ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
ąĪčéčĆą░ąĮąĖčåą░ 2 ąĖąĘ 2
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 33 ]
,
ąÉą▓č鹊čĆ
ąĪąŠąŠą▒čēąĄąĮąĖąĄ
AQ29
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 06, 2017 20:56:57
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ąĖčÄą╗ 30, 2011 21:00:24ąĪąŠąŠą▒čēąĄąĮąĖą╣: 61
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 3
ąÉą╗ąĄą║čüąĄą╣ bird , ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ąŠčüčéą░čĆą░čÄčüčī ą┐ąŠą║ą░ąĘą░čéčī čćč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąŠčé RTOS.
ą£ąŠą│čā.
ą¤čĆąĖą▓ąĄą┤čā ą┐čĆąŠčüč鹥ąĮčīą║ąĖą╣ ą║ąŠą┤ ąĮą░ ą╝ą░ą║čĆąŠą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ą▒ąĄąĘ RTOS, čĆąĄą░ą╗ąĖąĘčāčÄčēąĖą╣ ą▓ą░čł ą┐čĆąĖą╝ąĄčĆ
(ą╝ąĮąĄą╝ąŠąĮąĖą║ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖąĘą╝ąĄąĮąĄąĮą░).
L:
Opros_Knopok
(Knopki = Kn_Pusk) ŌåÆ Pusk ' ą¤ąĄčĆąĄčģąŠą┤ ąĮą░ čĆąĄąČąĖą╝ ą┐čāčüą║, ąĄčüą╗ąĖ ąĮą░ąČą░čéą░ ą║ąĮąŠą┐ą║ą░ ą┐čāčüą║
(flg_Int0 = 1) ŌåÆ Int0 ' ą¤ąĄčĆąĄčģąŠą┤ ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ Int0
Vyvod_Indikator
ŌåÆ L ' ą¤ąĄčĆąĄčģąŠą┤ ąĮą░ ą╝ąĄčéą║čā L
Opros_Knopok ŌĆö ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║, čĆąĄąĘčāą╗čīčéą░čéčŗ ą║ąŠč鹊čĆąŠą│ąŠ čģčĆą░ąĮčÅčéčüčÅ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ Knopki.
Vyvod_Indikator - ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą▓ąŠą┤ą░ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆ.
ąöą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░čģ Opros_Knopok ąĖ Vyvod_Indikator ą╝ąŠąČąĮąŠ ą┐ąŠčüčéą░ą▓ąĖčéčī ą║ąŠą╝ą░ąĮą┤čŗ čāčüą║ąŠčĆąĄąĮąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ ą┐čĆąĖ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĖ čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąóą░ą║ąŠą╣ čäą╗ą░ą│ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąóčāčé č鹊ąČąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐čĆąŠčüč鹊ą╣ ąĖ ą┐ąŠąĮčÅčéąĮčŗą╣ ą║ąŠą┤, ąĮąĄą▒ąŠą╗čīčłąŠą╣ ą┐ąŠ ąŠą▒čŖčæą╝čā ąĖ, ąĮą░ą▓ąĄčĆąĮąŠ, ąĮą░ą╝ąĮąŠą│ąŠ ą▒čŗčüčéčĆąĄąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗą╣. ąØą░ą┐ąĖčüą░ą╗ ąĘą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĖąĮčāčé.
ąś ą▓ čćčæą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ RTOS?
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
oleg110592
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░ą╣ 07, 2017 05:58:32
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 32
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 482
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čüąĄąĮ 10, 2011 17:46:25ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3832
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą”ąĖčéą░čéą░:
ąś ą▓ čćčæą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ RTOS?
ąÜą░ą║ čĆą░ąĘ ą┐ąŠ ą▓ą░čłąĄą╝čā ą┐čĆąĖą╝ąĄčĆčā ąĖ ą▓ąĖą┤ąĮąŠ - ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčī čäą╗ą░ą│/čäą╗ą░ą│ąĖ. ąÆ RTOS ą┐ąŠč鹊ą║ąĖ, čŹč鹊 ą║ą░ą║ ą▒čŗ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĮąĖč湥ą│ąŠ ąĮąĄ ąĘąĮą░čéčī ąŠ ą┤čĆčāą│ ą┤čĆčāą│ąĄ - ąĘą░ą┤ą░čćą░ čÅą┤čĆą░ ą┐ąŠ ąŠč湥čĆąĄą┤ąĖ ąĘą░ą┐čāčüą║ą░čéčī ąĖčģ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ARV
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░ą╣ 07, 2017 08:20:34
ąŻą╝, č湥čüčéčī ąĖ čüąŠą▓ąĄčüčéčī. ąś čüą║čĆąŠą╝ąĮąŠčüčéčī.
ąÜą░čĆą╝ą░: 97
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2058
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą┤ąĄą║ 28, 2006 08:19:56ąĪąŠąŠą▒čēąĄąĮąĖą╣: 18030ą×čéą║čāą┤ą░: ąØąŠą▓ąŠč湥čĆą║ą░čüčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 2
oleg110592 ą┐ąĖčüą░ą╗(ą░):
ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčī čäą╗ą░ą│/čäą╗ą░ą│ąĖ. ąÆ RTOS ą┐ąŠč鹊ą║ąĖ, čŹč鹊 ą║ą░ą║ ą▒čŗ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĮąĖč湥ą│ąŠ ąĮąĄ ąĘąĮą░čéčī ąŠ ą┤čĆčāą│ ą┤čĆčāą│ąĄ
ąŁč鹊 č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ "ą┐ąŠč鹊ą║ąĖ" ąĮąĄ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāčÄčé. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąŠą┤ąĖąĮ ą┐ąŠč鹊ą║ ą╝ąĖą│ą░ąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ, ą┤ąĄą╗ą░čÅ ą▒ąĄą│čāčēąĖąĄ ąŠą│ąĮąĖ, ą░ ą┤čĆčāą│ąŠą╣ ą┐ąĖčēąĖčé ą┤ąĖąĮą░ą╝ąĖą║ąŠą╝, ąĮą░ąĖą│čĆčŗą▓ą░čÅ "ą▓ ą╗ąĄčüčā čĆąŠą┤ąĖą╗ą░čüčī čæą╗ąŠčćą║ą░". ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗ ą▓ąŠąĘąĮą░ą╝ąĄčĆąĖč鹥čüčī ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą▓ ą┤čĆčāą│ąŠą╣ ą┐ąĄčĆąĄą┤ą░čéčī ą┤ą░ąĮąĮčŗąĄ - ąĮą░čćąĮčāčéčüčÅ čäą╗ą░ą│ąĖ ąĖ čé.ą┐. ąÆ ą┐čĆąŠčüčéčŗčģ čüą╗čāčćą░čÅčģ čŹč鹊 ą▒čāą┤ąĄčé čüą┤ąĄą╗ą░ąĮąŠ ąĮąĄąĘą░ą╝ąĄčéąĮąŠ ą┤ą╗čÅ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ, čéąĖą┐ą░ send_message-čäčāąĮą║čåąĖąĄą╣, ą▓ ą┤čĆčāą│ąĖčģ ą▒čāą┤ąĄčé ą║čāčćą░ čüąĄą╝ą░č乊čĆąŠą▓, ą╝čīčÄč鹥ą║čüąŠą▓ ąĖ čé.ą┐. čüą╗ąŠąČąĮąŠą┐ąĄčĆąĄą▓ą░čĆąĖą▓ą░ąĄą╝ąŠą╣ čģčĆąĄąĮąĖ.
ąóąŠą╗čīą║ąŠ ą┤ą╗čÅ ą▓čŗčłąĄąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ čüą╗čāčćą░čÅ ą╝čāąĘčŗą║ą░ą╗čīąĮčŗčģ ą▒ąĄą│čāčēąĖčģ ąŠą│ąĮąĄą╣ ą▒ąĄąĘ ą×ąĪ ą┐ąŠą╗čāčćąĖčéčüčÅ ąĮąĖčćčāčéčī ąĮąĄ čüą╗ąŠąČąĮąĄąĄ.
ąĄčüą╗ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī č湥ą╗ąŠą▓ąĄą║ą░ čüąĮąĖąĘčā, ą┐ąŠą║ą░ąČąĄčéčüčÅ, čćč鹊 ą╝ąŠąĘą│ čā ąĮąĄą│ąŠ ą│ą╗čāą▒ąŠą║ąŠ ą▓ ąČąŠą┐ąĄą£ąŠą╣ čāčÄčéąĮčŗą╣ ą▒ą╗ąŠąČąĖą║ ... ąĘą░čģąŠą┤ąĖč鹥!
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
oleg110592
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░ą╣ 07, 2017 08:58:10
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 32
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 482
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čüąĄąĮ 10, 2011 17:46:25ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3832
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗ ą▓ąŠąĘąĮą░ą╝ąĄčĆąĖč鹥čüčī ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą▓ ą┤čĆčāą│ąŠą╣ ą┐ąĄčĆąĄą┤ą░čéčī ą┤ą░ąĮąĮčŗąĄ - ąĮą░čćąĮčāčéčüčÅ čäą╗ą░ą│ąĖ ąĖ čé.ą┐. ąÆ ą┐čĆąŠčüčéčŗčģ čüą╗čāčćą░čÅčģ čŹč鹊 ą▒čāą┤ąĄčé čüą┤ąĄą╗ą░ąĮąŠ ąĮąĄąĘą░ą╝ąĄčéąĮąŠ ą┤ą╗čÅ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ, čéąĖą┐ą░ send_message-čäčāąĮą║čåąĖąĄą╣, ą▓ ą┤čĆčāą│ąĖčģ ą▒čāą┤ąĄčé ą║čāčćą░ čüąĄą╝ą░č乊čĆąŠą▓, ą╝čīčÄč鹥ą║čüąŠą▓ ąĖ čé.ą┐. čüą╗ąŠąČąĮąŠą┐ąĄčĆąĄą▓ą░čĆąĖą▓ą░ąĄą╝ąŠą╣ čģčĆąĄąĮąĖ.
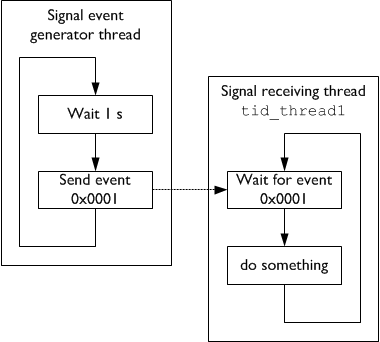
ąĖą╝čģąŠ ąĮąĄ ąŠč湥ąĮčī č鹊 ąĖ čüą╗ąŠąČąĮąŠą┐ąĄčĆąĄą▓ą░čĆąĖą▓ą░ąĄą╝ąŠ:
The following steps are required to use signals:
In the thread (for example thread ID tid_thread1) that is supposed to wait for a signal, call the wait function:
ąÜąŠą┤:
osSignalWait (0x0001, osWaitForever); // wait forever for the signal 0x0001
In another thread (or threads) that are supposed to wake the waiting thread up call:
ąÜąŠą┤:
osSignalSet (tid_thread1, 0x0001); // set the signal 0x0001 for thread tid_thread1
čĆąĄą░ą╗čīąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆčćąĖą║ ą▒ą╗ąĖąĮą║ą░ąĮčīčÅ ą│čĆčāą┐ą┐ąŠą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ ą┐ąŠ ą║ąĮąŠą┐ą║ąĄ CMSIS-RTOS ąĖąĘ ą┐ą░ą║ąŠą▓ ąÜąĄą╣ą╗ą░:
ąĪą┐ąŠą╣ą╗ąĄčĆ ..ąÜąŠą┤:
/*----------
ąÜąŠą┤:
osThreadId tid_blinkLED;
ą▓ą┐ąŠą╗ąĮąĄ ą┐ąĄčĆąĄą▓ą░čĆąĖą▓ą░ąĄą╝ąŠ (ąĖą╝čģąŠ), ą┤ą░ ą╝ąŠąČąĮąŠ ąĖ ą▒ąĄąĘ RTOS ą▓ą┐ąŠą╗ąĮąĄ ą║čĆą░čüąĖą▓ąŠ ąŠč乊čĆą╝ąĖčéčī, ąĮąŠ ą│ąŠą▓ąŠčĆčÅčé čü RTOS ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĘą░ą┤ą░čćąĖ čĆąĄčłą░čéčī ą╗čāčćčłąĄąĄ, č湥ą╝ ą▒ąĄąĘ ąŠąĮąŠą╣
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
ARV
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░ą╣ 07, 2017 10:19:53
ąŻą╝, č湥čüčéčī ąĖ čüąŠą▓ąĄčüčéčī. ąś čüą║čĆąŠą╝ąĮąŠčüčéčī.
ąÜą░čĆą╝ą░: 97
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2058
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą┤ąĄą║ 28, 2006 08:19:56ąĪąŠąŠą▒čēąĄąĮąĖą╣: 18030ą×čéą║čāą┤ą░: ąØąŠą▓ąŠč湥čĆą║ą░čüčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 3
ą£ąĄą┤ą░ą╗ąĖ: 2
oleg110592 ą┐ąĖčüą░ą╗(ą░):
čü RTOS ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĘą░ą┤ą░čćąĖ čĆąĄčłą░čéčī ą╗čāčćčłąĄąĄ, č湥ą╝ ą▒ąĄąĘ ąŠąĮąŠą╣
ą╗ąĖčćąĮąŠ čÅ čü čŹčéąĖą╝ ąĖ ąĮąĄ čüą┐ąŠčĆčÄ. ąĮąŠ č鹊čćąĮąŠ čéą░ą║ ąČąĄ "ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĘą░ą┤ą░čćąĖ" ąĮą░ AVR ą╗čāčćčłąĄ ą▓ąŠąŠą▒čēąĄ ąĮąĄ čĆąĄčłą░čéčī, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĄčüą╗ąĖ ąĘą░ą┤ą░čćąĖ čéčÅąĮčāčé ąĘą░ čüąŠą▒ąŠą╣ ą×ąĪ... ą░ ą┐čĆąĖą┤čāą╝ą░čéčī ą┤ą╗čÅ AVR ąĘą░ą┤ą░čćąĖ, čĆąĄčłąĄąĮąĖąĄ ą║ąŠč鹊čĆčŗčģ čü ą×ąĪ ą║ą░čĆą┤ąĖąĮą░ą╗čīąĮąŠ čāą┤ąŠą▒ąĮąĄąĄ, č湥ą╝ ą▒ąĄąĘ ąĮąĄąĄ, čÅ ąĮąĄ ą╝ąŠą│čā.
ąĄčüą╗ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī č湥ą╗ąŠą▓ąĄą║ą░ čüąĮąĖąĘčā, ą┐ąŠą║ą░ąČąĄčéčüčÅ, čćč鹊 ą╝ąŠąĘą│ čā ąĮąĄą│ąŠ ą│ą╗čāą▒ąŠą║ąŠ ą▓ ąČąŠą┐ąĄą£ąŠą╣ čāčÄčéąĮčŗą╣ ą▒ą╗ąŠąČąĖą║ ... ąĘą░čģąŠą┤ąĖč鹥!
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ąĀąĄą║ą╗ą░ą╝ą░
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
oleg110592
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░ą╣ 07, 2017 18:37:24
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 32
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 482
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čüąĄąĮ 10, 2011 17:46:25ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3832
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąĮąĄ čéą░ą║ čüčéčĆą░čłąĄąĮ... ą¤ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ AVR ą┐ąŠčĆčé čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĮąŠą╣ FreeRTOS, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▒ąŠą╗čīčłčāčÄ čģčāčćčā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ (ąĖ ą┤ą░ąČąĄ Quark ąĖ x86), ąĮą░ mega8. ąöą▓ąĄ ąĘą░ą┤ą░čćąĖ ą▒ą╗ąĖąĮą║ą░ąĮčīčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ. ąÆ ą┐čĆąŠč鹥čāčüąĄ ą┐čĆąŠą▓ąĄčĆąĖą╗ - ą▒ą╗ąĖąĮą║ą░čÄčé.
ąŚą░ąĮčÅą╗ąŠ ą┐ąŠą╗ąŠą▓ąĖąĮčā čĆąĄčüčāčĆčüąŠą▓, ram ą┐ąŠą▒ąŠą╗ąĄąĄ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ:
ąÜąŠą┤:
Device: atmega8
ąČąĖčéčī čü RTOS ą╝ąŠąČąĮąŠ ąĖ ąĮą░ AVR, č鹥ą╝ ą▒ąŠą╗ąĄąĄ ą▓ ąĮą░ą╗ąĖčćąĖąĖ AVR ąĖą╝ąĄčÄčéčüčÅ čŹą║ąĘąĄą╝ą┐ą╗čÅčĆčŗ čü ą▒ąŠą╗ąĄąĄ čĆąĄčüčāčĆčüą░ą╝ąĖ, ą░ ąĄčēąĄ ąĄčüčéčī xmegąĖ č鹊ąČ AVRčŗ, ą░ ąĮą░ AVR32 ą╗ąĖąĮčāą║čüčŗ ąĘą░ą┐čāčüą║ą░čÄčé. ą×čüąĮąŠą▓ąĮąŠą╣ main čäą░ą╣ą╗ ą▓čŗą│ą╗čÅą┤ąĖčé ąĮąĄ čüčéčĆą░čłąĮąŠ:
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
#include "FreeRTOS.h"
ąØąĄ ąĘąĮą░čÄ ąĮą░čüč湥čé ą┐čĆą░ą║čéąĖč湥čüą║ąŠą╣ čåąĄąĮąĮąŠčüčéąĖ ą┐ąŠčĆčéą░ RTOS ą┐ąŠą┤ 8 ą▒ąĖčé AVR, ąĮąŠ ą┐ąŠčāčćąĖčéčüčÅ ą╝ąŠąČąĮąŠ, čü čåąĄą╗čīčÄ ą┐ąŠą╗čāčćąĖčéčī ą┐ąŠč鹊ą╝ ą┐čĆąĄčüčéąĖąČąĮčāčÄ čĆą░ą▒ąŠčéčā
. ąÆčĆąŠą┤ąĄ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, ą│ą┤ąĄ ąČąĖąĘąĮčī č湥ą╗ąŠą▓ąĄą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą▓ąĄčĆą│ąĮčāčéą░ ąŠą┐ą░čüąĮąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮčÅčÄčé čüąĄčĆčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĄąĘąŠą┐ą░čüąĮčŗąĄ RTOS čéąĖą┐ą░:
https://www.highintegritysystems.com/em ... lications/
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
AQ29
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 08, 2017 21:21:45
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ąĖčÄą╗ 30, 2011 21:00:24ąĪąŠąŠą▒čēąĄąĮąĖą╣: 61
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą”ąĖčéą░čéą░:
ąś ą▓ čćčæą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ RTOS?
ąÜą░ą║ čĆą░ąĘ ą┐ąŠ ą▓ą░čłąĄą╝čā ą┐čĆąĖą╝ąĄčĆčā ąĖ ą▓ąĖą┤ąĮąŠ - ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčī čäą╗ą░ą│/čäą╗ą░ą│ąĖ. ąÆ RTOS ą┐ąŠč鹊ą║ąĖ, čŹč鹊 ą║ą░ą║ ą▒čŗ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĮąĖč湥ą│ąŠ ąĮąĄ ąĘąĮą░čéčī ąŠ ą┤čĆčāą│ ą┤čĆčāą│ąĄ - ąĘą░ą┤ą░čćą░ čÅą┤čĆą░ ą┐ąŠ ąŠč湥čĆąĄą┤ąĖ ąĘą░ą┐čāčüą║ą░čéčī ąĖčģ.
ą¦ąĄą╝ čäą╗ą░ą│ąĖ ąĮąĄ ą┐ąŠąĮčĆą░ą▓ąĖą╗ąĖčüčī?
ą×ą┐čĆąŠčüąĖčéčī čäą╗ą░ą│ąĖ ąĮąĄčüą╗ąŠąČąĮąŠ, ą┤ą░ ąĖ čäą╗ą░ą│ąĖ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ čüčéą░čĆą░čÄčüčī ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī. ąÉ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĄčüą╗ąŠąČąĮąŠą╣, čüą║ąŠčĆąŠčüčéąĮąŠą╣, ą╗ąĄą│ą║ąŠ čćąĖčéą░ąĄą╝ąŠą╣.
ąØą░čüčćčæčé č鹊ą│ąŠ, čćč鹊 ┬½ąÆ RTOS ą┐ąŠč鹊ą║ąĖ, čŹč鹊 ą║ą░ą║ ą▒čŗ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĮąĖč湥ą│ąŠ ąĮąĄ ąĘąĮą░čéčī ąŠ ą┤čĆčāą│ ą┤čĆčāą│ąĄ┬╗.
ąöą░ąČąĄ ąĄčüą╗ąĖ ą┐ąŠč鹊ą║ąĖ ą╗ąŠą│ąĖč湥čüą║ąĖ ąĮąĄ čüą▓čÅąĘą░ąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝, ą┤čāą╝ą░čÄ, ąĄčüčéčī ąĄčēčæ ą▓ą░ąČąĮčŗą╣
čüą▓čÅąĘčŗą▓ą░čÄčēąĖą╣ čäą░ą║č鹊čĆ ŌĆö ą▓čĆąĄą╝ąĄąĮąĮąŠą╣, ą║ąŠą│ą┤ą░ ą£ąÜ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčüčéčĆąŠ ąŠčéčĆą░ą▒ąŠčéą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠčåąĄčüčüčŗ.
ąØą░ą▓ąĄčĆąĮąŠ, ┬½čüą║ąŠčĆąŠčüčéąĮčŗąĄ┬╗ ąĘą░ą┤ą░čćąĖ ą▒ąĄąĘ RTOS ą╗čāčćčłąĄ čĆąĄčłą░čÄčéčüčÅ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
microbober
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 09, 2017 01:56:48
ąĀąŠą┤ąĖą╗čüčÅ
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 16, 2008 01:12:59ąĪąŠąŠą▒čēąĄąĮąĖą╣: 12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąØą░ą▓ąĄčĆąĮąŠ, ┬½čüą║ąŠčĆąŠčüčéąĮčŗąĄ┬╗ ąĘą░ą┤ą░čćąĖ ą▒ąĄąĘ RTOS ą╗čāčćčłąĄ čĆąĄčłą░čÄčéčüčÅ.
ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ RTOS čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĘą░ą┤ą░ą▓ą░čéčī ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ą┐ąŠč鹊ą║ąŠą▓.
ąöą╗čÅ ą┐čĆąĖą╝ąĄčĆą░: ą┐ąĄčĆą▓čŗą╣ ą┐ąŠč鹊ą║ - čĆą░ą▒ąŠčéą░ čü SD-ą║ą░čĆč鹊ą╣, ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé; ą▓č鹊čĆąŠą╣ ą┐ąŠč鹊ą║ - ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠčé UART, ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé. ą¤čĆąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┤ąŠą┐čāčēąĄąĮąĖčÅčģ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠą▒čĆą░ą▒ąŠčéą║čā ąĮąĄą╗čīąĘčÅ ą▓čŗąĮąĄčüčéąĖ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ), ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĮą░ čäą╗ą░ą│ą░čģ čĆą░ą▒ąŠčéą░ čü SD ą▒čāą┤ąĄčé ą┐čĆąĖą▓ąŠą┤ąĖčéčī ą║ ą┐ąŠč鹥čĆąĄ čüąŠąŠą▒čēąĄąĮąĖą╣, ą┐ąŠą╗čāčćą░ąĄą╝čŗčģ ą┐ąŠ UART.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
oleg110592
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 09, 2017 12:56:57
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 32
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 482
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čüąĄąĮ 10, 2011 17:46:25ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3832
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą¦ąĄą╝ čäą╗ą░ą│ąĖ ąĮąĄ ą┐ąŠąĮčĆą░ą▓ąĖą╗ąĖčüčī?
ąöčŗą║ čäą╗ą░ą│ą░ą╝ąĖ čüą░ą╝ čéą░ą║ąĖ ąĖ ą┐ąŠą╗čīąĘčāčÄčüčī. ąĀąĄčćčī č鹊 ąŠ č鹊ą╝, čćč鹊 čü RTOS ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▓ąŠąŠą▒čēąĄ ąĮąĄčüą╗ąŠąČąĮąŠą╣ ąĖ ąĄčēąĄ ą▒ąŠą╗ąĄąĄ čćąĖčéą░ąĄą╝ąŠą╣, ą┐ąĄčĆąĄąĮąŠčüąĖą╝ąŠą╣ ąĖ ąĮą░ą┤ąĄąČąĮąŠą╣. ą×čéą┤ąĄą╗čīąĮčŗąĄ ąĘą░ą┤ą░čćąĖ ą╝ąŠą│čāčé ą┐ąĖčüą░čéčī čĆą░ąĘąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčŗ.
ąØą░ą▓ąĄčĆąĮąŠ, ┬½čüą║ąŠčĆąŠčüčéąĮčŗąĄ┬╗ ąĘą░ą┤ą░čćąĖ ą▒ąĄąĘ RTOS ą╗čāčćčłąĄ čĆąĄčłą░čÄčéčüčÅ.
ąØčā čüą░ą╝ą░čÅ ą┐ąŠą┐čāą╗čÅčĆąĮą░čÅ ą▓ ąĀąŠčüčüąĖąĖ RTOS ŌĆö QNX 4.0 (ą┐čĆą░ą▓ą┤ą░ ąĮą░ AVR ą┐ąŠčĆčéą░ ąĮąĄčé) 8ąÜ ą╝ąĖą║čĆąŠčÅą┤čĆąŠ (ą┤ą░-ą┤ą░, ą▓ąŠčüąĄą╝čī ą║ąĖą╗ąŠą▒ą░ą╣čé!) ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░ ŌĆö 2,5 ąĮą░ąĮąŠčüąĄą║čāąĮą┤čŗ, ąĖ čÅą┤čĆąŠ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮą░ą┐ąĖčüą░ąĮąŠ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ, čćč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą▓čŗčüąŠčćą░ą╣čłčāčÄ čüą║ąŠčĆąŠčüčéčī. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą▓ čéą░ą║ąŠą╣ ąĮąĄą▒ąŠą╗čīčłąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą╗ąĄą│č湥 ąĮą░čģąŠą┤ąĖčéčī ąŠčłąĖą▒ą║ąĖ, čćč鹊 ą┤ąĄą╗ą░ąĄčé ąĄą│ąŠ (čÅą┤čĆąŠ) čćčĆąĄąĘą▓čŗčćą░ą╣ąĮąŠ ąĮą░ą┤ąĄąČąĮčŗą╝. QNX
čüą╝ąĄą╗ąŠ ą╝ąŠąČąĮąŠ ąĮą░ąĘą▓ą░čéčī ąŠą┤ąĮąŠą╣ ąĖąĘ čüą░ą╝čŗčģ ą┐čĆąŠčĆą░ą▒ąŠčéą░ąĮąĮčŗčģ ą×ąĪ. ąØąĄ čāą┤ąĖą▓ąĖč鹥ą╗čīąĮąŠ, čćč鹊 ąĄą╣ ą┤ąŠą▓ąĄčĆčÅčÄčé ą║ąŠąĮčéčĆąŠą╗čī ąĮą░ą┤ čÅą┤ąĄčĆąĮčŗą╝ąĖ čĆąĄą░ą║č鹊čĆą░ą╝ąĖ
ąĖ ą╝ąĄą┤ąĖčåąĖąĮčüą║ąĖą╝ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄą╝. ąś č鹊, ąĖ ą┤čĆčāą│ąŠąĄ ąĮą░ą┐čĆčÅą╝čāčÄ čüą▓čÅąĘą░ąĮąŠ čü ąČąĖąĘąĮčīčÄ ąĖ ąĘą┤ąŠčĆąŠą▓čīąĄą╝ ą╗čÄą┤ąĄą╣.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Vladimir1962
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 22, 2017 11:54:48
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 21, 2017 16:43:56ąĪąŠąŠą▒čēąĄąĮąĖą╣: 22
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą¤ąŠą┐čĆąŠą▒čāčÄ ą┤ąŠą┐ąŠą╗ąĮąĖčéčī čŹč鹊čé č鹊ą┐ąĖą║...ą┐ąŠąĘą░ąĮčāą┤ąĮąĖčćą░čÄ, ą╝ąŠąČąĮąŠ?
ą×ąĪ, ą║ą░ą║ ąĖ ąĄčüčéčī ą▓ ąÆąĖą║ąĖ: "ąĮą░ą▒ąŠčĆ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ ą┤ą╗čÅ .. ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü ą┐ąŠą╗ąĘą░č鹥ą╗čÅą╝ąĖ". ąóąŠ ąĄčüčéčī ą×ąĪ čĆąĄčłą░ąĄčé ąĘą░ą┤ą░čćąĖ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĮą░ ą┤ą░ąĮąĮąŠą╝ ąČąĄą╗ąĄąĘąĄ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄčüčāčĆčüą░ą╝ąĖ čŹč鹊ą│ąŠ ąČąĄą╗ąĄąĘą░ ąś ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü č湥ą╗ąŠą▓ąĄą║ąŠą╝.
ą¤ąĄčĆąĄąĮąŠčüčÅ čŹč鹊 ąĮą░ AVR ą║ą░ą║ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ąĖą╝ąĄąĄą╝: čćč鹊ą▒čŗ ą┤ą░ąĮąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą╝ąŠą│ą╗ą░ ąĮąŠčüąĖčéčī ą│ąŠčĆą┤ąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ "ą×ą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ ąĪąĖčüč鹥ą╝ą░", čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čāčüą╗ąŠą▓ąĖą╣ (čü ą║ąŠąĮčåą░):
ą░) čéąĖą┐ąŠą▓ąŠą╣ ą║ąŠą╝ą┐ą╗ąĄą║čé čüčĆąĄą┤čüčéą▓ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝. ąÆ čåąĄą╗ąŠą╝ ąĄčüą╗ąĖ ąĖ ąĮąĄčé, č鹊 ąĮąĄčéčĆčāą┤ąĮąŠ ą▓ą▓ąĄčüčéąĖ ąĮąĄą║ąĖą╣ "čüčéą░ąĮą┤ą░čĆčé" ąĮą░ ą▒ą░ąĘąĄ libc: printf() ąĖ čé.ą┤.;
ą▒) čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄčüčāčĆčüą░ą╝ąĖ .. ą▓ąŠčé čéčāčé čāąČąĄ čģąŠčĆąŠčłąŠ ą▓čŗčģąŠą┤ąĖčé. ąśą▒ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ .. čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ąĖ ąĄą│ąŠ "čĆąĄčüčāčĆčüčŗ" ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗ ą▓ ą┤ą░ąĮąĮąŠą╝ ą║ąŠąĮą║čĆąĄčéąĮąŠą╝ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĖ. ąĀą░ąĘą▓ąĄ čćč鹊 "ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ" ąĖ "čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ"...
ą▓) ąĘą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝ .. ąĖ čéčāčé čüąŠą▓čüąĄą╝ "ąĘą░čüą░ą┤ą░": čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čĆąĄčłąĄąĮąĖčÅ ąĮąĄą║ąŠą╣ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ ąĘą░ą┤ą░čćąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ čüčéčĆąŠą│ąŠ čŹč鹊ą╝, ą║ąŠąĮą║čĆąĄčéąĮąŠą╝ ąŠą║čĆčāąČąĄąĮąĖąĖ .. čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ č鹥čĆą╝ąŠčüčéą░č鹊ą╝, ą┐čĆąŠą▒ąĮąĖą║-ąŠčüčåąĖą╗ąŠą│čĆą░čä, ą¤ąśąö-čĆąĄą│čāą╗čÅč鹊čĆ ą│ąŠąĮąŠčćąĮąŠą╣ č鹥ą╗ąĄąČą║ąĖ, ą║ąŠąĮčéčĆąŠą╗čī čĆą░ą▒ąŠčéčŗ ą▓ąĖą┤ąĄąŠą║ą░ą╝ąĄčĆčŗ ąĖ čüąĖčüč鹥ą╝čŗ ąĄčæ ą▓ą║ą╗čÄč湥ąĮąĖčÅ/ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ, ą┐ąŠą▓ąŠčĆąŠčéą░ .. ąÜąÉąÜ čŹč鹊 ą▓čüąĄ čüąŠą▓ą╝ąĄčüčéąĖčéčī ą▓ čĆą░ą╝ą║ą░čģ ąŠą┤ąĮąŠą╣ "ą×ąĪ" čü ąĄą┤ąĖąĮčŗą╝ ą╝ąĄčģą░ąĮąĖąĘą╝ąŠą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ?
ąØčā ąĖ ą│ą┤ąĄ čéčāčé "ą×ą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ ąĪąĖčüč鹥ą╝ą░", ą║ąŠą│ą┤ą░ ą║ą░ąČą┤ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą╝ąŠąČąĮąŠ čüčćąĖčéą░čéčī čāąĮąĖą║ą░ą╗čīąĮčŗą╝?
ą£ąŠąČąĮąŠ ą▓ąĄčüčéąĖ čĆąĄčćčī ąĘą░ "ą║čāčüąŠą║ RTOS", ą░ ąĖą╝ąĄąĮąĮąŠ ąĘą░ čüąĖčüč鹥ą╝čā ą┐čĆąŠąĘčĆą░čćąĮąŠą│ąŠ čĆą░čüą┐ą░čĆą░ą╗ą╗ąĄą╗ąĖą▓ą░ąĮąĖčÅ ąĘą░ą┤ą░čć - "ą┤ąĖčüą┐ąĄčéč湥čĆ ąĘą░ą┤ą░čć". ą×ąĮ ąĖąĮč鹥čĆąĄčüąĄąĮ ąĖ ą┐ąŠą╗ąĄąĘąĄąĮ ą▒ąŠą╗čīčłąĄ ą▓ čĆą░ą╝ą║ą░čģ "ą░ą▓č鹊ą╝ą░čéąĮąŠą│ąŠ" ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÜąŠą│ą┤ą░ ą║ą░ąČą┤čŗą╣ čĆąĄčüčāčĆčü čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüą▓ąŠąĖą╝ ą║ąŠąĮąĄčćąĮčŗą╝ ą░ą▓č鹊ą╝ą░č鹊ą╝ ąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā ąĮąĄą▓ą░ąČąĮąŠ ą▓ ą║ą░ą║ąŠą╝ ą║ąŠąĮą║čĆąĄčéąĮąŠ ą┐ąŠčĆčÅą┤ą║ąĄ ąĖčüą┐ąŠą╗ąĮčÅčÄčéčüčÅ čŹčéąĖ ą░ą▓č鹊ą╝ą░čéčŗ .. ą┐ąŠčĆčÅą┤ąŠą║ ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ą▓čüąĄ čĆą░ą▓ąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüą╝ąĄąĮąŠą╣ ąĖčģ čüąŠčüč鹊čÅąĮąĖą╣. ąØąŠ, ą║ą░ą║ ąĮąĖ čüčéčĆą░ąĮąĮąŠ, "čÄąĮąĖą║čü-ą┐ąŠą┤ąŠą▒ąĮčŗą╣" čüčéąĖą╗čī čĆą░čüą┐ą░čĆą░ą╗ą╗ąĄą╗ąĖą▓ą░ąĮąĖčÅ ąĘą░ą┤ą░čć .. ą▓ąĮąĄąĘą░ą┐ąĮąŠ ąĮąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čéą░ą║ąŠą╣ čĆą░ą▒ąŠčéčŗ. ąÜčāą┤ą░ ąĖąĮč鹥čĆąĄčüąĮąĄąĄ ą▓ čŹč鹊ą╝ ą┐ą╗ą░ąĮąĄ ą╝ąĄčģą░ąĮąĖąĘą╝čŗ ą╝ąĄąČąĘą░ą┤ą░čćąĮąŠą│ąŠ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čÅąĘčŗą║ą░ ąÉą┤ą░. ą¤čĆą░ą▓ą┤ą░ ąŠąĮ ą┐ąŠčģąŠąČąĄ ą┤ą░ą▓ąĮąŠ ąĘą░ą▒čĆąŠčłąĄąĮ..
P.S. ąĮąĄčüą║ąŠą╗čīą║ąŠ čüčāą╝ą▒čāčĆąĮąŠ ąĮą░ą┐ąĖčüą░ą╗ .. ąĮčā ą┤ą░ ą╗ą░ą┤ąĮąŠ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ARV
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 22, 2017 13:31:54
ąŻą╝, č湥čüčéčī ąĖ čüąŠą▓ąĄčüčéčī. ąś čüą║čĆąŠą╝ąĮąŠčüčéčī.
ąÜą░čĆą╝ą░: 97
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2058
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą┤ąĄą║ 28, 2006 08:19:56ąĪąŠąŠą▒čēąĄąĮąĖą╣: 18030ą×čéą║čāą┤ą░: ąØąŠą▓ąŠč湥čĆą║ą░čüčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 2
Vladimir1962 ą┐ąĖčüą░ą╗(ą░):
čÅąĘčŗą║ą░ ąÉą┤ą░. ą¤čĆą░ą▓ą┤ą░ ąŠąĮ ą┐ąŠčģąŠąČąĄ ą┤ą░ą▓ąĮąŠ ąĘą░ą▒čĆąŠčłąĄąĮ
ą×č湥ąĮčī ą┤ą░ąČąĄ ąĮąĄ ąĘą░ą▒čĆąŠčłąĄąĮ, ą┤ą░ąČąĄ
ą║ąŠąĮą║čāčĆčüčŗ ą▓čüčÅą║ąĖąĄ ą┐čĆąŠą▓ąŠą┤čÅčéčüčÅ...
ąĄčüą╗ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī č湥ą╗ąŠą▓ąĄą║ą░ čüąĮąĖąĘčā, ą┐ąŠą║ą░ąČąĄčéčüčÅ, čćč鹊 ą╝ąŠąĘą│ čā ąĮąĄą│ąŠ ą│ą╗čāą▒ąŠą║ąŠ ą▓ ąČąŠą┐ąĄą£ąŠą╣ čāčÄčéąĮčŗą╣ ą▒ą╗ąŠąČąĖą║ ... ąĘą░čģąŠą┤ąĖč鹥!
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
Vladimir1962
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 22, 2017 14:48:17
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą╝ą░ą╣ 21, 2017 16:43:56ąĪąŠąŠą▒čēąĄąĮąĖą╣: 22
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą¤ą░čüąĖą▒ą║ąĖ, ąĮąĄ ąĘąĮą░ą╗. ą¢ą░ą╗čī čćč鹊 ąĮčā ąŠč湥ąĮčī ą┤ą░ą▓ąĮąŠ, ąĄčēčæ ą┤ąŠ čüčéą░ąĮą┤ą░čĆčéą░ "ąÉą┤ą░-95" ą┐ąŠą╗čīąĘąŠą▓ą░ą╗ čŹč鹊čé čÅąĘčŗą║. ąöą░ ąĖ ą║ą░ą║-č鹊 ą║ąŠąĮą║čĆčāčü ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ ą┐ąŠą┤ STM32F4xx .. ąĄčüčéčī STM32F405, ąĮąŠ čÅ ąĄą│ąŠ ąĄčēčæ ąĮąĄ čĆą░čüą┐ą░ą║ąŠą▓čŗą▓ą░ą╗. ąĪčĆąŠą║ ą┤ąŠ čüąĄąĮčéčÅą▒čĆčÅ .. ą╝ą░ą╗ąŠą▓ą░č鹊 ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ ą▓čüą┐ąŠą╝ąĮąĖčéčī čÅąĘčŗą║, čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ čü ąĮąŠą▓čŗą╝ ą┤ą╗čÅ čüąĄą▒čÅ ą┐čĆąŠčåąŠą╝ ąĖ čćč鹊-č鹊 ąĘą░ą║ąŠą┤ąĖčéčī "ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠąĄ".
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
oleg110592
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąŚą░č湥ą╝ ąĮčāąČąĮą░ RTOS ąĮą░ AVR
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 22, 2017 15:05:11
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 32
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 482
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čüąĄąĮ 10, 2011 17:46:25ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3832
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ADA čü IDE AdaMULTI ą┐ąŠ ą┐čĆąĄąČąĮąĄą╝čā ą▓čŗą┐čāčüą║ą░ąĄčé čāčüą┐ąĄčłąĮąŠ Green Hills
http://www.ghs.com/products/AdaMULTI_IDE.html ADA ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮą░ ą▓ INTEGRITY-178 RTOS.
http://www.ghs.com/products/safety_crit ... -178b.html ą”ąĖčéą░čéą░:
Integrity ŌĆö ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮą░čÅ ą║ą░ą╗ąĖč乊čĆąĮąĖą╣čüą║ąŠą╣ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ Green Hills Software. ąĪąĄčĆčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮą░ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ POSIX. ą×čĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ąŠą┤ąĮąŠą┐čĆąŠčåąĄčüčüąŠčĆąĮčŗąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗąĄ čüąĖčüč鹥ą╝čŗ, ą▓ čåąĄąĮčéčĆą░ą╗čīąĮąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéčīčÄ (ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ARM, XScale, Blackfin, Freescale ColdFire, MIPS, PowerPC, x86). ąĪąĖčüč鹥ą╝ą░ ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ą╝ąĖą║čĆąŠčÅą┤čĆąĄ ┬Ą-velosity. ąōą╗ą░ą▓ąĮą░čÅ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī čüąĖčüč鹥ą╝čŗ ŌĆö ąŠčéą║ą░ąĘąŠčāčüč鹊ą╣čćąĖą▓ąŠčüčéčī (ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčéą║ą░ąĘ ą▓ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĘą░ą┐čāčēąĄąĮąĮąŠą╣ ą▓ čŹč鹊ą╣ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ, čüąĖčüč鹥ą╝ą░ ą▓ čåąĄą╗ąŠą╝ ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčī čĆą░ą▒ąŠčéą░čéčī ą▓ čłčéą░čéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą░ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ čāą┐ą░ą▓čłąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą┐čŗčéą░ąĄčéčüčÅ ą┐čĆąŠą▓ąĄčüčéąĖ čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ ąĄą╝čā č鹥čģ ąŠą▒ą╗ą░čüč鹥ą╣ ą┐ą░ą╝čÅčéąĖ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą▓čŗą┤ąĄą╗ąĄąĮčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ą┤ąŠ ąĄą│ąŠ ą┐ą░ą┤ąĄąĮąĖčÅ).
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĪčéčĆą░ąĮąĖčåą░ 2 ąĖąĘ 2
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 33 ]
,
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 26
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ










")