|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 4 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 76 ] |
, , , |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
SpeedFighter

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 11, 2017 04:29:24 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 28, 2017 19:07:32
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 63
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąóą░ą║, ą╝čāąČąĖą║ąĖ, ą┤ą░ą▓ą░ą╣č鹥 čĆą░ąĘą▒ąĄčĆąĄą╝čüčÅ.
ą» ą▓ąŠčé čüąĄą╣čćą░čü ą┐ąŠčüą╝ąŠčéčĆąĄą╗ čüą▓ąŠą╣ ą║ąŠą┤, ą░ ąĖą╝ąĄąĮąĮąŠ ąĄą│ąŠ čćą░čüčéčī čü ą║ąĮąŠą┐ą║ą░ą╝ąĖ ąĖ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąŠą╣.
ąĢčēčæ ą┐ąŠčüą╝ąŠčéčĆąĄą╗ disassembly listing. ąöą░, ą▓ąŠąĘą╝ąŠąČąĮąŠ, čćą░čüčéčī čüąŠ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąŠą╣ ąĮąĄąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮą░, ąĮąĄ čüą┐ąŠčĆčÄ, ąØą×!
ąÆ č湥ą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ čĆą░ą▒ąŠčéčŗ čü čéą░ą╣ą╝ąĄčĆąŠą╝ ą┐čĆąĖ ąŠą┐čĆąŠčüąĄ ą║ąĮąŠą┐ąŠą║? ą» ą┐ąŠą╗čāčćą░čÄ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ čĆąĄąĘčāą╗čīčéą░čé ąČąĄ!
ąÆąŠčé ą┐čĆąĖ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĄ ą┤ą░, čŹč鹊 ąĮąĄč鹊čćąĮąŠ - čĆą░ąĘ ąĖ ą│čĆąŠą╝ąŠąĘą┤ą║ąŠ - ą┤ą▓ą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Albert_V
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 11, 2017 04:42:59 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 90
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1859
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čüąĄąĮ 12, 2013 00:54:12
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4119
ą×čéą║čāą┤ą░: ąŚą░ą£ąÜąÉąöčīąĄ. ąóą░ą╝, ą│ą┤ąĄ ą”ąŻą¤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 5
")
|
SpeedFighter ą┐ąĖčüą░ą╗(ą░): ...ąÆ č湥ą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ čĆą░ą▒ąŠčéčŗ čü čéą░ą╣ą╝ąĄčĆąŠą╝ ą┐čĆąĖ ąŠą┐čĆąŠčüąĄ ą║ąĮąŠą┐ąŠą║? ą» ą┐ąŠą╗čāčćą░čÄ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ čĆąĄąĘčāą╗čīčéą░čé ąČąĄ!... ąĢčüą╗ąĖ ą▓ą░čü ąĮąĄ ą▒ąĄčüą┐ąŠą║ąŠąĖčé, čćč鹊 ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ "ą▒ąŠą╗čéą░ąĄčéčüčÅ ą▓ delay" ąŠąĮ ą▒ąŠą╗čīčłąĄ ąĮąĖč湥ą│ąŠ ą┤ąĄą╗ą░čéčī ąĮąĄ ą╝ąŠąČąĄčé - ąĖ čéą░ą║ čüąŠą╣ą┤čæčé.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SpeedFighter
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 11, 2017 05:06:23 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 28, 2017 19:07:32
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 63
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąØąĄ ą▒ąĄčüą┐ąŠą║ąŠąĖčé, ą▓ č鹊ą╝ ą▓ąĄą┤čī ąĖ ą┤ąĄą╗ąŠ.
ą» ą┐čĆąĖą║ąĖąĮčāą╗ ąĄą│ąŠ čĆą░ą▒ąŠčéčā ąĖ ą┐ąŠą┤čāą╝ą░ą╗, ą░ ąĮčāąČąĮąŠ ą╗ąĖ ą│ą┤ąĄ-č鹊 ąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░čéčī, ąŠčéą▓ąĄčé - ąĮąĄčé.
ąØąĄ čüą┐ąŠčĆčÄ, ąĄčüą╗ąĖ ą▒čŗ čÅ ą┤ąĄą╗ą░ą╗ čćč鹊-č鹊 čüą╗ąŠąČąĮąĄąĄ - č鹊 čéą░ą║ ąĮąĄą╗čīąĘčÅ ą▒čŗą╗ąŠ ą▒čŗ ą┤ąĄą╗ą░čéčī.
ą» ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ąŠąĮčÅą╗, ą╝ąŠą╣ ą┐ąĖč湊ą║ (PIC10F322) ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓ąĮąĄčłąĮąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠ ąĮą░ąČą░čéąĖčÄ ą║ąĮąŠą┐ą║ąĖ)?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąÜąĀąÉą£
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 11, 2017 16:08:36 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 138
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2712
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čÅąĮą▓ 10, 2008 22:01:02
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 21796
ą×čéą║čāą┤ą░: ą£ąŠčüą║ąŠą▓čüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī, ążčĆčÅąĘąĖąĮąŠ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą» ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠ-ą┤čĆčāą│ąŠą╝čā ą┤ąĄą╗ą░čÄ: ąóą░ą║ čüą╗ąŠąČąĖą╗ąŠčüčī čćč鹊, ąŠą▒čŗčćąĮąŠ, čüąĖčüč鹥ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą▓čüąĄą│ą┤ą░ ąĮą░čüčéčĆą░ąĖą▓ą░čÄ ąĮą░ 1mS ąĖ, ą┤ą╗čÅ ą┤ąĖčüą║čĆąĄčéąĮčŗčģ ą╝ąĄą╝ą▒čĆą░ąĮąĮčŗčģ ą║ąĮąŠą┐ąŠą║, čÅ ą▓čŗčüčéą░ą▓ą╗čÅčÄ ą▓čĆąĄą╝čÅ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ 5mS ąĖ ą▓čĆąĄą╝čÅ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ 50mS.
ą¤ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ - ąĮą░ ą║ą░ąČą┤čāčÄ ą║ąĮąŠą┐ą║čā ąŠą┤ąĖąĮ čüčćčæčéčćąĖą║ + ą┤ą▓ą░ ą▒ąĖčéą░ ("ą║ąĮąŠą┐ą║ą░ ąĮą░ąČą░čéą░" ąĖ "čäą░ą║čé ąĮą░ąČą░čéąĖčÅ"; ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ - ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĮą░ąČą░čéąĖčÅ ą║ąĮąŠą┐ąŠą║). ąÉ čćč鹊 čŹč鹊 ą┤ą░ąĄčé? ąĢčüą╗ąĖ ąĮčāąČąĄąĮ čüąĖčüč鹥ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ąĮą░ 1 ą╝čü, č鹊 ą▓ ąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ąĄčēąĄ ą┤ąĄą╗ą░ąĄčéčüčÅ čüč湥čéčćąĖą║-ą┤ąĄą╗ąĖč鹥ą╗čī. ąÆ č湥ą╝ čüą╝čŗčüą╗ čĆą░ąĘą┤ąĄą╗čÅčéčī ą┤čĆąĄą▒ąĄąĘą│ ąĮą░ąČą░čéąĖčÅ ąĖ ą┤čĆąĄą▒ąĄąĘą│ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ? ąś ąĘą░č湥ą╝ ą▓čüąĄ čŹč鹊 ą┤ąĄą╗ą░čéčī ąĮą░ ą║ą░ąČą┤čāčÄ ą║ąĮąŠą┐ą║čā? ąÉ ąĄčüą╗ąĖ čŹč鹊 ą╝ą░čéčĆąĖčåą░?  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 4 minutes 5 seconds: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 4 minutes 5 seconds:ą» ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ąŠąĮčÅą╗, ą╝ąŠą╣ ą┐ąĖč湊ą║ (PIC10F322) ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓ąĮąĄčłąĮąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠ ąĮą░ąČą░čéąĖčÄ ą║ąĮąŠą┐ą║ąĖ)? ąØąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ąÆ čŹč鹊ą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ąĄčüčéčī ą×ąöąØą× ą▓ąĮąĄčłąĮąĄąĄ čéą░ą║čéąĖčĆčāąĄą╝ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (INT) ąĖ ą¦ąĢąóą½ąĀąĢ ą▓čģąŠą┤ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠčĆčéą░ (IOC). ąóą░ą║čéąĖčĆčāąĄą╝ąŠąĄ ąĮąĄ ą▓ąĄčłą░čÄčé ąĮą░ ą║ąĮąŠą┐ą║ąĖ. ą×ąĮąŠ ąĮąĖą║ą░ą║ ąĮąĄ ą┐ąŠą╝ąŠąČąĄčé čü ą┤čĆąĄą▒ąĄąĘą│ąŠą╝. ąÉ IOC ą┐čĆąĖą╝ąĄąĮčÅčÄčé ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖąĘ čüąĮą░ ą┐čĆąĖ ąĮą░ąČą░čéąĖąĖ ą║ąĮąŠą┐ąŠą║.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą╗ąĖčéąĖąĄą▓čŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓ EVE ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą░ąĘąĖą░čéčüą║ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░
ąÜą░č湥čüčéą▓ąĄąĮąĮąŠąĄ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąŠčé ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░, ą┤ąŠą╗ąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ąĄą│ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ąĖ čģąĖą╝ąĖč湥čüą║ąĖąĄ čüą▓ąŠą╣čüčéą▓ą░, ą┐čĆąŠčäąĖą╗ąĖ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░, ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖ č鹊ą║ ąĮą░ą│čĆčāąĘą║ąĖ. ą£čŗ čĆą░čüčüą║ą░ąČąĄą╝ ąŠ ą╗ąĖčéąĖą╣-ąĖąŠąĮąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąĮčŗčģ ą▒ą░čéą░čĆąĄčÅčģ EVE ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄčłąĄąĮąĖčÅčģ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąĖčéą░ą╣čüą║ąĖčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹčéąĖčģ ąÉąÜąæ. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čüčéą░čéčīąĄ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą┐ąŠą╝ąŠą│čāčé ąĘą░ą╝ąĄąĮąĖčéčī ą┐čĆąŠą┤čāą║čåąĖčÄ ąĘą░ą┐ą░ą┤ąĮčŗčģ ą▒čĆąĄąĮą┤ąŠą▓ čü ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ čåąĄąĮčŗ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą║ą░č湥čüčéą▓ą░.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
SpeedFighter
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 11, 2017 19:05:13 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 28, 2017 19:07:32
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 63
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÆąŠčé, ą┐ąŠą║ą░ čüą┤ąĄą╗ą░ą╗ čéą░ą║, ą║ą░ą║ ą┐ąŠąĮčÅą╗, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ą║ą╗ą░ą▓ąĖčł. ą¤čĆą░ą▓ąĖą╗čīąĮąŠ ą╗ąĖ? ąĢčüą╗ąĖ ąĮąĄčé, č鹊 čćč鹊 ąĖą╝ąĄąĮąĮąŠ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ? ąÜąŠą┤:ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: // ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ąĮčāąČąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║
#include <stdio.h> // ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░
#include <stdlib.h> // ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą║ąŠąĮčéčĆąŠą╗čÅ
#include <xc.h> // ąĪą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ XC8
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░
#define _XTAL_FREQ 16000000 // ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ 4 ą£ąōčå
#define BOUNCE 15 // ąÆčĆąĄą╝čÅ ą▓ ą╝čü ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤čĆąĄą▒ąĄąĘą│ą░
#define CORRMIN 18 // ą¦ąĖčüą╗ąŠ ąĖč鹥čĆą░čåąĖą╣ ą▓ čåąĖą║ą╗ąĄ ą┤ą╗čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ 100 ą╝ą║čü
#define CORRMAX 79998 // ą¦ąĖčüą╗ąŠ ąĖč鹥čĆą░čåąĖą╣ ą▓ čåąĖą║ą╗ąĄ ą┤ą╗čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ 400000 ą╝ą║čü
// CORR - Correction factor
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čüąĖą│ąĮą░ą╗ą░
#define SIGNAL 30 // ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ ą▓ ą╝ą║čü
// ą×ą▒ąŠąĘąĮą░ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ąĖ ą║ąĮąŠą┐ąŠą║
#define START RA2 // ąÜąĮąŠą┐ą║ą░ ą¤ąŻąĪąÜ ą£ąÜ
#define STOP RA3 // ąÜąĮąŠą┐ą║ą░ ąĪąóą×ą¤ ą£ąÜ
#define LED RA0 // ąÆčŗą▓ąŠą┤ ąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ
#define GREEN 1 // ąĪąĖą│ąĮą░ą╗ ą┤ą╗čÅ ąĘąĄą╗ąĄąĮąŠą│ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░
#define RED 0 // ąĪąĖą│ąĮą░ą╗ ą┤ą╗čÅ ą║čĆą░čüąĮąŠą│ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░
#define GENERATOR RA1 // ąÆčŗčģąŠą┤ ą│ąĄąĮąĄčĆą░č鹊čĆą░
// ąØą░čüčéčĆąŠą╣ą║ą░ ą£ąÜ
#pragma config FOSC = INTOSC // ąÆčŗą▒ąŠčĆ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (ą▓ąĮąĄčłąĮąĖą╣/ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣)
#pragma config BOREN = ON // ąĪą▒čĆąŠčü ą┐čĆąĖ ą┐ąŠč鹥čĆąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ
#pragma config WDTE = ON // ąÆą║ą╗čÄč湥ąĮąĖąĄ/ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░
#pragma config PWRTE = OFF // ąæąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čéą░ą╣ą╝ąĄčĆą░ ą▓ą║ą╗čÄč湥ąĮąĖčÅ (PWRTE)
#pragma config MCLRE = OFF // ą¤ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ č湥čĆąĄąĘ MCLR
#pragma config CP = ON // ąæąĖčé ąĘą░čēąĖčéčŗ
#pragma config LVP = OFF // ąØąĖąĘą║ąŠą▓ąŠą╗čīčéąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ
#pragma config LPBOR = ON // ą¤ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐čĆąĖ ąĮąĖąĘą║ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ
#pragma config BORV = LO // ąÆčŗą▒ąŠčĆ č鹊čćą║ąĖ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ (ąĮąĖąĘą║ą░čÅ/ą▓čŗčüąŠą║ą░čÅ)
#pragma config WRT = OFF // ąŚą░čēąĖčéą░ čäą╗ąĄčł ą┐ą░ą╝čÅčéąĖ ąŠčé ąĘą░ą┐ąĖčüąĖ
// ąØą░čüčéčĆąŠą╣ą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣
[b]INTCON=0b11100000; [/b] // ąØą░čüčéčĆąŠą╣ą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą▓ą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą▓ą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮčÅ Timer()
[b]OPTION=0b00101000;[/b] // ąØą░čüčéčĆąŠą╣ą║ą░ TMR0 (ąŠčéą║ą╗čÄč湥ąĮ ą┐čĆąĄą┤ą┤ąĄą╗ąĖč鹥ą╗čī TMR0), čé.ąĄ. čéą░ą╣ą╝ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čćą░čüč鹊č鹥 16/2 = 8 ą£ąōčå
int main() // ąōą╗ą░ą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ
{
[b] TMR0=0; // ą×ą▒ąĮčāą╗ąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ TMR0[/b]
// ą×ą▒čŖčÅą▓ą╗ąĄąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠąĮą│čĆčā菹ĮčéąĮąŠą│ąŠ ą╝ąĄč鹊ą┤ą░
g_Random[0] = 1;
g_Random[2] = 3;
g_Random[3] = 5;
Prepare(); // ąŚą░ą┐čāčüą║ čäčāąĮą║čåąĖąĖ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ
while(1) // ąæąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ čĆą░ą▒ąŠčéčŗ
{
if(g_bStat) // ą¤čĆąŠą▓ąĄčĆą║ą░ čĆąĄąČąĖą╝ą░
{
LED = GREEN; // ąÆą║ą╗čÄč湥ąĮąĖąĄ ąĘąĄą╗ąĄąĮąŠą│ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ (ą▓ą║ą╗ ą£ąÜ)
RandomDelay(); // ąŚą░ą┐čāčüą║ čäčāąĮą║čåąĖąĖ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ
GENERATOR = 1; // ąÆčŗčüčéą░ą▓ą╗čÅąĄą╝ ą╗ąŠą│. 1 ąĮą░ ą▓čŗčģąŠą┤ ą│ąĄąĮąĄčĆą░č鹊čĆą░
__delay_us(SIGNAL); // ąŚą░ą┤ąĄčƹȹĖą▓ą░ąĄą╝ ą╗ąŠą│. 1 ąĮą░ ą▓čŗčģąŠą┤ąĄ
GENERATOR = 0; // ą×ą▒ąĮčāą╗čÅąĄą╝ ą▓čŗčģąŠą┤ ą│ąĄąĮąĄčĆą░č鹊čĆą░
}
else
{
LED = RED; // ąÆą║ą╗čÄč湥ąĮąĖąĄ ą║čĆą░čüąĮąŠą│ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ (ą▓čŗą║ą╗ ą£ąÜ)
}
}
return 0;
}
// ążčāąĮą║čåąĖčÅ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ
void Prepare()
{
TRISA = 0b1100; // ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąĮąŠąČąĄą║ ą┐ąŠčĆčéą░ ąÉ (ą▓čģąŠą┤)
PORTA = 0b0000; // ą×čćąĖčüčéą║ą░ ą┐ąŠčĆčéą░ A
OSCCON = (1<<4)|(1<<5)|(1<<6); // ąŻčüčéą░ąĮąŠą▓ą║ą░ IRCF = '111' ą┤ą╗čÅ čćą░čüč鹊čéčŗ ą▓ 16 MHz
WPUA&=~((1<<0)|(1<<1)|(1<<2)|(1<<3)); // ą×čéą║ą╗čÄč湥ąĮąĖąĄ WEAK PULL-UP
ANSELA = 0; // ą×čéą║ą╗čÄč湥ąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ čćą░čüčéąĖ
}
void ButtonInterrupt isr(void) // ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║
{
[b]if(TMR0IF)[/b] // ą¤čĆąŠą▓ąĄčĆą║ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░
{
if(!START && STOP && !g_bStat) // ą¤čĆąŠą▓ąĄčĆą║ą░ ąĮą░ ąĮą░ąČą░čéąĖąĄ ą║ą╗ą░ą▓ąĖčłąĖ čüčéą░čĆčé
{
__delay_ms(BOUNCE); // ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤čĆąĄą▒ąĄąĘą│ą░
if(!START && STOP) // ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤čĆąĄą▒ąĄąĘą│ą░
{
g_bStat = 1; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ ą£ąÜ (ą▓ą║ą╗)
}
else
{
g_bStat = 0; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ ą£ąÜ (ą▓čŗą║ą╗)
}
}
else if(START && !STOP && g_bStat) // ą¤čĆąŠą▓ąĄčĆą║ą░ ąĮą░ ąĮą░ąČą░čéąĖąĄ ą║ą╗ą░ą▓ąĖčłąĖ čüč鹊ą┐
{
__delay_ms(BOUNCE); // ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤čĆąĄą▒ąĄąĘą│ą░
if(START && !STOP) // ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤čĆąĄą▒ąĄąĘą│ą░
{
g_bStat = 0; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ ą£ąÜ (ą▓čŗą║ą╗)
}
}
else if(!START && !STOP && g_bStat) // ąŚą░čēąĖčéą░ ąŠčé ą┤čāčĆą░ą║ą░
{
__delay_ms(BOUNCE); // ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤čĆąĄą▒ąĄąĘą│ą░
if(!START && !STOP) // ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤čĆąĄą▒ąĄąĘą│ą░
{
g_bStat = 0; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ ą£ąÜ (ą▓čŗą║ą╗)
}
}
[b]TMR0IF = 0; // Cą▒čĆą░čüčŗą▓ą░ąĄą╝ čäą╗ą░ą│ ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ[/b]
}
}
ąÆąŠčé, ąØą×! ąÆąŠą┐čĆąŠčü ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ č鹊ą╝, ą░ ą║ą░ą║ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą┤ąĄą╗ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘ ą▓ 10-30 ą╝čü? ąÜą░ą║ čĆą░čüčüčāąČą┤ą░čÄ čÅ: 0. ą» ąĮą░čüčéčĆąŠąĖą╗ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ 16 ą£ąōčå ą▓ OSCCON . 1. ąóą░ą╣ą╝ąĄčĆ TMR0 ąĮą░čüčéčĆąŠąĄąĮ ą┐čĆąĖ čŹč鹊ą╝ ąĮą░ 8 ą£ąōčå 2. ą¤čĆąĖ čéą░ą║ąŠą╣ čćą░čüč鹊č鹥, čéą░ą╣ą╝ąĄčĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ ąĘą░ 256*(1/8) = 32 ą╝ą║čü 3. ą£ą░ą╗ąŠ, ąĮčāąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī 20-30 ą╝čü, ąĮąŠ čÅ ąČąĄ ąĮąĄ čüą╝ąŠą│čā ą┐ąŠą╗čāčćąĖčéčī ąĄčæ, ą┤ą░ąČąĄ čü ą┐čĆąĄą┤ą┤ąĄą╗ąĖč鹥ą╗ąĄą╝ ą▓ 256. 4. ąÆčŗą▓ąŠą┤ - ąĮčāąČąĮąŠ ą┐ąŠąĮąĖąČą░čéčī čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą▓ OSCCON ą┤ąŠ 4čģ ą£ąōčå, ąĮąŠ ąĮąĄ čģąŠč鹥ą╗ąŠčüčī ą▒čŗ. ąÜą░ą║ ą▒čŗčéčī? ąÆąŠčé čüą║čĆąĖąĮ ąĖąĘ ą┤ą░čéą░čłąĖčéą░, ą║ąŠą╝čā ąĖąĮč鹥čĆąĄčüąĮąŠ: ąĪą┐ąŠą╣ą╗ąĄčĆ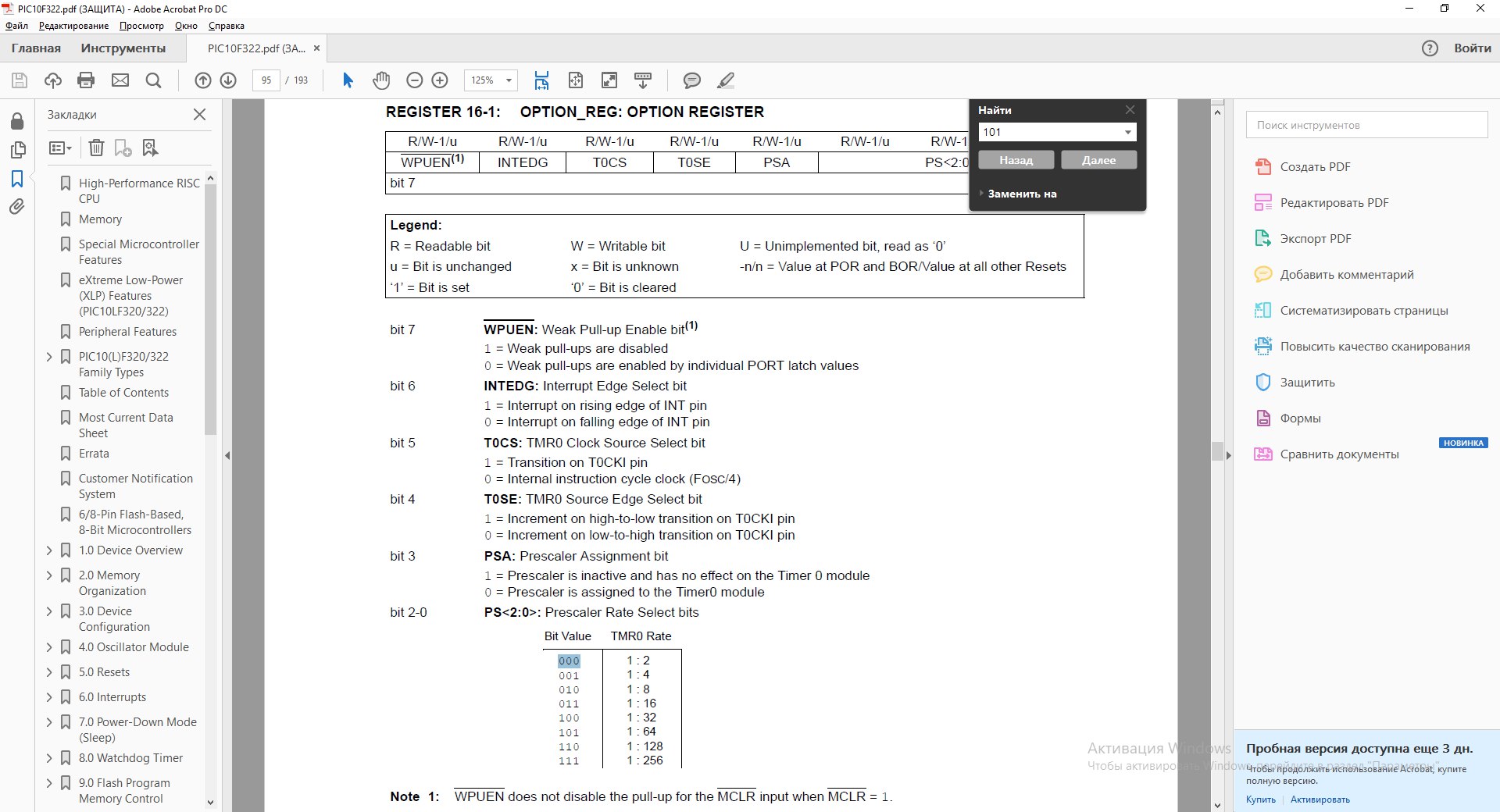 ąÜą░ą║ čüą┤ąĄą╗ą░čéčī čüą╗čāčćą░ą╣ąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā, čé.ąĄ. čćč鹊ą▒čŗ čéą░ą╣ą╝ąĄčĆ čüčćąĖčéą░ą╗ ą┤ąŠ čćąĖčüą╗ą░ N, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čĆą░ąĮąĄąĄ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Albert_V
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą┤ąĄą║ 12, 2017 04:23:14 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 90
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1859
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čüąĄąĮ 12, 2013 00:54:12
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4119
ą×čéą║čāą┤ą░: ąŚą░ą£ąÜąÉąöčīąĄ. ąóą░ą╝, ą│ą┤ąĄ ą”ąŻą¤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 1
ą£ąĄą┤ą░ą╗ąĖ: 5
|
ąÆ č湥ą╝ čüą╝čŗčüą╗ čĆą░ąĘą┤ąĄą╗čÅčéčī ą┤čĆąĄą▒ąĄąĘą│ ąĮą░ąČą░čéąĖčÅ ąĖ ą┤čĆąĄą▒ąĄąĘą│ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ? ąś ąĘą░č湥ą╝ ą▓čüąĄ čŹč鹊 ą┤ąĄą╗ą░čéčī ąĮą░ ą║ą░ąČą┤čāčÄ ą║ąĮąŠą┐ą║čā? ąÉ ąĄčüą╗ąĖ čŹč鹊 ą╝ą░čéčĆąĖčåą░? ąÜąĮąŠą┐ą║ą░, ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą┤ąŠą╗ąČąĮą░ čüčĆą░ą▒ąŠčéą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒čŗčüčéčĆąŠ, ąĮąŠ ąĮąĄ čü "ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĖčćą║ą░" (ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčīčüčÅ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠą╝ąĄčģąŠą╣), ą░ čüąŠą▒čüčéą▓ąĄąĮąĮąŠ "ą┤čĆąĄą▒ąĄąĘą│" čÅ čāą▒ąĖčĆą░čÄ ąĮą░ ąŠčéą┐čāčüą║ą░ąĮąĖąĖ ą║ąĮąŠą┐ą║ąĖ. ąöą╗čÅ ą║ą░ąČą┤ąŠą╣ ą║ąĮąŠą┐ą║ąĖ: ą¤ąŠčćčéąĖ ą▓ąŠ ą▓čüąĄčģ ą╝ąŠąĖčģ ąĖąĘą┤ąĄą╗ąĖčÅčģ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓čģąŠą┤ą░ ą▓ ąĮąĄą║ąŠč鹊čĆčŗąĄ čäčāąĮą║čåąĖąĖ ą┐ąŠ ąĮą░ąČą░čéąĖčÄ (ąĖ čāą┤ąĄčƹȹ░ąĮąĖčÄ) ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ąĮąŠą┐ąŠą║ ą▓ ąŠą┐čĆąĄą┤ąĄą╗čæąĮąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ (ą┐ąŠ ą░ąĮą░ą╗ąŠą│ąĖąĖ čü Ctrl+Alt+Del). ą£ą░čéčĆąĖčćąĮą░čÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ą┤ąĖčüą║čĆąĄčéąĮčŗčģ ą║ąĮąŠą┐ąŠą║ č鹊ą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą╝ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║. ą¤ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ "ą┤čĆąĄą▒ąĄąĘą│ą░" ąŠčüčéą░čæčéčüčÅ ą┐čĆąĄąČąĮąĖą╝. ąĢčüč鹥čüčéą▓ąĄąĮąĮąŠ, ąĄčüą╗ąĖ ą┐ąŠ čāčüą╗ąŠą▓ąĖčÄ, ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ąČą░čéą░ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ą║ąĮąŠą┐ą║ą░ - č鹊ą│ą┤ą░ ą▓čüčæ ąĮą░ą╝ąĮąŠą│ąŠ ą┐čĆąŠčēąĄ... ---------- SpeedFighter ą┐ąĖčüą░ą╗(ą░): ąÜą░ą║ ą▒čŗčéčī? ąØąĄ ąĘą░ą▒čŗą▓ą░ą╣č鹥, čćč鹊 ąĮą░ čéą░ą╣ą╝ąĄčĆčŗ ą┐ąŠą┤ą░čæčéčüčÅ FOSC/4. ąĪ Timer0 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ 16,384mS (FOSC/4/256/256) ą┐čĆąĖ čéą░ą║č鹊ą▓ąŠą╣ 16MHz. ąŻ PIC10F322 ąĄčüčéčī ąĄčēčæ Timer2, čü ą║ąŠč鹊čĆąŠą│ąŠ ą▓čŗ ą╝ąŠąČąĄč鹥 ą┐ąŠą╗čāčćąĖčéčī čćčāčéčī ą▒ąŠą╗ąĄąĄ 65mS (65,536mS) ą┐čĆąĖ čéą░ą║č鹊ą▓ąŠą╣ 16MHz. SpeedFighter ą┐ąĖčüą░ą╗(ą░): čćč鹊ą▒čŗ čéą░ą╣ą╝ąĄčĆ čüčćąĖčéą░ą╗ ą┤ąŠ čćąĖčüą╗ą░ N ąóą░ą╣ą╝ąĄčĆ ą▓čüąĄą│ą┤ą░ ą┤ą░čüčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ ąĮą░ "0". ą¤ąĄčĆąĄčäčĆą░ąĘąĖčĆčāą╣č鹥 ąĘą░ą┤ą░čćčā: "ąØą░ą┤ąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ čéą░ą╣ą╝ąĄčĆ čüčéą░čĆč鹊ą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ".
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SpeedFighter
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą┤ąĄą║ 12, 2017 05:17:46 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 28, 2017 19:07:32
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 63
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąźąŠčĆąŠčłąŠ, čüą┐ą░čüąĖą▒ąŠ.
ąØąŠ čÅ, č湥čüčéąĮąŠ ą│ąŠą▓ąŠčĆčÅ, ąĮąĄ ą┐ąŠąĮčÅą╗, ą▓ č湥ą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║ ą▓ ąöąÉąØąØą×ąÖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ.
ąÉ ą▓ąŠčé ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ąĘą░ą┤ąĄčƹȹ║ąĖ č湥čĆąĄąĘ čéą░ą╣ą╝ąĄčĆčŗ - čÅ ą▓ąĖąČčā, ąĮąŠ ą║ą░ą║ čüą┤ąĄą╗ą░čéčī ąĘą░ą┤ąĄčƹȹ║čā ąŠčé 100 ą╝ą║čü ą┤ąŠ 400 ą╝čü, ąĄčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ TMR2 ą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ ą┤ąŠ 65 ą╝čü ąĘą░ą┤ąĄčƹȹĖą▓ą░čéčī?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Albert_V
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą┤ąĄą║ 12, 2017 05:24:57 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 90
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1859
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čüąĄąĮ 12, 2013 00:54:12
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4119
ą×čéą║čāą┤ą░: ąŚą░ą£ąÜąÉąöčīąĄ. ąóą░ą╝, ą│ą┤ąĄ ą”ąŻą¤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 5
|
|
ąĪ ą║ą░ą║ąŠą╣ ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéčīčÄ (ą║ą░ą║ąŠą╣ čłą░ą│) ąŠčé 100 ą╝ą║čü ą┤ąŠ 400 ą╝čü?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąÜąĀąÉą£
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą┤ąĄą║ 12, 2017 09:16:01 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 138
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2712
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čÅąĮą▓ 10, 2008 22:01:02
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 21796
ą×čéą║čāą┤ą░: ą£ąŠčüą║ąŠą▓čüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī, ążčĆčÅąĘąĖąĮąŠ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜąĮąŠą┐ą║ą░, ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą┤ąŠą╗ąČąĮą░ čüčĆą░ą▒ąŠčéą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒čŗčüčéčĆąŠ ąŚą░č湥ą╝? ąĀąĄą░ą║čåąĖčÅ č湥ą╗ąŠą▓ąĄą║ą░ ąĮą░ ą┐ąŠą┤ąŠą▒ąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▓ąĄą╗ąĖčćąĖąĮąŠą╣ 0,1...0,2 čüąĄą║. ąÜąĮąŠą┐ą║ą░ - čéąĖą┐ąĖčćąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąØąĢ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąØąŠ čÅ, č湥čüčéąĮąŠ ą│ąŠą▓ąŠčĆčÅ, ąĮąĄ ą┐ąŠąĮčÅą╗, ą▓ č湥ą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║ ą▓ ąöąÉąØąØą×ąÖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ.
ąÉ ą▓ąŠčé ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ąĘą░ą┤ąĄčƹȹ║ąĖ č湥čĆąĄąĘ čéą░ą╣ą╝ąĄčĆčŗ - čÅ ą▓ąĖąČčā, ąĮąŠ ą║ą░ą║ čüą┤ąĄą╗ą░čéčī ąĘą░ą┤ąĄčƹȹ║čā ąŠčé 100 ą╝ą║čü ą┤ąŠ 400 ą╝čü, ąĄčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ TMR2 ą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ ą┤ąŠ 65 ą╝čü ąĘą░ą┤ąĄčƹȹĖą▓ą░čéčī? ą¤čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ą▓ "ą┐čĆąŠąĘčĆą░čćąĮąŠčüčéąĖ" čéą░ą║ąŠą│ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą┤ą╗čÅ ąŠčüčéą░ą╗čīąĮąŠą│ąŠ ą║ąŠą┤ą░. ąś ąŠčéą╗ąĖčćąĮąŠą╣ ą┐ąĄčĆąĄąĮąŠčüąĖą╝ąŠčüčéąĖ ą▓ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▓ ąøą«ąæą×ąÖ ą║ąŠą┤. ąöąĄą╗ą░čéčī ąĮčāąČąĮąŠ čüčĆą░ąĘčā ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ą¤čĆąŠ ąĘą░ą┤ąĄčƹȹ║ąĖ. ąóą░ą╣ą╝ąĄčĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą╗ąĖčłčī ą£ąśąØąśą£ąÉąøą¼ąØą½ąÖ ąöąśąĪąÜąĀąĢąó ą▓čĆąĄą╝ąĄąĮąĖ, ą░ ąŠčüčéą░ą╗čīąĮąŠąĄ čĆąĄą░ą╗ąĖąĘčāąĄčéčüčÅ ą¤ąĀą×ąōąĀąÉą£ą£ąØą½ą£ čüč湥čéčćąĖą║ąŠą╝ ąÆąØąŻąóąĀąś ą×ąæąĀąÉąæą×ąóą¦ąśąÜąÉ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčé čéą░ą╣ą╝ąĄčĆą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SpeedFighter
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą┤ąĄą║ 12, 2017 14:39:50 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 28, 2017 19:07:32
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 63
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĪ ą║ą░ą║ąŠą╣ ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéčīčÄ (ą║ą░ą║ąŠą╣ čłą░ą│) ąŠčé 100 ą╝ą║čü ą┤ąŠ 400 ą╝čü? ąĢčüą╗ąĖ č湥čüčéąĮąŠ, čÅ ąĮąĄ ąĘą░ą┤ą░ą▓ą░ą╗čüčÅ čŹčéąĖą╝ ą▓ąŠą┐čĆąŠčüąŠą╝, ą┐ąŠčŹč鹊ą╝čā ą▓čüčéčĆąĄčćąĮčŗą╣ ą▓ąŠą┐čĆąŠčü: ą░ ą║ą░ą║ąĖąĄ ąĄčüčéčī ą▓ą░čĆąĖą░ąĮčéčŗ?  ąÜąĮąŠą┐ą║ą░, ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą┤ąŠą╗ąČąĮą░ čüčĆą░ą▒ąŠčéą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒čŗčüčéčĆąŠ ąŚą░č湥ą╝? ąĀąĄą░ą║čåąĖčÅ č湥ą╗ąŠą▓ąĄą║ą░ ąĮą░ ą┐ąŠą┤ąŠą▒ąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▓ąĄą╗ąĖčćąĖąĮąŠą╣ 0,1...0,2 čüąĄą║. ąÜąĮąŠą┐ą║ą░ - čéąĖą┐ąĖčćąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąØąĢ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąØąŠ čÅ, č湥čüčéąĮąŠ ą│ąŠą▓ąŠčĆčÅ, ąĮąĄ ą┐ąŠąĮčÅą╗, ą▓ č湥ą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║ ą▓ ąöąÉąØąØą×ąÖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ.
ąÉ ą▓ąŠčé ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ąĘą░ą┤ąĄčƹȹ║ąĖ č湥čĆąĄąĘ čéą░ą╣ą╝ąĄčĆčŗ - čÅ ą▓ąĖąČčā, ąĮąŠ ą║ą░ą║ čüą┤ąĄą╗ą░čéčī ąĘą░ą┤ąĄčƹȹ║čā ąŠčé 100 ą╝ą║čü ą┤ąŠ 400 ą╝čü, ąĄčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ TMR2 ą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ ą┤ąŠ 65 ą╝čü ąĘą░ą┤ąĄčƹȹĖą▓ą░čéčī? ą¤čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ą▓ "ą┐čĆąŠąĘčĆą░čćąĮąŠčüčéąĖ" čéą░ą║ąŠą│ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą┤ą╗čÅ ąŠčüčéą░ą╗čīąĮąŠą│ąŠ ą║ąŠą┤ą░. ąś ąŠčéą╗ąĖčćąĮąŠą╣ ą┐ąĄčĆąĄąĮąŠčüąĖą╝ąŠčüčéąĖ ą▓ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▓ ąøą«ąæą×ąÖ ą║ąŠą┤. ąöąĄą╗ą░čéčī ąĮčāąČąĮąŠ čüčĆą░ąĘčā ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ą¤čĆąŠ ąĘą░ą┤ąĄčƹȹ║ąĖ. ąóą░ą╣ą╝ąĄčĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą╗ąĖčłčī ą£ąśąØąśą£ąÉąøą¼ąØą½ąÖ ąöąśąĪąÜąĀąĢąó ą▓čĆąĄą╝ąĄąĮąĖ, ą░ ąŠčüčéą░ą╗čīąĮąŠąĄ čĆąĄą░ą╗ąĖąĘčāąĄčéčüčÅ ą¤ąĀą×ąōąĀąÉą£ą£ąØą½ą£ čüč湥čéčćąĖą║ąŠą╝ ąÆąØąŻąóąĀąś ą×ąæąĀąÉąæą×ąóą¦ąśąÜąÉ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčé čéą░ą╣ą╝ąĄčĆą░. ąØą░čüč湥čé ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║: 1. ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ąĄčĆąĮąĄčéčüčÅ ąĮą░ ą║ą░ą║ąŠą╣ čŹčéą░ą┐? ąĪ č鹊ą│ąŠ ą╝ąŠą╝ąĄąĮčéą░, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąĄčĆą▓ą░ą╗čüčÅ? ąöą░ąČąĄ ąĄčüą╗ąĖ ą▒čŗą╗ ą▓ čåąĖą║ą╗ąĄ? 2. ąĢčüą╗ąĖ čüą┤ąĄą╗ą░čéčī ą│ą╗ąŠą▒ą░ą╗čīąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąĖ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüą┤ąĄą╗ą░čéčī ą┐čĆąĖčüą▓ą░ąĖą▓ą░ąĮąĖąĄ čŹč鹊ą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ čćąĖčüą╗ą░, č鹊 čüąŠčģčĆą░ąĮąĖčéčüčÅ ą╗ąĖ ą▓ ąĮąĄą╣ ąĘąĮą░č湥ąĮąĖąĄ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Albert_V
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą┤ąĄą║ 12, 2017 18:52:25 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 90
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1859
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čüąĄąĮ 12, 2013 00:54:12
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4119
ą×čéą║čāą┤ą░: ąŚą░ą£ąÜąÉąöčīąĄ. ąóą░ą╝, ą│ą┤ąĄ ą”ąŻą¤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 5
|
SpeedFighter ą┐ąĖčüą░ą╗(ą░): ...čÅ ąĮąĄ ąĘą░ą┤ą░ą▓ą░ą╗čüčÅ čŹčéąĖą╝ ą▓ąŠą┐čĆąŠčüąŠą╝, ą┐ąŠčŹč鹊ą╝čā ą▓čüčéčĆąĄčćąĮčŗą╣ ą▓ąŠą┐čĆąŠčü: ą░ ą║ą░ą║ąĖąĄ ąĄčüčéčī ą▓ą░čĆąĖą░ąĮčéčŗ? ąŁč鹊 ąĮą░ą┤ąŠ ąóąŚ čüą╝ąŠčéčĆąĄčéčī...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SpeedFighter
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą┤ąĄą║ 12, 2017 19:07:43 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 28, 2017 19:07:32
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 63
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąØčā ą┤ąŠą┐čāčüčéąĖą╝, čćč鹊 ąĮą░ ą╝ąŠąĄ čāčüą╝ąŠčéčĆąĄąĮąĖąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąÜąĀąÉą£
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą┤ąĄą║ 13, 2017 03:28:27 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 138
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2712
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čÅąĮą▓ 10, 2008 22:01:02
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 21796
ą×čéą║čāą┤ą░: ą£ąŠčüą║ąŠą▓čüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī, ążčĆčÅąĘąĖąĮąŠ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 1
|
ąØą░čüč湥čé ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║:
1. ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ąĄčĆąĮąĄčéčüčÅ ąĮą░ ą║ą░ą║ąŠą╣ čŹčéą░ą┐? ąĪ č鹊ą│ąŠ ą╝ąŠą╝ąĄąĮčéą░, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąĄčĆą▓ą░ą╗čüčÅ? ąöą░ąČąĄ ąĄčüą╗ąĖ ą▒čŗą╗ ą▓ čåąĖą║ą╗ąĄ?
2. ąĢčüą╗ąĖ čüą┤ąĄą╗ą░čéčī ą│ą╗ąŠą▒ą░ą╗čīąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąĖ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüą┤ąĄą╗ą░čéčī ą┐čĆąĖčüą▓ą░ąĖą▓ą░ąĮąĖąĄ čŹč鹊ą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ čćąĖčüą╗ą░, č鹊 čüąŠčģčĆą░ąĮąĖčéčüčÅ ą╗ąĖ ą▓ ąĮąĄą╣ ąĘąĮą░č湥ąĮąĖąĄ? 1. ą¤čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą┐ą░ą┤ąĄčé ąĮą░ čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ąŠčüą╗ąĄ ą┐čĆąĄčĆą▓ą░ąĮąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čā. ąóąŠ ąĄčüčéčī ą┤ą╗čÅ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ą░ą║ ą▒čŗ ąĮąĄ čüčāčēąĄčüčéą▓čāčÄčé, ą┐čĆąĖ ąĖčģ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĘą░ą╝ąĖčĆą░ąĄčé, ą░ ąĘą░č鹥ą╝ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čĆąŠą▓ąĮąŠ čü č鹊ą│ąŠ ą╝ąĄčüčéą░ ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčüčéą░ąĮąŠą▓ą║ą░. 2. ąōą╗ąŠą▒ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĖąĘą╝ąĄąĮąĄąĮąĮą░čÅ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ ąŠčüčéą░ąĮąĄčéčüčÅ ąĖąĘą╝ąĄąĮąĄąĮąĮąŠą╣. ąØąŠ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤čĆčāą│ą░čÅ ąŠą┐ą░čüąĮąŠčüčéčī. ąÜąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą╝ąŠąČąĄčé ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī čćą░čüčéčī ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ čåąĖą║ą╗ą░, ąĄčüą╗ąĖ čāą▓ąĖą┤ąĖčé, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ ąĮąĄ ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāąĄčéčüčÅ, ą░ čéą░ą║ ąČąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąŠčłąĖą▒ą║ą░ ą┐čĆąĖ čćč鹥ąĮąĖąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ, ąĄčüą╗ąĖ ąĄąĄ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī ą▓čŗčłąĄ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą╝ąĄąČą┤čā čćč鹥ąĮąĖčÅą╝ąĖ ą╝ą╗ą░ą┤čłąĄą╣ ąĖ čüčéą░čĆčłąĄą╣ čćą░čüčéčÅą╝ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣). ą¤ąŠčŹč鹊ą╝čā ą▓čüąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāčÄčéčüčÅ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąĖ ąŠą▒čŖčÅą▓ą╗ąĄąĮąĖąĖ ąĖą╝ąĄčéčī ą║ą▓ą░ą╗ąĖčäąĖą║ą░č鹊čĆ volatile ą┐ąĄčĆąĄą┤ čéąĖą┐ąŠą╝, ąĮą░ą┐čĆąĖą╝ąĄčĆ volatile int count; ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆčā ąĖąĘą▒ąĄąČą░čéčī ą│ąĄąĮąĄčĆą░čåąĖąĖ ąŠčłąĖą▒ąŠčćąĮąŠą│ąŠ ą║ąŠą┤ą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ARV
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą┤ąĄą║ 13, 2017 06:54:54 |
|
| ąŻą╝, č湥čüčéčī ąĖ čüąŠą▓ąĄčüčéčī. ąś čüą║čĆąŠą╝ąĮąŠčüčéčī. |
 |
ąÜą░čĆą╝ą░: 97
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2058
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą┤ąĄą║ 28, 2006 08:19:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 18030
ą×čéą║čāą┤ą░: ąØąŠą▓ąŠč湥čĆą║ą░čüčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 2
")
|
|
ąÜą░ą║čāčÄ č鹥ą╝čā ąĮąĄ ą▓ąŠąĘčīą╝ąĖ, ą▓čüąĄ ą▓ ąĖč鹊ą│ąĄ čüą▓ąĄą┤ąĄčéčüčÅ ą╗ąĖą▒ąŠ ą║ ą┐ąŠą╗ąĖčéąĖą║ąĄ, ą╗ąĖą▒ąŠ ą║ ą║ąĮąŠą┐ą║ą░ą╝, ą╗ąĖą▒ąŠ ą║ ąŠą▒čüčāąČą┤ąĄąĮąĖčÄ ą║čĆčāč鹊čüčéąĖ ARM. ą▓ąĄą┤čī ą┐čĆąŠ čüą╗čāčćą░ą╣ąĮčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī č鹥ą╝ą░ ąČąĄ ą▒čŗą╗ą░, ą┐čĆąĖ č湥ą╝ čéčāčé ą║ąĮąŠą┐ą║ąĖ, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, DMA?!
_________________
ąĄčüą╗ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī č湥ą╗ąŠą▓ąĄą║ą░ čüąĮąĖąĘčā, ą┐ąŠą║ą░ąČąĄčéčüčÅ, čćč鹊 ą╝ąŠąĘą│ čā ąĮąĄą│ąŠ ą│ą╗čāą▒ąŠą║ąŠ ą▓ ąČąŠą┐ąĄ
ą┐čĆąĖ ą▓ąĘą│ą╗čÅą┤ąĄ ąĮą░ ą╝ąĮąŠą│ąĖčģ čüą▓ąĄčĆčģčā ąĮąĖč湥ą│ąŠ ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ...
ą£ąŠą╣ čāčÄčéąĮčŗą╣ ą▒ą╗ąŠąČąĖą║... ąĘą░čģąŠą┤ąĖč鹥!
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąÜąĀąÉą£
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą┤ąĄą║ 13, 2017 14:14:47 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 138
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2712
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čÅąĮą▓ 10, 2008 22:01:02
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 21796
ą×čéą║čāą┤ą░: ą£ąŠčüą║ąŠą▓čüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī, ążčĆčÅąĘąĖąĮąŠ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 1
|
ą┐čĆąĖ č湥ą╝ čéčāčé ą║ąĮąŠą┐ą║ąĖ, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, DMA?! ą¤čĆąŠ ąöą£ąÉ čĆą░ąĘą│ąŠą▓ąŠčĆ ąĮąĄ ąĖą┤ąĄčé. ą¤ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ čéčāčé. ą¤čĆąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ą║ąĮąŠą┐ą║ąĖ čĆą░ąĘą│ąŠą▓ąŠčĆ ąĖą┤ąĄčé čĆąŠą▓ąĮąŠ ą┐ąŠč鹊ą╝čā, čćč鹊 ą░ą▓č鹊čĆ čĆąĄą░ą╗ąĖąĘčāąĄčé čüą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠčüčĆąĄą┤čüčéą▓ąŠą╝ ąÜąØą×ą¤ą×ąÜ. ą¤čĆąŠ čüą╗čāčćą░ą╣ąĮčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čāąČąĄ ą▓čüąĄ čĆą░ąĘąŠą▒čĆą░ą╗ąĖ. ą¤čĆą░ą▓ąĖą╗ą░ č乊čĆčāą╝ą░ ąĮąĄ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÄčé ą║čĆčāą│ ąŠą▒čüčāąČą┤ą░ąĄą╝čŗčģ ą▓ąŠą┐čĆąŠčüąŠą▓ ą▓ č鹊ą┐ąĖą║ąĄ č乊čĆą╝čāą╗ąĖčĆąŠą▓ą║ąŠą╣ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░. ąóąĄą╝ą░ ąŠą▒čüčāąČą┤ąĄąĮąĖčÅ ą▓ąŠą╗čīąĮą░ čāčģąŠą┤ąĖčéčī ąÆ ąøą«ąæąŻą« ąóąĢąźąØąśą¦ąĢąĪąÜąŻą« ąĪąóą×ąĀą×ąØąŻ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
dosikus
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüą╗čāčćą░ą╣ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą┤ąĄą║ 13, 2017 21:28:06 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 30
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 155
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąĖčÄą╗ 28, 2008 22:12:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3604
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜą░ą║čāčÄ č鹥ą╝čā ąĮąĄ ą▓ąŠąĘčīą╝ąĖ, ą▓čüąĄ ą▓ ąĖč鹊ą│ąĄ čüą▓ąĄą┤ąĄčéčüčÅ ą╗ąĖą▒ąŠ ą║ ą┐ąŠą╗ąĖčéąĖą║ąĄ, ą╗ąĖą▒ąŠ ą║ ą║ąĮąŠą┐ą║ą░ą╝, ą╗ąĖą▒ąŠ ą║ ąŠą▒čüčāąČą┤ąĄąĮąĖčÄ ą║čĆčāč鹊čüčéąĖ ARM. ą▓ąĄą┤čī ą┐čĆąŠ čüą╗čāčćą░ą╣ąĮčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī č鹥ą╝ą░ ąČąĄ ą▒čŗą╗ą░, ą┐čĆąĖ č湥ą╝ čéčāčé ą║ąĮąŠą┐ą║ąĖ, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, DMA?! ąÆčüąĄ ą┐čĆąŠčüč鹊, čüčéą░čĆąĄąĄčłčī ą▓ąŠčé ąĖ ą▒čĆčĹʹȹĖčłčī. ąöąĄą╗ąŠą╝ ąĘą░ą╣ą╝ąĖčüčī , ą▓čüčÅą║ąŠ ą▓ąĄčüąĄą╗ąĄą╣ ą▒čāą┤ąĄčé..
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 4 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 76 ] |
, , , |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 9 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|










