|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 310 ąĖąĘ 476
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9506 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
psychos

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą┐čĆ 18, 2018 19:40:10 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Ruzikčā č鹥ą▒čÅ ą║ą░ą║ąŠą╣ ą╗ą░ąĘąĄčĆ(ą╝ąŠčēąĮąŠčüčéčī, ą╝ąŠą┤ąĄą╗čī) čü ą║ąŠč鹊čĆąŠą│ąŠ ąÆąÉąź čüąĮčÅą╗?
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī psychos ąĪčĆ ą░ą┐čĆ 18, 2018 19:51:36, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą┐čĆ 18, 2018 19:40:51 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Ruzik ą┐ąĖčüą░ą╗(ą░): SDimok čüąĄą╣čćą░čü ą┐ąŠą║ą░ąČąĄčé ą▓ąŠčé čéą░ą║ąŠą╣ čüą╝ą░ą╣ą╗. ąöą░ ąĮąĄ, ąĮąĄ ą┐ąŠą║ą░ąČąĄčé.  Ruzik ą┐ąĖčüą░ą╗(ą░): ąÜą░ą║ čéčŗ ą▓ąĖą┤ąĖčłčī ąĮą░čüčéčĆąŠą╣ą║čā? ą¦ąĄčüčéąĮąŠ ą│ąŠą▓ąŠčĆčÅ, ąŠčüąŠą▒ąŠ ąĮąĄ ą┤čāą╝ą░ą╗, čéą░ą║ ą║ą░ą║ ą┐čĆąŠą┐ąŠčĆčåąĖąĖ ąŠą▒čŗčćąĮąŠ čüčćąĖčéą░ą╗ ą▓ čāą╝ąĄ ąĖ čāą╝čāą┤čĆčÅą╗čüčÅ ą┐ąŠą┐ą░ą┤ą░čéčī ą▓ č鹥čģąĮąŠą╗ąŠą│ąĖč湥čüą║ąŠąĄ ąŠą║ąĮąŠ.  ąÉ čéą░ą║, ą┤ą░, ą┐ąŠą┤ą▒ąĖčĆą░ąĄą╝ ą┐ąŠąĮčĆą░ą▓ąĖą▓čłąĖą╣čüčÅ čĆąĄąČąĖą╝. ąĀą░čüčüčćąĖčéčŗą▓ą░ąĄą╝ ą┐ąŠą╗čāčćąĖą▓čłčāčÄčüčÅ ą║ąŠąĮčüčéą░ąĮčéčā (ą╝ąŠąČąĮąŠ ą┤ą░ąČąĄ ą▓ čāčüą╗ąŠą▓ąĮčŗčģ ą╝ąöąČ/ąĮą░ ąĄą┤ąĖąĮąĖčåčā ą┐ą╗ąŠčēą░ą┤ąĖ ąĖą╗ąĖ ą▓ ą▒ąŠą╗ąĄąĄ ą┐ąŠąĮčÅčéąĮčŗčģ ą┐ąŠą┐čāą│ą░čÅčģ). ąś, ą┤ą░ą╗ąĄąĄ, ą┐ąŠ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝ąŠą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ čłą░ą│čā čüąŠą▓ąĄčéčāąĄą╝ ąŠą┐ąĄčĆą░č鹊čĆčā ą▓čŗą▒čĆą░čéčī, ąĮą░ą┐čĆąĖą╝ąĄčĆ, čüą║ąŠčĆąŠčüčéčī ąĖ, ąĖčüčģąŠą┤čÅ ąĖąĘ ą┐ąŠą╗čāč湥ąĮąĮąŠą│ąŠ, ą┐ąĄčĆąĄčüčćąĖčéčŗą▓ą░ąĄą╝ ąÜ (ą┤ą╗čÅ ążąĀ) ąĖą╗ąĖ ą▓ ąŠą▒čĆą░čéąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ (ą┤ą╗čÅ ą╝ą░čüą║ąĖ)
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą┐čĆ 18, 2018 19:59:35 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychosąÆ č鹥ą╝ąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ čāąČąĄ ą│ąŠą▓ąŠčĆąĖą╗, ą┤čāą╝ą░ą╗ čéčŗ ą▓ąĖą┤ąĄą╗. ąøą░ąĘąĄčĆ s06j, ą┐ąŠą║čāą┐ą░ą╗ ąĮą░ ebay, ą▒čĆą░ą╗ čéčāčé.. https://www.ebay.com/itm/405nm-700mW-Vi ... 1811788734 čüčĆą░ąĘčā 2, ąĮą░ ąĘą░ą┐ą░čü ąŠą┤ąĖąĮ. ąøą░ąĘąĄčĆčŗ ą▒/čā, čćč鹊ą▒čŗ ą┐ąŠč鹊ą╝ ąĮąĄ ą▒čŗą╗ąŠ ą▓ąŠą┐čĆąŠčüąŠą▓ ą║ąŠ ą╝ąĮąĄ. ąóą░ą║ąŠą╣ ąČąĄ ą╗ą░ąĘąĄčĆ čā mial, ą┐ąŠ ąĄą│ąŠ ąĮą░ą▓ąŠą┤ą║ąĄ ąĖ ą║čāą┐ąĖą╗. ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čÅ ąĮąĄ čüąĮąĖą╝ą░ą╗, ąĮą░čłąĄą╗ čéą░ą▒ą╗ąĖčåčā ą▓ ąĖąĮč鹥čĆąĮąĄč鹥, čéą░ą║ąČąĄ ąĄčüčéčī ą▓ąĖą┤ąĄąŠ (ą║čĆą░čüąĮčŗą╣, čŹč鹊 ąŠą┐čéąĖč湥čüą║ą░čÅ ą╝ąŠčēąĮąŠčüčéčī).. *************************************************************** Forward ą┐ąĖčüą░ą╗(ą░): ąÉ čéą░ą║, ą┤ą░, ą┐ąŠą┤ą▒ąĖčĆą░ąĄą╝ ą┐ąŠąĮčĆą░ą▓ąĖą▓čłąĖą╣čüčÅ čĆąĄąČąĖą╝ ąĢčēąĄ ą▒čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą┤ą░ą▓ą░ą╗ą░ ą┐čĆąĖą╝ąĄčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĘą░čüą▓ąĄčéą║ąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čłą░ą│ą░ (čģąŠčéčÅ čŹč鹊 ą╗ąĖčłąĮąĄąĄ ąĮą░ą▓ąĄčĆąĮąŠ, ąĮąŠ čćč鹊ą▒čŗ ą┐čĆąĖą╝ąĄčĆąĮąŠ ąŠčåąĄąĮąĖčéčī ą▓čĆąĄą╝čÅ ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ ą▒ąŠą╗ąĄąĄ ą╝ąĄą╗ą║ąŠą│ąŠ čłą░ą│ą░).
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą┐čĆ 18, 2018 22:09:45 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
ą¤ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ čÅ čüąĄą│ąŠą┤ąĮčÅ čü čłą░ą│ąŠą╝ 30 ą╝ąĖą║čĆąŠąĮ. ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ ą▓čüąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī. ą¤čĆąŠą▒ąŠą▓ą░ą╗ ą┐čĆą░ą▓ą┤ą░ ąĮą░ ąĘą░ą│čāą▒ą╗ąĄąĮąĮąŠą╣ ąĘą░ą│ąŠč鹊ą▓ą║ąĄ. ąÆąŠ ą▓čĆąĄą╝čÅ čüą▓ąĄčĆą╗ąŠą▓ą║ąĖ ą┐ą╗ą░čéą░ čüą┤ą▓ąĖąĮčāą╗ą░čüčī ąĮąĄą╝ąĮąŠą│ąŠ, čćą░čüčéčī ąŠčéą▓ąĄčĆčüčéąĖą╣ čāčłą╗ą░ ą▓ čüč鹊čĆąŠąĮčā. ąĘą░ą╝ąĄčéąĖą╗ čāąČąĄ ą║ąŠą│ą┤ą░ ą┐čĆąŠčŹą║čüą┐ąŠąĮąĖčĆąŠą▓ą░ą╗. ąØąŠ ąĘą░č鹊 ą▒čŗą╗ąŠ ąĮą░ č湥ą╝ ą┐ąŠčŹą║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī. ąÆ ą┐čĆąŠčåąĄčüčüąĄ ą▓čŗą╗ąĄąĘą╗ą░ ąĄčēąĄ ąĮąĄ ą▒ąŠą╗čīčłą░čÅ ą║čāčćą║ą░ ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄ ąŠčéąĮąŠčüčÅčēąĖą╝čüčÅ ą║ čāčüčéą░ąĮąŠą▓ą║ąĄ, ąĖ ąĮąĄ ąĘą░ą╝ąĄčéąĮą░čÅ ą┐čĆąĖ ą▒ąŠą╗ąĄąĄ č鹊ą╗čüčéčŗčģ ą┤ąŠčĆąŠą│ą░čģ. ąÆąŠčé čüą║čĆąĖąĮ čŹč鹊ą│ąŠ ąČąĄ ą╝ąĄčüčéą░. ąŚą░ą╝ąĄčĆąĖą╗ ąĮą░ čāčüčéą░ąĮąŠą▓ą║ąĄ, ą┐ąŠą╗čāčćąĖą╗ą░čüčī č鹊ą╗čēąĖąĮą░ 0.14 ą╝ą╝, ąĘą░ąĘąŠčĆčŗ 0.16. ą¤ąŠą│čĆąĄčłąĮąŠčüčéčī ąĮą░ą▓ąĄčĆąĮąŠ ą▓ ą┐ą░čĆčā čüąŠč鹊ą║ ąĄčüčéčī. ąóą░ą║ ą║ą░ą║ čüą▓ąĄčé ąĮąĄą╝ąĮąŠą│ąŠ čĆą░ąĘą╝ą░ąĘčŗą▓ą░ąĄčé ą┤ąŠčĆąŠą│čā. ąØąŠ ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ čü čāč湥č鹊ą╝ ą▒ąŠą║ąŠą▓ąŠą│ąŠ ą┐ąŠą┤čéčĆą░ą▓ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ. ąÆąĄčĆčéąĖą║ą░ą╗čīąĮčŗąĄ ą┤ąŠčĆąŠąČą║ąĖ ą┐ąŠą╗čāčćąĖą╗ąĖčüčī 0.106. ą¦č鹊 ą▒čŗ č鹊čćąĮąŠ ąĘą░ą╝ąĄčĆąĖčéčī ąĮą░ą┤ąŠ ą▒čŗą╗ąŠ ą║ąŠąĮąĄčćąĮąŠ ą┐ąŠą▓ąĄčĆąĮčāčéčī ą┐ą╗ą░čéčā ąĮą░ 90 ą│čĆą░ą┤. ąĖ ąĘą░ą╝ąĄčĆąĖčéčī čüč鹊ą╗ąŠą╝. ąØąŠ č湥č鹊 ą┐ąŠą╗ąĄąĮąĖą╗čüčÅ. ąÆąĖąĘčāą░ą╗čīąĮąŠ ą┤čāą╝ą░čÄ ą▓ čĆą░ą╣ąŠąĮąĄ 0.12 ą╝ą╝, čéą░ą║ ą║ą░ą║ čüą╗ąĄą┤čāčÄčēąĖą╣ čłą░ą│ 菹Įą║ąŠą┤ąĄčĆą░ čāąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čćč鹊 ą▓ čĆą░ą╣ąŠąĮąĄ 0.15 ą╝ą╝. ąĪą▓ąĄčéąĖą╗ ąĮą░ ąÜ*=0.146 čüą║ąŠčĆąŠčüčéčī 1000 ą╝ą╝/čüąĄą║. ąĪą┐ąŠą╣ą╗ąĄčĆ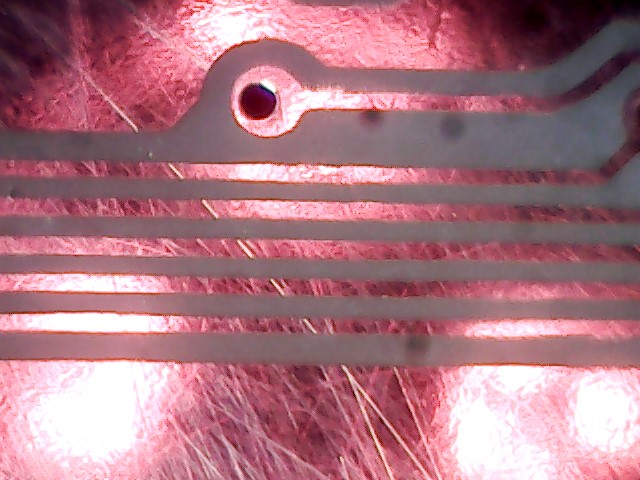
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą┐čĆ 18, 2018 22:38:13 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
mial ą┐ąĖčüą░ą╗(ą░): ą¤ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ čÅ čüąĄą│ąŠą┤ąĮčÅ čü čłą░ą│ąŠą╝ 30 ą╝ąĖą║čĆąŠąĮ ąźąŠčĆąŠčłąŠ ąĘą░čåąĄą┐ąĖą╗ąŠ  mial ą┐ąĖčüą░ą╗(ą░): ąÆąĄčĆčéąĖą║ą░ą╗čīąĮčŗąĄ ą┤ąŠčĆąŠąČą║ąĖ ą┐ąŠą╗čāčćąĖą╗ąĖčüčī 0.106. ą¤ąŠ ą┐čĆąĖą▓čŗčćą║ąĄ 720čģ1? ąÆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ SDimok ąŠąĮąŠ ąČąĄ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéčī ą£ąŠąČąĮąŠ ą╗ąĄąĮčéčā čü ą┤čĆčāą│ąĖą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐čĆąĖą║čĆčāčéąĖčéčī ąĖą╗ąĖ ą┐ąŠčüčéą░ą▓ąĖčéčī čģ2 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą┐čĆ 18, 2018 22:46:13 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
1440 čüč鹊čÅą╗ąŠ, ąĮąŠ ą┐čĆąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĖ ąŠąĮąŠ ąČąĄ ą▓čüąĄ čĆą░ą▓ąĮąŠ 720.
ąĪą║ąĖąĮčī ą╝ąĮąĄ ą┐čĆąŠčłąĖą▓ą║čā ą┤ą╗čÅ ą╝ą░ą│ąĮąĖčéąĮąŠą│ąŠ 菹Įą║ąŠą┤ąĄčĆą░. ąŻ ą╝ąĄąĮčÅ ąČąĄ ą▓čüąĄ čéą░ą║ ąĖ čüč鹊ąĖčé, ąĮąĄ čüąĮąĖą╝ą░ą╗ ą┐ąŠą║ą░. ą¤ąŠą┐čĆąŠą▒čāčÄ čü ąĮąĖą╝. ąÆ čüą▓ąĄč鹥 ąĮąĄ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čłą░ą│ą░ čüč鹊ą╗ą░ ą┤čāą╝ą░čÄ ą▒čāą┤ąĄčé čģąŠčĆąŠčłąŠ.
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą┐čĆ 18, 2018 22:57:31 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĪą║ąĖąĮčī ą╝ąĮąĄ ą┐čĆąŠčłąĖą▓ą║čā ą┤ą╗čÅ ą╝ą░ą│ąĮąĖčéąĮąŠą│ąŠ 菹Įą║ąŠą┤ąĄčĆą░ ąØąĄ ą▓ąŠą┐čĆąŠčü, ąĮąŠ čÅ ą┐ąŠą║ą░ ą▓ ąŠčéčŖąĄąĘą┤ąĄ. ą¤ąŠąĖčēčā, ąĄčüą╗ąĖ ąĄčüčéčī čü čüąŠą▒ąŠą╣ - ą┐čĆąĖčłą╗čÄ, ąĄčüą╗ąĖ ąĮąĄčéčā, č鹊 ą▓ ą▓čŗčģąŠą┤ąĮčŗąĄ. 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą░ą┐čĆ 19, 2018 07:32:27 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Ruzik, ąśąĘą▓ąĖąĮąĖ, ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĮąĄ čāą▓ąĖą┤ąĄą╗, čÅ ą┤ą░ą▓ąĮąŠ ą▓ č鹥ą╝čā ąĮąĄ ąĘą░čģąŠą┤ąĖą╗, čüčéą░čĆčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ č湥čĆąĄąĘ čüčéčĆąŠčćą║čā ą┐ąŠą╝ąĮčÄ. 50mw (K=1) (55mA 5.09v) ą£ą░čüą║ą░ FSR-8000 1441/1019-450 (res x/y-spd(mm/s))         ąØą░ čüą┐ą╗ąŠčłąĮąŠą╣ ąĘą░ą╗ąĖą▓ą║ąĄ ą▓čüčæ-čéą░ą║ąĖ ą▓ąĖą┤ąĮčŗ čüą║ą░čćą║ąĖ čüčéčĆąŠą║ čüč鹊ą╗ą░. čłą░ą│ąĖ ą║ą░čĆąĄčéą║ąĖ/čüč鹊ą╗ą░ 35.24/24,92 ą£ą░čüą║čā ąĘą░ąČą░čĆąĖą╗(čü čŹčéąĖą╝ čĆą░ąĘąŠą▒čĆą░ą╗čüčÅ- ą┐ąŠč湥ą╝čā), ą┐ąŠčŹč鹊ą╝čā ąĄčüčéčī ąĮąĄą┤ąŠą┐čĆąŠčÅą▓ą║ąĖ. SDimok, ąÆąŠąĘą╝ąŠąČąĮąŠ ą╗ąĖ ą║ ą║ą░ąČą┤ąŠą╣ ą▓ąĄčĆčüąĖąĖ ą║ą╗ąĖąĄąĮčéčüą║ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ąĖą┤ąĄčéčī ąĖčüčģąŠą┤ąĮąĖą║ąĖ, ą┤ą╗čÅ ą┤ąŠčĆą░ą▒ąŠčéą║ąĖ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗą╝ąĖ čģąŠč鹥ą╗ą║ą░ą╝ąĖ ? ą╝ąŠąČąĄčé ąĮą░čćąĮčæą╝ ą║ąŠą╗ą╗ąĄą║čéąĖą▓ąĮąŠ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čéčī? ąĖą╗ąĖ ą┐čĆąŠąĄą║čé ą║ąŠą╝ą╝ąĄčĆčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ ą▒ą┤ąĄčé ? ąĖą╗ąĖ ą│ą┤ąĄ ąĮąĖą▒čāą┤čī ą▓ ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą╝ąĄčüč鹥(ą┤čĆčāą┐ą▒ąŠą║čü ą▓ čŹč鹊ą╝ ą┐ą╗ą░ąĮąĄ čģąŠčĆąŠčł, čéą░ą╝ ą│čĆčāą┐ą┐ąŠą▓ąŠą╣ ą┤ąŠčüčéčāą┐ ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī) ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ą▒čŗ ą║ąĖčéą░ą╣čåčŗ ąĮąĄ čüčéą░čēąĖą╗ąĖ... ? ąĮą░ ą┤ą░ąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ąŠč湥ąĮčī čüčĆąŠčćąĮčŗą╣ ą▓ąŠą┐čĆąŠčü ą┐ąŠ HotKey ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐ąŠ čĆąĄą┐ąĄčĆą░ą╝, ąĘąĖą╝ąŠą╣ ą▒čāą┤ąĄčé ą░ą║čéčāą░ą╗ąĄąĮ ą▓ąŠą┐čĆąŠčü čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čĆą░ą▒č鹊čŗ čü ą┐ąŠą╗ąĖą│ąŠąĮą░ą╗čīąĮą╝ ąĘąĄčĆą║ą░ą╗ąŠą╝. ąĪą╝ąŠčéčĆčÄ čā ąĮąĄą║ąŠč鹊čĆčŗčģ ąÜ ąŠą║ąŠą╗ąŠ 0,1, čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą╝ąĖąĮąĖą╝čāą╝ ą▓ 10 čĆą░ąĘ ą╝ąŠąČąĮąŠ čāą╝ąĄąĮčīčłąĖčéčī ą▓čĆąĄą╝čÅ čŹą║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą╗ą░ąĘąĄčĆą░ ąĮą░ ą┐ąŠą╗ąĮčāčÄ... ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▒čāą┤ąĄčé čüą▓ąŠą╣, ąĮąŠ ą┐čĆąŠč鹊ą║ąŠą╗ ąŠą▒ą╝ąĄąĮą░ ą╝ąŠąČąĮąŠ čüąŠą▓ą╝ąĄčüčéąĖčéčī ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą▓čüčæ ą▓ čĆą░ą╝ą║ą░čģ ąŠą┤ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą¤ą╗ąŠą┤ąĖčéčī ą┐čĆąŠąĄą║čéčŗ ąĮąĄ čĆą░ąĘčāą╝ąĮąŠ ąĖ ąĮąĄ čĆą░čåąĖąŠąĮą░ą╗čīąĮąŠ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą░ą┐čĆ 19, 2018 08:27:07 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
 |
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 8
|
ąØą░ čüą┐ą╗ąŠčłąĮąŠą╣ ąĘą░ą╗ąĖą▓ą║ąĄ ą▓čüčæ-čéą░ą║ąĖ ą▓ąĖą┤ąĮčŗ čüą║ą░čćą║ąĖ čüčéčĆąŠą║ čüč鹊ą╗ą░. čłą░ą│ąĖ ą║ą░čĆąĄčéą║ąĖ/čüč鹊ą╗ą░ 35.24/24,92 ą¤čĆąĖ 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĖ ą╝ą░čüą║ąĖ ąĮčāąČąĮąŠ ąĮąĄą╝ąĮąŠą│ąŠ čĆą░čüč乊ą║čāčüąĖčĆąŠą▓ą░čéčī ą╗čāčć ą╗ą░ąĘąĄčĆą░, č鹊ą│ą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé "ą│čĆą░ą╝ą┐ą╗ą░čüčéąĖąĮą║ąĖ". ąöą╗čÅ čŹč鹊ą│ąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ č乊čĆčāą╝čćą░ąĮąĄ ą┐ąŠą┤ą║ą╗ą░ą┤čŗą▓ą░čÄčé ą┐ąŠą┤ ą┐ą╗ą░čéčā ą║čāčüąŠą║ č鹥ą║čüč鹊ą╗ąĖčéą░. ą¤ąŠ ą┐ąŠą▓ąŠą┤čā ąĖčüčģąŠą┤ąĮąĖą║ąŠą▓: ą▓čŗą║ą╗ą░ą┤čŗą▓ą░čéčī ąĖčģ čÅ ąĮąĄ ą┐ą╗ą░ąĮąĖčĆčāčÄ (ąĘą░č湥ą╝ ą┐ą╗ąŠą┤ąĖčéčī čüčāčēąĮąŠčüčéąĖ). ąöą░ ąĖ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ ąĮąĄą╝ ą▒čāą┤ąĄčé ąŠč湥ąĮčī čģą╗ąŠą┐ąŠčéąĮąŠ, ą┐ąŠč鹊ą╝čā ą║ą░ą║ čéą░ą╝ čéą░ą║ąŠą╣ čüčéčĆą░čłąĮčŗą╣ ąæą½ąöąøą×ąÜą×ąö ą¤čĆąŠčēąĄ čüą▓ąŠą╣ ąĮą░ą┐ąĖčüą░čéčī. ąŻ ą╝ąĄąĮčÅ ąĮą░ą┐čĆąĖą╝ąĄčĆ čéą░ą║ą░čÅ ą╝čŗčüą╗čī ą┐čĆąĖčłą╗ą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ čÅ ą┐ąŠą│ą╗čÅą┤ąĄą╗ ą▓ ąĖčüčģąŠą┤ąĮąĖą║ąĖ ą░ą▓č鹊čĆčüą║ąŠą╣ ą▓ąĄčĆčüąĖąĖ ąĮą░ č乊čĆč鹥
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą░ą┐čĆ 19, 2018 08:42:18 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychos ą┐ąĖčüą░ą╗(ą░): ą£ą░čüą║ą░ FSR-8000 1441/1019-450 (res x/y-spd(mm/s)) ą¤ąŠą╗ąŠčüą░č鹊čüčéčī čāą▒ąĖčĆą░ąĄčéčüčÅ ąĖą╗ąĖ ą▓čŗčéčÅą│ąĖą▓ą░ąĮąĖąĄą╝ čĆąĖčüčāąĮą║ą░ ą┐ąŠ Y, ą┤ą╗čÅ čŹč鹊ą│ąŠ čüčéą░ą▓ąĖą╝ čłą░ą│ čüč鹊ą╗ą░ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░čüč乊ą║čāčüąĖčĆąŠą▓ą║ąŠą╣ ą╗ą░ąĘąĄčĆą░, ą┐ąŠą┤ą╗ąŠąČąĖą▓ ą┐ąŠą┤ ą┐ą╗ą░čéčā ą┐čĆąŠą║ą╗ą░ą┤ą║čā, čā ą╝ąĄąĮčÅ čŹčéą░ ą┐čĆąŠą║ą░ą╗ą░ą┤ą║ą░ 3 ą╝ą╝. viewtopic.php?p=3192620#p3192620
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą░ą┐čĆ 19, 2018 10:25:36 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤ąŠą╗ąŠčüą░č鹊čüčéčī čāą▒ąĖčĆą░ąĄčéčüčÅ ąĖą╗ąĖ ą▓čŗčéčÅą│ąĖą▓ą░ąĮąĖąĄą╝ čĆąĖčüčāąĮą║ą░ ą┐ąŠ Y... ąÆčüą┐ąŠą╝ąĮąĖą╗ čéą▓ąŠąĖ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ čü bmp. ąś čćč鹊 č鹊 ą╝ąĄąĮčÅ č湥čĆą▓čÅč湥ą║ ą│čĆčŗąĘčéčī čüčéą░ą╗. ąÆąĄą┤čī ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ čłą░ą│ą░ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄčüčćąĖčéčŗą▓ą░čéčī čüą╝ąĄčēąĄąĮąĖąĄ ą║ą░ą╝ąĄčĆčŗ  ? ąśą╗ąĖ čÅ ą┐ąĄčĆąĄčĆą░ą▒ąŠčéą░ą╗ čüąĄą│ąŠą┤ąĮčÅ. ą» ą┐ąŠčģąŠą┤čā čāą┐čāčüčéąĖą╗ čüąĄą╣ ą╝ąŠą╝ąĄąĮčé  , ąĖ ąĖąĘ ąĘą░ čŹč鹊ą│ąŠ ą┐ąŠą▓ąŠčĆąŠčé ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ ą┐čĆąŠą╝ą░čģąĖą▓ą░ąĄčéčüčÅ. ąöą░ą╣č鹥 ą╝ąĮąĄ ą▓ąŠą┤čŗ....
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą░ą┐čĆ 19, 2018 11:08:35 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
SDimok ąÆąŠą┤čŗ? ąÆąŠčé.. viewtopic.php?p=3192546#p3192546ąÜąŠą│ą┤ą░ čĆą░čüčéčÅą│ąĖą▓ą░ą╗/čüąČąĖą╝ą░ą╗ BMP ąĖ ą╝ąĄąĮčÅą╗ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč鹊ą╗ą░, č鹊 čüą╝ąĄčēąĄąĮąĖąĄ ą║ą░ą╝ąĄčĆčŗ ą┐ąŠ ąĮąŠą▓ąŠą╣ ą┤ąĄą╗ą░ą╗. ąÆąĄčĆąĮąĄą╣ čÅ ąĮąĄ ąĮą░čüčéčĆą░ąĖą▓ą░ą╗ ą┐ąŠ ąĮąŠą▓ąŠą╣ čüą╝ąĄčēąĄąĮąĖąĄ, ą░ čüą┤ąĄą╗ą░ą╗ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖąĮąĖ čäą░ą╣ą╗ąŠą▓, ą│ą┤ąĄ čüą╝ąĄčłąĄąĮąĖąĄ ą║ą░ą╝ąĄčĆčŗ ą┐ąŠ Y ąĖą╗ąĖ čāą▓ąĄą╗ąĖč湥ąĮąŠ ąĖą╗ąĖ čāą╝ąĄąĮčīčłąĄąĮąŠ ą▓ 2.. 3 čĆą░ąĘą░ (ąĮą░ ą║ą░ą╗čīą║čāą╗čÅč鹊čĆąĄ ą┤ąĄą╗ąĖą╗/čāą╝ąĮąŠąČą░ą╗ čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ąĖ ą▓ą┐ąĖčüčŗą▓ą░ą╗ ą▓ ąĖąĮąĖ čäą░ą╣ą╗). ąØą░ą┐čĆąĖą╝ąĄčĆ (ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĄąĘ ąĘąĮą░ą║ąŠą▓ ą┐ąŠčüą╗ąĄ ąĘą░ą┐čÅč鹊ą╣, čćč鹊ą▒čŗ ą┐ąŠąĮčÅčéąĮąĄą╣ ą▒čŗą╗ąŠ): ąØąŠčĆą╝ą░ą╗čīąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ.. CAMOFFY -6 CAMOFFX 24 ąĪąČą░čéčŗą╣ ą┐ąŠ Y ą▓ 2 čĆą░ąĘą░ BMP.. CAMOFFY -3 CAMOFFX 24 ąŻą▓ąĄą╗ąĖč湥ąĮąĮčŗą╣ ą┐ąŠ Y ą▓ 2 čĆą░ąĘą░ BMP.. CAMOFFY -12 CAMOFFX 24 ąÉ čéą░ą║, ą┤ą░, ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą╝ąĄčēąĄąĮąĖčÅ, čāą▒ąĄą│ą░ąĄčé čéą░ą╝ ą▓čüąĄ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 13 minutes 19 seconds:SDimok ą┐ąĖčüą░ą╗(ą░): ą┐ąŠčģąŠą┤čā čāą┐čāčüčéąĖą╗ čüąĄą╣ ą╝ąŠą╝ąĄąĮčé , ąĖ ąĖąĘ ąĘą░ čŹč鹊ą│ąŠ ą┐ąŠą▓ąŠčĆąŠčé ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ ą┐čĆąŠą╝ą░čģąĖą▓ą░ąĄčéčüčÅ. ą¤ąŠ ąĖą┤ąĄąĄ ąĮąĄ č鹊ą╗čīą║ąŠ ą┐ąŠą▓ąŠčĆąŠčé ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą╝ą░čģąĖą▓ą░čéčīčüčÅ, čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ č鹊ąČąĄ ą┤ąŠą╗ąČąĮąŠ. ą» ą┤ąĄą╗ą░ą╗ ą┐ą╗ą░čéčā ą▒ąĄąĘ ą┐ąŠą▓ąŠčĆąŠčéą░ ą┐ąŠ čĆąĄą┐ąĄčĆą░ą╝ čü čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐ąŠ Y ą▒ą╗ąĖąĘą║ąĖą╝ ą║ X (1200čģ1126) ąĖ ąĖąĘ ąĘą░ čŹč鹊ą│ąŠ ąĖ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąĮąŠčĆą╝ą░ą╗čīąĮąŠ. ąĢčüą╗ąĖ ą▒čŗ ą▓čŗą▒čĆą░ą╗ ą┐ąŠ Y čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ 600, č鹊 ąĮą░ą▓ąĄčĆąĮąŠ ą┐ąŠ ą┐ą╗čŗą╗ąŠ ą▒čŗ. ąźąŠčéčÅ čÅ ą┤čāą╝ą░ą╗ čéčŗ čŹč鹊 čéą░ą╝ čāč湥ą╗, ą┐ąŠčŹč鹊ą╝čā ąĖ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅą╗.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą░ą┐čĆ 19, 2018 18:10:21 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØą░ čüą┐ą╗ąŠčłąĮąŠą╣ ąĘą░ą╗ąĖą▓ą║ąĄ ą▓čüčæ-čéą░ą║ąĖ ą▓ąĖą┤ąĮčŗ čüą║ą░čćą║ąĖ čüčéčĆąŠą║ čüč鹊ą╗ą░. čłą░ą│ąĖ ą║ą░čĆąĄčéą║ąĖ/čüč鹊ą╗ą░ 35.24/24,92 ą¤čĆąĖ 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĖ ą╝ą░čüą║ąĖ ąĮčāąČąĮąŠ ąĮąĄą╝ąĮąŠą│ąŠ čĆą░čüč乊ą║čāčüąĖčĆąŠą▓ą░čéčī ą╗čāčć ą╗ą░ąĘąĄčĆą░, č鹊ą│ą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé "ą│čĆą░ą╝ą┐ą╗ą░čüčéąĖąĮą║ąĖ". ąöą╗čÅ čŹč鹊ą│ąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ č乊čĆčāą╝čćą░ąĮąĄ ą┐ąŠą┤ą║ą╗ą░ą┤čŗą▓ą░čÄčé ą┐ąŠą┤ ą┐ą╗ą░čéčā ą║čāčüąŠą║ č鹥ą║čüč鹊ą╗ąĖčéą░. ąóą░ą╝ čüčāčéčī ą▓ąŠą┐čĆąŠčüą░ ąĮąĄ ą▓ ą│čĆą░ą╝ą╝ą┐ą╗ą░čüčéąĖąĮą║ąĄ, ą░ ą▓ ą┐ą╗ą░ą▓ą░ąĮąĖąĖ čüčéčĆąŠą║... čéą░ą║ąŠą╣ ą▓ąŠą┐čĆąŠčü, ąĄčüą╗ąĖ ą╝čŗ ąĘą░ąČąĖą╝ą░ąĄą╝ SHIFT+ąÆąØąśąŚ, ąĖ ą┤ąĄčƹȹĖą╝, čüč鹊ą╗ ą┐ąŠčüčéčĆąŠčćąĮąŠ ą┐ąŠą╗ąĘčæčé... ą┐čĆąĖ čŹč鹊ą╝ ą▓ ą║ąŠąĮčéčĆąŠą╗ąĄčĆ ąĖą┤čæčé ą║ą░ąČą┤ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą╗ąĘą║ą░ ? ąĖą╗ąĖ ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖą┤čæčé ąĮąĄčćč鹊 ą▓čĆąŠą┤ąĄ... "ą┐ąŠą╗ąĘčéąĖ ą▓ąĮąĖąĘ čü čéą░ą║ąĖą╝ č鹊 čłą░ą│ąŠą╝ čü čéą░ą║ąŠą╣ č鹊 čćą░čüč鹊č鹊ą╣, ąĖ ąĮąĄ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╣čüčÅ ą┐ąŠą║ą░ čÅ ąĮąĄ čüą║ą░ąČčā"... ? ąĖą╗ąĖ ąĮą░ ą║ą░ąČą┤čāčÄ čüčéčĆąŠą║čā ąĖą┤čæčé ą║ąŠą╝ą░ąĮą┤ą░ č鹊ą╗čćą║ą░ ? ąĮą░ą▓ąĄčĆąĮąŠ ą┐ąĄčĆą▓ąŠąĄ, čĆą░ąĘ čā ą╝ąĄąĮčÅ ąĮą░ ą┐čĆąĖčåąĄą╗ąĖą▓ą░ąĮąĖąĖ čüč鹊ą╗ ą┐ąŠą┐čæčĆ ą▓ąĮąĖąĘ ąĖ čÅ ąĄą│ąŠ ąĮąĄ ą╝ąŠą│ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą║ą░ ąĮąĄ ą▓čŗą┤ąĄčĆąĮčāą╗ čłąĮčāčĆčŗ ą┐ąĖčéą░ąĮąĖčÅ... ą▒čŗą╗ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓čŗą╗ąĄčéčŗ čüą▓čÅąĘąĖ ą┐čĆąĖčćčæą╝ ą┤ą░ąČąĄ ą▒čŗą╗ąŠ čéą░ą║... ą┐čĆąĖčåąĄą╗ąĖą▓ą░čÄčüčī... čģąŠą┐, čüč鹊ą╗ ą▓čüčéą░ą╗, ą║ą░čĆąĄčéą║ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą▓ ą┐čĆąŠą│čĆą░ą╝ąĄ ąĮąĄ ą╝ąĄąĮčÅąĄčé... ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖą╗ ą┐čĆąŠą│čā, ąŠą┐čÅčéčī ą▓čŗą╗ąĄčé... ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖą╗, ąŠą┐čÅčéčī ą┐ąŠč鹥čĆčÅą╗ą░čüčī čüą▓čÅąĘčī... ąĘą░ą║čĆčŗą╗, ą▓čŗąĮčāą╗ čłąĮčāčĆ USB, ą▓čüčéą░ą▓ąĖą╗, ąĘą░ą┐čāčüčéąĖą╗ ą┐čĆąŠą│čā, ą▓čŗą╗ąĄčéčŗ ą┐čĆąĄą║čĆą░čéąĖą╗ąĖčüčī... ą┤ąŠ čŹč鹊ą│ąŠ 2 ą┤ąĮčÅ ą┐ąŠą┤čĆčÅą┤ ą▒ąĄąĘ ą┐ąĄčĆąĄčĆčŗą▓ą░ čĆą░ą▒ąŠčéą░ą╗ąŠ, čłąĮčāčĆčŗ ąĮąĖ ą║č鹊 ąĮąĄ čéčĆąŠą│ą░ąĄčé. čĆčÅą┤ąŠą╝ ą▓ čéčĆąŠą╣ąĮąĖą║ ąĖ ą┐ąĄčćą║čā ą▓ą║ą╗čÄčćą░ą╗(1kw) ąĖ ą║ąŠą┐ą╝čĆąĄčüčüąŠčĆ 2.2kw, 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąĄ ą▓čüčéą░ą▓ą░ą╗ąŠ, ą░ čéčāčé ąĮą░ čĆąŠą▓ąĮąŠą╝ ą╝ąĄčüč鹥, ąĮąŠčćčīčÄ... ą¤ąŠ ą┐ąŠą▓ąŠą┤čā ąĖčüčģąŠą┤ąĮąĖą║ąŠą▓: ą▓čŗą║ą╗ą░ą┤čŗą▓ą░čéčī ąĖčģ čÅ ąĮąĄ ą┐ą╗ą░ąĮąĖčĆčāčÄ (ąĘą░č湥ą╝ ą┐ą╗ąŠą┤ąĖčéčī čüčāčēąĮąŠčüčéąĖ). ąöą░ ąĖ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ ąĮąĄą╝ ą▒čāą┤ąĄčé ąŠč湥ąĮčī čģą╗ąŠą┐ąŠčéąĮąŠ, ą┐ąŠč鹊ą╝čā ą║ą░ą║ čéą░ą╝ čéą░ą║ąŠą╣ čüčéčĆą░čłąĮčŗą╣ ąæą½ąöąøą×ąÜą×ąö ą¤čĆąŠčēąĄ čüą▓ąŠą╣ ąĮą░ą┐ąĖčüą░čéčī. ąŻ ą╝ąĄąĮčÅ ąĮą░ą┐čĆąĖą╝ąĄčĆ čéą░ą║ą░čÅ ą╝čŗčüą╗čī ą┐čĆąĖčłą╗ą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ čÅ ą┐ąŠą│ą╗čÅą┤ąĄą╗ ą▓ ąĖčüčģąŠą┤ąĮąĖą║ąĖ ą░ą▓č鹊čĆčüą║ąŠą╣ ą▓ąĄčĆčüąĖąĖ ąĮą░ č乊čĆč鹥 ąĮčā ąĖ ąĘčĆčÅ...ą▒čŗą┤ą╗ąŠ ą║ąŠą┤-ąĮąĄ ą▒čŗą┤ą╗ąŠ ą║ąŠą┤, čĆąĄčćčī ąĮąĄ ąŠ ą║čĆą░čüąĖą▓ąŠą╝ ą║ąŠą┤ąĄ... ą░ ą▓čĆąĄą╝čÅ ą▒čŗ ą╝ąĮąŠą│ąŠ čü菹║ąŠąĮąŠą╝ąĖą╗ąŠčüčī... ą╗ą░ą┤ąĮąŠ ą▒čāą┤ąĄą╝ ąĖąĘąŠą▒čĆąĄčéą░čéčī ą▓ąĄą╗ąŠčüąĖą┐ąĄą┤.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 20, 2018 02:40:23 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 2
|
ąĄčüą╗ąĖ ą╝čŗ ąĘą░ąČąĖą╝ą░ąĄą╝ SHIFT+ąÆąØąśąŚ, ąĖ ą┤ąĄčƹȹĖą╝, čüč鹊ą╗ ą┐ąŠčüčéčĆąŠčćąĮąŠ ą┐ąŠą╗ąĘčæčé... ą¤čĆąĖ ąĮą░ąČą░čéąĖąĖ ą┐čĆąŠčüč鹊 čüčéčĆąĄą╗ąŠą║ ą▒ąĄąĘ čłąĖčäčéą░ ą║ąŠąĮčéčĆąŠą╗ą░ ąĖ ą░ą╗čīčéą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčī ąĮą░ 1000000 čłą░ą│ąŠą▓. ą┐čĆąĖ ąŠčéą┐čāčüą║ą░ąĮąĖąĖ čüčéčĆąĄą╗ą║ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ čüč鹊ą┐. ąśąĮąŠą│ą┤ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čéą░ą║, čćč鹊 ą┐ąŠč鹥čĆčÅ č乊ą║čāčüą░ ąŠą║ąĮą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ čüčéčĆąĄą╗ą║ąĖ, ą▒ą╗ąŠą║ąĖčĆčāąĄčé ą┐ąŠą┤ą░čćčā čüąĖą│ąĮą░ą╗ą░ čüč鹊ą┐, ąĖ čüč鹊ą╗ ą╗ąĄčéąĖčé ą▓ čāą┐ąŠčĆ. ąÜą░čĆąĄčéą║ą░ ą┐čĆąĖ čāą┐ąŠčĆąĄ (ąĮąĄčé čüąĖą│ąĮą░ą╗ą░ čü 菹Įą║ąŠą┤ąĄčĆą░) ą▓čüčéą░ąĄčé ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÆčüąĄ čéą░ą║ąĖ ąĄčüčéčī ąŠą▒čĆą░čéąĮą░čÅ čüą▓čÅąĘčī. ą¤čĆąĖ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü čłąĖčäč鹊ą╝ ą║ąŠąĮčéčĆąŠą╗ąŠą╝ ąĖ ą░ą╗čīč鹊ą╝ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ ąĖ ą▓čüąĄ. ąŻ ą╝ąĄąĮčÅ čüč鹊ą╗ ą▓ čłč鹊ą┐ąŠčĆ ąĮąĄ ąĖą┤ąĄčé. ąŻ č鹥ą▒čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĮąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą┐ąŠč鹥čĆčÅ č乊ą║čāčüą░ ąŠą║ąĮąŠą╝. ąÆąŠąĘą╝ąŠąČąĮąŠ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ ąĮąĄ č鹊ą╣ ą▓ąĄčĆčüąĖąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 20, 2018 09:55:35 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą┐ąŠ ąŠą▒čĆčŗą▓ą░ą╝ čüą▓čÅąĘąĖ: čüą▓ąĄčéąĖą╝ ąĮąŠčćčīčÄ, čéą░ą║ čüą║ą░ąĘą░čéčī ą┐ąŠčüčéą░ą▓ąĖą╗ąĖ ąĮą░ ąĮąŠčćčī, ą┐ą╗ą░čéą░ ąĘą░čüą▓ąĄčéąĖą╗ą░čüčī, ą║ąŠą╝ą┐ čāčłąĄą╗ ą▓ ąČą┤čāčćąĖą╣/čüą┐čÅčēąĖą╣. ąŚą░ą┐čāčüą║ą░ąĄą╝ ą║ąŠą╝ą┐, čüą▓čÅąĘąĖ ąĮąĄčé.
ą¤ąĄčĆąĄčéčŗą║ą░ąĄą╝ UDB čüą▓čÅąĘčī ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮąŠ ą┐ąŠč鹊ą╝ č湥čĆąĄąĘ 5-10 čüąĄą║ ą┐čĆąŠą┐ą░ą┤ą░ąĄčé. ąŚą░ą║čĆčŗą▓ą░ąĄą╝ ą┐čĆąŠą│čā ą┐ąĄčĆąĄčéčŗą║ą░ąĄą╝ USB, ąĘą░ą┐čüą║ą░ąĄą╝. ą▓čüčæ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ. čĆą░ą▒ąŠčéą░ąĄą╝ ą┤ą░ą╗čīčłąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Neutron
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 20, 2018 10:14:59 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
 |
ąÜą░čĆą╝ą░: 12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 16
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 28, 2011 13:36:28
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 36
ą×čéą║čāą┤ą░: ą│. ąĪą╗ą░ą▓ą│ąŠčĆąŠą┤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤čĆąĖą▓ąĄčé. ąĪą║ą░ąČąĖ ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąĄčüčéčī ą╗ąĖ ą▓ ą┐ą╗ą░ąĮą░čģ: 1. ąöąŠą▒ą░ą▓ąĖčéčī ą║ąĄčĆąĮąĄąĮąĖąĄ. 2. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčģąŠą┤ąŠą▓ ą║ą░čĆąĄčéą║ąĖ ąĮą░ ąŠą┤ąĖąĮ čłą░ą│ čüč鹊ą╗ą░ (ą║ąŠąĮąĄčćąĮąŠ ą┐ąŠą┤čüą║ą░ąĘą░ą╗ąĖ ą╝ąŠąČąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčī čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąŠ Y, ąĮąŠ čŹč鹊 ąĮąĄ čüąŠą▓čüąĄą╝ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ) 3. ą×ą┐čåąĖčÅ ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮąĖčÅ čüčéčĆąĄą╗ąŠą║ ą▓ą▓ąĄčĆčģ ą▓ąĮąĖąĘ. ąØčā ąĖ ąĮąĄ ą▓ą╗ąĄąĘą░ąĄčé čā ą╝ąĄąĮčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░ 菹║čĆą░ąĮ ąĮąŠčāčéą▒čāą║ą░ 1024*600 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 20, 2018 10:47:29 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤čĆąĖ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü čłąĖčäč鹊ą╝ ą║ąŠąĮčéčĆąŠą╗ąŠą╝ ąĖ ą░ą╗čīč鹊ą╝ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ ąĖ ą▓čüąĄ. ąóąŠ ąĄčüčéčī ąĄčüą╗ąĖ ąĮą░ąČą░čéčī čłąĖčäčé + ą▓ąĮąĖąĘ, ąĖ ą┐čĆąĖ ąĮąĄ čåąĄą╗ąŠą╝ ąĮąŠą╝ąĖąĮą░ą╗ąĄ čłą░ą│ą░ čüč鹊ą╗ą░, ą┤ąŠą┐čāčüčéąĖą╝ 33.57 čĆąĖčüą║ ą┐ąĄčĆąĄčüą║ąŠą║ą░ ąĖčüą║ą╗čÄč湊ąĮ ? ąÉ č鹊 čćč鹊 čÅ ą┐ą░ą╗čīčåąĄą╝ ąĮą░ ąĮą░čéčÅąČąĮąŠą╝ čĆąŠą╗ąĖą║ąĄ čćčāą▓čüčéą▓čāčÄ ą┐ąĄčĆąĄčüą║ąŠą║ čŹč鹊 č鹊ąČąĄ ą╝ąŠąĖ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗąĄ ą│ą╗čÄą║ąĖ ąĖ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ? ąśą╗ąĖ ą▓čüčæ čéą░ą║ąĖ čćč鹊 č鹊 čü ą▓čŗčćąĖčüą┤ąĄąĮąĖčÅą╝ąĖ ? ą£ąŠąČąĮąŠ ą║ą░ą║ č鹊 čĆčÅą┤ąŠą╝ čü ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ąĖ ą▓čŗą▓ąĄąĘąĖ č鹊čé ąĖąĮą║čĆąĖą╝ąĄąĮčé čćč鹊 čāčģąŠą┤ąĖčé ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ? ą¤ąŠą╗ąĄ ą╝ąŠąČąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅčéčī č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čü ą║ą╗ą░ą▓čŗ čłąĖčäčé ąĮą░ąČą░čéčī, ąĮčā ą╝ąŠąČąĮąŠ ąĖ ą┐čĆąĖ ąĘą░čüą▓ąĄčéą║ąĄ, ą▒čāą┤ąĄą╝ ą▓ąĖą┤ąĄčéčī ą┐čĆąĖčĆą░čēąĄąĮąĖąĄ ą┐čĆąĖ ą┤ą▓ąĖąČąĄąĮąĖąĖ čüč鹊ą╗ą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 20, 2018 14:06:53 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 8
|
Neutron ą┐ąĖčüą░ą╗(ą░): ą╝ąŠąČąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčī čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąŠ Y, ąĮąŠ čŹč鹊 ąĮąĄ čüąŠą▓čüąĄą╝ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą×ą▒ąŠčüąĮčāą╣ Neutron ą┐ąĖčüą░ą╗(ą░): ą×ą┐čåąĖčÅ ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮąĖčÅ čüčéčĆąĄą╗ąŠą║ ą▓ą▓ąĄčĆčģ ą▓ąĮąĖąĘ. ąÜą░č鹥ą│ąŠčĆąĖč湥čüą║ąĖ ąĮąĄ čüąŠą│ą╗ą░čüąĄąĮ. ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ ąÆąĪąĢąōąöąÉ ą┤ąŠą╗ąČąĮąŠ čüąŠą▓ą┐ą░ą┤ą░čéčī čü ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čüčéčĆąĄą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. psychos ą┐ąĖčüą░ą╗(ą░): ą┐čĆąĖ ąĮąĄ čåąĄą╗ąŠą╝ ąĮąŠą╝ąĖąĮą░ą╗ąĄ čłą░ą│ą░ čüč鹊ą╗ą░, ą┤ąŠą┐čāčüčéąĖą╝ 33.57 čĆąĖčüą║ ą┐ąĄčĆąĄčüą║ąŠą║ą░ ąĖčüą║ą╗čÄč湊ąĮ ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč鹊ą╗ą░ ą▓ąĄą╗ąĖčćąĖąĮą░ ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ ąĖ ąĮąĖą║ą░ą║ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąĄą│ąŠ ąĖąĘą╝ąĄąĮąĖčéčī psychos ą┐ąĖčüą░ą╗(ą░): ąÉ č鹊 čćč鹊 čÅ ą┐ą░ą╗čīčåąĄą╝ ąĮą░ ąĮą░čéčÅąČąĮąŠą╝ čĆąŠą╗ąĖą║ąĄ čćčāą▓čüčéą▓čāčÄ ą┐ąĄčĆąĄčüą║ąŠą║ čŹč鹊 č鹊ąČąĄ ą╝ąŠąĖ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗąĄ ą│ą╗čÄą║ąĖ ąĖ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ? ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐ą░ą╗čīčåą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ą╝ąĖą║čĆąŠą╝ąĄčéčĆą░  ą┤ą╗čÅ ąĘą░ą╝ąĄčĆą░ ą╗ąĖąĮąĄą╣ąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ - ąöąÉąÆ ą║ą░č湥čüčéą▓ąĄ čüąŠą▓ąĄčéą░ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄ ąĖąĘčāčćąĖčéčī ą▓ąŠą┐čĆąŠčü ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ ą©ąö ą┐čĆąĖ ą╝ąĖą║čĆąŠčłą░ą│ąĄ ąĖ ąĄą│ąŠ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ, ąĖ, ąĘą░ąŠą┤ąĮąŠ, ą┐ąŠčćąĖčéą░čéčī ą┐čĆąŠ čāą┐čĆčāą│čāčÄ ą┤ąĄč乊čĆą╝ą░čåąĖčÄ ąĖ ąŠąĘąĮą░ą║ąŠą╝ąĖčéčīčüčÅ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ "ą┐ą░čāąĘą░ čāčüą┐ąŠą║ąŠąĄąĮąĖčÅ čüč鹊ą╗ą░" psychos ą┐ąĖčüą░ą╗(ą░): ą£ąŠąČąĮąŠ ą║ą░ą║ č鹊 čĆčÅą┤ąŠą╝ čü ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ąĖ ą▓čŗą▓ąĄąĘąĖ č鹊čé ąĖąĮą║čĆąĖą╝ąĄąĮčé čćč鹊 čāčģąŠą┤ąĖčé ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ? SDimok čāąČąĄ ąŠčéą▓ąĄčéąĖą╗ ąĮą░ čŹč鹊čé ą▓ąŠą┐čĆąŠčü, ąĮąŠ ą╝ąŠą│čā ą┐ąŠą▓č鹊čĆąĖčéčī - ąĘą░č湥ą╝ ąĮčāąČąĮąŠ ą┐ąŠčüč鹊čÅąĮąĮąŠąĄ čåąĄą╗ąŠąĄ čćąĖčüą╗ąŠ ą▓ ąŠčéą┤ąĄą╗čīąĮąŠą╝ ą┐ąŠą╗ąĄ, ą┐čĆąĖąĮąĖą╝ą░čÄčłąĄąĄ č鹊ą╗čīą║ąŠ 6 čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ (1-čĆą░ą▒ąŠč湥ąĄ, 5-ą┐čĆąĖ čĆčāčćąĮąŠą╝ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĖ čüč鹊ą╗ą░)? ąŚą░č湥ą╝ ąĘą░ą│čĆąŠą╝ąŠąČą┤ą░čéčī ąĖąĮč鹥čĆč乥ą╣čü?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 20, 2018 15:03:58 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
SDimokąÆąŠąĘčīą╝ąĖ ąĮą░ ąĘą░ą╝ąĄčéčā. ąÆ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅčģ, ąĄčüą╗ąĖ ą▓čŗą▒čĆą░čéčī ąŠčüčī ą╗ą░ąĘąĄčĆą░ , č鹊 ą▓ ą┐čĆąĖą▓čÅąĘą║ąĄ ą║ čĆąĄą┐ąĄčĆą░ą╝, čüą╝ąĄčēąĄąĮąĖąĄ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ą▓ 2 čĆą░ąĘą░. ąØą░ą┤ąŠ ąĮą░ą▓ąĄčĆąĮąŠ čüą┤ąĄą╗ą░čéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╝ąĖ č湥ą║ą▒ąŠą║čüčŗ (ąŠą▒ą▓ąĄą┤ąĄąĮąŠ čäąĖąŠą╗ąĄč鹊ą▓čŗą╝), čćč鹊ą▒čŗ ąŠąĮąĖ čĆą░ą▒ąŠčéą░ą╗ąĖ č鹊ą╗čīą║ąŠ ą▓ ą╝ąĄąĮčÄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖ ąĮąĄ ą▓ą╗ąĖčÅą╗ąĖ ą┐ąŠč鹊ą╝ ąĮą░ ą┐čĆąĖą▓čÅąĘą║čā.  ąĢčēąĄ, ą┐ąŠ čüą╝ąĄčēąĄąĮąĖčÄ. ą£ąĄąĮčÅčéčī čüą╝ąĄčēąĄąĮąĖąĄ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čłą░ą│ą░ čüč鹊ą╗ą░ ąĮą░ą▓ąĄčĆąĮąŠ ąĮąĄ ąĮą░ą┤ąŠ. ąĪą╝ąĄčēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝, ąĄčüą╗ąĖ ą╝čŗ ą╝ąĄąĮčÅąĄą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč鹊ą╗ą░ ą▓ čŹčéąĖčģ ą┐ąŠą╗čÅčģ..  ąØąŠ čéą░ą║ ą║ą░ą║ ą╝čŗ ą╝ąĄąĮčÅąĄą╝ čłą░ą│ čüč鹊ą╗ą░, ą▒ą░ąĘąŠą▓ąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ. ą¤čĆąŠą▓ąĄčĆąĖą╗ čü čĆą░ąĘąĮčŗą╝ąĖ čłą░ą│ą░ą╝ąĖ, ąĮąĖ ą║čāą┤ą░ ąĮąĄ čāą▒ąĄą│ą░ąĄčé, ą░ ąĄčüą╗ąĖ ą┐ąŠą╝ąĄąĮčÅčéčī ą▓ ą┐ąŠą╗čÅčģ "čüč鹊ą╗", č鹊 čāą▒ąĄą│ą░ąĄčé.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 20, 2018 15:11:23 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
Ruzik "ąĪč鹊ą╗" čŹč鹊 ą▒ą░ąĘąŠą▓ą░čÅ č鹊čćąĮąŠčüčéčī ąŠčüąĖ Y. ą¤ąŠčŹč鹊ą╝čā ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čāčģąŠą┤ąĖčé ąĖ čüą╝ąĄčēąĄąĮąĖąĄ. ąÆčüąĄ ąŠčüčéą░ą╗čīąĮąŠąĄ čŹč鹊 ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮą░čÅ ąŠčé čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ą┐ąŠčŹč鹊ą╝čā ą▓ą╗ąĖčÅąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąĄčćą░čéąĖ.
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 310 ąĖąĘ 476
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9506 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: maliiv, Martian ąĖ ą│ąŠčüčéąĖ: 36 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|




















