|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąĀą░ą▒ąŠčéą░ čü MPU9250
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 2 ąĖąĘ 2
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 36 ] |
, |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
didim

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 19, 2016 10:45:14 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąÜą░čĆą╝ą░: 3
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -6
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĖčÄąĮ 25, 2013 23:22:11
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 28
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą╝čŗčłą║čā č鹊ąČąĄ ą┤ąĄą╗ą░ą╗, čéą░ą╝ ąĖ ą│ąĖčĆąŠčüą║ąŠą┐ ąĮąĄ ą▓čüąĄą│ą┤ą░ ąĮčāąČąĄąĮ - čģąŠčĆąŠčłąŠ čĆą░ą▒ąŠčéą░ąĄčé ąĖ čćąĖčüč鹊 ąĮą░ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆąĄ, ą┐čĆą░ą▓ą┤ą░ čÅ ąĖ ąĮąĄ ą┤ąĄą╗ą░ą╗ č鹊čćąĮąŠčüčéąĖ ą▓ ą┤ąĄčüčÅčéčŗąĄ ą┤ąŠą╗ąĖ ą│čĆą░ą┤čāčüą░ - ą╝ąĮąĄ ą║ą░ąČąĄčéčüčÅ ą▓ą┐ąŠą╗ąĮąĄ čģą▓ą░čéą░ąĄčé ąĄą┤ąĖąĮąĖčå ą│čĆą░ą┤čāčüąŠą▓, čćč鹊 ą▒ąŠą╗čīčłąĄ čłčāą╝ą░ čüą░ą╝ąŠą│ąŠ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░, č鹊ąČąĄ ą┤čāą╝ą░ą╗ ąĄčēąĄ ą┤ąČąŠą╣čüčéąĖą║ čüą┤ąĄą╗ą░čéčī, ąĮąŠ ą┐ąŠą║ą░ ą║ čŹč鹊ą╣ č鹥ą╝ąĄ čü ą╝ąŠą╝ąĄąĮčéą░ ąĮą░čćą░ą╗ą░ č鹥ą╝čŗ ąĮąĄ čāą┤ą░ą╗ąŠčüčī ą┐ąŠą┤ąŠą╣čéąĖ ąĖąĘ-ąĘą░ ąŠčéčüčāčéčüčéą▓ąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ąĮąĄčüą║ąŠąĮčćą░ąĄą╝čŗčģ ą┐čĆąŠą▒ą╗ąĄą╝ ą▓ ą┤čĆčāą│ąĖčģ ą▓ąŠą┐čĆąŠčüą░čģ
ą¤ąŠ čüčāčéąĖ ą╝ąĮąĄ ąŠč湥ąĮčī ąĖąĮč鹥čĆąĄčüąĄąĮ ą▓ą░čł ąŠą┐čŗčé ąĖ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā čäąĖą╗čīčéčĆą░ ąĖ ąŠčüąĄą╣ ą┤ą░čéčćąĖą║ąŠą▓, ą▓ąŠą┐čĆąŠčüąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąÆ ą┤ą░čéą░čłąĖč鹥 ą╝ąĮąŠą│ąŠ čĆą░ąĘ ą┐čĆąŠą╗ąĖčüčéčŗą▓ą░ą╗ ąĖą╗ą╗čÄčüčéčĆą░čåąĖčÄ čü ąŠčüčÅą╝ąĖ ą┤ą░čéčćąĖą║ąŠą▓ ąĖ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ č鹊ą╗čīą║ąŠ čüąĄą╣čćą░čü ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ąĖ ą┐čĆą░ą▓ą┤ą░ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé! ąöčāą╝ą░čÄ, ąĖąĘ-ąĘą░ čŹč鹊ą│ąŠ ą┐ąŠ ą▒ąŠą╗čīčłąĄą╣ čćą░čüčéąĖ ąĖ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĮąĄą▓ą╝ąĄąĮčÅąĄą╝čŗą╣ ą┤čĆąĖčäčé ą┐ąŠą║ą░ąĘą░č鹥ą╗ąĄą╣ ą▓ ą╝ąŠąĄą╝ čüą╗čāčćą░ąĄ, ą░ ąĘą░ąŠą┤ąĮąŠ ąĖ ąĮąĖ ąŠą┤ąĖąĮ ą░ą╗ą│ąŠčĆąĖčéą╝ čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ čüąŠą▓ą╝ąĄčüčéąĮąŠ ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆą░ ąĮąĄ ą┤ą░ą▓ą░ą╗ ą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ čĆąĄąĘčāą╗čīčéą░č鹊ą▓
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Serj_K
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 19, 2016 11:29:35 |
|
ąÜą░čĆą╝ą░: 16
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 177
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 14, 2012 16:11:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 718
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą» ą┤ą░ąČąĄ ąĮąĄ ą┐čŗčéą░ą╗čüčÅ ą┤ąŠą▒ąĖą▓ą░čéčīčüčÅ ą║ą░ą║ąŠą╣-č鹊 ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ, ą┐čĆąŠčüč鹊 ą┐ąŠą╗čāčćąĖą╗ ąĮąĄą║ąĖą╣ čĆąĄąĘčāą╗čīčéą░čé, ą░ ą┐ąŠč鹊ą╝ ą┐ąŠą┤ąŠą│ąĮą░ą╗ ą┐ąŠą┤ ą▓ąĖąĘčāą░ą╗čīąĮąŠ ą┐čĆąĖą╝ąĄčĆąĮąŠ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣.
ą¤ąŠ ą╗ąŠą│ąĖą║ąĄ, ą│ąĖčĆąŠčüą║ąŠą┐ ąĖ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ą┤ą░čÄčé ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą░ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆ - ą░ą▒čüąŠą╗čÄčéąĮčŗąĄ.
ą¤čĆąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĄ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆą░ čüąŠčģčĆą░ąĮčÅą╗ ąĄą│ąŠ ąĮą░čćą░ą╗čīąĮąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ąĖ ą┐ąŠč鹊ą╝ ą▓čŗčćąĖčéą░ą╗ ąĖąĘ čĆąĄąĘčāą╗čīčéą░čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ. ą¤čĆąĖ čŹč鹊ą╝ ą┐ąŠčüą╗ąĄ čäąĖą╗čīčéčĆą░ ą┐ąŠą╗čāčćą░ą╗ čüąĖą╗čīąĮąŠąĄ ą▓čĆą░čēąĄąĮąĖąĄ ą▓ąŠą║čĆčāą│ ąŠčüąĖ Z ąĖ ą▒ąŠą╗čéą░ąĮą║čā ą┐ąŠ XY. ąæąĄąĘ čéą░ą║ąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ - ą┐čĆąŠčüč鹊 ą┤ąŠą▒ą░ą▓ąŠčćąĮčŗą╣ čāą│ąŠą╗ ą┐ąŠ Z. ąÆ ąŠą┤ąĮąŠą╣ čüčéą░čéčīąĄ ą▓ąĖą┤ąĄą╗ čāą┐ąŠą╝ąĖąĮą░ąĮąĖąĄ ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓čŗčćąĖčéą░čéčī ąĖąĘ ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆą░ ąĮąĄą║čāčÄ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą▓ąĄą╗ąĖčćąĖąĮčā, ąĘą░ą▓ąĖčüčÅčēčāčÄ ąŠčé č鹥ą║čāčēąĄą╣ ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ąŠą╣ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ.
ąĪąĄą╣čćą░čü čÅ ą┐ąŠą╗čāčćąĖą╗ čĆąĄąĘčāą╗čīčéą░čé, ą║ąŠč鹊čĆčŗą╣ ą╝ąĄąĮčÅ ą▓ą┐ąŠą╗ąĮąĄ čāčüčéčĆą░ąĖą▓ą░ąĄčé, ą┐ąŠčŹč鹊ą╝čā čÅ čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ą│ą╗čāą▒ąČąĄ ą║ąŠą┐ą░čéčī ąĮąĄ ą▒čāą┤čā. ą¤čĆąŠčüč鹊 ą┐ąŠą┤ą▒ąĄčĆčā ąŠą┐čéąĖą╝ą░ą╗čīąĮčāčÄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠčüąĄą╣ ą┐ąŠą▓ąŠčĆąŠčéą░ ą┐čĆąĖ ąŠą║ąŠąĮčćą░č鹥ą╗čīąĮąŠą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ čüąĄąĮčüąŠčĆą░ ą▓ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ ąĖ ą▓čüčæ. ą¤čĆąŠčłąĖą▓ą║čā ąĄčēčæ ą┐ąŠą┤čćąĖčēčā ąĖ ą▓čŗą╗ąŠąČčā ąĘą┤ąĄčüčī ąĖčüčģąŠą┤ąĮąĖą║ąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Serj_K
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą┤ąĄą║ 20, 2016 10:13:25 |
|
ąÜą░čĆą╝ą░: 16
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 177
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 14, 2012 16:11:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 718
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÆčŗą║ą╗ą░ą┤čŗą▓ą░čÄ ąĖčüčģąŠą┤ąĮąĖą║ąĖ. ą¤čĆąŠąĄą║čé ą┐ąŠą┤ Coocox ąĖ ąĄčüčéčī Makefile. ąÆčüčæ Rift-čüą┐ąĄčåąĖčäąĖčćąĮąŠąĄ ą▓čŗčćąĖčüčéąĖą╗ ąĘą░ ąĮąĄąĮą░ą┤ąŠą▒ąĮąŠčüčéčīčÄ. ąĢčüčéčī 2 ą▓ą░čĆąĖą░ąĮčéą░ HID čāčüčéčĆąŠą╣čüčéą▓ - 3-ąŠčüąĄą▓ąŠą╣ ą┤ąČąŠą╣čüčéąĖą║ ąĖ ą╝čŗčłą║ą░ čü 2 ą║ąĮąŠą┐ą║ą░ą╝ąĖ Ōä¢7 ąĖ Ōä¢8. ąóą░ą║ąĖąĄ ąĮąŠą╝ąĄčĆą░ ą║ąĮąŠą┐ąŠą║ ą▓čŗą▒čĆą░ąĮčŗ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĮąĄ ą┤čāą▒ą╗ąĖčĆąŠą▓ą░ą╗ąĖčüčī ą║ąĮąŠą┐ą║ąĖ ąŠčüąĮąŠą▓ąĮąŠą╣ ą╝čŗčłą║ąĖ. "ąØą░ąČąĖą╝ą░čÄčéčüčÅ" ąĮą░ą║ą╗ąŠąĮąŠą╝ čüąĄąĮčüąŠčĆą░ ą▓ą╗ąĄą▓ąŠ/ą▓ą┐čĆą░ą▓ąŠ. ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą║čāčĆčüąŠčĆą░ - ąĮą░ą║ą╗ąŠąĮ ą▓ą┐ąĄčĆčæą┤/ąĮą░ąĘą░ą┤, ą┐ąŠą▓ąŠčĆąŠčé ą▓ą╗ąĄą▓ąŠ/ą▓ą┐čĆą░ą▓ąŠ. ąóą░ą║ čüą┤ąĄą╗ą░ąĮąŠ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čéčĆąĄą║ąĄčĆą░ ą│ąŠą╗ąŠą▓čŗ ą┤ą╗čÅ čłą╗ąĄą╝ą░ ąÆąĀ. ą¤ąŠą║ą░ ąĮą░ąČą░čéąĖąĄ ą║ąĮąŠą┐ąŠą║ ąĮąĄ ą┐čĆąŠą▓ąĄčĆąĖą╗.
ąÆąŠąĘą╝ąŠąČąĮčŗ 2 ą▓ą░čĆąĖą░ąĮčéą░ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ą╗ą░čéčŗ ą╝ąŠą┤čāą╗čÅ - ą┐ą╗ą░čłą╝čÅ, ąŠčüčī ąź čüą╝ąŠčéčĆąĖčé ą▓ą┐čĆą░ą▓ąŠ, ąĖ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠ, ąŠčüčī ąź čüą╝ąŠčéčĆąĖčé ą▓ą╗ąĄą▓ąŠ. ąÆąŠąĘą╝ąŠąČąĮą░ čüą▒ąŠčĆą║ą░ čü ąĖ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆą░. ąĪ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆąŠą╝ ą┐ąŠą║ą░ ąĄčüčéčī ą┐čĆąŠą▒ą╗ąĄą╝čŗ. ą¤čĆąĖ čĆą░ą▒ąŠč鹥 čü ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆąŠą╝ ąĄčüčéčī 2 ą▓ą░čĆąĖą░ąĮčéą░ č乊čĆą╝čāą╗ - ąŠą┤ąĮą░ ąĖąĘ ąĮąĖčģ čÅą║ąŠ ą▒čŗ čü čāčüčéčĆą░ąĮąĄąĮąĖąĄą╝ ąŠčłąĖą▒ą║ąĖ, ąĮąŠ čÅ ą▒ąŠą╗čīčłąŠą╣ čĆą░ąĘąĮąĖčåčŗ ąĮąĄ ąĘą░ą╝ąĄčéąĖą╗.
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆą░čēąĄąĮąĖčÅ ąŠčüąĄą╣ ą╝ąŠąČąĮąŠ ą╝ąĄąĮčÅčéčī ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ 2 čäą░ą╣ą╗ąŠą▓ - ą▓ invensense.c ą┐čĆąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĖ ąĘąĮą░č湥ąĮąĖą╣ čüąĄąĮčüąŠčĆąŠą▓ ąĖą╗ąĖ ą▓ filter.c ą┐čĆąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĖ čāą│ą╗ąŠą▓.
ąöą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĮčāąČąĮčŗčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐čĆąĖ čüą▒ąŠčĆą║ąĄ ąĄčüčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ: USE_MAGNETOMETER, HID_JOYSTIK, X_RIGHT.
ą¤ąŠą║ą░ ą▓čüčæ.
P.S. ą¤ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ą▒ą░ąĘąŠą▓ąŠą╣ čüčģąĄą╝ąŠą╣ Rift ą┐ąŠą╝ąĄąĮčÅą╗ 2 ąĮąŠąČą║ąĖ - USB_DISCONNECT_PIN ąĮą░ ąĀąÉ15 ąĖ INV_SPI_SS ąĮą░ ąĀąÉ1.
| ąÆą╗ąŠąČąĄąĮąĖčÅ: |
 Joystik.rar [288.33 KiB]
Joystik.rar [288.33 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 513
|
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Serj_K
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą┤ąĄą║ 24, 2016 10:44:26 |
|
ąÜą░čĆą╝ą░: 16
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 177
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 14, 2012 16:11:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 718
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĀąĄčłąĖą╗ ą┤ąŠčĆą░ąĘąŠą▒čĆą░čéčīčüčÅ čü ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆąŠą╝. ąÆ ąŠą▒čēąĄą╝ čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠčćčéąĖ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ - ą▓ ąĮą░čćą░ą╗čīąĮąŠą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ ą┤ąČąŠą╣čüčéąĖą║ą░ ąĄčüčéčī ąĮąĄą▒ąŠą╗čīčłąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠ ąŠą┤ąĮąŠą╣ ąĖąĘ ąŠčüąĄą╣, ą▓ąĄčĆąŠčÅčéąĮąŠ ą▓ą╗ąĖčÅąĄčé ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ. ą¤čĆąĖ čĆą░ą▒ąŠč鹥 ą║ą░ą║ ą╝čŗčłą║ą░ ą▓ ąĮą░čćą░ą╗ąĄ ą┤ą░čæčé ą┤ą▓ąĖąČąĄąĮąĖąĄ ą║čāčĆčüąŠčĆą░, ąĮąŠ ąĄčüą╗ąĖ ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠą┤ą▓ąĖą│ą░čéčī, č鹊 ą║čāčĆčüąŠčĆ čāčüą┐ąŠą║ą░ąĖą▓ą░ąĄčéčüčÅ.
ąĪą░ą╝ąĖ ąŠčüąĖ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆą░ ą▒ąŠą╗ąĄąĄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗąĄ, ą║ąŠą│ą┤ą░ čĆą░čüą┐ąŠą╗ą░ą│ą░čÄčéčüčÅ ą▓ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╣ ą┐ą╗ąŠčüą║ąŠčüčéąĖ - čĆą░ąĘą░ ą▓ 2-3. ąÆ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ ą┐ą╗ąŠčüą║ąŠčüčéąĖ ą╝ą░ą║čüąĖą╝čāą╝ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐čĆąĖ ąŠčĆąĖąĄčéą░čåąĖąĖ ąŠčüąĖ čü čüąĄą▓ąĄčĆą░ ąĮą░ čÄą│. ą¤čĆąĖ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ ąĘą░ą┐ą░ą┤-ą▓ąŠčüč鹊ą║ - 0.
ąŻč鹊čćąĮąĖą╗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆą░čēąĄąĮąĖą╣ ą▓ąŠą║čĆčāą│ ąŠčüąĄą╣. ąĪąĄą╣čćą░čü ąĘąĮą░ą║ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĄą╣ - ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą┐čĆąŠčéąĖą▓ čćą░čüąŠą▓ąŠą╣ čüčéčĆąĄą╗ą║ąĖ. ą¤čĆąĖą╝ąĄąĮąĖč鹥ą╗čīąĮąŠ ą║ ą┤ąČąŠą╣čüčéąĖą║čā ąĖ ą╝čŗčłą║ąĄ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĮčāąČąĮčŗčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖą╣ ąĮčāąČąĮąŠ ą▓čŗą▒ąĖčĆą░čéčī čéčĆąĄą▒čāąĄą╝čŗąĄ ąĘąĮą░ą║ąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąŠčüąĖ.
ąÆčŗą║ą╗ą░ą┤čŗą▓ą░čÄ ąĮąŠą▓čŗąĄ ąĖčüčģąŠą┤ąĮąĖą║ąĖ.
| ąÆą╗ąŠąČąĄąĮąĖčÅ: |
Joystik.rar [399.93 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 475
|
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą╗ąĖčéąĖąĄą▓čŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓ EVE ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą░ąĘąĖą░čéčüą║ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░
ąÜą░č湥čüčéą▓ąĄąĮąĮąŠąĄ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąŠčé ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░, ą┤ąŠą╗ąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ąĄą│ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ąĖ čģąĖą╝ąĖč湥čüą║ąĖąĄ čüą▓ąŠą╣čüčéą▓ą░, ą┐čĆąŠčäąĖą╗ąĖ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░, ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖ č鹊ą║ ąĮą░ą│čĆčāąĘą║ąĖ. ą£čŗ čĆą░čüčüą║ą░ąČąĄą╝ ąŠ ą╗ąĖčéąĖą╣-ąĖąŠąĮąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąĮčŗčģ ą▒ą░čéą░čĆąĄčÅčģ EVE ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄčłąĄąĮąĖčÅčģ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąĖčéą░ą╣čüą║ąĖčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹčéąĖčģ ąÉąÜąæ. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čüčéą░čéčīąĄ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą┐ąŠą╝ąŠą│čāčé ąĘą░ą╝ąĄąĮąĖčéčī ą┐čĆąŠą┤čāą║čåąĖčÄ ąĘą░ą┐ą░ą┤ąĮčŗčģ ą▒čĆąĄąĮą┤ąŠą▓ čü ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ čåąĄąĮčŗ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą║ą░č湥čüčéą▓ą░.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
didim
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą┤ąĄą║ 24, 2016 11:00:15 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąÜą░čĆą╝ą░: 3
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -6
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĖčÄąĮ 25, 2013 23:22:11
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 28
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÆ ą║ąŠą┤ ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą╗ą░ąĘąĖą╗, ąĮąŠ ą┤čāą╝ą░čÄ ą▓ąŠčé, ą╝ąŠąČąĄčé ą▒čŗčéčī ąĄčüčéčī čüą╝čŗčüą╗ čüąŠąĘą┤ą░ąĮąĖčÅ ą║ąĮąŠą┐ą║ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮčāą╗čÅ ąĖą╗ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąóąŠ ąĄčüčéčī ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ą┐ąŠą║ą░ąĘą░č鹥ą╗čÅą╝ ą┤ą░čéčćąĖą║ąŠą▓ ąĮčāąČąĮąŠ čüąĖą┤ąĄčéčī čĆąŠą▓ąĮąŠ ąĖą╗ąĖ ą┤ąĄčƹȹ░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆąŠą▓ąĮąŠ ą║ ą╝ąŠąĮąĖč鹊čĆčā, ą░ ąĄčüą╗ąĖ ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠą▓ąĄčĆąĮčāčéčīčüčÅ ąĖą╗ąĖ ąŠčéą║ąĖąĮčāčéčīčüčÅ ąĮą░ čüą┐ąĖąĮą║čā čāą│ą╗čŗ ąĖąĘą╝ąĄąĮčÅčéčüčÅ ąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą║čāčĆčüąŠčĆą░ č鹊ąČąĄ, čéą░ą║ ą▓ąŠčé ą▓čŗą▒čĆą░ą▓ čāą┤ąŠą▒ąĮąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ, ąČą╝ąĄą╝ ąŠą▒ąĮčāą╗ąĄąĮąĖąĄ ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄčé čüą╝ąĄčēąĄąĮąĖąĄ ąĖ čāčćąĖčéčŗą▓ą░ąĄčé ąĄą│ąŠ ą┐čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮčāą╗ąĄą▓ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą║čāčĆčüąŠčĆą░ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą▓ ą╗čÄą▒ąŠą╝ čāą┤ąŠą▒ąĮąŠą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
kharlashkin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 06, 2017 18:21:54 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 06, 2017 15:51:36
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Serj_K ą┐ąĖčüą░ą╗(ą░): ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą║ą▓ą░č鹥čĆąĮąĖąŠąĮ ą┐čĆąĖčłą╗ąŠčüčī čĆą░ąĘą▒ąĖčĆą░čéčīčüčÅ čü ą▓čģąŠą┤ąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░ ą£čŹą┤ąČą▓ąĖą║ą░ - ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĄą╝čā ąĮčāąČąĮąŠ ą┤ą░ąĮąĮčŗąĄ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ąĖą╝ąĄąĮąĮąŠ ą▓ čĆą░ą┤ąĖą░ąĮą░čģ ą┤ą░ą▓ą░čéčī. ąÉą┐ąĮčā č鹥ą╝ą║čā, ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮąŠ čŹč鹊 čĆąĄą░ą╗čīąĮąŠ. ąØąĄ ą┐ąŠą┤ąĄą╗ąĖč鹥čüčī ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ čćč鹊 ą║ č湥ą╝čā? ąĪ ąŠčüąĄąĮąĖ ą┐čĆąŠčłą╗ąŠą│ąŠ ą│ąŠą┤ą░ č鹊ąČąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī MPU 9250, ąĮąŠ čüčĆą░ąĘčā ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī. ąĪąĄą╣čćą░čü čģąŠčćčā ą▓čüčæ-čéą░ą║ąĖ ą▓ąĄčĆąĮčāčéčīčüčÅ ą║ čŹč鹊ą╝čā ą▓ąŠą┐čĆąŠčüčā, ą┤ą░ą╣ ą┤čāą╝ą░čÄ čüą┐čĆąŠčłčā ąĄčēčæ čā ąÆą░čü - "ąŚą░ čüą┐čĆąŠčü ąĮąĄ ą▒čīčÄčé ą▓ ąĮąŠčü" 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
foxit
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 06, 2017 19:01:39 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
 |
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 16, 2007 00:40:17
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 262
ą×čéą║čāą┤ą░: ąŻą║čĆą░ąĖąĮą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Serj_K ą┐ąĖčüą░ą╗(ą░): ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą║ą▓ą░č鹥čĆąĮąĖąŠąĮ ą┐čĆąĖčłą╗ąŠčüčī čĆą░ąĘą▒ąĖčĆą░čéčīčüčÅ čü ą▓čģąŠą┤ąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░ ą£čŹą┤ąČą▓ąĖą║ą░ - ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĄą╝čā ąĮčāąČąĮąŠ ą┤ą░ąĮąĮčŗąĄ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ąĖą╝ąĄąĮąĮąŠ ą▓ čĆą░ą┤ąĖą░ąĮą░čģ ą┤ą░ą▓ą░čéčī. ąÉą┐ąĮčā č鹥ą╝ą║čā, ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮąŠ čŹč鹊 čĆąĄą░ą╗čīąĮąŠ. ąØąĄ ą┐ąŠą┤ąĄą╗ąĖč鹥čüčī ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ čćč鹊 ą║ č湥ą╝čā? ąĪ ąŠčüąĄąĮąĖ ą┐čĆąŠčłą╗ąŠą│ąŠ ą│ąŠą┤ą░ č鹊ąČąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī MPU 9250, ąĮąŠ čüčĆą░ąĘčā ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī. ąĪąĄą╣čćą░čü čģąŠčćčā ą▓čüčæ-čéą░ą║ąĖ ą▓ąĄčĆąĮčāčéčīčüčÅ ą║ čŹč鹊ą╝čā ą▓ąŠą┐čĆąŠčüčā, ą┤ą░ą╣ ą┤čāą╝ą░čÄ čüą┐čĆąŠčłčā ąĄčēčæ čā ąÆą░čü - "ąŚą░ čüą┐čĆąŠčü ąĮąĄ ą▒čīčÄčé ą▓ ąĮąŠčü" ą¤čĆąĖčüąŠąĄą┤ąĖąĮčÅčÄčüčī
| ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī aen ąĪą▒ ą╝ą░ą╣ 06, 2017 19:36:34, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ. |
| ąØą░čĆčāčłąĄąĮąĖąĄ ą¤čĆą░ą▓ąĖą╗ č乊čĆčāą╝ą░ ą┐. 2.7 |
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
kharlashkin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 06, 2017 20:30:36 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 06, 2017 15:51:36
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØčāąČąĮąŠ ąĮą░ą▓ąĄčĆąĮąŠąĄ ą▒ąŠą╗ąĄąĄ ą║ąŠčĆčĆąĄą║čéąĮąŠ čĆą░čüą║čĆčŗčéčī čćč鹊 čā ą╝ąĄąĮčÅ ąĄčüčéčī ąĖ čćč鹊 čģąŠč鹥ą╗ąŠčüčī ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī. ą¦č鹊 ąĄčüčéčī: 1. ąĪąŠą▒čĆą░ą╗ ąĖąĘ ą┐ąŠą┤čĆčāčćąĮčŗčģ ą╝ą░č鹥čĆąĖą░ą╗ąŠą▓ ą┐ą╗ą░čéč乊čĆą╝čā ąōčīčÄ-ąĪčéčÄą░čĆčéą░ (čüą║čĆąĄą┐ą║ąĖ, 6 čüąĄčĆą▓, ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║čāčüą║ąŠą▓ čāą┐ą░ą║ąŠą▓ąŠčćąĮąŠą│ąŠ ą┐ąŠą╗ąĖčŹčéąĖą╗ąĄąĮą░). 2. ą¤ąĄčĆąĄą┐ą░čÅą╗ ąĮąĄą╝ąĮąŠą│ąŠ čüąĄčĆą▓ąŠą┐čĆąĖą▓ąŠą┤čŗ (ą┤ąŠą▒ą░ą▓ąĖą╗ ą┐čĆąŠą▓ąŠą┤ąŠą║ čüąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ čü ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░), čćč鹊ą▒čŗ čüąĮąĖą╝ą░čéčī čāą│ąŠą╗ ą┐ąŠą▓ąŠčĆąŠčéą░ čüąĄčĆą▓. ą¦č鹊 čģąŠč湥čéčüčÅ ą┐ąŠą╗čāčćąĖčéčī: 1. ąØą░ ąŠčüąĮąŠą▓čā ąĖ ą┐ąŠą┤ą▓ąĖąČąĮčāčÄ čćą░čüčéčī ą┐ą╗ą░čéč乊čĆą╝čŗ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┤ą░čéčćąĖą║ąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ, čāąČąĄ ąĄčüčéčī ą┤ą▓ą░ 9250. 2. ąŚą░ą▓ąĄčüčéąĖ ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ ą┤ą░čéčćąĖą║ąŠą▓ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ Blender ą┤ą╗čÅ ą▓ąĖąĘčāą░ą╗ąĖąĘą░čåąĖąĖ. ąĪ č湥ą╝ čüąĄą╣čćą░čü ą▒ąŠčĆčÄčüčī - ą┐čĆąŠą▒ąŠą▓ą░ą╗ ą║ąŠą┤ ą┤ą╗čÅ 9250 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą▓ Blender č湥čĆąĄąĘ pyserial, ą║ąŠč鹊čĆčŗą╣ ą▓čĆąŠą┤ąĄ ą┤ąŠą╗ąČąĄąĮ ąŠčéą┤ą░ą▓ą░čéčī ą║ą▓ą░č鹥čĆąĮąĖąŠąĮčŗ ą┤ą╗čÅ ą▓čĆą░čēąĄąĮąĖčÅ ą║čāą▒ąĖą║ą░ (ą┐čĆąŠčüč鹊ą╣ ą╝ąŠą┤ąĄą╗ąĖ), ąĮąŠ ą┐ąŠą║ą░ ą▓čüčæ čćč鹊 ą┐čĆąŠą▒ąŠą▓ą░ą╗ ąĮąĄą║ąŠčĆčĆąĄą║čéąĮąŠ čŹč鹊čé čüą░ą╝čŗą╣ ą║čāą▒ąĖą║ ą▓čĆą░čēą░ąĄčé. ą¤čĆą░ą▓ą┤ą░ čÅ čüčĆą░ąĘčā čüčéą░čĆą░ą╗čüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ 9250 ą┐ąŠ ą╝ą░ą║čüąĖą╝čāą╝čā (AHRS + ą░ą╗ą│ąŠčĆąĖčéą╝ ą£ą░ą┤ąČą▓ąĖą║ą░/ą£ą░čģąŠąĮąĖ), čüąĄą╣čćą░čü ą▒čāą┤čā ą┐čĆąŠą▒ąŠą▓ą░čéčī čü ąĮąĖąĘąŠą▓. ąÉą┤ąĄą║ą▓ą░čéąĮčŗą╣ ąĖ ą┐ąŠąĮčÅčéąĮčŗą╣ ą┐ąŠčģąŠąČąĖą╣ ą║ąŠą┤ ąĄčüčéčī čā ąÉą╝ą┐ąĄčĆą║ąĖ. ąśčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ąČąĄą╗ąĄąĘąŠ - ą┤ą░čéčćąĖą║ąĖ ąŠčé ą┤čÅą┤čÄčłą║ąĖ ąøčÅąŠ, ą░čĆą┤čāąĖąĮą║ą░ Uno R3 (čćąĖą┐ 328čĆ) ąŠčé ąĮąĄą│ąŠ ąČąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Serj_K
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 08, 2017 16:02:23 |
|
ąÜą░čĆą╝ą░: 16
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 177
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 14, 2012 16:11:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 718
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
kharlashkin ą┐ąĖčüą░ą╗(ą░): ąØąĄ ą┐ąŠą┤ąĄą╗ąĖč鹥čüčī ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ čćč鹊 ą║ č湥ą╝čā? ąÉ ą▓ čćčæą╝ ą┐čĆąŠą▒ą╗ąĄą╝ą░? ąśčüčģąŠą┤ąĮąĖą║ąĖ čäąĖą╗čīčéčĆą░ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ. ąØčāąČąĮąŠ ą┐čĆąŠčüč鹊 ą┐ąŠą┤ąŠą▒čĆą░čéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ą╗čÅ čéčĆąĄą▒čāąĄą╝ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čĆąĄą░ą║čåąĖąĖ. ą» ą▓ čäąĖą╗čīčéčĆ ą┤ą░ąĮąĮčŗąĄ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĮąĄ ą┐ąĄčĆąĄą┤ą░čÄ - ąŠąĮąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ąŠ ą▓ąĮąĄčłąĮąĄą╣ čüčéčĆčāą║čéčāčĆąĄ ąĖ ą▒ąĄčĆčāčéčüčÅ ąĖąĘ ąĮąĄčæ. ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą┐čĆąĖą▓čÅąĘą║ąĄ ąŠčüąĄą╣ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆą░ ą║ ąŠčüčÅą╝ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░/ą│ąĖčĆąŠčüą║ąŠą┐ą░. ą×ąĮąĖ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé ąĖ čŹč鹊 ąĮčāąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī. ąÆ ą╝ą░ąĮčāą░ą╗ąĄ ąĮą░ čćąĖą┐ ąŠčüąĖ čāą║ą░ąĘą░ąĮčŗ.
| ąÆą╗ąŠąČąĄąĮąĖčÅ: |
filter.c [11.96 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 772
|
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
kharlashkin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 08, 2017 16:26:47 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 06, 2017 15:51:36
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą┐čĆąĖą▓čÅąĘą║ąĄ ąŠčüąĄą╣ ą╝ą░ą│ąĮąĄč鹊ą╝ąĄčéčĆą░ ą║ ąŠčüčÅą╝ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░/ą│ąĖčĆąŠčüą║ąŠą┐ą░. ą×ąĮąĖ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé ąĖ čŹč鹊 ąĮčāąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī. ąÆ ą╝ą░ąĮčāą░ą╗ąĄ ąĮą░ čćąĖą┐ ąŠčüąĖ čāą║ą░ąĘą░ąĮčŗ. ąśą╝ąĄąĮąĮąŠ ąĘą░ čŹč鹊 ąÆą░ą╝ ą▒ąŠą╗čīčłąŠąĄ čüą┐ą░čüąĖą▒ąŠ, ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ čÅą▓ąĮąŠ čŹč鹊 ąĮąĖą│ą┤ąĄ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ. ą¤ąŠą╣ą┤čā ą║ąŠą┐ą░čéčī ą┤ą░čéą░čłąĖčé. ąÆąĖąČčā čćč鹊 ą▓ ąÆą░čłąĄą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čäąĖą╗čīčéčĆą░ čāąČąĄ ąĄčüčéčī ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą║ą░. ąæčŗą╗ąŠ ą▒čŗ ąĮąĄą┐ą╗ąŠčģąŠ ąŠą┐ąĖčüą░čéčī ąÆą░čł ąŠą┐čŗčé ą┐ąŠčłą░ą│ąŠą▓ąŠ ąĖ čü ą▒ąŠą╗ąĄąĄ ą┐čĆąŠčüčéčŗą╝ ą║ąŠą┤ąŠą╝ ą┐ąŠą┤ ą░čĆą┤čāąĖąĮą║čā ąĮąŠ čŹč鹊 čéą░ą║ - ą╝ąĄčćčéčŗ... 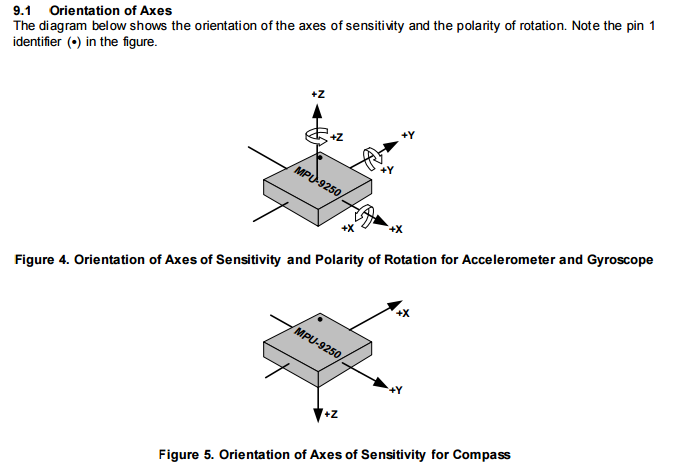
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Serj_K
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 08, 2017 18:18:12 |
|
ąÜą░čĆą╝ą░: 16
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 177
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 14, 2012 16:11:35
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 718
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą» ą┐ąŠą┤ ą░čĆą┤čāąĖąĮčā ąĮąĄ ą┐ąĖčłčā. ąØąŠ čäąĖą╗čīčéčĆ - čŹč鹊 ą╝ą░č鹥ą╝ą░čéąĖą║ą░ ąĖ ąŠąĮą░ ą┐ąŠą┤ ą░čĆą┤čāąĖąĮąŠą╣ ą▒čāą┤ąĄčé čéą░ą║ą░čÅ ąČąĄ, ąĮąĄ ą┐čĆąŠčēąĄ. ą» čéą░ą║ ą┐ąŠąĮčÅą╗, čćč鹊 ą┐ąŠą┤ ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą║ąŠą╣ ąÆčŗ ą┐ąŠąĮąĖą╝ą░ąĄč鹥 ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĮčāčÄ ąŠčłąĖą▒ą║čā. ąśčüą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą║ąŠą┤ čā ą╝ąĄąĮčÅ ąĘą░ą║ąŠą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮ - ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčéą░čĆčŗą╣ ą▓ą░čĆąĖą░ąĮčé, čéą░ą║ ą║ą░ą║ ąŠčüąŠą▒ąŠą╣ čĆą░ąĘąĮąĖčåčŗ čÅ ąĮąĄ ąĘą░ą╝ąĄčéąĖą╗, ą╝ąŠąČąĄčé čÅ ąĮąĄ ą┐čĆą░ą▓ ą▓ čŹč鹊ą╝. ą¤čĆąŠčüč鹊 čā ą╝ąĄąĮčÅ čāą│ą╗čŗ ą┐ąŠą▓ąŠčĆąŠčéą░ ą╝ąĄą╗ąĄąĮčīą║ąĖąĄ - ą▓ čéčĆąĄą║ąĄčĆąĄ ą│ąŠą╗ąŠą▓čŗ. ąöą╗čÅ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ čÅ ą┤ą░ąČąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĮąĄ ą┤ąĄą╗ą░čÄ, čéą░ą║ ą║ą░ą║ čĆąĄąĘčāą╗čīčéą░čé ą╝ąĄąĮčÅ čāčüčéčĆą░ąĖą▓ą░ąĄčé.
ąÉ ąĮą░ ąŠčĆąĖąĄąĮčéą░čåąĖčÄ ąŠčüąĄą╣ čÅ čüą░ą╝ ą▒čŗą╗ ąĮą░ą┐ąŠčĆąŠą╗čüčÅ. ąśą╝ ą▒čŗ ą▓ ą┤ąŠą║ąĄ čŹč鹊 ą▓čŗą┤ąĄą╗ąĖčéčī ą▒ąŠą╗ąĄąĄ čÅą▓ąĮąŠ, ą░ č鹊 ąĮą░čĆąŠą┤ ą┐ąŠ ą┤ąĖą░ą│ąŠąĮą░ą╗ąĖ čćąĖčéą░ąĄčé.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
kharlashkin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 08, 2017 18:44:08 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 06, 2017 15:51:36
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÉ ąĮą░ ąŠčĆąĖąĄąĮčéą░čåąĖčÄ ąŠčüąĄą╣ čÅ čüą░ą╝ ą▒čŗą╗ ąĮą░ą┐ąŠčĆąŠą╗čüčÅ. ąśą╝ ą▒čŗ ą▓ ą┤ąŠą║ąĄ čŹč鹊 ą▓čŗą┤ąĄą╗ąĖčéčī ą▒ąŠą╗ąĄąĄ čÅą▓ąĮąŠ, ą░ č鹊 ąĮą░čĆąŠą┤ ą┐ąŠ ą┤ąĖą░ą│ąŠąĮą░ą╗ąĖ čćąĖčéą░ąĄčé. ąÆčŗ ą▒čŗ čāčüą┐ąĄą╗ąĖ ąĮą░ ą┐ą░čĆčā čćą░čüąŠą▓ čĆą░ąĮčīčłąĄ - čÅ ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░ą║ą╗ąĄąĖą╗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠčüąĄą╣ ąĮą░ ą║ąŠčĆąŠą▒ąŠą║, ą┤ą╗čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą║ąŠą╝ą┐ą░čüą░ ą┐ąŠ čŹč鹊ą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ. ąØčā čģąŠčéčī ąĮąĄ čāčüą┐ąĄą╗ čü ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąŠą╣ 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
kharlashkin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ąĖčÄąĮ 10, 2017 12:20:26 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 06, 2017 15:51:36
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÆą┤ąŠą▓ąŠą╗čī ąĮą░ąĖą│čĆą░ą▓čłąĖčüčī čü čäąĖą╗čīčéčĆą░ą╝ąĖ ąĖ ąĮąĄ ą┐ąŠą╗čāčćąĖą▓ ą▓ąĮčÅčéąĮąŠą│ąŠ čĆąĄąĘčāą╗čīčéą░čéą░ - ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ ą░čĆą┤čāąĖąĮąŠą▓čüą║ąĖą╣ ą║ąŠą┤ čü dmp ą┤ą╗čÅ 9250. ąĀąĄąĘčāą╗čīčéą░čé ą▒ąŠą╗ąĄąĄ č湥ą╝ čāčüčéčĆą░ąĖą▓ą░ąĄčé:
ąöčāą╝ą░čÄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖ ą┤ą░ą╗ąĄąĄ ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą║ą▓ą░č鹥čĆąĮąĖąŠąĮčŗ + ą┤ąŠą▒ą░ą▓ąĖčéčī ą║ąŠčĆčĆąĄą║čåąĖčÄ ą┐ąŠ ą║ąŠą╝ą┐ą░čüčā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
machestro
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 02, 2017 17:36:48 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čüąĄąĮ 04, 2014 11:49:00
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą¤čĆąĖą▓ąĄčéčüčéą▓čāčÄ ą▓čüąĄčģ čāčćą░čüčéąĮąĖą║ąŠą▓ č鹥ą╝čŗ. ą¤čĆąŠčćąĖčéą░ą▓ č鹥ą╝čā, ą┐ąŠąĮčÅą╗, čćč鹊 ąĄčüčéčī ą╗čÄą┤ąĖ ą║ąŠč鹊čĆčŗąĄ čģąŠčĆąŠčłąŠ čĆą░ąĘą░ą▒čĆą░ą╗ąĖčüčī čü ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆąŠą╝. ąźąŠč鹥ą╗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹč鹊čé čćąĖą┐ (č鹊ą╗čīą║ąŠ ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆąŠą╝) ą┐ąŠ spi čü čćą░čüč鹊č鹊ą╣ ąŠą┐čĆąŠčüą░ 20 MHz. ąØąŠ ą║ą░ą║ čÅ ą┐ąŠąĮčÅą╗ ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą┐ąŠ i2c čü čćą░čüč鹊č鹊ą╣ 400 kHz. ąóą░ą║ ą╗ąĖ čŹč鹊?
ąÆ ą║čĆą░čéčåąĄ ąŠą┐ąĖčłčā, čćč鹊 čģąŠč鹥ą╗ čüą┤ąĄą╗ą░čéčī. ąĢčüčéčī ą┤ą▓ąĖą│ą░č鹥ą╗čī čü ą╝ą░ą│ąĮąĖč鹊ą╝ ąĮą░ ą▓ą░ą╗čā. ą£ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆąŠą╝ čģąŠč鹥ą╗ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą▓ą░ą╗ą░ ąĖ ąĄą│ąŠ čüą║ąŠčĆąŠčüčéčī. ąöą▓ąĖą│ą░č鹥ą╗čī ą▒čāą┤ąĄčé ą▓čĆą░čēą░čéčīčüčÅ čü max čüą║ąŠčĆąŠčüčéčīčÄ 600 ąŠą▒/ą╝ąĖąĮ. ąōąŠč鹊ą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čāčćą░čéčī čü čćą░čüč鹊č鹊ą╣, ą┐čĆąĖą╝ąĄčĆąĮąŠ 40ą║ąōčå. ą¤ąŠ i2c ą▓čüąĄ ą▓čĆąŠą┤ąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī, ąĮąŠ ą┐čĆąĖ ą╝ą░ą╗ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓čĆą░čēąĄąĮąĖčÅ. ą¤ąŠ spi ą║ą░ą║ čÅ ą┐ąŠąĮąĖą╝ą░čÄ ąĮąĄ čüčāą┤čīą▒ą░. ą¤čĆąŠčłčā ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčéčī ąĖą╗ąĖ ąŠą┐čĆąŠą▓ąĄčĆą│ąĮčāčéčī ą╝ąŠąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Sencis
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 20, 2020 18:44:15 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ čüąĄąĮ 10, 2018 15:58:55
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÉ ą║ą░ą║ ąŠą▒čüč鹊čÅčé ą┤ąĄą╗ą░ čā ą┤ą░čéčćąĖą║ą░ čü ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖčÅ ą╗ąĖąĮąĄą╣ąĮąŠą│ąŠ čāčüą║ąŠčĆąĄąĮąĖčÅ? ąŻ ą╝ąĄąĮčÅ ąĮą░ 9250 čü čäąĖą╗čīčéčĆąŠą╝ ą£ą░ąČą┤ą▓ąĖą║ą░ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╝ čäąĖą╗čīčéčĆąŠą╝ ąĮą░ 6050 čćč鹊-č鹊 čĆą░ą▒ąŠčéą░ąĄčé, ąĮąŠ ąĄčüą╗ąĖ ą▓ąĘčÅčéčī ąĮą░ą┐čĆąĖą╝ąĄčĆ BNO 055 č鹊 čéą░ą╝ ą▓ąŠąŠą▒čēąĄ ąĮąĄčé čĆąĄą░ą║čåąĖąĖ č鹊ąĮą│ą░ąČą░ ąĮą░ ą╗ąĖąĮąĄą╣ąĮąŠąĄ čāčüą║ąŠčĆąĄąĮąĖąĄ (ą┐čĆąĖ čāčüą╗ąŠą▓ąĖąĖ ą║ąŠąĮąĄčćąĮąŠ čćč鹊 č鹊ąĮą│ą░ąČ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ąĮąĄ ą╝ąĄąĮčÅą╗čüčÅ ą░ ą┤ą░čéčćąĖą║ ą┐čĆąŠčüč鹊 ą┤ą▓ąĖą│ą░ą╗čüčÅ ą▓ą┐ąĄčĆčæą┤). ąÆąŠą┐čĆąŠčü, čŹč鹊 ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą┤ą░čéčćąĖą║ą░ ąĖą╗ąĖ ą╝ą░č鹥ą╝ą░čéąĖą║ąĖ čäąĖą╗čīčéčĆą░? ąÆ č鹥ąŠčĆąĖąĖ čé.ą║. čŹč鹊čé ą┤ą░čéčćąĖą║ ąŠč湥ąĮčī ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ąĖ ą│ąĖčĆąŠčüą║ąŠą┐ ą░ą┐ą┐ą░čĆą░čéąĮąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą┤ąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖ ą┤ą░ąĮąĮčŗąĄ čāčüą║ąŠčĆąĄąĮąĖčÅ ą╝ąŠą│čāčé ą┐ąĄčĆąĄčüčćąĖčéčŗą▓ą░čéčīčüčÅ ą▓ čāą│ą╗ąŠą▓čāčÄ čüą║ąŠčĆąŠčüčéčī, čŹč鹊 ą▒čŗ ąŠą▒čŖčÅčüąĮąĖą╗ąŠ ąĄą│ąŠ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ ą▓ąĖą▒čĆą░čåąĖčÅą╝ ąĖ ą╗ąĖąĮąĄą╣ąĮąŠą╝čā čāčüą║ąŠčĆąĄąĮąĖčÄ ąĮąŠ č鹊ą│ą┤ą░ ąĮąĄ ą┐ąŠąĮčÅčéąĮąŠ ą║ą░ą║-ąČąĄ ąĮą░ ąĮčæą╝ ą┤ąĄą╗ą░čÄčé ą┐ąŠą╗čæčéąĮčŗąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ (ą┤ą╗čÅ ą┤čĆąŠąĮąŠą▓) čéą░ą╝ ą▓ąĄą┤čī ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖčÅ ą▓ąĖą▒čĆą░čåąĖą╣ ąĖ ą╗ąĖąĮąĄą╣ąĮąŠą│ąŠ čāčüą║ąŠčĆąĄąĮąĖčÅ ąĮčāąČąĮą░ ąŠą▒čÅąĘą░č鹥ą╗čīąĮą░, ą▓ąŠąĘą╝ąŠąČąĮąŠ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé č鹊ą╗čīą║ąŠ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ąĖ ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆ ą░ ą│ąĖčĆąŠčüą║ąŠą┐ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┤čĆčāą│ąŠą╣?
ąŚ.ą½. ąÆąĖąČčā ąĘą┤ąĄčüčī ą▓čŗą╗ąŠąČąĄąĮ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé ą║ą▓ą░č鹥čĆąĮąĖąŠąĮąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ ąŠčéą╗ąĖčćąĮčŗą╣ ąŠčé ą▓ąĄčĆčüąĖąĖ ąĮą░ ąŠčäčä čüą░ą╣č鹥, čÅ ąĖčüą┐ąŠą╗čīąĘčāčÄ ąĮąĄą╝ąĮąŠą│ąŠ ą┤čĆčāą│ąŠą╣ ą▓ą░čĆąĖą░ąĮčé ą║ąŠą┤ą░ ąĮąŠ č鹊ąČąĄ čü ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖčÅą╝ąĖ ą╝ąŠąČąĄčé ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą▓ čŹč鹊ą╝?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Saveliy94
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą▒ąŠčéą░ čü MPU9250 ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 07, 2021 10:40:51 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 07, 2021 10:25:55
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą¤čĆąĖą▓ąĄčéčüčéą▓čāčÄ ą▓čüąĄčģ.
ąĀąĄą▒čÅčé ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░.
ąØąĄą┤ąĄą╗čÄ ą┐čŗčéą░čÄčüčī čĆą░ąĘąŠą▒čĆą░čéčüčÅ čü ą┤ą░čéčćąĖą║ąŠą╝ MPU-9250.
ąØąĄ ą┐ąŠąĮąĖą╝ą░čÄ ą║ą░ą║ ąĄą│ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī.
ą¦ąĖčéą░čÄ ą┤ą░čéą░čłąĖčé ąĖ ąĮąĄ ą╝ąŠą│čā ąĮąĖč湥ą│ąŠ ą┐ąŠąĮčÅčéčī.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄ ąĮą░ atmega168 ą▓ codevision-ąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 2 ąĖąĘ 2
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 36 ] |
, |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 25 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|










