčāąĮą║čåąĖčÅ ą║ąŠąĮą▓ąĄčĆčéą░čåąĖąĖ ąĖąĘ čĆą░čüčéčĆą░ ą▓ ą▓ąĄą║č鹊čĆ ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé. ą» ą┐ąŠą┤čüą║ą░ąĘą░ą╗ ą║ą░ą║, čĆąĄčłą░čéčī ą▓ą░ą╝, ąĮą░ą┤ąŠ ąĮąĄ ąĮą░ą┤ąŠ... ąØčā čÅ ąĖ ąĖą╝ąĄą╗ ą▓ą▓ąĖą┤čā, čćč鹊 ą▒čāą┤čā čĆą░ąĘą▒ąĖčĆą░čéčīčüčÅ, ąĮąĄ ą┤ąŠ č鹊ą│ąŠ ą▒čŗą╗ąŠ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą║čā ąĘą░ą┐čāčēčā čāąČąĄ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓čüąĄ ą║čĆą░čüąĖą▓ąŠ ą┤ąĄą╗ą░čéčī  ąōą╗čÅą┤ąĖčłčī ąĮą░čćąĮčā ąĖ ą┐ą░ą╗ą╗ą░ą┤ąĖą╣ čüąŠą▒ąĖčĆą░čéčī...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
vilkin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 15, 2017 19:53:39 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
 |
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 14
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 23, 2010 11:54:59
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 69
ą×čéą║čāą┤ą░: ą£ąŠčüą║ą▓ą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Altium ą┐ąĖčüą░ą╗(ą░): ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ čĆą░ą▒ąŠčéą░ą╗ čü CAM350 ą░ č鹊ą╗čīą║ąŠ čü Wise software VisualCAM, ąĮąŠ ąŠąĮą░ ąĮąĄ ąĮčĆą░ą▓ąĖčéčīčüčÅ ą▓ąŠąŠą▒čēąĄ. ą¤ąŠą┤čüą║ą░ąČąĖ ą║ą░ą║ čü CAM350 ąĖąĘ ..... ąĪą║ą░čćą░ą╣č鹥 ąĖ ą┐ąŠčüą╝ąŠčéčĆąĖč鹥 ąÆąĪąĢ ą▓ąĖą┤ąĄąŠ čü čŹč鹊ą╣ čüčéčĆą░ąĮąĖčåčŗ http://laser-trafaret.ru/stencil_preparation.php ąŻą▓ąĄčĆąĄąĮ, čćč鹊 ą▓čüąĄ ą▓ąŠą┐čĆąŠčüčŗ ąŠčéą┐ą░ą┤čāčé. ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ, ą┤ą░ą╗čīčłąĄ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ čü CAM350 čüčéą░ąĮąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠčēąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
N1X
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 15, 2017 20:00:15 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░ą╣ 03, 2012 17:03:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 188
ą×čéą║čāą┤ą░: ąōąŠą╝ąĄą╗čī, ąæąĄą╗ą░čĆčāčüčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
vilkin, čüą▓ąŠčÄ ą┐ą╗ą░čéčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮąĄ čüąŠą▒ąĖčĆą░ą╗ąĖ ąĄčēąĄ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
vilkin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 15, 2017 20:12:04 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
|
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 14
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 23, 2010 11:54:59
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 69
ą×čéą║čāą┤ą░: ą£ąŠčüą║ą▓ą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
N1X ą┐ąĖčüą░ą╗(ą░): vilkin, čüą▓ąŠčÄ ą┐ą╗ą░čéčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮąĄ čüąŠą▒ąĖčĆą░ą╗ąĖ ąĄčēąĄ? ąĪą▓ąŠčÄ ą┐ą╗ą░čéčā čüąŠą▒čĆą░ą╗ ąĘą░ą┐čāčüčéąĖą╗, ąĖčüą┐čĆą░ą▓ąĖą▓ ą║ąŠčüčÅą║ąĖ... čéą░ą╝ ąĖčģ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ čéą░ą║... ąØąŠ ą▓čŗčłą╗ąŠ čéą░ą║, čćč鹊 čÅ ą┐ąŠą╝ąĄąĮčÅą╗ ą│ąŠčĆąŠą┤ ą┐čĆąŠąČąĖą▓ą░ąĮąĖčÅ, ąĮą░ą┤ąĄčÄčüčī, ąĮą░ą▓čüąĄą│ą┤ą░. ąÆ ąĖč鹊ą│ąĄ čāčüčéą░ąĮąŠą▓ą║ą░ ąŠčüčéą░ą╗ą░čüčī ą▓ ąØąŠą▓ąŠčüąĖą▒ąĖčĆčüą║ąĄ. ąóą░ą╝ ąĄčēąĄ ą┐ąŠ ą╝ąĄčģą░ąĮąĖą║ąĄ ąĮčāąČąĮąŠ ą┤ąŠą┤ąĄą╗čŗą▓ą░čéčī čüč鹊ą╗. ąÉ čéčāčé ąĮą░čćą░ą╗ ąŠą┐čÅčéčī čü ąĮčāą╗čÅ. ąĪą▓ąŠčÄ ą┐ą╗ą░čéčā ą┤ąĄą╗ą░čéčī ą┐ąŠą║ą░ čéčāčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮąĄčé. ą¤ąŠč鹊ą╝čā ą┤ą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüą░ ą┐čĆąĖąŠą▒čĆąĄą╗ ą┐ą╗ą░čéą║čā ąŠčé urez83 ą┤ą╗čÅ HLDI čü ą║čĆą░čüąĮąŠą╣ ą┐ą░čÅą╗čīąĮąŠą╣ ą╝ą░čüą║ąŠą╣, ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĮčāčÄ mial ąĮą░ čŹč鹊ą╝ ąČąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĖ. ąŚą░ąŠą┤ąĮąŠ ąŠąĘąĮą░ą║ąŠą╝ąĖą╗čüčÅ čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ ąĖ ą║ą░č湥čüčéą▓ąŠą╝. ąĪą┐ą░čÅą╗ ąĄčæ ąĖ ą┐ąŠą╗ąŠąČąĖą╗... ą┐ąŠą║ą░ ąĮąĄčéčā ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ąĮąĖą╝ą░čéčīčüčÅ ą┐ąŠą║čāą┐ą║ąŠą╣ ą┐čĆąĖąĮč鹥čĆą░ ąĖ ąĄą│ąŠ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĄą╣.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
N1X
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 15, 2017 20:34:55 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░ą╣ 03, 2012 17:03:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 188
ą×čéą║čāą┤ą░: ąōąŠą╝ąĄą╗čī, ąæąĄą╗ą░čĆčāčüčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą»čüąĮąŠ, ą░ ą║ą░ą╝ąĄčĆą░ ąĮą░ č鹊ą╣ ą┐ą╗ą░č鹥 č湥čĆąĄąĘ čģą░ą▒ ąČąĖą╗ą░ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
vilkin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 15, 2017 21:07:03 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
|
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 14
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 23, 2010 11:54:59
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 69
ą×čéą║čāą┤ą░: ą£ąŠčüą║ą▓ą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 1
|
ą¤čĆąŠ čĆą░ą▒ąŠčéčā ą║ą░ą╝ąĄčĆčŗ čü ą╝ąŠąĖą╝ čģą░ą▒ąŠą╝ čÅ ą┐ąĖčüą░ą╗ ą┐ąŠčüčé viewtopic.php?p=2729838#p2729838ąĪą┐ąŠą╣ą╗ąĄčĆą”ąĖčéą░čéą░: ąÜą░ą║ čÅ ą┐ąĖčüą░ą╗, ą┐ąŠčüčéą░ą▓ąĖą╗ ą╝ąĖą║čĆąŠčüčģąĄą╝čā čģą░ą▒ą░ TUSB2046B. ą¤čĆąĖ ą┐čĆąŠą▓ąĄčĆą║ąĄ čĆą░ą▒ąŠčéčŗ čü ą║ą░ą╝ąĄčĆąŠą╣ Logitech C270 ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĖą║ą░ą║ąĖčģ ąĮąĄčé.
ąĪ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą▓ąĄčĆčüąĖąĄą╣ čüąŠčäčéą░ ą▓čüąĄ čĆą░ą▒ąŠčéą░ąĄčé ąŠčéą╗ąĖčćąĮąŠ. ąØą░čüčéčĆąŠą╣ą║ąĖ ą▓ą║ą╗čÄčćąĖą╗ąĖčüčī ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ MJPG 640x480 30 ą║ą░ą┤čĆąŠą▓ ą▓ čüąĄą║čāąĮą┤čā. ąóąŠčĆą╝ąŠąĘąŠą▓ ąĮąĄ ąĘą░ą╝ąĄčéąĮąŠ.
ąÆč湥čĆą░ ą┐čĆąĖąĄčģą░ą╗ ą║ąĖčéą░ą╣čüą║ąĖą╣ 菹Įą┤ąŠčüą║ąŠą┐, ąĘą░ą║ą░ąĘą░ąĮąĮčŗą╣ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ. ąÆąŠčé čü ąĮąĖą╝, ą║ą░ą║ ą▓čŗčÅčüąĮąĖą╗ąŠčüčī, č湥čĆąĄąĘ ą╝ąŠčÄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā čģą░ą▒ą░ čāčüčéą░ąĮąŠą▓ą║ą░ čĆą░ą▒ąŠčéą░čéčī ąĮąĄ čģąŠč湥čé ą┐čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮąŠ...
ąĢčüą╗ąĖ čÅ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī 菹Įą┤ąŠčüą║ąŠą┐ ą▓ ą┐ąŠčĆčé ą║ąŠą╝ą┐čīčÄč鹥čĆą░ ąĖą╗ąĖ ą▓ čģą░ą▒ 2.0 ąĮą░ čüč鹊ą╗ąĄ, č鹊 ą▓čüąĄ čĆą░ą▒ąŠčéą░ąĄčé. ąÜą░čĆčéąĖąĮą║ą░ č湥čĆąĄąĘ HLDI ą┐ąŠą╗ąĮąŠčåąĄąĮąĮą░čÅ, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ 640x480 30 ą║ą░ą┤čĆąŠą▓, ą┤ąŠčüčéčāą┐ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖą╣ ąĮą░ ą▓čŗą▒ąŠčĆ.
ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ąČąĄ ą▓ čģą░ą▒ ąĮą░ čāčüčéą░ąĮąŠą▓ą║ąĄ, ą║ą░čĆčéąĖąĮą║ą░ čüąŠ čüą▒ąĖč鹊ą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĄą╣, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ą┤čĆąŠą▓ ą┐ą░ą┤ą░ąĄčé ą┤ąŠ 4, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čüą░ą╝ąŠ čüčéą░ą▓ąĖčéčüčÅ ą┐ąŠčćčéąĖ čüą░ą╝ąŠąĄ ą╝ąĄą╗ą║ąŠąĄ.
ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą▓čŗą▒čĆą░čéčī čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąŠą▒ąŠą╗čīčłąĄ ąĮąĄčé. ąøčÄą▒čŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ą░čĆčéąĖąĮčā ąĮąĄ ą╝ąĄąĮčÅčÄčé.
ąóą░ą║ čćč鹊 ąĮąĄ ą▓čüąĄ čéą░ą║ ą┐čĆąŠčüč鹊 čü čģą░ą▒ąŠą╝... ąŠą┤ąĮąŠąĘąĮą░čćąĮąŠ ąĮčāąČąĮąŠ ą┐čĆąŠą▒ąŠą▓ą░čéčī čüčéą░ą▓ąĖčéčī čģą░ą▒ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ 2.0 ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą╝ąĄčĆčā čüąŠ čüąČą░čéąĖąĄą╝ ą┐ąŠč鹊ą║ą░ MJPG.
ąöą░ą╗čīčłąĄ ą▒ąŠą╗čīčłąĄ...
ą×čéą┐ą░čÅą╗ čüą▓ąŠčÄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā TUSB2046B čü čāčüčéą░ąĮąŠą▓čēąĖą║ą░ ąĖ ą┐čĆąĖą┐ą░čÅą╗ ąĮą░ ą┐čĆąŠą▓ąŠą┤ąŠčćą║ą░čģ ą┐ą╗ą░čéčā ąŠčé čģą░ą▒ą░ ąĮą░ ą▒ą░ąĘąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ AU6254. ąÆ ąĖč鹊ą│ąĄ ąĮąŠčĆą╝ą░ą╗čīąĮą░čÅ ą║ą░čĆčéąĖąĮą║ą░ ą▒ąĄąĘ ąĖčüą║ą░ąČąĄąĮąĖą╣ čü ą║ą░ą╝ąĄčĆčŗ-菹Įą┤ąŠčüą║ąŠą┐ą░, ąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą║ą░čĆčéąĖąĮą║ą░ čĆą░ąĘ ą▓ čüąĄą║čāąĮą┤ 10... čéą░ą║ą░čÅ ą┐ąŠčłą░ą│ąŠą▓ą░čÅ čüčéčĆą░č鹥ą│ąĖčÅ. ąóąŠ ąĄčüčéčī čĆą░ą▒ąŠčéą░čéčī ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ. ą¤ąŠą┤ą║ą╗čÄčćą░čÄ č鹊čé ąČąĄ Logitech ą▓čüąĄ ą╗ąĄčéą░ąĄčé... ąØąĄ ą┐ąŠąĮčÅčéąĮąŠ.
ąŁąĮą┤ąŠčüą║ąŠą┐ čā ą╝ąĄąĮčÅ čĆą░ą▒ąŠčéą░ą╗ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ č湥čĆąĄąĘ čģą░ą▒ ąĮą░ čüč鹊ą╗ąĄ. ąöą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą║čĆąĖą▓ąĖąĘąĮčŗ čüą▓ąŠąĄą╣ čĆą░ąĘą▓ąŠą┤ą║ąĖ USB (ąŠą▒ ą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ ąĖą╝ą┐ąĄą┤ą░ąĮčüą░čģ ąĖ čĆąĄčćąĖ ąĮąĄčé, ąĮąŠ ą┐ąŠą┤ąŠą▒ąĖąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą┐ą░čĆ ą▓čĆąŠą┤ąĄ ąĄčüčéčī ) čĆąĄčłą░čÄ čĆą░ąĘąŠą▒čĆą░čéčī čŹč鹊čé čģą░ą▒ ąĖ ą┐čĆąĖčåąĄą┐ąĖčéčī ąĄą│ąŠ ąĮą░ ą┐čĆąŠą▓ąŠą┤ą░čģ ą▓ čāčüčéą░ąĮąŠą▓ą║čā. ąźą░ą▒ ąŠą║ą░ąĘą░ą╗ąŠčüčī čüą┤ąĄą╗ą░ąĮ ąĮą░ čćąĖą┐ąĄ GL850A ąŠ 64 ąĮąŠą│ą░čģ. ą¤ąĄčĆąĄą┐ą░ąĖą▓ą░čÄ ą┐ą╗ą░čéčŗ čģą░ą▒ąŠą▓. ąś ąŠ čćčāą┤ąŠ, ą▓čüąĄ ąĘą░ą▓ąĄą╗ąŠčüčī! ą¦ąĄčĆąĄąĘ GL850A (64pin) čĆą░ą▒ąŠčéą░ąĄčé ą▒ąĄąĘ č鹊čĆą╝ąŠąĘąŠą▓ ąĖ Logitech ąĖ ą║ąĖčéą░ą╣čüą║ąĖą╣ 菹Įą┤ąŠčüą║ąŠą┐!
ąæčāą┤čā ą┐ąĄčĆąĄą┤ąĄą╗čŗą▓ą░čéčī ą┐ą╗ą░čéčā čü čāč湥č鹊ą╝ ą▓čüąĄčģ ą╝ąŠąĖčģ ą║ąŠčüčÅą║ąŠą▓ ąĖ ą┐ąŠčüčéą░ą▓ą╗čÄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā čģą░ą▒ą░ GL850A (64pin). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą░ą▓č鹊čĆ ąŠą▒ąĮąŠą▓ą╗čÅą╗ čüą▓ąŠčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā. ąÜąĖčéą░ą╣čüą║ąĖą╣ 菹Įą┤ąŠčüą║ąŠą┐ čüčéą░ą╗ čüčéą░ą╗ ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ą▒ąĄąĘ čüčĆčŗą▓ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĮąŠ ą┐ąŠ-ą╗čÄą▒ąŠą╝čā, ąĮąĄ čüčĆą░ą▓ąĮąĖčéčī čü ą║ą░čĆčéąĖąĮą║ąŠą╣ ąĖ čüą║ąŠčĆąŠčüčéčīčÄ čĆą░ą▒ąŠčéčŗ Logitech C270. ąØąĄ ą▓čüąĄ čģą░ą▒čŗ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ ą┐ąŠą╗ąĄąĘąĮčŗ... ą¤ąŠ čäą░ą║čéčā, ą┐čĆąĖ ą║čĆąĖą▓ąŠą╣ ą║ąĖčéą░ą╣čüą║ąŠą╣ ą║ą░ą╝ąĄčĆąĄ ą┐ąŠą┤ą▒ąĖčĆą░čéčī ąĮčāąČąĮąŠ čāą┤ą░čćąĮčāčÄ čüą▓čÅąĘą║čā ą║ą░ą╝ąĄčĆą░-čģą░ą▒... ąØąŠ ąŠą┤ąĮą░ą║ąŠ, čü čģą░ą▒ąŠą╝ ąĮą░ GL850A ąŠ 64 ąĮąŠą│ą░čģ čĆą░ą▒ąŠčéą░ą╗ąŠ ą▓čüąĄ čćč鹊 čåąĄą┐ą╗čÅą╗... ąś ąĮą░ąŠą▒ąŠčĆąŠčé ą║ą░ą╝ąĄčĆą░ Logitech C270 čĆą░ą▒ąŠčéą░ąĄčé čüąŠ ą▓čüąĄą╝ąĖ čģą░ą▒ą░ą╝ąĖ, ą║ą░ą║-č鹊 čéą░ą║...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
N1X
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 15, 2017 22:39:28 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 70
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░ą╣ 03, 2012 17:03:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 188
ą×čéą║čāą┤ą░: ąōąŠą╝ąĄą╗čī, ąæąĄą╗ą░čĆčāčüčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą»čüąĮąŠ, čüą┐ą░čüąĖą▒ąŠ
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 09:25:25 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą£ąŠąČąĄčé ą▒čŗčéčī ą║ąŠą╗ą╗ąĄą║čéąĖą▓ąĮąŠ čüč乊čĆą╝čāą╗ąĖčĆąŠą▓ą░čéčī č鹥čģąĘą░ą┤ą░ąĮąĖąĄ ąĮą░ čāą┐čĆą░ą▓ą╗čÅčÄčēčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā ? 1) ą┐čĆąŠčüč鹊 ą║ąŠą┐ąĖą┐ą░čüčé čü ążąŠčĆčéą░ ąĮą░ ąĪ++ 2) ąÜą░ą║ąĖąĄ ą┤ąŠčĆą░ą▒ąŠčéą║ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗ: 2.1 ą║ąŠąĮčåąĄą▓ąĖą║ąĖ 2.2 ą░ą║čéąĖą▓ąĮąŠąĄ č鹊čĆą╝ąŠąČąĄąĮąĖąĄ 2.3 ą┐ąĄčĆąĄčüčćčæčé/ąŠčéčüčćčæčé ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┐ąŠ čüąĖą╝ą╝ąĄčéčĆąĖčćąĮąŠą╝čā čłčéąĖčäčéčā(č鹊čćą║ą░ čüąĖą╝ą╝ąĄčéčĆąĖąĖ) 2.4 ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą╗ą░ąĘąĄčĆąŠą╝ čćč鹊 č鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī (ąĮą░ ą║ąĖčéą░ą╣ąæą░ąĘą░čĆąĄ ą│ą┤ąĄ č鹊 ą▓ ą┤čĆčāąĖąĮąŠą╝ąŠą┤čāą╗čÅčģ ą▓ąĖą┤ąĄą╗ UV čüąĄąĮčüąŠčĆčŗ, ąŠąĮąĖ ą┐ąŠ ą╝ąŠąĄą╝čā čü ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╝ ą▓čŗčģąŠą┤ąŠą╝, ą╝ąŠąČąĄčé ą║ą░ą║čāčāčÄ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║čā ą╗ą░ąĘąĄčĆą░ ą▓ ą╗ąĄą┐ąĖčéčī, ąĮąĄ ąĮą░ ą┐ąŠą╗čŗąĮčāčÄ ą╝ąŠčēčī, ą░ čüą║ą░ąČąĄą╝ ą▓ 10% ąĮą░ą║ą░ą╗ą░ ąĖ ąŠą┐čĆąĄą┤ąĖą╗čÅčéčī ą┤ąŠą┐čāčüčéąĖą╝ čüą╝ąĄčēąĄąĮąĖąĄ ą║ą░čĆąĄčéą║ąĖ, ą┐ąĄčĆąĄą╗čæčé ą║ą░ą║ąŠą╣ ąĮąĖą▒čāą┤čī, č乊ą║čāčüąĖčĆąŠą▓ą║čā ąĖą╗ąĖ ąĄčēčæ čćč鹊) 2.5 ąÜąŠčĆčĆąĄą║čåąĖčÅ ą│ąĄčĆą▒ąĄčĆą░ ą┐ąŠ čĆąĄą┐ąĄčĆąĮčŗą╝ ą╝ąĄčéą║ą░ą╝ ąĮą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥(ą║ą░ą╝ąĄčĆą░ ąĮą░ ą║ą░čĆąĄčéą║ąĄ ąĄą┤ąĄčé ą║ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄą╝ąŠą╝čā ą╝ąĄčüčéčā čĆąĄą┐ąĄčĆąĮąŠą╣ č鹊čćą║ąĄ, ą║čāčĆčüąŠčĆąŠą╝ čéčŗą║ą░ąĄą╝ ą▓ čĆąĄą┐ąĄčĆąĮčāčÄ č鹊čćą║čā ąĮą░ 菹║čĆą░ąĮąĄ, ąŠčéą╝ąĄčćą░ąĄčéčüčÅ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ ąĖ ąĄčæ čüą╝ąĄčēąĄąĮąĖąĄ ąŠčé ą┐čĆąŠąĄą║čéą░). ą×čéą╝ąĄčćą░ąĄą╝ N č鹊č湥ą║(ąĮąĄ ą╝ąĄąĮąĄąĄ 4čģ, ą┤ąŠą┐čāčüčéąĖą╝ 5-čÅ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ ą┤ą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠčüčéąĖ čĆą░čüčćčæčéą░ ąĖčüą║ą░ąČąĄąĮąĖčÅ/ą▓čĆą░čēąĄąĮąĖčÅ(ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ą╗ą░čéčŗ ąĮą░ čüč鹊ą╗ąĄ) ąĖ ąŠčłąĖą▒ą║ąĖ čüą▓ąĄčĆą╗ąŠą▓ą║ąĖ(ą╝ą░čüčłčéą░ą▒čŗ ąŠčüąĄą╣ ąĮąĄ ąĖą┤ąĄą░ą╗čīąĮčŗ ą▓ ą¦ą¤ąŻ ąĖą╗ąĖ čĆčāčćąĮąŠą╣ čüą▓ąĄčĆą╗ąĖą╗ą║ąĄ)). (ą┐ąŠ ą┐čĆąŠčüčīą▒ąĄ mial) 2.ąĮą┤čåą░čéčī 3 ąøąĄčéą░ č鹊ą╝čā ąĮą░ąĘą░ą┤ čĆąŠą┤ąĖą╗ą░čüčī ą╝čŗčüą╗čī viewtopic.php?p=1931374#p1931374, ą║ąŠč鹊čĆą░čÅ(ą▒čŗą╗ą░ ą┐ąŠčģąŠčĆąŠąĮąĄąĮą░ ą║ą░ą║ ąŠą▒čŗčćąĮąŠ, ąĮąŠ ąŠčé čŹč鹊ą│ąŠ ąĮąĄ ą╗ąĖčłąĄąĮą░ ą┐ąŠč鹥ąĮčåąĖą░ą╗ą░) ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą╝ąĮąĄ ąĮąĄ ą┤ą░čæčé čüą┐ą░čéčī. ą┤ą╗čÅ ąĄčæ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĮčāąČąĮąŠ čĆą░ąĘ ąŠą▒čĆą░čéčīčüčÅ ą╝ąĮąĄ čü 3ą┤ ą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą┤ąĄčéą░ą╗ąĄą╣ ąĖ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą▓ ąČąĄą╗ąĄąĘąĄ, ą┐ąŠčŹč鹊ą╝čā ą▓ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╝ ą¤ą× ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ čü ą┐ąŠą╗ąĖą│ąŠąĮą░ą╗čīąĮčŗą╝ ąĘąĄčĆą║ą░ą╗ąŠą╝, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé čĆąĖčüąŠą▓ą░čéčī ąŠčé 1ą╣ ą┤ąŠ 30 čüčéčĆąŠą║ čüčĆą░ąĘčā(č鹊 ąĄčüčéčī čüč鹊ą╗ą▒čŗ č鹊č湥ą║ ą▓ čüčéčĆąŠą║ąĄ), ą┐čĆąĖ čŹč鹊ą╝ ą▓ą╝ąĄčüč鹊 ą║ąŠą╗ą╗ąĄą║č鹊čĆąĮąĖą║ą░ ą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ą║ą░čĆąĄčéą║ąŠą╣ ą▒čāą┤ąĄčé čłą░ą│ąŠą▓ąĖą║ čü 菹Įą║ąŠą┤ąĄčĆąŠą╝ ąĮą░ ą▓ą░ą╗čā, ą┐ąŠą║ą░ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄą╗ 700 č鹊č湥ą║ ąĮą░ ąŠą▒ąŠčĆąŠčé. ąÆ ą│ąŠą╗ąŠą▓ą║ąĄ ą▒čāą┤ąĄčé čüą║ąŠčĆąĄąĄ čüą▓ąŠą╣ ą£ąÜ, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ą▒ą╗ąŠą║ č鹊č湥ą║ ąĮą░ čüč鹊ą╗ą▒. ąśą┤ąĄčÄ ą▒čāą┤čā čĆąĄą░ą╗ąĖąĘąŠą▓čŗą▓ą░čéčī ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ, ą┐čāčüčéčī ą┤ą░ąČąĄ ą┐čĆąĖą┤čæčéčüčÅ ą┐ąĖčüą░čéčī čüą▓ąŠčæ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą¤ą×, ąĮąŠ ąĄčüą╗ąĖ ąĄčüčéčī č湥ą╗ąŠą▓ąĄą║ ą║ąŠč鹊čĆčŗą╣ čüąŠą│ą╗ą░čüąĄąĮ ą┐ąĄčĆąĄą┐ąĖčüą░čéčī čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą¤ą× ąĮą░ ąĪ++, č鹊 ą┤ą░ąĮąĮčŗą╣ ą▓ąŠą┐čĆąŠčü ą║čĆą░čéąĮąŠ čāą┐čĆąŠčēą░ąĄčéčüčÅ. (ąĘą░č湥ą╝ čÅ čŹč鹊: čćč鹊 ą▒čŗ č鹊čé ą║č鹊 ą▒čāą┤ąĄčé ą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī ąĄčüą╗ąĖ ąŠą▒ą╗ą░ą┤ą░ąĄčé ą┤ą░ąĮąĮčŗą╝ ą▓ąŠą┐čĆąŠčüąŠą╝ čüčĆą░ąĘčā ąĘą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĮąĄ ą┐ąŠčüčéčĆąŠčćąĮąŠą╣ čéčĆą░ąĮčüą┐ąŠčĆčéąĖčĆąŠą▓ą║ąĖ č鹊č湥ą║ ą▓ ą£ąÜ, ą░ ą┐ąŠą▒ą╗ąŠčćąĮąŠą╣ ąĮą░ čüčéčĆąŠą║čā, č鹊 ąĄčüčéčī ąĘą░ 1 ą┐čĆąŠčģąŠą┤ ą║ą░čĆąĄčéą║ąĖ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ąŠčé 1 ą┤ąŠ 100 č鹊č湥ą║, čÅ ą┤čāą╝ą░čÄ ą┤ą░ąĮąĮąŠą│ąŠ ą╝ą░ą║čüąĖą╝čāą╝ą░ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ čéčĆąĄą▒čāąĄą╝ąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ) ą░ ą╝ąŠąČąĮąŠ ąĄčēčæ ą┐čĆąŠčēąĄ čüą┤ąĄą╗ą░čéčī, ą│ąŠą╗ąŠą▓ą░ ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą║ąŠčĆąĄčéą║ąŠą╣, č鹊ąĄčüčéčī ą▓ ą│ąŠą╗ąŠą▓ąĄ ą▒čāą┤ąĄčé DRAM ąĮą░ 菹Įą┤čåą░čéčī ą£ąæ ą▓ ą│ąŠą╗ąŠą▓čā ą┐čĆąĖčłąĄą╗ ą▒ą╗ąŠą║ čüą║ą░ąČąĄą╝ 1 ą┐ąŠą╗ąŠčüą░(20000 čłąĖąĮąĖčŗ*20 ą▓čŗčüąŠčéčŗ) č鹊č湥ą║, ą│ąŠą╗ąŠą▓ą░ ą│ąŠą▓ąŠčĆąĖčé ą║ą░čĆąĄčéą║ąĄ ą║ą░ą║ ą┤ą▓ąĖą│ą░čéčīčüčÅ, č鹊 ąĄčüčéčī čüą╝ąĄčēą░ąĄčé čüąĄą▒čÅ ąĖ ą┐čĆąŠčĆąĖčüąŠą▓čŗą▓ą░ąĄčé čüč鹊ą╗ą▒ąĄčå ą┐ąŠą╗ąŠčüčŗ, ą┤ą░ą╗čīčłąĄ čÅ ą┤čāą╝ą░čÄ čÅčüąĮąŠ, ą┐čĆąŠčłą╗ąĖ ą┐ąŠą╗ąŠčüčā, ą│čĆčāąĘąĖą╝ ąŠč湥čĆąĄą┤ąĮąŠą╣ ą▒ą╗ąŠą║ ą┐ąŠą╗ąŠčüčŗ, ą│ąŠą╗ąŠą▓ą░ ą┐ąŠąĄčģą░ą╗ą░
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī psychos ą¦čé ą╝ą░čĆ 16, 2017 16:51:46, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
irf540n
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 11:26:58 |
|
ąÜą░čĆą╝ą░: -3
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -17
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 16, 2015 07:12:26
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 19
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą×ąæą»ąŚąÉąóąĢąøą¼ąØą×
"2.3 ą┐ąĄčĆąĄčüčćčæčé/ąŠčéčüčćčæčé ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┐ąŠ čüąĖą╝ą╝ąĄčéčĆąĖčćąĮąŠą╝čā čłčéąĖčäčéčā(č鹊čćą║ą░ čüąĖą╝ą╝ąĄčéčĆąĖąĖ)"
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
compar
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 11:29:14 |
|
ąÜą░čĆą╝ą░: -8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -16
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąŠą║čé 18, 2016 08:07:37
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą▒ąĄąĘ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ąĖą┤ąĄą╣ąĮąŠą│ąŠ ą▓ą┤ąŠčģąĮąŠą▓ąĖč鹥ą╗čÅ, ą░ čüą░ą╝ąŠąĄ ą│ą╗ą░ą▓ąĮąŠąĄ, čĆąĄą░ą╗ąĖąĘą░č鹊čĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ-ą░ą┐ą░čĆą░čéąĮąŠą╣ čćą░čüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ AlphaCrow , č鹊ą┐ąĖą║ ą┐čĆąĄą▓čĆą░čéąĖą╗čüčÅ ą▓ąŠ čäą╗čāą┤ąĖą╗čīąĮčÄ ą│ąŠčĆąĄ ą┐ąŠą▓č鹊čĆąĖč鹥ą╗ąĄą╣, čüčéčĆąĄą╝čÅčēąĖą╣čüčÅ ąĘą░čüą▓ąĄčéąĖčéčīčüčÅ čüą▓ąŠąĖą╝ąĖ ą┐ąŠą┤ąĄą╗ą║ą░ą╝ąĖ-ąĮąĄą┤ąŠą┤ąĄą╗ą║ą░ą╝ąĖ. ąĪčéčĆąĄą╝ą╗ąĄąĮąĖąĄ ą┐čĆąĖčćąĖčüą╗ąĖčéčī čüąĄą▒čÅ ą║ ŌĆ£ą│čāčĆčāŌĆØ ąĖ ŌĆ£čüą┐ąĄčåąĖą░ą╗ąĖčüčéą░ą╝-ą┐čĆąŠč乥čüčüąĖąŠąĮą░ą╗ą░ą╝ŌĆØ ąĮą░ą┐čĆąŠčćčī ąŠčéą║ą╗čÄčćą░ąĄčé ąĖčģ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┤čāą╝ą░čéčī ąĖ ą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą│ąŠą╗ąŠą▓ąŠą╣. ąÆąĄčüčī ąĖčģ čüą╝čŗčüą╗ čüčāčēąĄčüčéą▓ąŠą▓ą░ąĮąĖčÅ ąĮą░ č乊čĆčāą╝ąĄ čüą▓ąŠą┤ąĖčéčüčÅ ą║ čäą╗čāą┤čā, ŌĆ£čĆąĄą╣čéąĖąĮą│čā čüąŠąŠą▒čēąĄąĮąĖčÅ ŌĆ£ ąĖ ŌĆ£ą║ą░čĆą╝ąĄŌĆØ ąĮą░ ą║ąŠč鹊čĆčāčÄ ąŠąĮąĖ ą▓ąĖą┤ą░čéčī ą╝ąŠą╗čÅčéčüčÅ. ąØąĄ ą▓ąĖąČčā čüą╝čŗčüą╗ą░ ą▓čüčéčāą┐ą░čéčī ą▓ ą┐ąŠą╗ąĄą╝ąĖą║čā čü čéą░ą║ąĖą╝ąĖ , čéą░ą║ ą║ą░ą║ ą┐čĆąĖą▓ąĄčƹȹĄąĮąĄčå ą┐ąŠčüą╗ąŠą▓ąĖčåčŗ " ą┤čāčĆą░ą║ą░ čāčćąĖčéčī - č鹊ą╗čīą║ąŠ ą┐ąŠčĆčéąĖčéčī". ąŻ ą╝ąĄąĮčÅ ą╗ąĖčćąĮąŠ - čāčüčéčĆąŠą╣čüčéą▓ąŠ čüąŠą▒čĆą░ąĮąĮąŠ , čāčüą┐ąĄčłąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé čāąČąĄ ą┐ąŠą╗ ą│ąŠą┤ą░, ŌĆ£ą┐čĆąŠą▒ą╗ąĄą╝ŌĆØ čü ą║ąŠč鹊čĆčŗą╝ąĖ čéčāčé ą╝ąĮąŠą│ąĖąĄ čüčéą░ą╗ą║ąĖą▓ą░čÄčéčüčÅ ąĮąĄ ąĖą╝ąĄčÄ. ąÜąŠąĮčüčéčĆčāą║čåąĖčÅ čüąŠą▒čĆą░ąĮą░ čü ą┐ąĄčĆą▓ąŠą│ąŠ čĆą░ąĘą░ ąĖ ąĮąĖ ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ąĘą░ ą▓čüąĄ ą▓čĆąĄą╝čÅ (čüą▒ąŠčĆą║ą░, ąĮą░ą╗ą░ą┤ą║ą░, 菹║čüą┐ą╗čāą░čéą░čåąĖčÅ) ąĮąĄ ą┐ąŠčüčéčĆą░ą┤ą░ą╗. ąÆčŗčĆą░ąČą░čÄ ąĄčēčæ čĆą░ąĘ ąŠą│čĆąŠą╝ąĮčāčÄ ą┐čĆąĖąĘąĮą░č鹥ą╗čīąĮąŠčüčéčī ąĖ čāą▓ą░ąČąĄąĮąĖąĄ AlphaCrow ąĘą░ ąĄą│ąŠ ą┐čāą▒ą╗ąĖą║ą░čåąĖčÄ ą▓ ąŠčéą║čĆčŗč鹊ą╝ ą┤ąŠčüčéčāą┐ąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĄą│ąŠ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ. ą¢ą░ą╗čī, čćč鹊 ąŠąĮ ąĘą░ą▒čĆąŠčüąĖą╗ ą┤ą░ąĮąĮčŗą╣ ą┐čĆąŠąĄą║čé, ąĮąĄ ŌĆ£ą┐čĆąĖč湥čüą░ą▓ŌĆØ ąĄą│ąŠ. ąóą░ą║ąČąĄ čüą║ą░ąĘą░čéčī čüą┐ą░čüąĖą▒ąŠ Seriyvolk ąĘą░ čüčéčĆąĄą╝ą╗ąĄąĮąĖąĄ čāą╗čāčćčłąĖčéčī ąĖ čāąĮąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ . ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ąĄą│ąŠ ą┐čĆąĖąĮčåąĖą┐ ą│ąŠč鹊ą▓čŗčģ ą╝ąŠą┤čāą╗ąĄą╣ ąĖ čüčģąĄą╝čā ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ą░čĆąĄčéą║ąĖ čü ąĮąĄą▒ąŠą╗čīčłąĖą╝ąĖ čüą▓ąŠąĖą╝ąĖ ą┤ąŠčĆą░ą▒ąŠčéą║ą░ą╝ąĖ. ąś ą┐čĆąĖąĘąĮą░č鹥ą╗čīąĮąŠčüčéčī mial ąĘą░ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ čāčüčéčĆąŠą╣čüčéą▓ą░. ą×čüčéą░ą╗čīąĮčŗą╝ ą┐ąŠą▓č鹊čĆąĖč鹥ą╗čÅą╝ ŌĆō čāčüą┐ąĄčłąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖ ą╝ąĖąĮąĖą╝čāą╝ ąŠčłąĖą▒ąŠą║. ąÉą┤ąĄą┐čéą░ą╝-ą┤ąĖą╗ąĄčéą░ąĮčéą░ą╝ - čüčćą░čüčéčīčÅ ąŠčé ą║ą░čĆą╝čŗ ąĖ čĆąĄą╣čéąĖąĮą│ąŠą▓ ąŻ ą╝ąĄąĮčÅ ą▓čüąĄ , čüą╝ąĄčÄ ąŠčéą║ą╗ą░ąĮčÅčéčīčüčÅ 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 13:26:43 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Altium ą┐ąĖčüą░ą╗(ą░): psychos ą┤ąŠčĆąŠą│ąŠą╣, ą┐ąĖčüą░ą╗ ą▓ ą╗ąĖčćą║čā ąĮąŠ čéčīą╣ ą╝ąĄąĮčÅ ąŠą┐ąĄčĆąĄą┤ąĖą╗. ą£ąĄčĆąĖ čüčéčĆąŠą│ąŠ ą┐ąŠ čüčģąĄą╝čā ąŠčéčüčÄą┤ą░: viewtopic.php?p=3035969#p3035969 ąĖ ą║ąŠąĮąĄčćąĮąŠ ą▒ą░čéą░čĆąĄčÅ ą╝ąŠąČąĮąŠ ą┐ąŠčüčéą░ą▓ą╗čÅčéčī 3.6V ąĖą╗ąĖ ą┤ą░ąČąĄ 4.5V, čÅ ąĄčēąĄ ąĮąĄ ąĘąĮą░čÄ ą║ą░ą║ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą┐čĆąŠą▒ąĖą▓ą░ ą▓ č乊č鹊ą┤ąĖąŠą┤ą░, ąĮąŠ ą┤čāą╝ą░čÄ ą┤ąŠ 5V ą▒čāą┤ąĄčé ą┤ąĄčƹȹ░čéčī ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝. .... ąÆ č鹊čćą║ą░ ąÉ (ąŠą▒čēąĖą╣ ą║ą░č鹊ą┤) ą▓ą║ą╗čÄčćą░ą╣ ą║čĆą░čüąĮąŠą╣ čēčāą┐ ą╝čāą╗čīčéąĖą╝ąĄčéčĆą░, ą░ ą▓ č鹊čćą║ą░ ąÆ - č湥čĆąĮčīą╣. ą¤ąĄčĆąĄą┤čüčéą░ą▓čī čüąĄą▒ąĄ čćč鹊ą▒ č乊č鹊ą┤ąĖąŠą┤ ą▒čāą┤ąĄčéčī ąĖą│čĆą░čéčī čĆąŠą╗čī ą┐čĆąŠčüč鹊ą│ąŠ č乊č鹊čĆąĄąĘąĖčüč鹊čĆą░ ąĖ ą▒čāą┤ąĄčé ą┐čĆąŠą┐čāčüą║ą░čéčī č鹊ą║ ą┐čĆąĖ ąŠčüą▓ąĄčēąĄąĮąĖąĄą╝. ... ąĀąĄąĘąĖčüč鹊čĆ ą┐ąŠ čüčģąĄą╝ąĄ 100ąÜ, ąĮąŠ ą╝ąŠąČąĮąŠ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ąĖ čü 200-500ąÜ čćč鹊ą▒ ą╝ąŠąČąĮąŠ ąŠčåąĄąĮąĖčéčī ą║ą░ą║ ąĖąĘą╝ąĄąĮąĖčéčīčüčÅ ąĮą░ą║ą╗ąŠąĮ ą│čĆą░čäąĖą║ąĖ (č鹊ąĄčüčé čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ąĄč鹊ą│ąŠ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą│ąŠ čüą┐ąŠčüąŠą▒ą░). ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ ąĖąĘą╝ąĄčĆčÅą╗ą║ąĖ: ąĪą┐ąŠą╣ą╗ąĄčĆ ąĀą░ąĘčĆčÅąČą░čÄ ąŠą▒čüčéą░ąĮąŠą▓ą║čā ą┤ąŠą╗ą░ąČąĖą▓ą░ąĮąĖąĄą╝  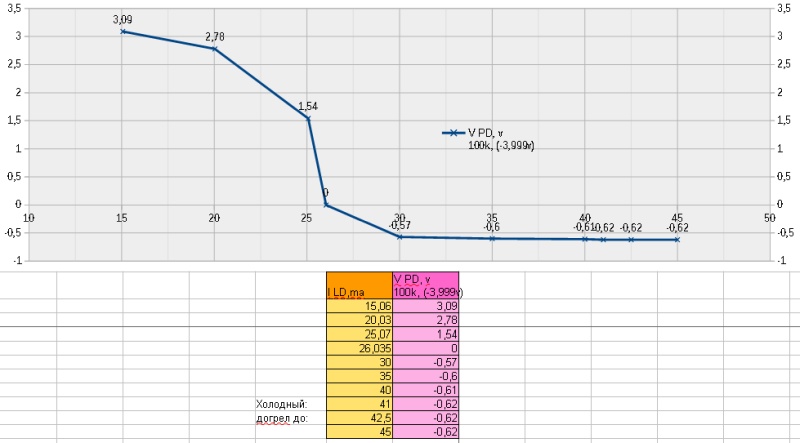 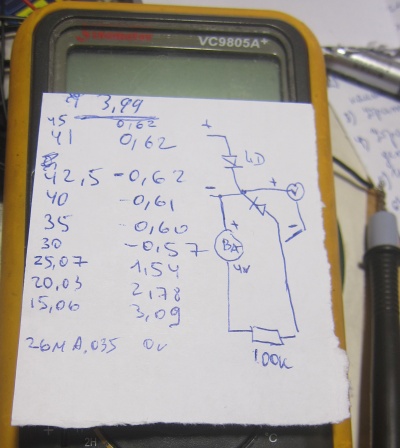  ąĮąĄčé, ąŠąĮąŠ čéčāčé čÅčüąĮąŠ čćč鹊 ą┐ąŠčüą╗ąĄ 35 mA ą▓čüčÅ ąŠčüčéą░ą╗čīąĮą░čÅ(ą╗ąĖčłąĮčÅčÅ) 菹ĮąĄčĆą│ąĖčÅ čāčģąŠą┤ąĖčé ą▓ ąŠč鹊ą┐ą╗ąĄąĮąĖąĄ... ąĮąŠ ą╗ąĖąĮąĄą╣ąĮąŠčüčéąĖ čćč鹊 č鹊 čÅ čéčāčé ąĮąĄ ą▓ąĖąČčā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 15:01:58 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 8
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
ą«ąĘą░čÄ čāčüčéą░ąĮąŠą▓ą║čā čāąČąĄ ą┐ąŠą╗č鹊čĆą░ ą│ąŠą┤ą░. ą£ąĄąĮčÅ ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ ą▓čüąĄ čāčüčéčĆą░ąĖą▓ą░ąĄčé. ąĢčüčéčī čéą░ą║ą░čÅ čģąŠč鹥ą╗ą║ą░ ąĖą╗ąĖ ą╝ąĄčćčéą░, ąĮą░ąĘčŗą▓ą░ą╣č鹥 ą║ą░ą║ čģąŠčéąĖč鹥. ąźąŠč鹥ą╗ąŠčüčī ą▒čŗ čćč鹊 ą▒čŗ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą▒čŗą╗ą░ ą║ąŠčĆčĆąĄą║čåąĖčÅ ą│ąĄčĆą▒ąĄčĆą░ ą┐ąŠ 4 č鹊čćą║ą░ą╝. ą» čāąČąĄ ą║ą░ą║ č鹊 ą┐ąĖčüą░ą╗ ąŠą▒ čŹč鹊ą╝ ą▓ ąĮą░čćą░ą╗ąĄ č鹥ą╝čŗ. ąóąŠ ąĄčüčéčī, ą┐ąŠą╗ąŠąČąĖą╗ąĖ ą┐ą╗ą░čéčā ąĮą░ čüč鹊ą╗, ą┐čĆąŠčłą╗ąĖčüčī ą┐ąŠ 4 čĆąĄą┐ąĄčĆą░ą╝ čü čāą│ą╗ąŠą▓ ą┐ą╗ą░čéčŗ. ąōąĄčĆą▒ąĄčĆ ą░ą▓č鹊ą╝ą░č鹊ą╝ čü ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░ą╗čüčÅ ą┐ąŠą┤ ą┐ą╗ą░čéčā. ąśą╝ąĄąĄčéčüčÅ ą▓ą▓ąĖą┤čā ąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą┐ą╗ą░čéčŗ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ąĖ čĆą░ąĘą╝ąĄčĆčŗ. ą¤ąŠ čéąĖą┐čā ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ąĮą░ ą▓ąĘčĆąŠčüą╗čŗčģ čāčüčéą░ąĮąŠą▓ą║ą░čģ ą╗ą░ąĘąĄčĆąĮąŠą│ąŠ 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ PCB. ąÆąĖą┤ąĄąŠ čéčāčé čāąČąĄ ą▓čŗą║ą╗ą░ą┤čŗą▓ą░ą╗ąŠčüčī. ąÆąŠčé čŹč鹊 ą▒čŗą╗ą░ ą▒čŗ čĆąĄą░ą╗čīąĮą░čÅ ą▒ąŠą╝ą▒ą░. ąśą┤ąĄą░ą╗čīąĮąŠąĄ čüąŠą▓ą╝ąĄčēąĄąĮąĖąĄ, ąŠčéą┐ą░ą┤ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ č鹊čćąĮąŠą╣ čÄčüčéąĖčĆąŠą▓ą║ąĄ ą┐ą╗ą░čéčŗ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąŠčüąĖ ą║ą░čĆąĄčéą║ąĖ. ąöą░ ą┐ą╗čÄčłąĄą║ ą╝ąĮąŠą│ąŠ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ. ąÉ ą║ąŠąĮčåąĄą▓ąĖą║ąĖ, ą┤ą░ ą▓čüąĄ čéą░ą║ąŠąĄ, čŹč鹊 ą╝ąĖčłčāčĆą░...
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
arkhnchul
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 15:33:09 |
|
ąÜą░čĆą╝ą░: 38
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 618
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ą░ą┐čĆ 06, 2015 11:01:53
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3092
ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, čāčäą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĘą░č湥ą╝ ą┐ąŠ č湥čéčŗčĆąĄą╝? ą┤ą╗čÅ ą┐čĆąĖą▓čÅąĘą║ąĖ čü ą▓čĆą░čēąĄąĮąĖąĄą╝ ą║ąŠąŠčĆą┤ąĖąĮą░čéąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą▓čāčģ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 15:35:56 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąÉ čĆą░ąĘą╝ąĄčĆ ą┐ąŠ Y?
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī mial ą¤čé ą╝ą░čĆ 17, 2017 11:50:28, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 2 čĆą░ąĘ(ą░).
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
arkhnchul
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 15:40:15 |
|
ąÜą░čĆą╝ą░: 38
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 618
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ą░ą┐čĆ 06, 2015 11:01:53
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3092
ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, čāčäą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą░ čĆą░ąĘą╝ąĄčĆ čĆą░ąĘą▓ąĄ ąĘą░čĆą░ąĮąĄąĄ ąĮąĄąĖąĘą▓ąĄčüč鹥ąĮ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 15:45:20 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 8
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąśąĘą▓ąĄčüč鹥ąĮ, čÅ ąĖą╝ąĄčÄ ą▓ą▓ąĖą┤čā ą║ ą┐čĆąĖą▓čÅąĘą║ąĄ ą║ č鹥ą║čāčēąĖą╝ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ čĆąĄą┐ąĄčĆąŠą▓, ą╝ąŠąČąĄčé čéą░ą╝ ąĮą░ ą┐ą░čĆčā ą┤ąĄčüčÅč鹊ą║ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ, ą▒čŗą▓ą░ąĄčé čéą░ą║ąŠąĄ. ą¤ą╗ą░čéą░ čüą▓ąĄčĆą╗ąĖą╗ą░čüčī ą┐čĆąĖ ąŠą┤ąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ, 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ą╗ą░čüčī ą┐čĆąĖ ą┤čĆčāą│ąŠą╣, ąĖ ąĮą░ ą▒ąŠą╗čīčłąĖčģ čĆą░ąĘą╝ąĄčĆą░čģ čāą╗ąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒ąŠą╗čīčłąŠą╣. ą¤čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖą┤ąĄą░ą╗čīąĮąŠą│ąŠ čüąŠą▓ą╝ąĄčēąĄąĮąĖčÅ. ąÉ čéą░ą║ ą▓čüąĄ ą▒čŗ ą░ą▓č鹊ą╝ą░č鹊ą╝ ą┤ąĄą╗ą░ą╗ąŠčüčī ą┐ąŠą┤ ą║ąŠąĮą║čĆąĄčéąĮčāčÄ ą┐ą╗ą░čéčā. ąØčā ąĮąĄ ąĘąĮą░čÄ ą║ą░ą║ ąĄčēąĄ ąŠą▒čŖčÅčüąĮąĖčéčī. ą¤ąŠ 2 č鹊čćą║ą░ą╝ ą╝čŗ čü ą║ąŠą╝ą┐ąĄąĮčüąĖčĆčāąĄą╝ č鹊ą╗čīą║ąŠ ą▓čĆą░čēąĄąĮąĖąĄ ą┐ą╗ą░čéčŗ. ą¤ąŠ 4 ą┐čĆąĖą▓čÅąČąĄą╝ ą│ąĄčĆą▒ąĄčĆ ą║ąŠ ą▓čüąĄą╣ ą┐ą╗ą░č鹥. ą¤ąŠčüą╝ąŠčéčĆąĖč鹥 ą▓ąĖą┤ąĄąŠ ą┐ąŠ ą╗ą░ąĘąĄčĆąĮčŗą╝ čāčüčéą░ąĮąŠą▓ą║ą░ą╝ ą┤ą╗čÅ PCB, ąŠąĮąĖ ą┤ą░ąČąĄ ą┤ąĖą░ą│ąŠąĮą░ą╗čīąĮčŗąĄ ąĖčüą║ą░ąČąĄąĮąĖčÅ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆčāčÄčé čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
| ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī AlekseyEnergo ą¦čé ą╝ą░čĆ 16, 2017 21:46:51, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ. |
| ąŻą▒ą░čĆą╗ ąĮą░čĆčāčłąĄąĮąĖąĄ ą┐2.7 |
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
selenur
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 16:04:49 |
|
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 72
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 14, 2017 04:00:11
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 102
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĢčüą╗ąĖ ą║ą░ą╝ąĄčĆą░ ąĘą░ą║čĆąĄą┐ą╗ąĄąĮą░ ą┐ąŠ čāą│ą╗ąŠą╝, č鹊 ą┐ąŠ 2-ą╝ č鹊čćą║ą░ą╝, ąŠčüčéą░ąĄčéčüčÅ ąĮąĄą▒ąŠą╗čīčłą░čÅ ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī. ą¤ąŠ 4-ą╝ č鹊čćą║ą░ą╝ čāąČąĄ ąĮąĄčé.
ą¤čĆąĖ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╝ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĖ ą║ą░ą╝ąĄčĆčŗ, ą┤ąŠą╗ąČąĮąŠ čģą▓ą░čéą░čéčī ąĖ 2-čģ č鹊č湥ą║.
_________________
ą×ą▒ąŠ ą╝ąĮąĄ: selenur.ru
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
PolSerg
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 16:14:04 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
ąÜą░čĆą╝ą░: 9
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 81
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ą┤ąĄą║ 29, 2008 15:32:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 313
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
selenur ą┐ąĖčüą░ą╗(ą░): ą¤čĆąĖ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╝ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĖ ą║ą░ą╝ąĄčĆčŗ, ą┤ąŠą╗ąČąĮąŠ čģą▓ą░čéą░čéčī ąĖ 2-čģ č鹊č湥ą║. ąŁč鹊 čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī čćč鹊 čäčĆąĄąĘąĄčĆ, ą║ąŠč鹊čĆčŗą╣ ąĘą░čüą▓ąĄčĆą╗ąĖą▓ą░ąĄčé ąŠčéą▓ąĄčĆčüčéąĖčÅ ą▓ąĮąŠčüąĖčé ąĖčüą║ą░ąČąĄąĮąĖčÅ ą╗ąĖąĮąĄą╣ąĮąŠ ą▓ąŠ ą▓čüąĄčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ, ąĮąŠ, ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ čĆą░ąĘąĮčŗąĄ ąŠčüąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮčŗ ą┐ąŠ čĆą░ąĘąĮąŠą╝čā, ą▓ ąŠą▒čēąĄą╝ čüą╗čāčćą░ąĄ, ąŠčüąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ą░ąČąĄ ąĮąĄ čüąŠą▓čüąĄą╝ ą┐ąĄčĆą┐ąĄąĮą┤ąĖą║čāą╗čÅčĆąĮčŗ, ą║ą░ą║ ąĖ ąŠčüąĖ HLDI, ą┐čĆąĖą▓čÅąĘą║ą░ ą┐ąŠ 4ą╝ č鹊čćą║ą░ą╝ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čāčüčéčĆą░ąĮąĖčé ą▓čüąĄ ąĮąĄčüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Seriyvolk
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 20:09:10 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 93
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2090
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 05, 2012 20:19:55
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4852
ą×čéą║čāą┤ą░: ą£ąĖąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤čĆąĖą▓čÅąĘą║ą░ ą┐ąŠ 4-ąĄą╝ č鹊čćą║ą░ą╝ - čŹč鹊 ą▓ąĄčĆčģ ą╝ąĄčćčéą░ąĮąĖą╣ ą┤ą╗čÅ čŹč鹊ą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ. ąØąŠ ąĖ ą║ąŠąĮčåąĄą▓ąĖą║ąĖ, čģąŠčéčÅ ą▒čŗ čüč鹊ą╗ą░, čüčćąĖčéą░čÄ ą┤ą░ą╗ąĄą║ąŠ ąĮąĄ ą╗ąĖčłąĮąĄą╣ ąŠą┐čåąĖąĄą╣.
_________________
ą¤čĆąĖą▒ąŠčĆ, ąĘą░čēąĖčēčæąĮąĮčŗą╣ ą┐čĆąĄą┤ąŠčģčĆą░ąĮąĖč鹥ą╗ąĄą╝, čüą│ąŠčĆą░ąĄčé ą┐ąĄčĆą▓čŗą╝, ąĘą░čēąĖčéąĖą▓ ą┐čĆąĄą┤ąŠčģčĆą░ąĮąĖč鹥ą╗čī. ąŚą░ą║ąŠąĮ ą£ąĄčĆčäąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Serj_K
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ - ąĖą┤ąĄčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. HL ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 16, 2017 21:08:46 |
|
ąÜą░čĆą╝ą░: 16
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 177
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 14, 2012 16:11:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 718
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Seriyvolk ą┐ąĖčüą░ą╗(ą░): ąØąŠ ąĖ ą║ąŠąĮčåąĄą▓ąĖą║ąĖ, čģąŠčéčÅ ą▒čŗ čüč鹊ą╗ą░, čüčćąĖčéą░čÄ ą┤ą░ą╗ąĄą║ąŠ ąĮąĄ ą╗ąĖčłąĮąĄą╣ ąŠą┐čåąĖąĄą╣. ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ ą╝ąŠąČąĮąŠ ąŠą▒ąŠą╣čéąĖčüčī ą▒ąĄąĘ ą║ąŠąĮčåąĄą▓ąĖą║ą░ ą┐ąŠ ąź, ąĄčüą╗ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī čüąĖą│ąĮą░ą╗ 菹Įą║ąŠą┤ąĄčĆą░ - ą┐ąĄčĆąĄčüčéą░ą╗ ą╝ąĄąĮčÅčéčīčüčÅ, ąĘąĮą░čćąĖčé čāą┐ąŠčĆ. ąØąŠ čÅ čü čģąŠą┤čā ąĮąĄ ą▓čŖąĄčģą░ą╗ ą▓ ą░ą╗ą│ąŠčĆąĖčéą╝ ąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ ą┐ąŠčüčéą░ą▓ąĖą╗ ą║ąŠąĮčåąĄą▓ąĖą║. ąóą░ą║ ąŠą║ą░ąĘą░ą╗ąŠčüčī ą┐čĆąŠčēąĄ ąĖ ą▒čŗčüčéčĆąĄąĄ, ą░ ąĘą░ ąŠą┤ąĮąŠ ą┐ąŠčÅą▓ąĖą╗ą░čüčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī ą╝ąŠą╝ąĄąĮčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ. ąĪąĄą│ąŠą┤ąĮčÅ ą┐čĆąŠą▒ąŠą▓ą░ą╗ čĆąĄčłąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą¤ąśąö ąĮą░ čłčéą░čéąĮąŠą╝ USB. ąöąŠą▒ą░ą▓ąĖą╗ ą▓ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠ USB ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā ą┐ąŠ UART ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ "čĆąĄą░ą╗čīąĮąŠą╣" čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąØąĄ ą┐ąŠą╝ąŠą│ą╗ąŠ. ą¤ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ą┐čĆąŠą▒ą╗ąĄą╝ą░ ąĖą╗ąĖ ą▓ ą┐čĆąĖčæą╝ąĄ ą┤ą░ąĮąĮčŗčģ ąŠčé ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖą╗ąĖ ą▓čüčæ čéą░ą║ąĖ ą▓ "ą┐ą░ą║ąĄčéąĮąŠčüčéąĖ" USB ąŠą▒ą╝ąĄąĮą░. ą¤ąŠ ą┐čĆąĖčæą╝čā čÅ ąĄčēčæ ą┐ąŠą┤čāą╝ą░čÄ, ą░ ąŠčüčéą░ą╗čīąĮąŠąĄ ąĘą░ą▓čÅąĘą░ąĮąŠ ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝čā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 180 ąĖąĘ 476
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9506 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: usoleg ąĖ ą│ąŠčüčéąĖ: 21 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|










